網聯環境下的燃料電池混合動力汽車能量管理
2023-01-21 01:36:52石澤華付主木陶發展司鵬舉朱龍龍
河南科技大學學報(自然科學版) 2023年1期
石澤華,付主木,b,陶發展,b,司鵬舉,b,朱龍龍,b
(河南科技大學 a.信息工程學院;b.河南省機器人與智能系統重點實驗室,河南 洛陽 471023)
0 引言
近年來,隨著汽車保有量的不斷增加,城市交通擁擠、環境污染和能源消耗等問題日益凸顯[1-3],燃料電池混合動力汽車(fuel cell hybrid electric vehicle,FCHEV)以其效率高、零排放等優點逐漸成為綠色交通系統的重要組成部分[4-5]。路況信息和信號燈狀態對車輛的能耗影響較大,隨著車與車(vehicle to vehicle,V2V)通信以及車與交通設施(vehicle to infrastructure,V2I)通信技術的發展,使得車輛行駛過程中獲取前方信息成為可能。如果車輛能夠合理利用車聯網技術(V2V和V2I),則可避免紅燈前頻繁停車,降低能源消耗,保證車輛穩定行駛,提供經濟安全的駕駛環境[6-8]。
文獻[9]針對城市道路條件下的網聯汽車,提出了一種分層控制結構,利用V2V通信獲取鄰近車輛的狀態信息,為其提供最優的目標車速,并采用自適應等效消耗最小策略進行速度跟蹤,但該策略獲取的目標車速是勻速狀態,不能反映實際道路交通情況。為了進一步優化城市交通環境下的目標車速問題,文獻[10]提出了一種在車聯網環境下利用鏈式神經網絡進行速度預測的方法,并設計了一種新的等效因子適應規律,有效提高了目標車輛的燃油經濟性。文獻[11]提出一種雙向長短期記憶序列模式的速度預測算法,并將均方根誤差應用到模型預測控制中作為評價標準,驗證了速度預測的準確性,但該算法設計忽略了車輛在交通路口處的延誤,延長了通行時間。為了提高目標車輛快速通行交叉口的時間,文獻[12]提出一種利用信號燈狀態的經濟駕駛系統,通過采用基于拉格朗日函數的模型預測控制(model predictive control, MPC)方法,有效減少了交叉口不必要的停車次數。文獻[13]在實際交通信息構建的研究場景中,提出了一種利用粒子群優化算法求解非線性約束問題的速度優化策略,可有效縮短停車等待時間。為了進一步提高城市交通路口運行效率,文獻[14]借助車聯網技術建立了車輛通行的引導模型,利用多目標粒子群優化算法降低車輛交叉口通行時間。文獻[15]提出了一種車速優化與交通信號控制的協同方法,同時優化車速軌跡和交通信號配時,最大幅度地提高了車輛的運輸效率和燃油經濟性。
以上優化策略多以降低燃油消耗為目的,應用于傳統燃油汽車,未充分考慮綠色交通系統的發展,而且車輛運行過程中沒有對全路段進行車速規劃,導致通行交叉口時不能同時兼顧能源使用壽命和燃料經濟性,造成信號燈處額外的停車等待時間。基于此,本文以燃料電池混合動力汽車為研究對象[16],通過利用車聯網信息實時獲取信號燈狀態,結合目標車速設計一種分層能量管理策略,實現對FCHEV的實時優化,提高車輛燃料經濟性和續航里程。基于MATLAB/Simulink-Advisor聯合仿真環境和實驗平臺,對本文所提的分層能量管理策略進行仿真分析和實驗驗證。
1 基于交通信息的FCHEV能量分配原理
本文的研究對象是燃料電池混合動力汽車,其拓撲結構如圖1所示。燃料電池作為主能量源對負載提供平滑的功率輸出,并通過單向直流/直流(direct current/direct current, DC/DC)變換器連接到功率總線;而電池和超級電容作為輔助能量源,通過雙向DC/DC變換器與功率總線相連,對負載提供功率緩沖的作用。FCHEV整車結構模型在MATLAB/Simulink-Advisor聯合仿真環境下搭建,并選擇合適的能量源參數以滿足負載需求,具體如仿真部分介紹。
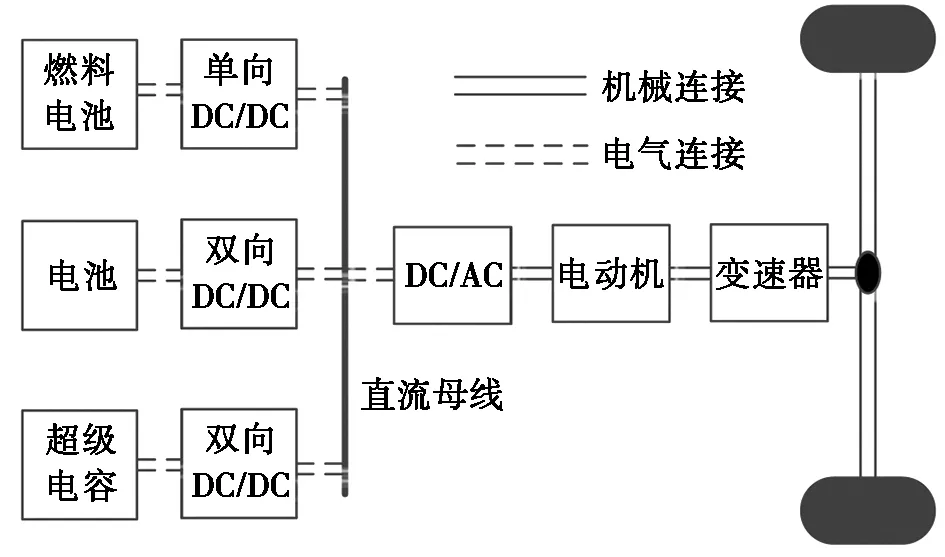
圖1 FCHEV整車拓撲結構圖
本文設計一種基于智能交通信息的分層能量管理策略,其原理如圖2所示。上層控制策略中,利用V2V、V2I技術,建立交通信號燈正時模型,獲取目標車輛的路況信息,采用模型預測控制算法得到車輛的最優目標車速,并將速度信息反饋給駕駛員。下層控制策略中,根據上層信號燈模型求解得到車速,進而可以實時獲取汽車的需求功率,通過優化方法將其合理分配給3種能量源,避免紅燈前的頻繁停車,實現降低燃料消耗、提高能源經濟性的目的。
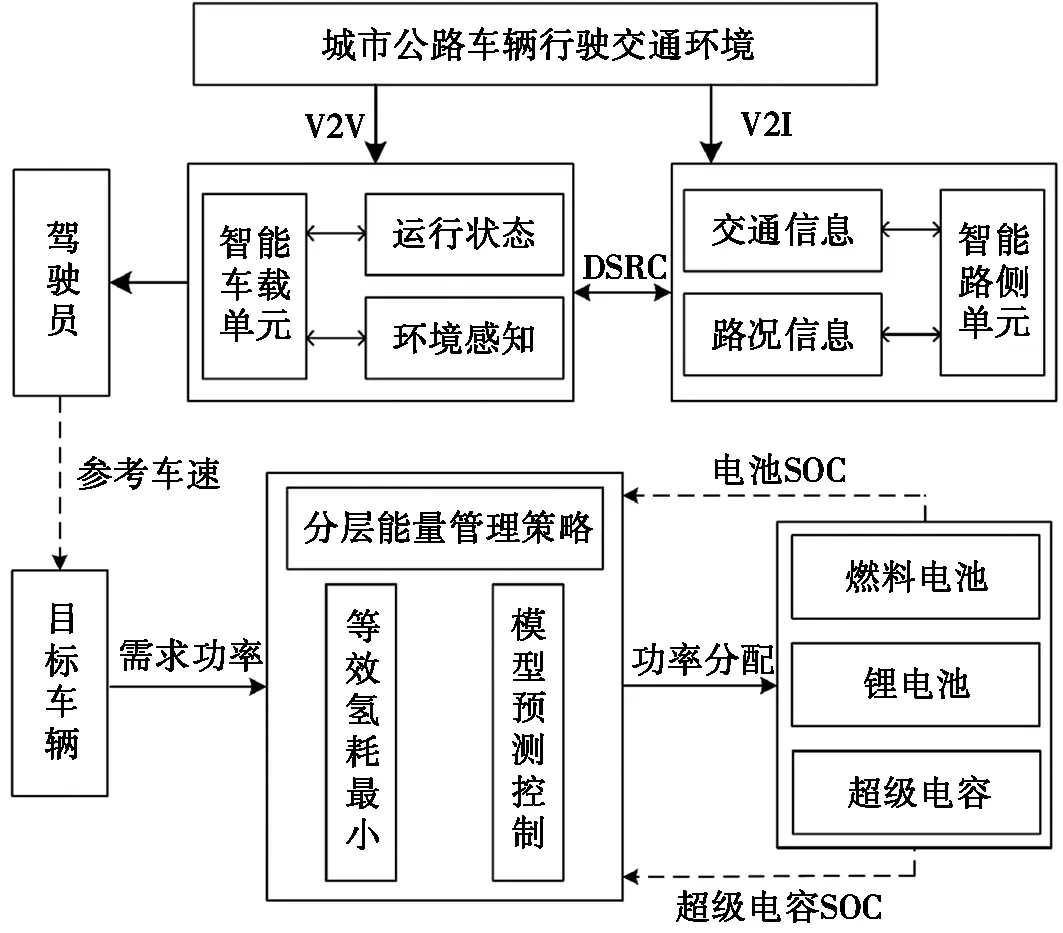
圖2 分層能量管理策略原理圖
2 分層能量管理策略設計
2.1 考慮交通信息的車速規劃
為了便于分析實際交通路況信息,本文選取信號燈為紅和綠兩種狀態,通過模擬真實道路情況,建立交通信號燈正時模型(即交通路口配備無線藍牙傳感器定位技術,能夠同時采集到信號燈信號、相位、定時及探測器數據來量化交通路口的行程時間),合理規劃出最優的目標車速。其目標車速的計算原理如下:
(Ⅰ)當下一個路口是綠燈時,駕駛員可根據車聯網信息進行加速行駛,用以保證在綠燈變紅之前順利通過;或者通過降低車速,在不停車的情況下經過多次信號燈周期的循環,信號燈剛好由紅轉綠時順利到達交通路口。
(Ⅱ)當下一個路口是紅燈時,駕駛員可根據車聯網信息進行合理選擇加減速,用以保證達到交通路口時信號燈剛好由紅變綠;或者經過多次信號燈周期循環之后,在綠燈結束之前順利通過交通路口。
信號燈狀態的判定如下[17]:
(1)
為了便于分析和更好地還原城市道路交通情況,目標車速的上下限為:
(2)
約束條件設置為:
(3)
其中:td為行駛時間,s;tr和tg分別為紅綠燈時長,s;tc為信號燈周期,s;Cn為信號燈循環次數;dl為目標車輛與信號燈之間的距離,m;vobj為最優目標車速,m/s。
從實際角度出發,車輛滿足正常交規行駛,且在城市道路中所允許的車速范圍之內。通過模型預測控制算法實時優化每一時刻的車速,并不斷反饋給駕駛員,使得車輛逐漸接近最優目標車速。目標函數設計如下:
(4)
式(4)化為狀態空間表達式,利用MATLAB仿真軟件中fmincon函數中序列二次規劃求解器,對目標函數非線性規劃問題進行求解,使得目標車輛行駛過程中盡可能跟蹤目標車速,以避免紅燈前頻繁停車。
(5)
輸入變量為車速和加速度所組成的矩陣,約束條件設置為:
(6)
式(4)~式(6)中:k為目標車輛的當前時刻;Np為模型預測控制算法的預測時域;u(t)為車輛加速度(即控制變量);vmin和vmax分別為交通道路條件下所限制的最小速度和最大速度;amin和amax分別為車輛最小加速度和最大加速度。
目標函數為了更好跟蹤目標車速,選取2個權重因子[18],Q1優化的是行車過程中最優車速與基于信號燈狀態獲取的目標車速的差值,保證優化后的車速盡量跟蹤到理想車速,從而減少車輛在城市交通行駛過程中紅燈前停車等待;Q2優化的是車輛加速度,使得車速變化盡量緩慢,減少急加速和急減速,從而提高行車安全性和駕駛舒適性。
2.2 基于目標車速的能量管理策略
本文設計一種基于智能交通信息的分層能量管理策略,上層策略中通過利用車聯網信息并結合模型預測控制算法實時優化目標車速;下層策略中通過將三能量源的能量管理問題轉化為2個層面,采用自適應等效消耗最小策略和模型預測控制算法對每一部分進行分層管理,從而提高控制策略的效率。
首先,將車輛當前規劃的目標速度信息作為整車模型的輸入信號,結合車輛動力學參數求得每一時刻車輛的需求功率[19]:
(7)
其中:Preq為車輛的需求功率;m和v(t)分別為目標車輛的質量和速度;ηmotor為電動機效率;ρ和A分別為空氣密度和迎風面積;CD和μ分別為空氣阻力因數和滾動阻力因數;θ為道路坡度。
其次,在車輛行駛過程中,根據鋰電池和超級電容的所有能量均來自于燃料電池,綜合考慮提升燃料經濟性和降低功率波動對鋰電池使用壽命的影響,采用自適應等效消耗最小策略,建立基于鋰電池和超級電容荷電狀態(state of charge, SOC)值的懲罰函數,自適應優化其放電過程,實現對燃料電池功率的補償。
(8)

同時,根據S0(輔助能量源的充放電效率)設計等效因子k1=S0(1+β+γ)的值,目標函數設計如下[20]:
(9)
其中:LHVH2為氫氣的低熱值;ηfc為燃料電池效率;α為單位時間內平均等效氫消耗與功率的比值,記為燃料電池等效氫耗轉換系數。并將式(9)轉化為一個線性規劃問題,利用優化理論中約束最小化函數求出燃料電池最優輸出功率。
然后,采用模型預測控制方法對鋰電池和超級電容功率進行合理分配,以達到延長鋰電池使用壽命的目的[21]。狀態空間表達式設計如下:
x(k+1)=A·x(k)+Bu·T·u(k)+Bw·T·w(k),
(10)
其中:T為采樣時間;A、Bu和Bw分別為狀態矩陣、輸入矩陣和擾動矩陣;w(k)為擾動矢量,指的是超級電容每一時刻輸出的序列所組成的列向量。
鋰電池和超級電容的SOC為輸入變量,其離散狀態空間表達式如下:
(11)
其中:Ebat和Esc分別為鋰電池和超級電容的最大儲存能量;Pess=Pbat+Psc為輔助能量源的輸出功率。
最后,通過在可設定的預測時域Np內求解下一步的狀態,使得狀態變量的真實值以最快的速度接近參考值,并不斷優化與真實值之間的偏差。
(12)
為了保證控制動作緩和,擴大尋優求解的范圍,在目標函數中引入控制變量約束及松弛因子。
(13)
其中:Xk和W1分別為鋰電池SOC的狀態變量和權重矩陣;W2和W3分別為控制變量及松弛因子的權重系數。
約束條件為:
(14)
針對式(13)和式(14)中的目標函數及約束條件,利用二次規劃算法進行求解,以維持鋰電池SOC的穩定,從而更好地適應需求功率的變化,延長鋰電池的使用壽命,提高續航里程。
3 仿真、試驗及對比分析
3.1 仿真結果
本文控制策略在MATLAB/Simulink-Advisor聯合仿真環境下設計,車輛仿真參數的設定:模擬城市道路通勤情況,由衛星地圖可得某城區一段公交路線上信號燈個數及道路條件,假設目標車輛以20 km/h的初始速度順利通過第1個交通路口,且滿足城市道路交通規則,最高車速和最低車速分別為60 km/h和20 km/h,目標行駛距離為4 km;交通信號燈設置為8個,綠燈、紅燈的持續時間分別為20 s和30 s,仿真迭代步長設置為0.1 s;鋰電池和超級電容初始SOC均為0.7。FCHEV主要仿真參數見表1。
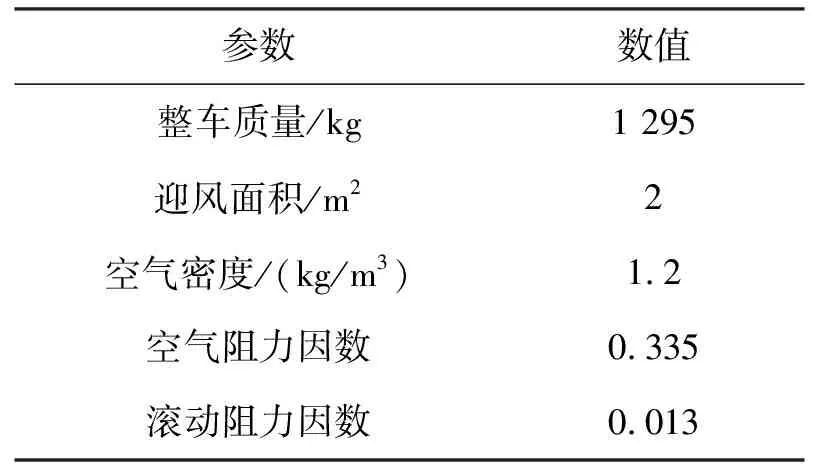
表1 FCHEV主要仿真參數
圖3為城市交通路況下目標車輛模擬仿真分析結果,藍色曲線為汽車的行駛軌跡。由圖3可知:該曲線的斜率任意時間均不為0,表明車輛在每個紅綠燈路口沒有停車等待。因此,目標車輛能夠通過車聯網信息實時獲取信號燈狀態,避開紅燈前的頻繁停車,降低怠速次數。
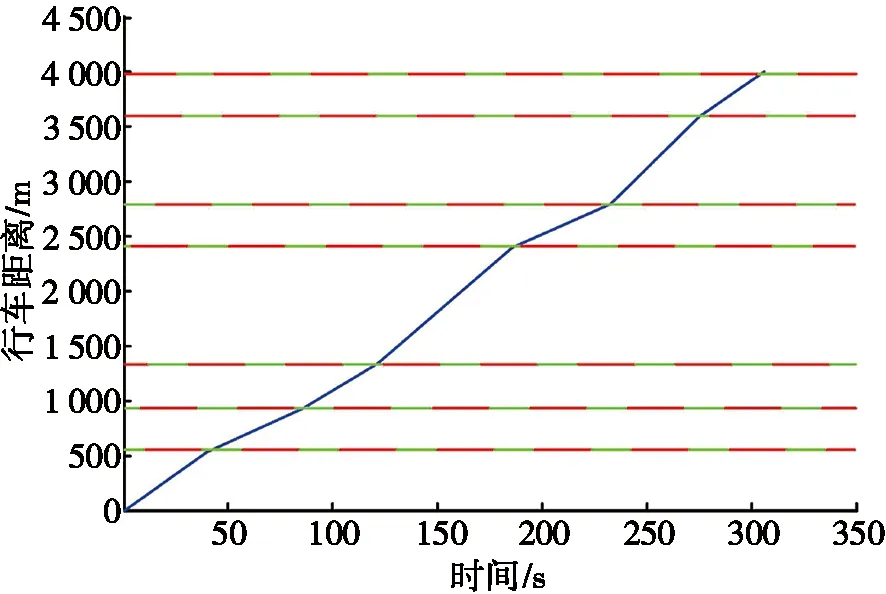
圖3 目標車輛的車速軌跡曲線
圖4為城市交通路況下目標車輛車速預測及速度跟蹤結果,車輛行駛速度隨著與交通路口之間的距離及信號燈相位實時變化,跟蹤誤差在每一時間段內合理變化,實際行駛車速跟蹤效果理想,從而達到避免紅燈前停車、降低能源消耗的目的。
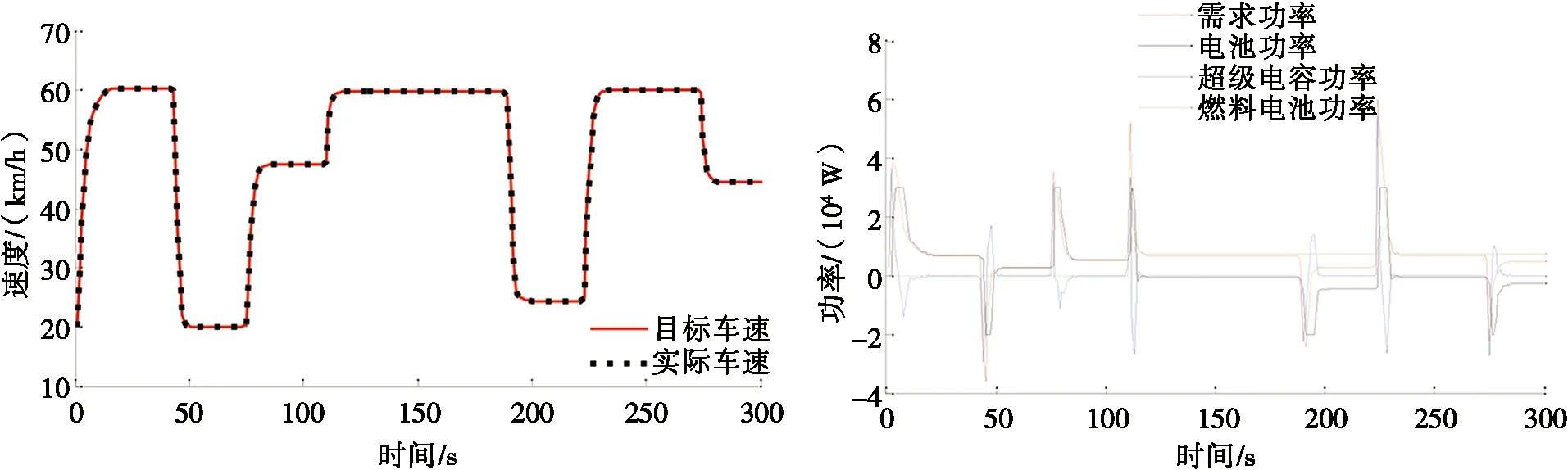
圖4 目標車輛速度規劃曲線 圖5 三能量源功率分配曲線
圖5是3種能量源在城市交通路況下的功率分配情況,本文設計的分層能量管理策略最大化利用每個能量源的優勢,以提高汽車的動力性能。由圖5可以看出:燃料電池的輸出功率較為平緩,承擔絕大部分的負載功率需求;在加速和減速階段,超級電容優先承擔峰值功率和吸收回饋制動能量,鋰電池為超級電容提供功率補償,保證燃料電池工作在高效區域,提高了燃料經濟性,并延長了能源使用壽命。
3.2 試驗驗證
為了進一步驗證所提策略的有效性,通過搭載燃料電池混合動力汽車測試平臺進行實車試驗,平臺結構如圖6所示。該平臺主要包括由燃料電池、鋰電池和超級電容組成的能量源系統,并基于傳統汽車車身,配置車載動力系統、整車控制器、充電/逆變器以及DC/DC變換器系統,具體參數見表2。能量源系統通過控制器局域網絡(controller area network, CAN)總線與控制平臺建立通信連接,駕駛員通過模擬實車駕駛環境,在控制平臺上利用油門和剎車踏板開合度進行信息傳輸(包括電壓、電流、SOC、車速和需求功率等),用來調節DC/DC變換器的占空比,結合所設計的控制策略對3種能量源進行最優功率分配。

圖6 FCHEV試驗平臺
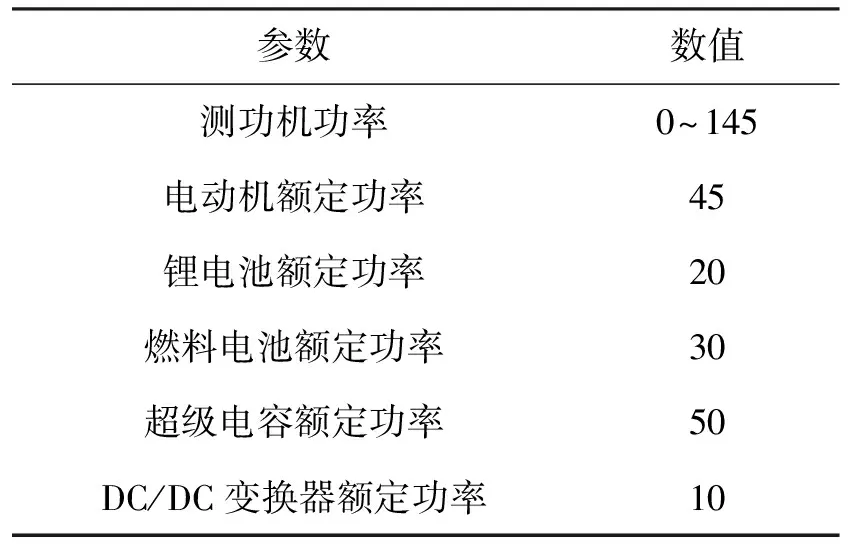
表2 試驗平臺主要參數 kW
為了便于分析問題,更加真實還原實際道路情況,人工模擬5次加減速駕駛通過交通路口(600 s)的情況,試驗車輛的速度及負載需求功率如圖7所示。根據參考目標車速,通過試驗臺架和制動踏板來模擬駕駛員的加減速操作,圖7中負載需求功率出現“尖峰”現象,這是由DC/DC變換器的響應延遲所造成的,而速度曲線的噪聲是手動操作所產生的誤差。
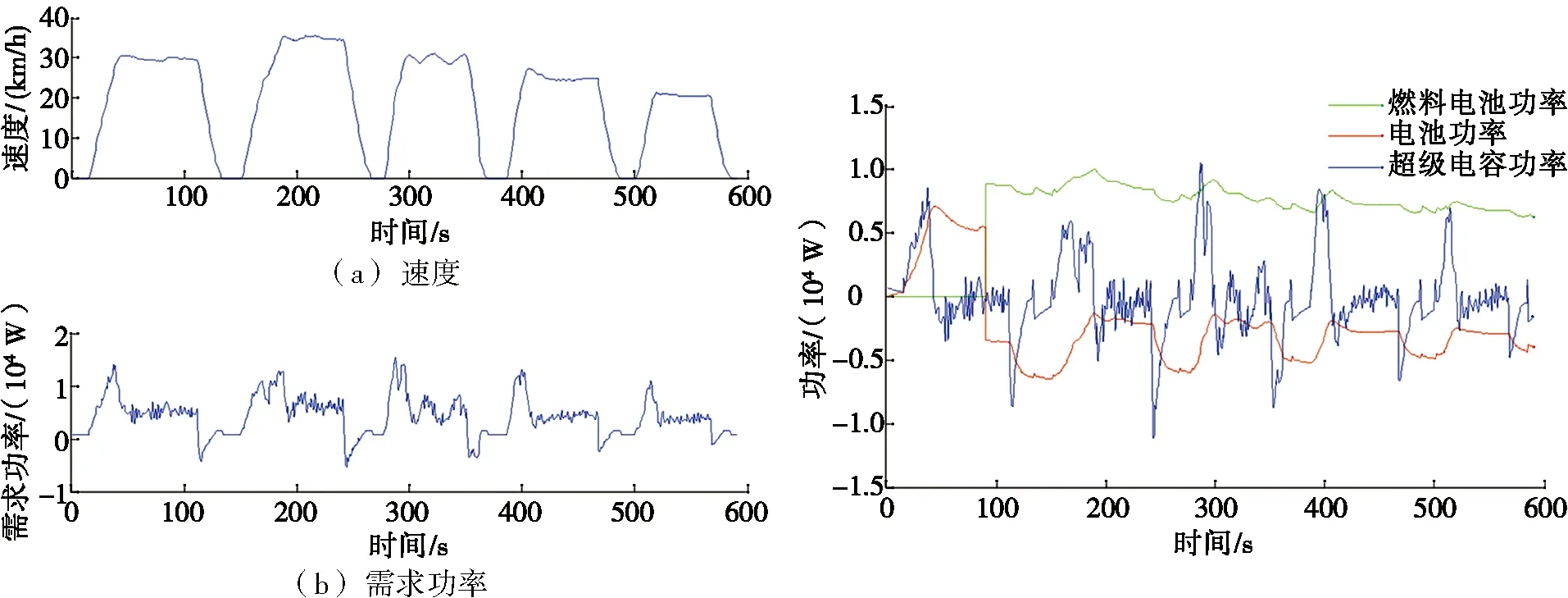
圖7 速度功率曲線 圖8 三能量源輸出功率分配曲線
圖8是試驗過程中3種能量源的輸出功率分配情況。由圖8可以看出:在加速和減速階段,超級電容承擔較大的功率波動,而鋰電池和燃料電池提供平緩的功率輸出,并且兩者輸出功率均維持在10 kW內。然而,由于車輛在試驗過程中受到指令下達延遲、信號采集和開發環境等因素的限制,導致能量源輸出存在遲滯,鋰電池功率波動相比于仿真結果更加劇烈,但是整體控制效果也達到了預期的設計要求。
3.3 對比分析
由試驗結果可以看出,在控制策略的作用下,燃料電池、鋰電池和超級電容的功率分配情況沒有仿真結果“平滑”,試驗中能量源輸出功率出現“尖峰”現象,是由DC/DC變換器的超調和響應延遲所造成的。而且仿真結果是在離線狀態下進行的,能量源轉換效率按照理想狀態進行,忽略了能量傳遞損失,導致等效氫耗的轉換系數明顯增大,出現鋰電池波動劇烈的問題。然而,3種能量源的功率分配情況正如仿真結果所示那樣,車輛加減速行駛過程中,超級電容首先響應負載需求,鋰電池對其進行功率補償,燃料電池功率緩慢上升至穩態,有效減緩了高頻功率對能量源的沖擊并保護其充電過程。雖然試驗結果不如仿真結果理想,但整體上滿足設計的預期要求,驗證了所提出的控制策略對降低能源消耗和提高續航里程的有效性。
本文設計的基于智能交通信息的分層能量管理策略,通過利用車聯網技術可以實時獲取信號燈狀態及車輛運行條件等信息,在城市交通環境下,通過指導經濟車速規劃促進車輛節能及環保駕駛,從而達到避免紅燈前的頻繁停車、延長能源使用壽命的目的。通過在城市工況下對目標車輛進行速度規劃,相比于車輛自由駕駛狀態能更好地適應城市交通環境,仿真策略對比如表3所示。由表3可知:所設計的分層能量管理策略對燃料經濟性和續航里程分別提高了9.83%和5.13%。
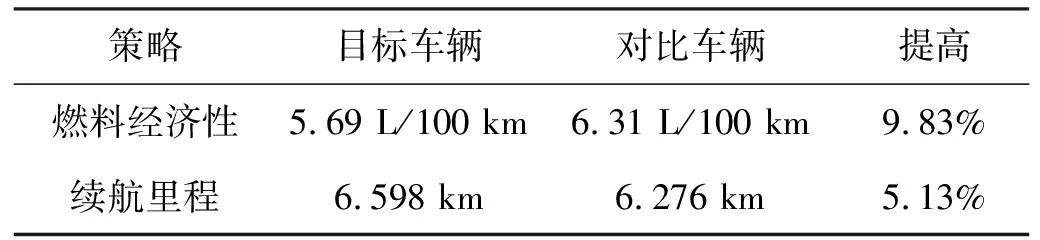
表3 仿真策略對比
4 結束語
本文設計了一種基于智能交通信息的FCHEV分層能量管理策略,上層模擬城市交通路況環境,基于車聯網信息獲取信號燈狀態,對目標車輛進行速度規劃,并利用模型預測控制方法對經濟車速跟蹤,以達到避免紅燈前頻繁停車的目的。下層利用規劃的目標車速獲取負載需求功率,采用自適應等效消耗最小策略和模型預測控制算法,對3種能量源輸出功率進行最優分配,使得燃料經濟性和續航里程分別提高了9.83%和5.13%,實現了FCHEV優良經濟性能。
然而,設計上層目標車速時僅考慮到單一車輛的運行并且忽略了前后車安全跟車距離的情況,因此,復雜多變的交通環境下的能量管理策略將是下一步研究的重點。