以競賽項目為載體的控制技術基礎課程改革
2023-01-13 12:04:04曹忠亮巢淵丁力黃明單文桃
高師理科學刊 2022年11期
曹忠亮,巢淵,丁力,黃明,單文桃
以競賽項目為載體的控制技術基礎課程改革
曹忠亮,巢淵,丁力,黃明,單文桃
(江蘇理工學院 機械工程學院,江蘇 常州 213000)
在工程認證背景下,針對當前機械工程領域內學生利用理論知識解決復雜工程問題較差的情況,在機械工程控制類課程控制技術基礎教學中,強化競賽式或項目式教學環節在課程內容體系中的作用.提出了以學生競賽項目“小型無人分揀控制系統設計”融入課程實驗教學改革方案中,以競賽為導向,培養學生工程知識學習、復雜工程設計/開發解決方案的能力.教學改革運行的效果良好,改革后的教學能激發學生的學習興趣,不僅提升了學生的理論與設計相結合能力,還有利于提高學生的創新能力.
控制技術基礎;競賽項目;課程改革
隨著機電一體化技術的快速發展,控制理論在機械工程學科中的應用越來越受到重視.控制技術基礎是機械大類專業課程體系中一門重要的技術基礎課,也是大部分工科專業的必修課程.課程主要應用經典控制論中的基本概念和基本方法來為機-電-液系統建模、分析和校正.該課程為流體傳動與控制、電機與拖動、計算機控制、電氣控制基礎等專業課程運用控制理論提供基礎知識,在課程體系中具有承上啟下的重要作用.通過控制技術基礎課程多輪教學后發現,學生對日常教學比較厭倦,對課程中涉及到的數學建模、系統分析、傳遞函數等基礎知識不能很好消化理解及應用,無法與實際設計應用相結合,亟需對控制技術基礎課程進行改革.
當今移動機器人是智能機器人領域研究的一個重要分支,憑借其自動化程度高、安全可靠、適用性廣等特點被廣泛應用在無人分揀中[1-3].路徑規劃控制作為移動機器人的核心技術,直接影響其在分揀搬運任務過程中的效率及安全性.本設計主要研究小型無人分揀系統的路徑規劃控制部分,其主要涉及分揀搬運場景的環境建模方案設計,分揀搬運過程中的導航與路徑規劃控制問題研究.針對全局路徑規劃控制中存在的遍歷節點數多等問題,提出一種基于動態加權啟發函數的改進A*算法,提高全局路徑規劃的效率和路徑平滑度;針對多車運行中可能發生的任務重疊和路徑沖突等問題,應用基于“領航者-跟隨者”的多車編隊算法,實現多車編隊行進.本文針對中國工程機器人競賽中“小型無人分揀控制系統設計項目”為載體,將控制技術基礎課程中涉及到的基礎理論知識與競賽項目設計相聯系進行課程改革,改革后的教學能激發學生的學習興趣,不僅提升了學生的理論與設計相結合能力,還有利于提高學生的創新能力.
1 面向小型物流場景的AGV路徑規劃總體方案設計
1.1 方案設計
對小型物流場景下的AGV路徑規劃進行需求分析,并按照任務要求和工作場景制定總體方案.針對定位與環境建圖、導航與避障、多車協同等問題進行小型無人分揀系統路徑規劃方案的總體設計與系統開發平臺的選擇.首先,提出設計所依賴的ROS(Robot Operating System,機器人操作系統)與仿真平臺,然后闡述了本設計的軟件開發平臺總體設計方案;其次,對定位與環境建圖、導航與路徑規劃、多車協同等功能模塊進行了算法比較及選用[4].
本設計依托ROS機器人操作系統實現路徑規劃算法,其軟件平臺的總體框架包括2個算法模塊及1個機器人模型模塊(見圖1).ROS機器人操作系統作為小型無人分揀系統路徑規劃程序開發的主要系統框架,以便于配合團隊中通訊、控制、貨物識別等各功能的搭載.

圖1 軟件平臺總體功能模塊
1.2 導航與路徑規劃模塊方案
在小型物流場景中,AGV路徑規劃是指在已建好的二維地圖上,根據相應的算法從起始點到目標點之間尋找一條無沖突的最短路徑.主流的路徑規劃算法有基于搜索、基于采樣和基于智能仿生算法3類[5-6],常見路徑規劃算法對比分析見表1.

表1 不同路徑規劃算法的優缺點
基于搜索的算法主要有Dijkstra算法、A*算法等.A*算法與Djkstra算法相比,增加了啟發函數,以便于在搜索過程中進行啟發式估計,極大提升了搜索效率,同時保證了路徑的最優性,但不適用于在環境復雜的大空間場景;基于采樣的算法主要有RRT(Rapidly-exploring Random Trees,快速拓展隨機樹)算法、RRT*算法,它們應用于動態障礙物、高維狀態等微分限制的情況下,但代價大、實時性差、最佳性差;智能仿生算法是以模擬生物進化、昆蟲覓食、筑巢等行為為對象,主要包括遺傳算法、蟻群算法等,適用于求解和優化復雜問題,具有一定的并行能力,但運算速度緩慢,解早熟.根據小型物流場景空間小、特征環境低等特點以及對物料運輸投送過程中高效率和高準確性的要求,綜合搜索效率和路徑有效性的考慮,選取A*算法作為本文無人分揀系統的全局路徑規劃算法,并在原有的基礎上加以改進,以提高搜索效率,提高路徑平滑度.
2 AGV路徑規劃研究
2.1 AGV單車路徑規劃研究
對現階段視覺SLAM和激光SLAM進行對比后,確定選用點云計算量小,計算便捷,測距準確且不易受光照影響的激光SLAM進行本設計的環境建模方案,并對比選用基于濾波的Gmapping算法.粒子濾波的核心策略是隨機采樣,主要包括初始化、搜索、決策及重采樣4個階段.在初始化過程中,對AGV的位姿進行初始化;在搜索過程中,粒子被隨機分配,然后通過反饋獲得目標相似度信息;在決策階段,通過加權和近似隨機樣本,代入概率密度函數,求取近似積分,最后得出粒子權重;在重采樣階段,根據權重的比例復制粒子并重新分配.粒子濾波算法將重復上述過程,并最終完成地圖估計.主要工作流程見圖2.
為了解決因粒子過多而引起的龐大運算,Gmapping算法從改進提議分布和選擇性重采樣入手,降低粒子數量,避免因重復采樣而引起的粒子耗散問題.在現實場景中Gmapping算法適用于空間較小、特征環境簡單的室內場景下進行定位與建模.
2.2 AGV多車協同路徑規劃研究
無人分揀系統中,AGV單車的路徑規劃只需要在得到的柵格地圖上確定出發點和目標點,搜索出一條最短路徑.針對AGV多車的路徑規劃問題,如何解決分揀任務的分配,避免AGV多車在行進中的路徑沖突,是實現小型物流場景下AGV多車安全高效完成物料搬運的首要任務[7-8].小型無人分揀系統的運行空間來看,可簡化為出發區、取貨區及投放區,同時存在包含建筑物和固定貨架的固定障礙物,以及包含行人、運行中的配套機械的隨機障礙物(見圖3).考慮到AGV單車的功能及多車協同上的分揀運輸效率和任務分配,采用多車編隊行進的移動方式可以有效避免各車之間單獨行進的碰撞沖突,提高多車運行中的安全性,減少運輸空間的占用和任務分配的復雜度.

圖2 粒子濾波算法流程
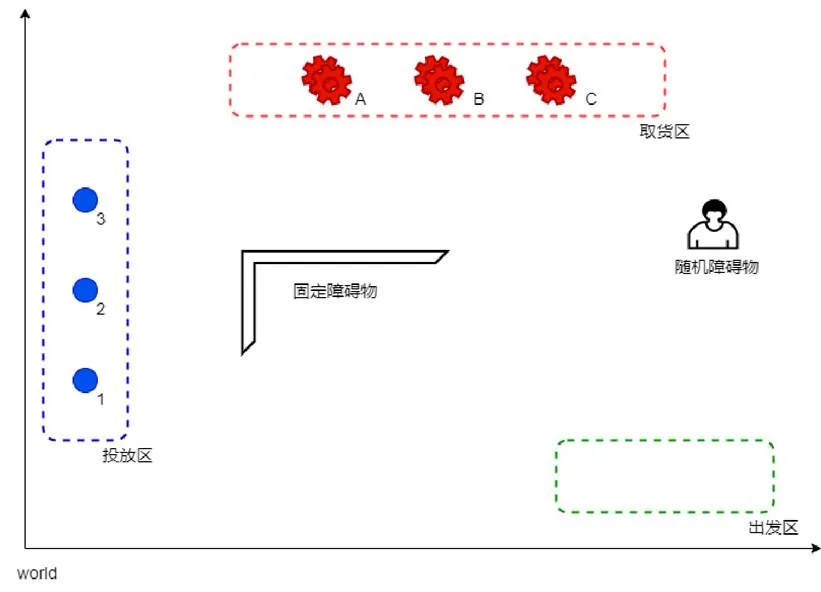
圖3 分揀工作場景示意圖
3 仿真結果與分析
3.1 AGV單車建圖功能仿真
為驗證本文所設計的路徑規劃環境建圖算法的可行性和有效性,在Gazebo仿真軟件中建立環境地圖(見圖4).左半部分主要用于無人分揀系統的多點發布和多車編隊的運行場景,右半部分主要用于全局及局部路徑規劃算法的驗證.同時,需要提前配置好AGV的里程計信息和雷達信息.

圖4 仿真環境場景
3.2 AGV多車編隊協同功能仿真
為驗證多車編隊協同方案的有效性和穩定性,需要將URDF模型以3輛AGV的形式導入到Gazebo仿真環境中,并對每輛車的命名和tf坐標進行區分,來實現各車的坐標發布和跟隨,跟隨效果見圖5.3輛AGV以三角編隊直線行進,領航者在前,跟隨者在兩翼保持編隊以相同的速度前進.當手動將其中一個跟隨者AGV拖離編隊,以改變跟隨者位置時,可見被拖離車輛將加速追趕編隊,最終恢復編隊陣型(見圖6).
當手動將領航者AGV脫離編隊,改變領航者位態時,可見2輛跟隨者AGV加速追趕頭車,并根據頭車位姿旋轉行進角度,最終實現編隊恢復.仿真結果表明,應用“領航者-跟隨者”算法能夠有效避免各車之間發生碰撞,并能夠在編隊受到干擾后進行動態恢復,驗證了算法的可行性和有效性.
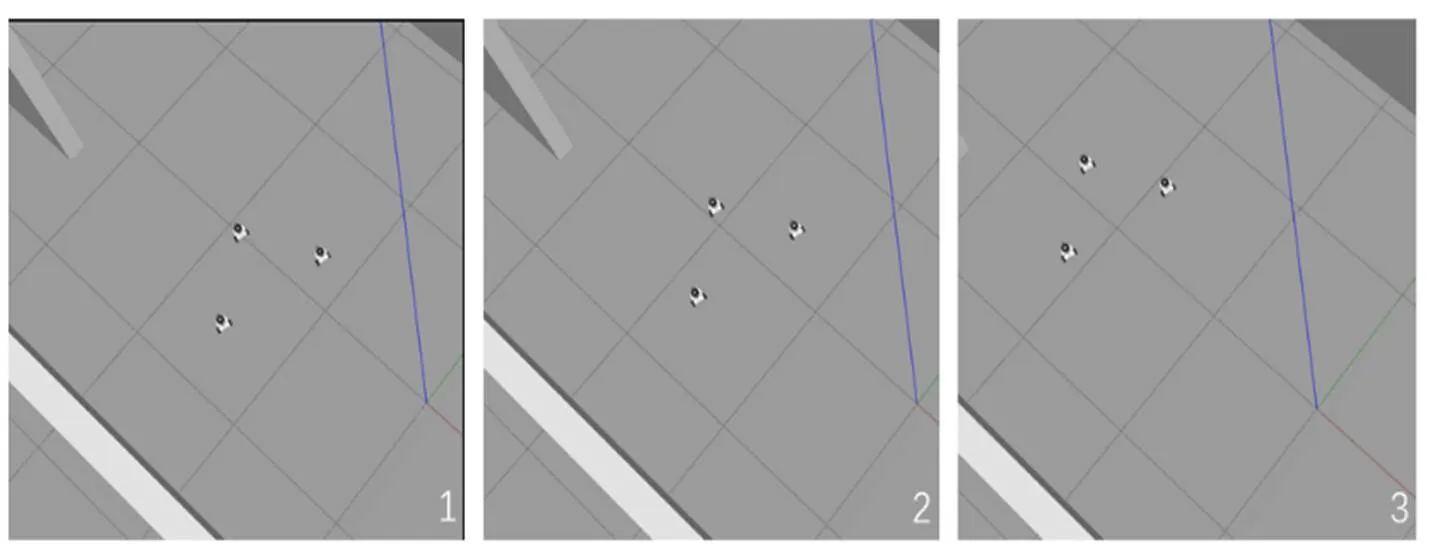
圖5 AGV多車編隊行進效果
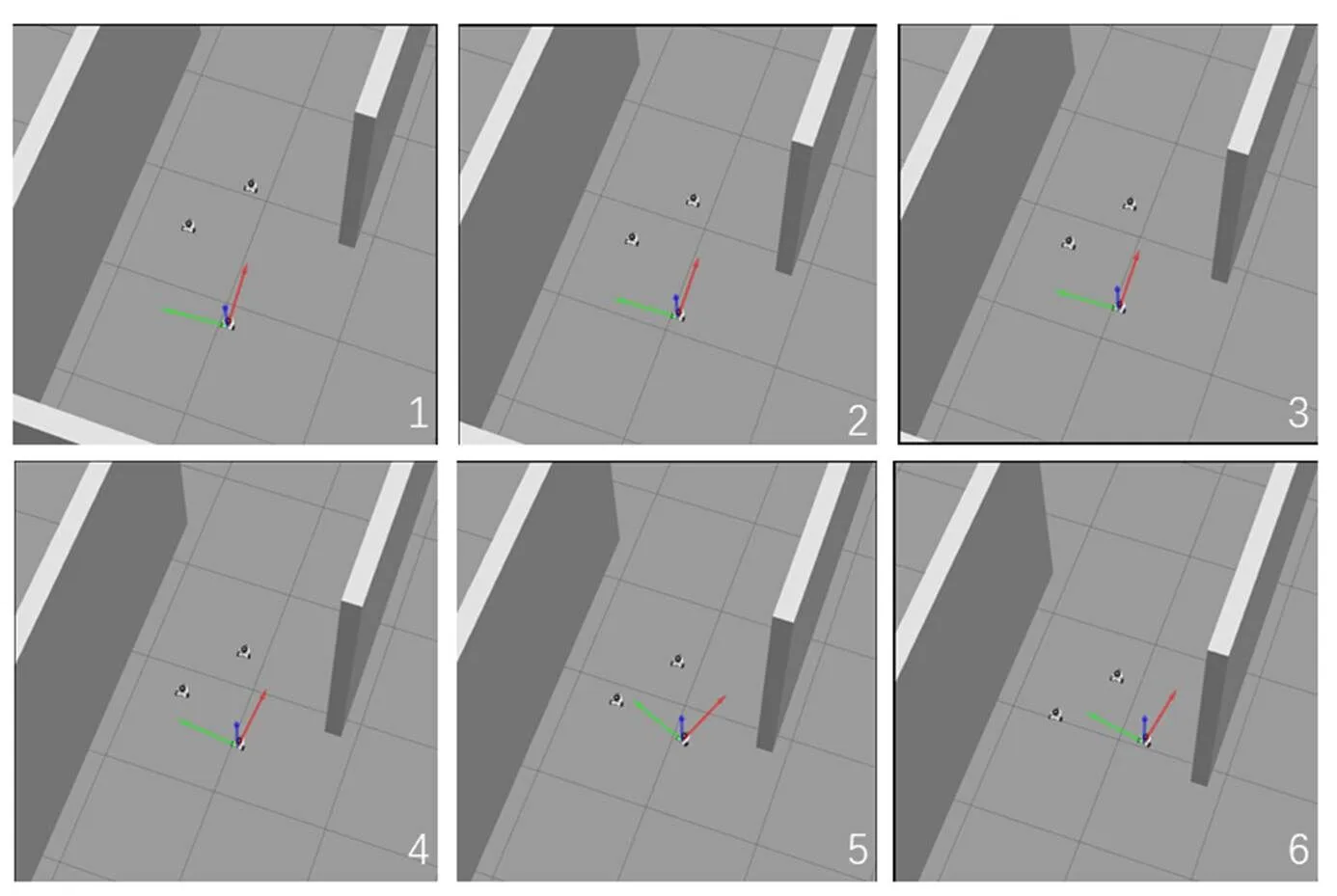
圖6 干擾“跟隨者”位置時編隊的恢復效果
4 教學改革總體評價
通過引入中國工程機器人大賽競賽項目“小型無人分揀控制系統設計”融入教學環節在課程內容體系中,改革后的教學能激發學生的學習興趣,學生可以很好地將理論知識轉化到實際應用場景.例如:數學建模、電機控制、傳感器技術等基礎理論,在程序編制、模型建立、系統分析等方面得到較大提升,提升了學生的理論與設計相結合能力,還有利于提高學生的創新能力,教學改革運行的效果良好.
以競賽為導向,培養了學生工程知識學習、復雜工程設計/開發解決方案的能力,在理論成績方面逐年提升.將教學項目與競賽項目有機融合,為全國大學生機械創新大賽、互聯網+大賽、“挑戰杯”全國大學生課外學術科技競賽、中國工程機器人大賽等各類賽事提供后備人才和鍛煉機會.
綜上所述,本文以小型物流場景下的無人分揀系統AGV平臺為研究對象,對環境建模以及路徑規劃問題進行研究,并在傳統A*算法的基礎上對啟發函數進行動態加權,提高了全局路徑規劃效率,并對規劃路徑進行了平滑性處理.應用基于“領航者-跟隨者”算法的AGV多車路徑規劃算法,實現了AGV多車高效地完成物料搬運任務.以競賽項目為載體的課程教學改革,使學生得到了鍛煉,學會了團隊合作,真正體會了什么是專業知識與實踐設計相結合,拓展了學生實際建模與設計能力,更好地提高學生的創新意識和創新能力.
[1] 杜壯.制造業服務化趨勢明顯機器人從“籠子”作業走向人機共融[J].中國戰略新興產業,2021(10):107-119.
[2] 余娜娜,李鐵克,王柏琳,等.自動化分揀倉庫中多AGV調度與路徑規劃算法[J].計算機集成制造系統,2020,26(1):171-180.
[3] 郭心德,丁宏強.離散制造智能工廠場景的AGV路徑規劃方法[J].廣東工業大學學報,2021,38(6):70-76.
[4] 張國榮,王志亮,趙振棟,等.移動機器人同時定位與建圖研究綜述[J].軟件導刊,2019,18(10):5-7.
[5] 任偉建,高強,康朝海,等.移動機器人同步定位與建圖技術綜述[J].計算機測量與控制,2022,30(2):1-10.
[6] 王春穎,劉平,秦洪政.移動機器人的智能路徑規劃算法綜述[J].傳感器與微系統,2018,37(8):5-8.
[7] 趙鑫.移動機器人路徑規劃算法研究綜述[J].電子元器件與信息技術,2021,5(7):239-240.
[8] 張開樂,陳興文.基于激光SLAM實現AGV自主導航技術的仿真[J].山西電子技術,2021(5):32-34.
Reform of control technology fundamentals course with carrier of competition projects
CAO Zhongliang,CHAO Yuan,DING Li,HUANG Ming,DAN Wentao
(School of Mechanical Engineering,Jiangsu University of Technology,Changzhou 213000,China)
Under the background of engineering certification,in view of the current situation that students in the field of mechanical engineering use theoretical knowledge to solve complex engineering problems,it takes the teaching of the mechanical engineering control course control technology fundamentals as an example to strengthen competition-style or project-based teaching.It is proposed to integrate the student competition project small unmanned sorting control system design into the course experiment teaching reform plan,and take the competition as the orientation to cultivate students′ engineering knowledge and complex engineering design/development solutions.The teaching reform has achieved good results.The reformed teaching can stimulate students′ interest in learning,which not only improves students′ability to combine theory and design,but also helps to improve students′ innovative ability.
control technology foundation;competition project;curriculum reform
1007-9831(2022)11-0091-05
TP13∶G642.0
A
10.3969/j.issn.1007-9831.2022.11.018
2022-05-12
江蘇理工學院教學改革與研究項目(11610112121)
曹忠亮(1983-),男,黑龍江齊齊哈爾人,副教授,博士,從事控制技術、機電一體化研究.E-mail:caoliang-8302@163.com
猜你喜歡
內蒙古教育(2021年20期)2021-03-08 01:09:14
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
電測與儀表(2014年1期)2014-04-04 12:00:32
