非煤礦山井下鏟運機無人駕駛控制系統(tǒng)的研究
2023-01-26 10:11:28田明鑫
機械管理開發(fā) 2022年11期
關鍵詞:環(huán)境
田明鑫
(北方銅業(yè)銅礦峪礦電控部,山西 垣曲 043700)
引言
鏟運機是一種鏟運一體化的機械,在工作時主要依靠人工操作控制液壓鏟斗的動作,滿足物料運輸需求,由于在工作過程中需要同時兼顧運動、鏟斗動作、轉運等,工作流程多、動作復雜,人工操作時注意力需要高度集中,極易產生疲憊,而且井下環(huán)境復雜,給鏟運機的運行和工作效率帶來了較大的影響,因此迫切需要開發(fā)一種新的控制系統(tǒng),以降低人工操作難度和對人工操作的依賴,提高鏟運機在各種工況下運行的穩(wěn)定性和可靠性[1]。
結合無人控制技術和視頻監(jiān)控技術的發(fā)展,本文提出了一種新的鏟運機無人駕駛控制系統(tǒng),通過激光雷達、高清視頻監(jiān)控模式實現對鏟運機周圍工作狀態(tài)的實時檢查,通過車載控制模塊實現對周圍環(huán)境和鏟運機動作流程的分析,初步實現了鏟運機在工作時的無人駕駛控制。根據實際應用表明,新控制系統(tǒng)的調控精度達到了±0.1 m,反應速度約為0.2 s,極大地提升了鏟運機的運行可靠性。
1 鏟運機無人駕駛系統(tǒng)
鏟運機無人駕駛的核心是鏟運機能夠自主地感知周圍環(huán)境,并對周圍環(huán)境狀態(tài)進行自主識別和判斷,自主進行路徑規(guī)劃和工作狀態(tài)調整。在對多種控制方案進行研究后,本文提出了一種新的鏟運機無人駕駛系統(tǒng),其整體結構如圖1 所示[2]。
由圖1 可知,為了滿足無人駕駛的控制需求,在鏟運機上增加了多種傳感器和中控系統(tǒng),在工作時利用前后側的激光掃描儀和攝像頭對鏟運機周圍的工作環(huán)境進行檢查,將環(huán)境信息傳遞到中控箱內,數據在中控箱內完成分析并確定對鏟運機的調節(jié)需求,輸出調節(jié)控制信息,控制鏟運機的行駛系統(tǒng)和鏟運機構進行工作,滿足無人駕駛控制需求。同時為了提高對鏟運機工作狀態(tài)的監(jiān)測,在鏟運機上還設置了車載無線通信系統(tǒng),能夠將鏟運機的運行信息實時傳遞到監(jiān)控中心,監(jiān)控中心人員也能夠通過無線數據傳輸系統(tǒng)進行遠程控制,確保鏟運機在緊急情況下人工遠程控制的需求。

圖1 鏟運機無人駕駛控制系統(tǒng)示意圖
2 各控制模塊分析
鏟運機無人駕駛控制系統(tǒng)主要包括車載控制模塊、環(huán)境狀態(tài)感知模塊、狀態(tài)監(jiān)測模塊及無線數據信息模塊四個部分,各個模塊協(xié)同作業(yè),共同確保了鏟運機無人控制系統(tǒng)的運行穩(wěn)定性和可靠性。具體介紹如下:
1)車載控制模塊。該模塊是整個無人駕駛控制系統(tǒng)的核心,對數據處理要求極高,因此采用了高性能的嵌入式控制系統(tǒng)[3],在工作時首先獲取各類傳感器的數據信息,對各種指令和傳感器監(jiān)測數據進行分析后,由控制系統(tǒng)輸出相應的控制量。控制量作用于鏟運機的液壓控制系統(tǒng)和驅動系統(tǒng),實現對鏟運機運行狀態(tài)的靈活調整。車載控制模塊還能夠將鏟運機的狀態(tài)信息通過無線數據通信系統(tǒng)傳輸給監(jiān)控平臺,滿足遠程監(jiān)測的需求,同時該模塊能夠對地面監(jiān)控中心的數據指令進行解析,實現遠程調控。
2)環(huán)境狀態(tài)感知模塊。環(huán)境感知模塊是該無人駕駛控制系統(tǒng)的“眼睛”,主要用于對鏟運機周圍的環(huán)境進行監(jiān)測,為鏟運機路徑規(guī)劃的動作執(zhí)行提供依據。為了滿足不同工況下環(huán)境感知可靠性的需求,在鏟運機的前后設置了激光雷達+高清視頻攝像裝置,高清攝像裝置還具有夜視功能,滿足在暗夜環(huán)境下的環(huán)境監(jiān)測需求[4]。激光雷達對環(huán)境的感知,主要是通過利用激光束進行測距來實現的,在激光雷達中包括了一個激光發(fā)射裝置和一個激光接收裝置,通過發(fā)射裝置發(fā)出激光束,激光束在遇到障礙物后會進行反射,激光接收裝置接收到被反射回來的激光束后對激光信息進行解讀,進而測算出障礙物的距離。激光雷達監(jiān)測具有受環(huán)境影響小、測量精度高、穩(wěn)定性好的優(yōu)點[5]。鏟運機環(huán)境感知模塊安裝結構如圖2 所示。
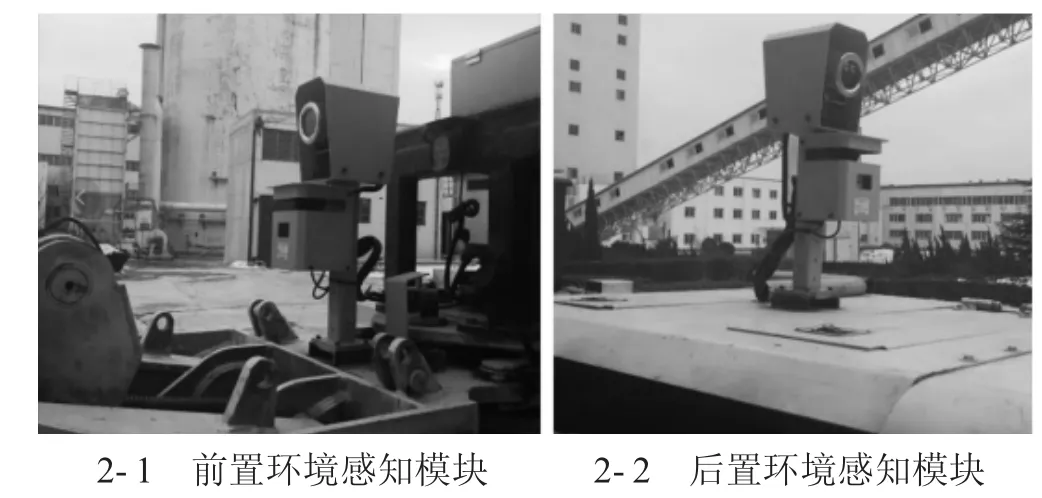
圖2 環(huán)境感知模塊安裝結構示意圖
4)狀態(tài)監(jiān)測模塊。狀態(tài)監(jiān)測模塊主要包括各類角度傳感器、速度傳感器、溫度傳感器等,主要是對鏟運機的運行狀態(tài)進行實時監(jiān)測,一方面對車載控制模塊發(fā)出調控信息后的執(zhí)行情況進行反饋,另一方面對鏟運機的工作狀態(tài)進行監(jiān)測,出現故障后及時報警和定位,提高鏟運機在運行中的穩(wěn)定性和可靠性。角度傳感器主要安裝在鏟運機鏟斗液壓油缸處,速度傳感器主要安裝在鏟運機的驅動軸上,溫度傳感器主要安裝在鏟運機的驅動電機位置,各類傳感器的安裝如圖3所示。

圖3 狀態(tài)監(jiān)測模塊安裝結構示意圖
5)網絡通信模塊。為了滿足鏟運機運動過程中通信可靠性的需求,網絡通信方面,本文選擇了一種新的無線數據傳輸系統(tǒng),在鏟運機和其工作環(huán)境周圍設置了無線基站,使無線數據能夠覆蓋整個鏟運機的工作場所,確保數據通信的效率和準確性。
3 自主控制路徑規(guī)劃
由于井下環(huán)境復雜,為了滿足鏟運機在不同工況下主控制的需求,在對多種控制方案進行分析后,最終確定了一種基于模糊PID 的自主控制路徑規(guī)劃方案,在系統(tǒng)內增加了一個權重輸出器。參考人工駕駛需求,當鏟運機在中央行駛時,此時會考慮到各類偏差對行車安全的影響,而當鏟運機偏離正常道路的距離不大時,系統(tǒng)則考慮偏離角對運行安全的影響。因此按照以上邏輯處理規(guī)則來對鏟運機的運行路徑進行規(guī)劃,提高規(guī)劃效率和安全性。
4 應用情況分析
目前該無人駕駛控制系統(tǒng)已經在鏟運機上投入應用,以UL70 鏟運機為例,在運行過程中的路徑控制精度達到了±0.1 m,從下達調控指令,到系統(tǒng)作出反應的時間間隔約為0.2 s,完全滿足了自主運行控制穩(wěn)定性和可靠性的需求。其無人駕駛控制界面如圖4所示。

圖4 鏟運機無人駕駛控制界面示意圖
5 結論
1)鏟運機無人駕駛控制系統(tǒng)主要包括車載控制模塊、環(huán)境狀態(tài)感知模塊、狀態(tài)監(jiān)測模塊及無線數據信息模塊四個部分。
2)車載控制模塊,采用了高性能的嵌入式控制系統(tǒng),對數據處理速度快、準確性高;環(huán)境感知模塊,采用了激光雷達+高清視頻攝像裝置,滿足在不同環(huán)境下的環(huán)境監(jiān)測需求;狀態(tài)監(jiān)測模塊通過利用各類傳感器對鏟運機的運行狀態(tài)進行監(jiān)測;網絡通信模塊,通過無線數據傳輸方案,滿足數據傳輸需求。
3)新控制系統(tǒng)的調控精度達到了±0.1 m,反應速度約為0.2 s,滿足無人駕駛控制的控制精確性要求。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38