花椒懸浮特性分析與收獲機設計
2023-01-14 03:44:36張希峰鞏彬宮玉敏陳金利司愛麗翟鳳起
山東農業大學學報(自然科學版) 2022年6期
關鍵詞:設計
張希峰,鞏彬,宮玉敏,陳金利,司愛麗,翟鳳起
花椒懸浮特性分析與收獲機設計
張希峰1,鞏彬1,宮玉敏1,陳金利1,司愛麗2,翟鳳起2
1. 淄博市農業機械研究所, 山東 淄博 255086 2. 淄博市淄川區農業機械事業服務中心, 山東 淄博 255100
針對目前花椒采摘效率低、收集困難等問題,設計一款高效氣吸式花椒采摘裝置。對花椒物理特性外形尺寸和重量進行測試,計算懸浮速度;用FLUENT仿真模擬花椒粒在不同狀態的直管和彎管中的運動軌跡;設計兩種采摘頭和輕便的背負式負壓收集倉;制作樣機試驗。測試結果得到花椒果實為平均長5.66 mm、寬5.12 mm、厚4.96 mm的橢球形,平均重0.075 g;計算得到懸浮速度11.72 m/s;仿真試驗得到花椒在豎直、向下的管中與管壁摩擦碰撞少,在彎管拐角處易發生碰撞;樣機試驗表明采摘效率大大高于人工,且能同步收集;兩種采摘頭試驗對比,得到最優方案。該方法和設計能夠滿足花椒采摘需要,研究結果可為花椒采摘設備研制與優化提供理論依據。
花椒; 懸浮性; 收獲機
花椒是木本佐料植物,因果簇繞枝條各方向均有分布,且不規律,帶刺且怕傷枝,果皮油囊不耐擠壓而導致機械化采摘十分困難[1,2]。因此,人工采摘仍是當前花椒采收的主要方法。然而,人工采摘易扎手、耗時長、效率低;花椒采摘周期短,成熟椒易脫落等,致使花椒采摘成本居高不下[3-7]。
目前,花椒采摘機械裝置主要主要分3類。第1類:剪切式、鋸形式等小型手持式采收機械,如剪刀、拇指刀、孫老師牌雙刀口、金手指牌鋸齒形等,但不同程度存在采摘率低、收集困難等問題[8-10];第2類:大型采收機械裝置,例如鄭洲洲發明的一種半自動花椒采摘機[11],目前這類設備在試驗研發階段,且存在著體積大、重量大、不靈活等問題;第3類:花椒采摘機器人,例如蘭州理工大學楊萍、劉蒙蒙等研究的花椒采摘機器人[12],這類設備目前依然在實驗研發階段,距離實際使用還有一定的距離,技術還不夠成熟。為此,研發一款具有效率高、損傷小、易于攜帶、采收一體等特點的花椒收獲機具有重要意義。
在利用氣力進行收獲、輸送、清選等方面已經有相關的研究和應用[13]。王學農等對巴旦木殼仁混合物料風選進行了相關研究[14];于福峰、張鳳奎等研究了紅棗的懸浮速度特性及撿拾機設計[15,16];馬秋成等研究了蓮子的空氣動力學特性和殼仁負壓分離技術[17];曹成茂等對山核桃殼仁的風選進行了相關研究和試驗[18];侯華銘等研究了利用氣吹清選糧油作物[19]。利用氣力進行花椒的收集也是一種非常好的方法。
針對目前花椒采摘機械存在的問題,運用氣吸收集技術,設計一款高效氣吸式收獲機:負壓式收集裝置實現采收一體,收集過程無機械擠壓大大減少對花椒的損傷,提高采摘效率的同時保證花椒質量;高效采摘頭對花椒快速采摘;柔性收集管實現采摘頭不同方向的轉換和花椒傳輸,具有高度適應性。
1 花椒果實物理特性測試與關鍵參數計算
1.1 花椒果實物理特性
研究花椒的物理特性,為后續設計、計算提供理論依據。對花椒果實進行試驗測試,測試對象選取處于成熟期的新鮮花椒,分別測試花椒果實的外形尺寸和重量。
測外形尺寸時,隨機選取10粒花椒。經觀察和測量,花椒果實的形狀近似橢球形,分別用游標卡尺測量花椒的長a、寬b和厚c,如圖1。結果記錄如下表1。
分10組進行測量,每組隨機選取30粒新鮮花椒。對每組花椒進行稱重,記錄于表2。
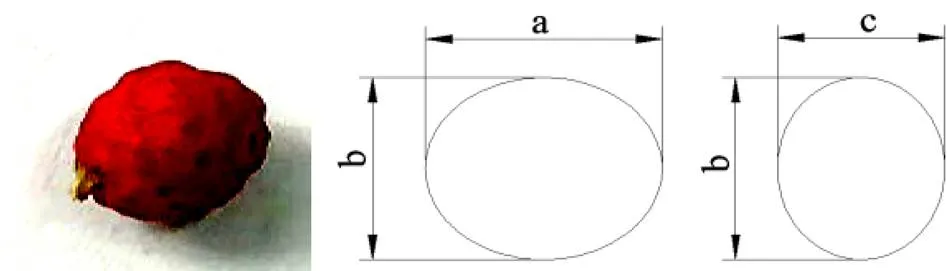
圖 1 花椒果實外形

表 1 花椒果實外形尺寸和重量
根據測量數據得花椒果實的平均長5.66 mm,平均寬5.12 mm,平均厚4.96 mm。根據測量數據得到每粒花椒的平均重量0.075 g。
由花椒果實的重量和外形尺寸計算得到密度=997kg/m3。
1.2 花椒果實懸浮風速計算
1.2.1 花椒果實受力計算豎直管道中,氣流的動力與物料的重力處于同一直線。水平管道中,氣流的動力方向與花椒重力方向垂直,運動狀態更復雜。在計算氣流速度時,一般以豎直管道中的懸浮速度為依據[20]。在豎直管道中,花椒果實受到重力、向上的氣流壓力、空氣浮力1。根據前面測量結果,當花椒果實迎風截面最小時,受到的氣流動力最小。

式中:C-阻力系數,-截面積,-花椒寬,-花椒厚,-氣流流速,-空氣密度。
式中:V-花椒果實體積,-花椒長,-重力加速度。
臨界狀態下,花椒果實懸浮于流場中,受力達到平衡既=1。得到:

1.2.2 阻力系數確定阻力系數Cd的取值根據雷諾系數和顆粒直徑來確定[15,18,21]。
式中:d-花椒果實直徑,取5.5 mm,-流體速度,取12 m/s,-空氣動力粘度,取0.018 mPa?s。計算得到=4437。
得到0.13≤d≤7.15。前面得到花椒果實小徑4.96 mm,大徑5.66 mm。符合Newton區粒徑條件。
根據雷諾系數和粒徑范圍,得到阻力系數為常數,C=0.44。
將速度公式中各參數,氣=1.21 Kg/m3,=5.66 mm,=5.12 mm,=4.96 mm,=0.075 g,=9.8 m/s2,代入公式,得花椒果實理論懸浮風速為=11.72 m/s。
1.3 模擬仿真計算
FLUENT在流體仿真方面具有很大的優勢,能夠大大縮減多次試驗成本,在物料的運輸模擬、烘干模擬、篩選等多方面都可以進行相關的應用[22-24]。為了了解花椒在收集管路中運動狀態,運用FLUENT軟件對花椒在收集管中運動軌跡進行仿真模擬實驗,觀察花椒粒的運動規律。為了更好地在FLUENT中進行仿真,將橢球型花椒粒簡化為等效的球體,簡化原則:重量不變、球體的截面積與橢球型花椒最小迎風截面積相等。得到簡化后等效球體的直徑5.04 mm,密度1119 kg/m3。
設置入口風速12.6 m/s情況下分別對直管和彎管進行豎直、傾斜、水平等狀態下進行仿真,模擬不同狀態不同管路中花椒粒的運動軌跡。通過仿真得到花椒粒的運動軌跡如下。
不同狀態直管中花椒粒的運動軌跡如下圖2。
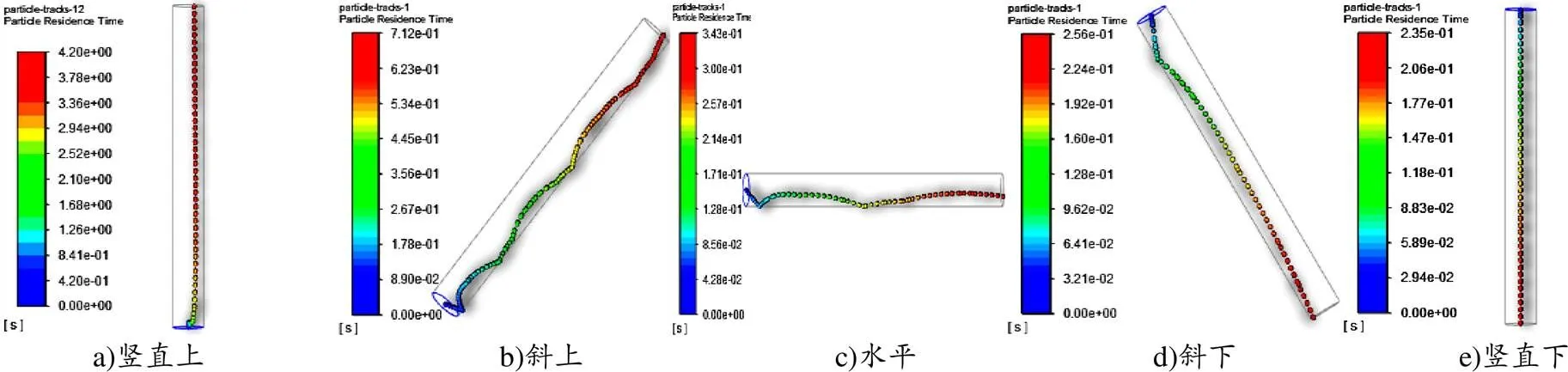
圖 2 直管中運動軌跡
由上述結果得到,豎直向下管道中花椒粒運動最快,最易被收集,斜向下的管道中運動速度次之,在豎直向上管道中花椒粒運動最慢;傾斜管和水平管中花椒和管壁的摩擦碰撞比豎直管要多,傾斜向上管道比水平和斜向下管道碰撞多。
不同狀態彎管中花椒粒的運動軌跡如下圖3。

圖 3 彎管中運動軌跡
由上述結果得到,花椒粒在管道中運動速度與直管中類似,豎直向下部分最快,然后依次斜下、水平、斜上,豎直向上最慢;先向上再向下運動的管內比先向下再向上運動的管內運動更快,更易收集;花椒粒在管道中與管壁的碰撞情況與直管類似;花椒粒在彎管拐角處易與管壁發生碰撞。
綜上,在花椒收獲時盡量減少收集管的拐角,同時盡量使收集管豎直向下或斜向下。
2 結構設計
2.1 工作原理與總體結構
2.1.1 工作原理采摘頭將花椒快速采摘,收集倉中的風機工作使收集倉和收集管內形成負壓氣流將采摘下的花椒吸進收集管,最終到達收集倉內進行收集和存儲,實現花椒快速采收。
2.1.2 總體結構如圖4所示,主要包括:采摘頭總成、負壓收集倉總成、收集管等主要部分。
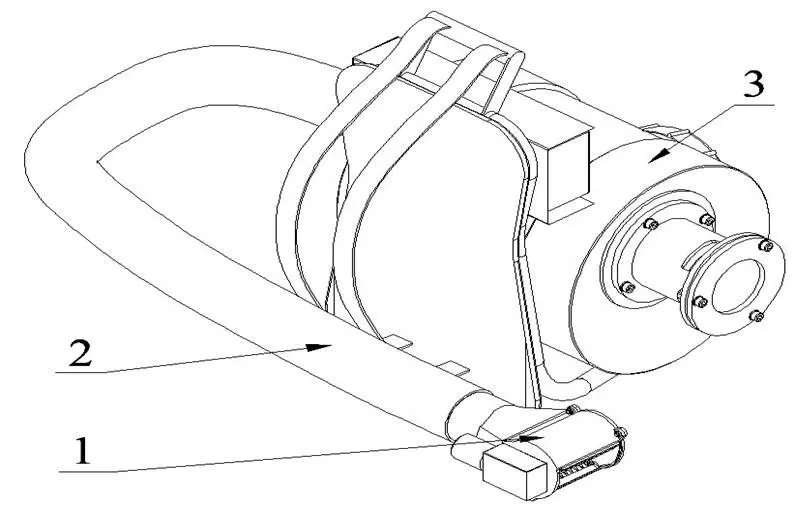
1.采摘頭總成 2.收集管 3.收集倉總成
2.2 收集倉設計
工作原理:風機工作將倉體和管路內空氣帶走,使收集倉、收集管內形成負壓氣流,采摘下來的花椒被收集、儲存到收集倉內,收集倉滿以后,打開卸料口倒出花椒。
收集倉主要由:倉體、背架總成(含軟墊和背帶)、風機總成(包含電機、風機、除塵、密封等)、電池等構成。收集倉的風機入口等各外接口都有密封裝置保正倉體的密封性能。
2.3 收集管選擇
內壁光滑,減少風阻和花椒摩損;軟管,利于采摘頭靈活操作;有足夠抗外壓能力,防止被壓扁;有足夠剛性,確保收集管不會出現對折造成管路堵塞。
2.4 采摘頭設計
設計兩種結構的采摘頭:方案1如圖5、方案2如圖6所示。
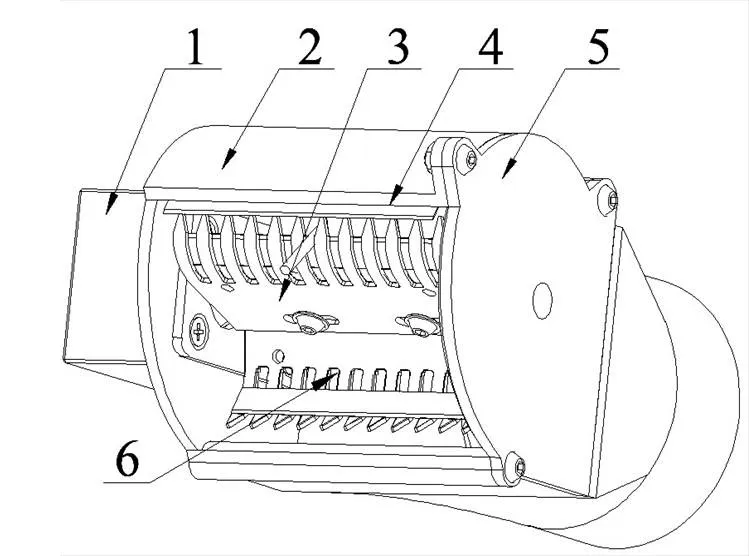
圖 5 方案1
圖 6 方案2
(1)方案1:梳割一體式采摘頭,如圖5,主要由:電機1、本體2、梳割裝置總成3(傳動軸上均布有3組帶氣流通孔的梳齒和刀片)、切割刀片4側蓋5等組成。
工作原理:電機帶動梳割裝置旋轉,花椒在梳割裝置旋轉拉扯下進入采摘頭,在切割和梳刷作用下被采摘。
采摘頭的采摘方式為切割和梳刷。切割:花椒進入采摘頭,梳割裝置上的刀片單獨或與本體上的切割刀片配合對花椒梗切割;梳刷:花椒受到梳齒的拉力,拉斷花椒梗或連接花椒果實的細枝。花椒簇的大小和形狀不盡相同,在采摘時兩種切割動作和梳刷動作配合進行也可能單獨進行。
(2)方案2:旋切式采摘頭,如圖4,主要由本體1、電機2、花椒通道3、動刀4、定刀5、固定塊6等組成。
工作原理:電機帶動動刀高速旋轉,花椒進入采摘頭被高速旋轉的動刀與定刀配合切下。
3 試驗分析
為了驗證設計的合理性,以及測試不同方案采摘頭的采摘效果,根據前面的設計原理和方案,制作試驗樣機并在花椒園實地進行相關試驗,樣機如圖7。
首先,測試整體方案的合理性,操作人員背負試驗樣機,手持采摘頭在花椒園實地進行采摘試驗。其次,根據不同的采摘頭方案,分別進行試驗。如圖8。

圖 7 試驗樣機

圖 8 實地試驗
通過試驗,得到結果如下:
1)收獲機能夠實現花椒快速采摘并同步收集,采收效率大大高于人工。
2)方案1試驗結果如圖9a),能快速采摘;部分花椒成小簇采摘下來,部分花椒為粒狀;只有極少花椒果實掉出,可以忽略。
3)方案2試驗結果如圖9b),能快速采摘;破損量很少;采摘的花椒大多為粒狀;有很小部分花椒從采摘頭飛出未被收集。
圖 9 試驗結果
綜上所述,兩種方案都能實現快速采摘花椒;質量方面:方案1比方案2花椒破損少;收集方面:方案1比方案2掉落未被收集起來的花椒果實少。綜合來看方案1采摘效果最優。
4 結 論
(1)測試研究了花椒果實的物理特性,得到花椒果實為平均長5.66 mm、寬5.12 mm、厚4.96 mm的橢球形,平均重0.075 g。計算花椒懸浮風速11.72 m/s,FLUENT仿真得到運動軌跡顯示花椒粒在豎直、向下的收集管中與管壁摩擦碰撞少,在彎管拐角處易與管壁發生碰撞;
(2)設計了一款能快速采摘,同時運用負壓氣吸實現同步收集的花椒收獲機,包括背負式收集倉,柔性收集管,兩種快速采摘頭。樣機實地試驗,表明氣吸式花椒收獲機設計合理可行,采摘效率大大高于人工,對試驗結果進行分析和對比,得到了效果最優的采摘頭方案;
(3)花椒收獲機的設計,大大減少了人工采摘時間、降低了勞動強度、避免了扎傷等傷害、大大提高生產效率,在社會效益和經濟效益都起到顯著效果;花椒收獲機的研究、設計和試驗,為以后花椒采收設備的進一步深入研究和制作,提供了依據和借鑒。
[1] 黎書文,楊海誠,陸玉雪.基于SolidWorks的手持式花椒采摘器結構設計及運動仿真[J].貴州農機化,2019(4):4-7
[2] 付子桐,嚴文超.基于太陽能電池供電的花椒采摘器的結構設計[J].食品機械,2020,41(6):233-236
[3] 劉安成,尉倩,崔新愛,等.花椒采收現狀及研究進展[J].中國農機化學報,2019,40(3):84-87
[4] 李瑞,武逸凡,李守太,等.基于ANSYS Workbench和ADAMS的振動式花椒采摘機仿真分析及參數優化[J].西南大 學學報(自然科學版),2021,43(12):57-66
[5] 萬芳新.花椒采摘機的設計與試驗[J].安徽農業科學,2014,42(4):1229-1230
[6] 楊萍,郭志成.花椒采摘機器人視覺識別與定位求解[J].河北農業大學學報,2020,43(3):121-129
[7] 馮亞利,彭俊,孫世鵬,等.收獲期花椒的力學特性與形態特征測定與分析[J].農機化研究,2017(7):43-47
[8] 郭文杰,李彥榮,安建軍.手持機械式花椒采摘機的分析探究[J].農機使用與維修,2019(4):5-6
[9] 張文斌.新型梳齒式摘花椒機的設計[J].農機化研究,2015(9):147-150
[10] 王峰.負壓吸收式花椒采摘機設計[J].科技展望,2016(26):136
[11] 鄭洲洲.一種半自動花椒采摘機:中國,201921951763.9[P].2010-07-14
[12] 劉蒙蒙.花椒采摘機器人的機械系統方案設計機器關鍵技術研究[D].蘭州:蘭州理工大學,2019
[13] 溫翔宇,賈洪雷,張勝偉,等.基于EDEM-Fluent耦合的顆粒肥料懸浮速度測定試驗[J].農業機械學報,2020,51(3):69-77
[14] 王學農,邊博,吐魯洪·吐爾迪,等.巴旦木物料殼仁風選裝置試驗及參數優化[J].農業工程學報,2021,37(6):299-306
[15] 于福鋒,李平,張鳳奎,等.紅棗懸浮速度特性試驗測定與分析[J].中國農機化學報,2020,41(6):99-105
[16] 張鳳奎,于福峰,李忠杰,等.氣吸式落地紅棗撿拾機的設計與試驗[J].果樹學報,2019,37(2):278-285
[17] 馬秋成,盧安舸,高連興,等.蓮子物料空氣動力學特性與殼仁分離裝置試驗[J].農業工程學報,2015,31(6):297-303
[18] 曹成茂,羅坤,彭美樂,等.山核桃物料風選機理與風選性能試驗研究[J].農業機械學報,2019,50(9):105-112
[19] 侯華銘,崔清亮,郭玉明,等.氣吹式糧油作物脫出物清選懸浮速度測量裝置設計與試驗[J].農業工程學 報,2018,34(16):43-49
[20] 孫鳴儀.氣吸式紅棗撿拾機的結構參數優化及試驗分析[D].新疆:塔里木大學,2016
[21] 楊倫,謝一華.氣力輸送工程[M].北京:機械工業出版社,2006
[22] 魏新龍,李三平,吳立國,等.基于Fluent的核桃帶式連續烘干機設計[J].食品與機械,2021,37(12):80-88
[23] 戴飛,趙武云,付秋峰,等.雙風道風篩式胡麻脫粒物料分離清選機參數優化與試驗[J].農業機械學 報,2021,52(7):83-92
[24] 張濤,李紅文.管道復雜流場氣固兩相流DPM仿真優化[J].天津大學學報(自然科學與工程技術版),2015,48(1):39-48
Analysis of Suspension Characteristics of Pepper and the Harvester Design
ZHANG Xi-feng1, GONG Bin1, GONG Yu-min1, CHEN Jin-li1, SI Ai-li2, ZHAI Feng-qi2
1.,255086,2.,255100,
Aiming at the problems of low picking efficiency, difficult collection of pepper, an efficient air suction pepper picking device was designed. The physical characteristics of Zanthoxylum bungeanum’s dimensions and weight were tested, and the suspension velocity was calculated. FLUENT was used to simulate the movement trajectories of Zanthoxylum bungeanum in different states of straight pipes and curved pipes. Two kinds of picking heads and light negative pressure collection bin of backpack were designed. A prototype was made and test. The test results show that the Zanthoxylum bungeanum is an ellipsoid with average length of 5.66 mm, width of 5.12 mm, and thickness of 4.96 mm, with an average weight of 0.075 g. The theoretical calculated suspension velocity is 11.72 m/s. The simulation test shows that the Zanthoxylum bungeanum have less friction and collision with the pipe wall in the vertical and downward collecting pipes, and collisions are easy to occur at the corners of the elbows. The prototype test shows that the picking efficiency is much higher than Manual, and can be collected synchronously. Two kinds of picking heads were compared to obtain the optimal solution. The method and design can meet the needs of pepper picking, The research results can provide a theoretical basis for the development and optimization of pepper picking equipment.
Pepper; suspension; harvester
S225.93
A
1000-2324(2022)06-0963-06
2022-03-27
2022-04-15
張希峰(1988-),男,碩士,工程師,主要從事農業裝備研發. E-mail:852213260@qq.com
10.3969/j.issn.1000-2324.2022.06.024
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
