基于改進型自抗擾控制的永磁同步電機伺服控制
2023-02-03 05:50:50金愛娟丁哲琪李少龍張豪姜驍恩
包裝工程 2023年1期
關鍵詞:實驗
金愛娟,丁哲琪,李少龍,張豪,姜驍恩
基于改進型自抗擾控制的永磁同步電機伺服控制
金愛娟,丁哲琪,李少龍,張豪,姜驍恩
(上海理工大學,上海 200093)
解決傳統包裝機械存在的包裝速度慢、包裝質量堪憂等問題,滿足包裝機械的高效率、高精度等要求,提高食品包裝的自動化水平和包裝企業的經濟效益。對具有較大潛力的永磁同步電機,進行控制器和控制方法的研究與改進,并最終選定自抗擾控制器,對自抗擾控制器中非光滑函數fal進行改進得到連續平滑的tal函數,使其減小在原點周圍的顫振,并且基于tal函數重新設計非線性狀態誤差反饋率和擴張狀態觀測器,以取得對永磁同步電機更好的控制效果。仿真表明,tal函數比fal函數具有更好的平滑性和連續性。基于改進型自抗擾控制的永磁同步電機具有更好的動態性能、穩態精度、抗擾能力和跟蹤能力。文中優化后的永磁同步電機伺服控制系統,適用于高精度、負載變動頻繁的場合,能夠有效地提高包裝自動化水平,滿足高效率、高精度的包裝行業要求。
包裝機械;永磁同步電機;自抗擾控制;非線性函數
隨著工業的快速發展,人工成本也越來越高,包裝行業通過不斷引進全自動化生產線來替代人工,從而降低企業成本[1]。為了提高食品包裝的自動化水平,需要對控制器、控制方法、傳感器和驅動方法進行全面的研究,根據當前的技術發展水平,對食品包裝機械自動化的發展方向進行探討和分析,通過這樣食品包裝機械的自動化水平才能真正的提高,保證食品包裝機械運行的可靠性和穩定性,提高食品包裝機械企業的經濟效益[2]。目前,食品行業對包裝機械的要求主要是生產效率性、靈活性、穩定性、可靠性和環保性。在自動化包裝流水線中,永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)具有較大的潛力,成為了高精度、高效率傳動裝置的主驅動電機。永磁同步電機具有體積小、效率高、功率密度高等優點,被廣泛應用于在包裝機械、數控機床以及飛行器等高性能、高精度伺服驅動場合[3-4]。
一個好的控制方式往往能決定永磁同步電機的性能,目前比較常見的控制方式有比例–積分–微分控制(Proportion Integration Differentiation,PID)、自適應控制、滑膜控制、反步法控制、自抗擾控制等[5-6]。在實際電機控制系統中,PID控制器仍然占主要地位,但是“基于誤差反饋消除誤差”的機理,存在著快速性和超調之間的矛盾。此外,PID控制的抗干擾能力、跟蹤性能也較弱[7]。
針對PID控制器的不足,中科院韓京清教授[8]于1998年提出了自抗擾控制(Active Disturbance Rejection Control,ADRC)。ADRC將所有的不確定性和非線性,包括參數變化、未建模動態、外部未知干擾等,統稱為總擾動,并由擴張觀測器來估計并給予補償,因此在自抗擾控制器框架下,精確模型是不必要的,控制器本身具有較強的抗干擾能力和魯棒性。近年來,國內外一些學者研究了自抗擾控制器的性能,比如絕對穩定性證明[9]。陳志旺等[10]對擴張狀態觀測器的收斂性進行了分析,并將ADRC技術運用到了四旋翼姿態控制中來。Castaneda等[11]利用ADRC解決了機器人在不確定動力學模型下的軌跡跟蹤問題。王怡怡等[12]利用擴張狀態觀測器和非線性反饋控制律,提高控制品質,實現了無人直升機在受噪聲干擾下的穩定性和高控制精度。這些研究都是基于原有的非線性函數fal進行設計的,但fal函數在分段點處不光滑,容易產生高頻顫振。很多學者針對這一問題提出了一系列的解決方案,周濤[13]用反雙曲正弦函數來替代fal函數,能較好地抑制微分峰值;楊淑英等[14]設計了一種增益連續非線性校正函數fac,該函數具有統一的表達式,不存在分段點,使擴張狀態觀測器具有較強的參數魯棒性;蒲明等[15]對fal函數進行了改進并重新設計了3種擴張狀態觀測器,有效地減小了被控狀態的總誤差。
受上述研究啟發,為使PMSM具有更好的動態特性、抗擾能力和跟蹤能力,更好地滿足包裝機械高效率、高穩定性和高精度等要求。文中提出一種改進型自抗擾控制的方法,構建新的非線性函數tal。在原有fal函數的基礎上,基于等價無窮小的概念,用三角函數和多項式擬合,解決分段點處不光滑的問題,減小原點附近的高頻顫振;此外,為使自抗擾控制更加符合“小誤差大增益,大誤差小增益”特性,在誤差較大時進行了再次改進,提高系統的抗干擾能力。
1 永磁同步電機數學模型
文中研究對象是表貼式永磁同步電動機,數學模型包括電壓方程、磁鏈方程、電磁轉矩方程和機械方程[16]。在–同步旋轉坐標系下的數學模型為:
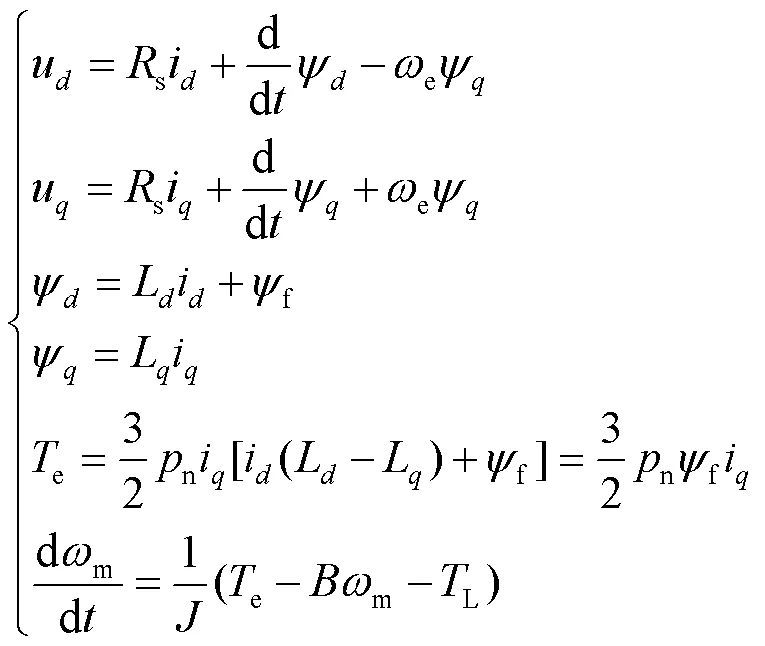
式中:u、i、u、i分別為–軸的電壓和電流;s為定子電阻;L、L為–軸的電感分量;e為電角速度;f為機械角速度;ψ、ψ為定子磁鏈的–軸分量;f為永磁體磁鏈;n為極對數;為轉子的轉動慣量;為阻尼系數;e為電磁轉矩;L為負載轉矩。
2 改進型自抗擾控制器設計
自抗擾技術是一種不依賴系統模型特征,主動對系統進行擾動抑制的先進控制技術。自抗擾控制器主要由跟蹤–微分器(Tracking Differentiator, TD)、擴張狀態觀測器(Extended Stata Observer, ESO)以及非線性狀態誤差反饋控制律(Nonlinear Stata Error Feedback, NLSEF)[17]3部分構成,其基本結構見圖1。
2.1 自抗擾控制器結構
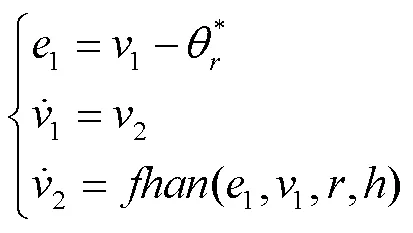
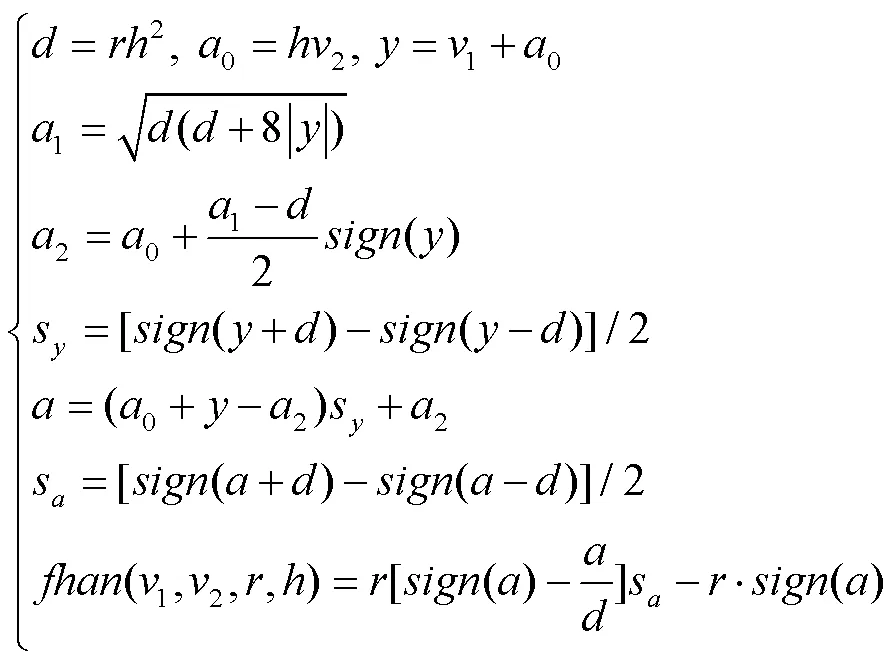
1)跟蹤–微分器(TD)。經典微分器對噪聲具有放大效應,TD能有效地減弱噪聲的放大效應,較好地解決從伴隨著噪聲的量測信號中提取信號和信號的微分。同時,TD給系統輸入安排了過渡過程,擴大比例因子和微分因子的選取范圍[18],縮小零初始條件下的誤差,提高系統的響應時間。TD表達式為:
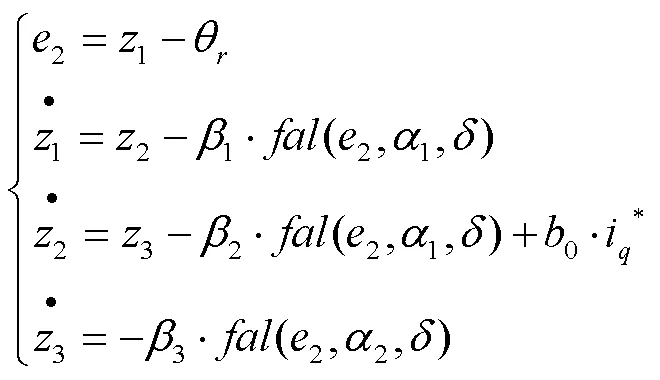
2)擴張狀態觀測器(ESO)。ESO是自抗擾控制器中最核心的組成部分,其作用是解決主動抗擾中擾動觀測這一問題。其本質是將所有不確定、非線性的擾動確定化、線性化,擴展為一個新的狀態變量,使系統轉化為簡單的“積分串聯型”,再利用ESO進行實時觀測并補償抵消,以此提升系統的性能。ESO不依賴于所生成的擾動模型,也不需要直接量測來觀測擾動并獲得估計值,其表達式為:
3)非線性狀態誤差反饋控制率(NLSEF)。NLSEF是基于TD和ESO狀態變量估計之間的誤差非線性算法控制器。ESO和NLSEF總擾動的補償量構成了系統的控制量,提高了系統控制性能,也實現了動態補償,其表達式為:
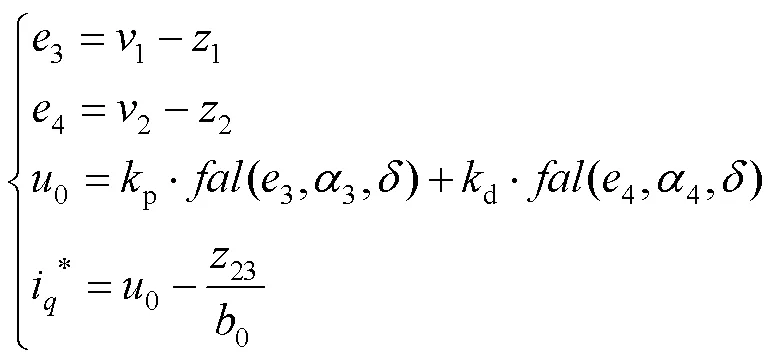
式中:p、d分別為誤差的比例因子和微分因子。
2.2 改進型ESO設計
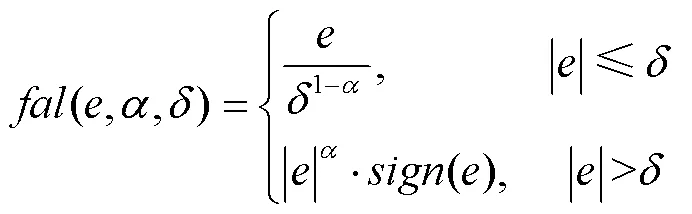
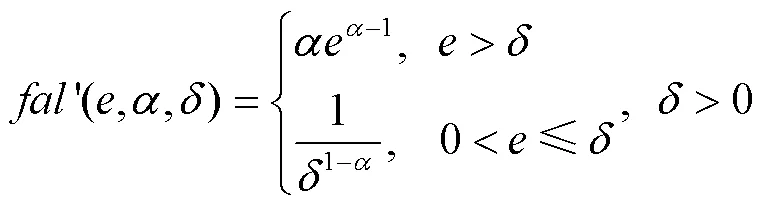
ESO的核心部分是非線性函數。目前,傳統ADRC中的非線性函數是fal函數,由式(5)、式(7)和式(8)可知,fal函數連續,但在分段點?和處存在不可導情況,缺乏光滑性和連續性。在實際系統中,若取值過小,在原點附近容易產生顫振,降低系統的魯棒性。
為了上述解決問題,需要在fal函數的基礎上設計一個連續光滑的非線性函數tal函數,從而提高擴張觀測器的性能。


基于等價無窮小的概念,選用三角函數擬合而非指數函數多項式擬合,是因為sin、sin2以及sin3比指數函數在原點附近的平滑性更好。

為了滿足分段函數在定義域內連續,分段點處可導的條件,則式(12)成立。
求解可得:

那么,最后完整的tal函數形式如下:

為了驗證非線性函數fal函數和tal函數的性能,取=0.25、=0.25、=1進行Matlab仿真實驗。tal函數與fal函數的特性曲線見圖2;tal函數與fal函數的誤差增益曲線見圖3。
圖2 函數特性曲線
Fig.2 Function characteristic curve
由圖2可以看出,fal函數在分段點處有明顯的轉折,而tal函數在原點周圍具有更好的連續性和平滑性;由圖3可以看到,當輸出誤差趨近于0時,tal函數的輸出增益明顯大于fal函數,而當輸出誤差較大時,tal函數的輸出增益則略小于fal函數。由此,可以得出以下幾點結論。
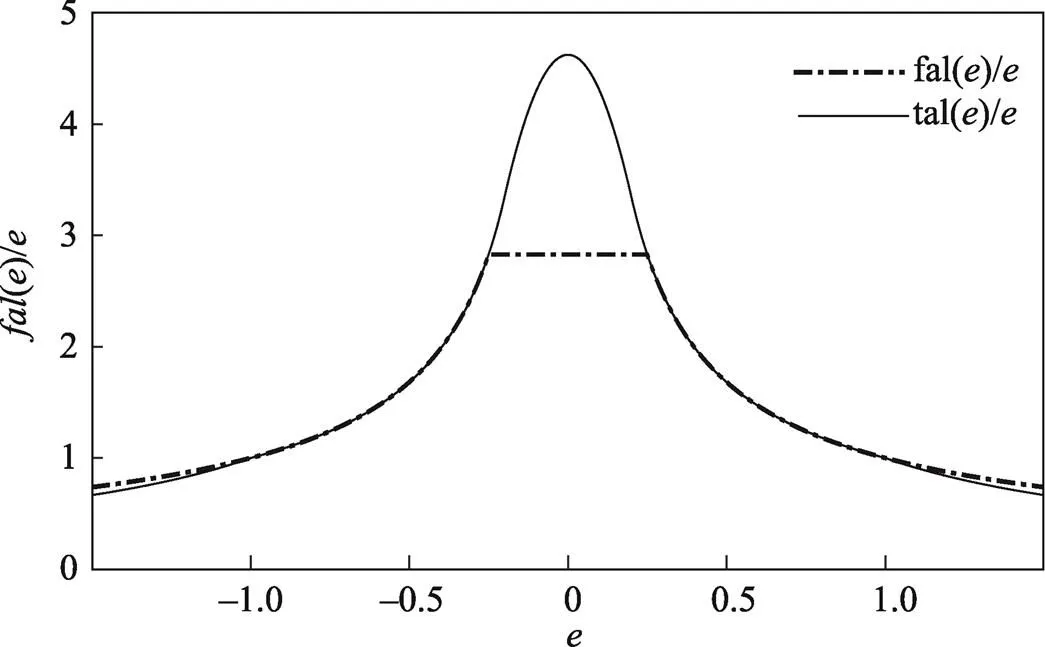
圖3 誤差增益曲線
1)與fal函數相比,tal函數能有效地減小在原點周圍存在的高頻顫振。
2)tal函數更能體現“小誤差大增益,大誤差小增益”的機理。誤差較小時采用大增益,增加系統的快速性;誤差較大時采用小增益,減小超調,調和了快速性和超調的矛盾。
3)基于tal函數的改進型ESO在跟蹤系統狀態1、2、3時不會存在較大的偏離,提高了觀測器的精度,也提高了系統的抗干擾能力。
2.3 改進型ESO的收斂條件
用tal函數代替fal函數,得到的改進型ESO表達式為:
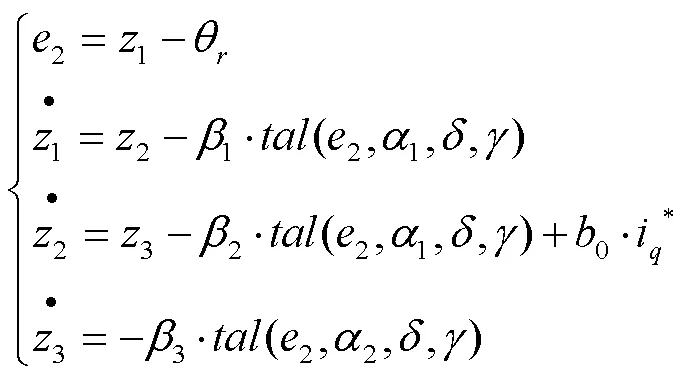
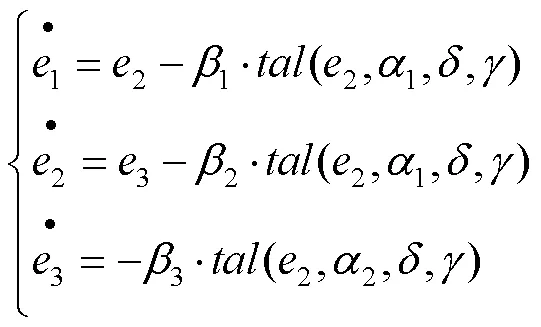
式(17)可以寫成:
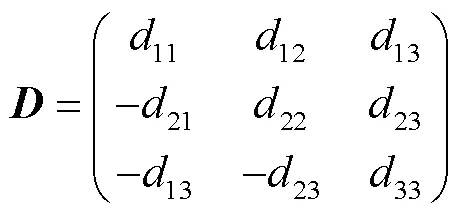
其中:

引理1[20]:若存在矩陣
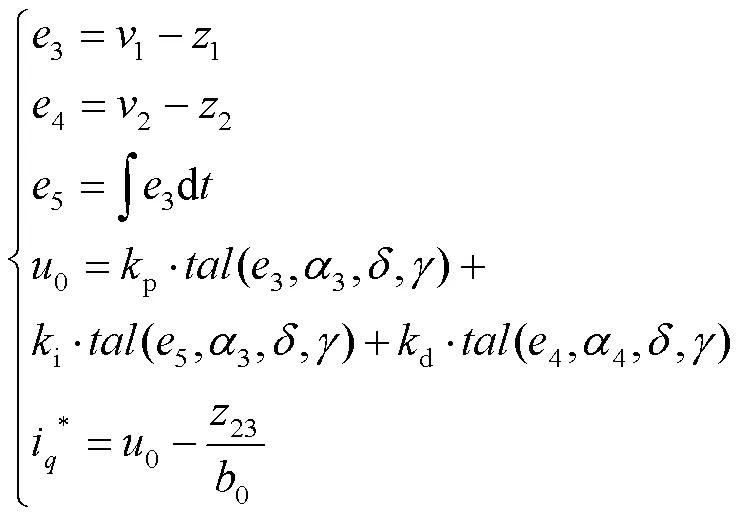
2.4 改進型NLSEF設計
NLSEF類似于傳統的PID控制器,又不同于PID控制器,傳統PID控制器是采用線性疊加的方式來處理誤差,而NLSEF是對誤差進行非線性計算。改進型NLSEF將引入積分因子和誤差的積分,對通過TD轉換得到的誤差、誤差的積分和誤差的微分進行非線性計算,消除穩態誤差,進一步提高系統的控制精度,增強系統的魯棒性。改進型NLSEF表達式見式(21)。
3 仿真實驗與分析
相較于典型的分布式位置伺服控制系統,位置環、轉速環、電流環的三環設計模式,文中將轉速環、位置環合并在一起,構成轉速位置環,并采用改進型ADRC進行控制,電流環則依舊采用傳統PID作為控制方式。具體的改進型ADRC的PMSM伺服系統控制框圖見圖4。
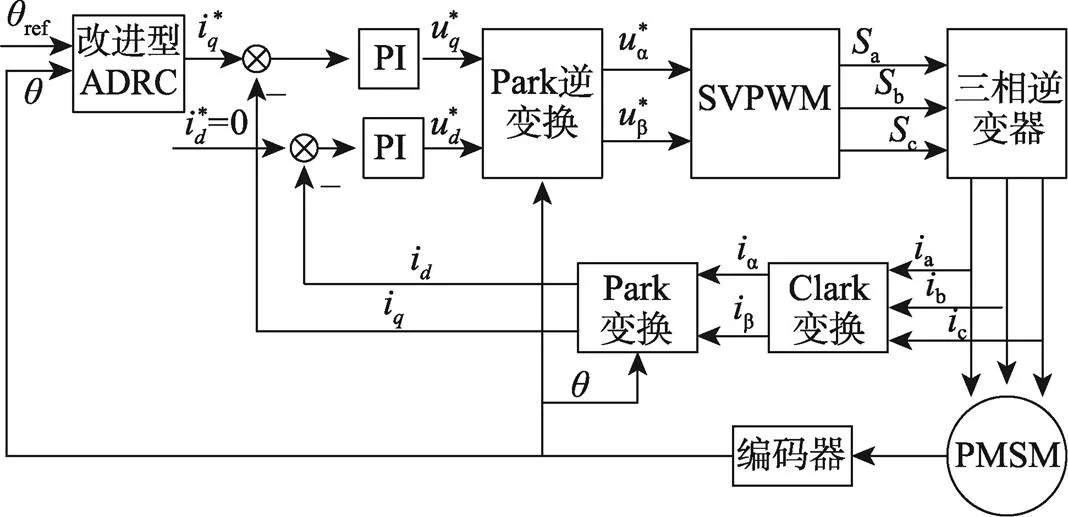
圖4 改進型ADRC的PMSM伺服系統控制框圖
在實際工作過程中,PMSM伺服包裝控制系統有時會頻繁變動位置,因此文中設計了空載變位置實驗,驗證系統的動態特性;也會因為溫度過高,車間粉塵多等惡劣工況,產生摩擦力矩,導致負載變化,文中針對這一情況設計了變載實驗,驗證系統的抗擾特性;PMSM伺服包裝控制系統也會存在跟蹤某一工件的情況,例如機械臂,因此文中設計了跟蹤正弦信號的跟蹤實驗,驗證系統的跟蹤精度。為了增加實驗的可靠性,文中將選取PID控制器、傳統ADRC控制器、基于指數函數改進非線性函數的ADRC控制器(E–ADRC)[21]和I–ADRC作為對比,進行實驗。根據圖4,在Matlab/Simulink環境中搭建仿真模型,永磁同步電機相關參數見表1。
ADRC控制器參數較多,其參數整定相對煩瑣,通常采用智能算法進行整定,但每個控制器模塊又是相互獨立的,可以分開進行參數整定,經過多次調試,最終所得改進型ADRC參數見表2。
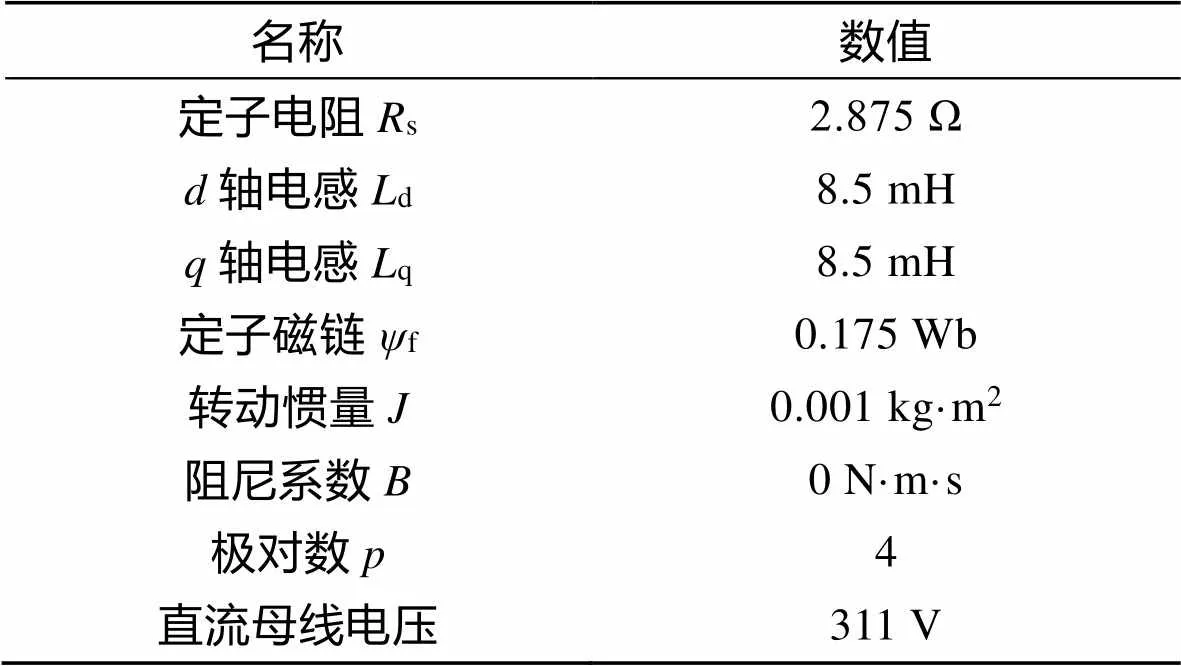
表1 永磁同步電機參數
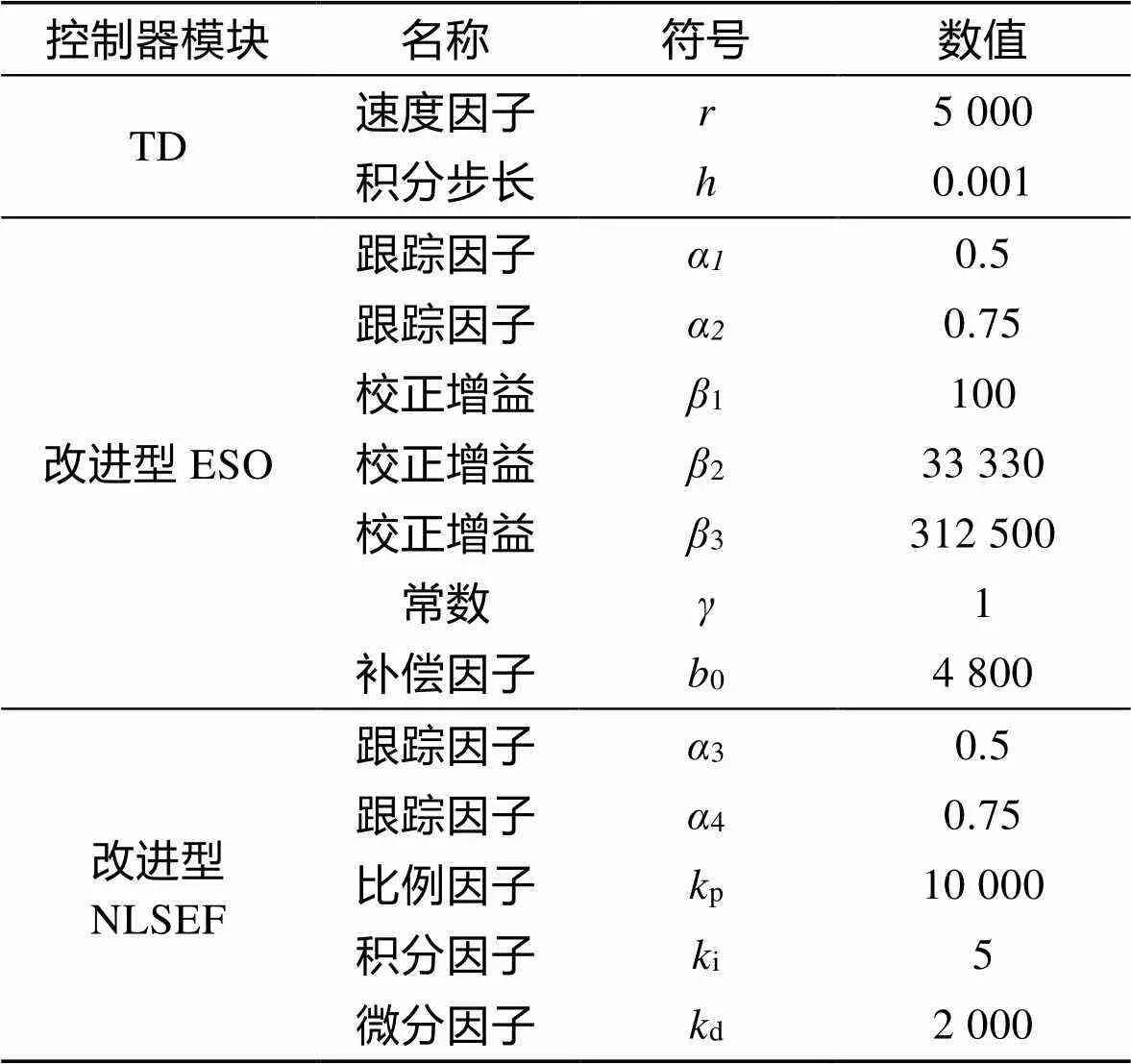
表2 改進型ADRC參數
3.1 空載變位置實驗——動態特性
在空載變位置實驗中,電機轉子給定位置角初始值為5 rad空載啟動,在0.2 s時給定位置角突變至1 rad,在0.4 s時突變至3 rad。仿真結果見圖5,整理數據見表3。
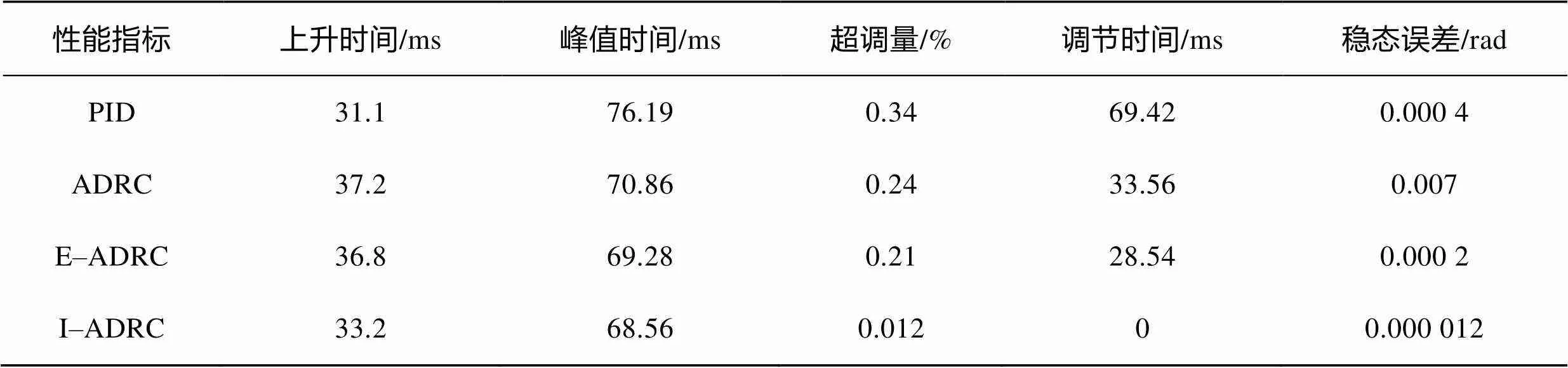
表3 空載變位置實驗電機性能指標
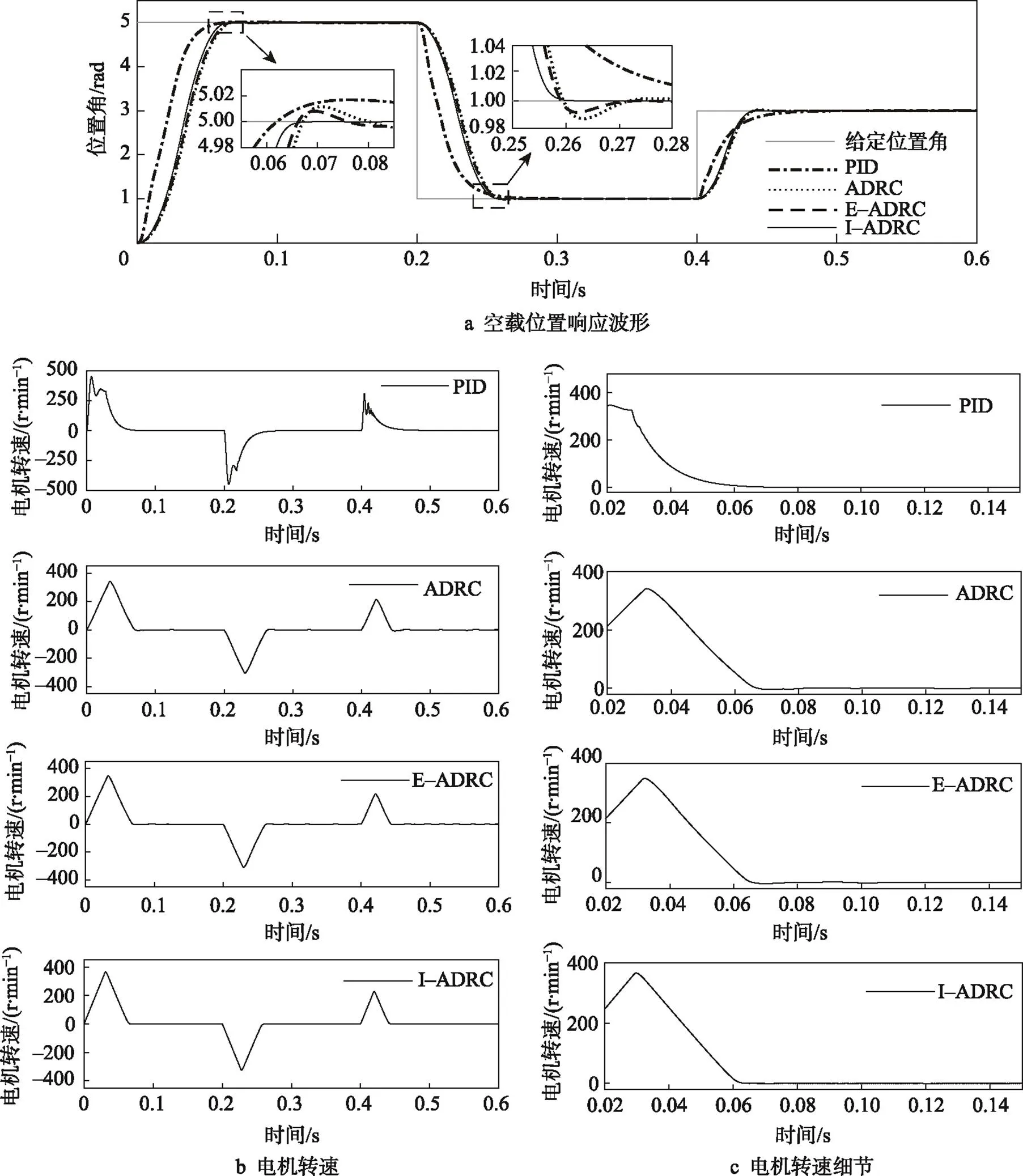
圖5 空載變位置實驗波形
通過表3、圖5a和圖5b可知,在快速性方面,傳統PID控制的上升時間最短為31.1 ms,比I–ADRC快了2.1 ms,這是由于ADRC存在TD安排過渡過程,加速度小于電機所能達到的最大加速度;在接近給定角度時,PID控制的上升速度明顯減慢,而ADRC的上升速度相對平穩,其原因是“小誤差大增益”,在誤差較小時有較大的輸出,使其保持良好的動態特性。在阻尼特性方面,I–ADRC的超調量為0.012%,比PID控制縮小了0.328%;傳統ADRC的超調量為0.24%,比PID控制縮小了0.10%,由此可以說明ADRC控制器很好地調和了快速性與超調之間的矛盾。在文中調節時間選取的是穩態值的±0.2%,I–ADRC的超調始終沒有超過0.2%,因此調節時間為0 ms,優于其他控制方式。由表3和圖5a分析可得,傳統ADRC的穩態誤差為0.007 rad,遠大于其他幾種控制方式,這是由于fal函數不可導,曲線不夠光滑,因而容易產生高頻顫振,改進fal函數的I–ADRC的穩態誤差為0.000 012 rad,遠小于PID控制和E–ADRC控制。單獨觀察圖5a分析可知,在變角度時,I–ADRC控制能保持原有的動態性能;而PID控制的上升時間變長,超調變小,與給定位置角度5 rad時的動態性能相比相差較大,因此,I–ADRC與其他控制方式相比,具有更好的動態特性和穩態精度。在實際工作過程中,當包裝機械頻繁變動位置時,采用I–ADRC的包裝機械能夠快速地完成工作,也不會因為系統位置變動頻繁產生較大的誤差,在保證良好的魯棒性前提下,滿足包裝機械的精度要求。
3.2 變載實驗——抗擾特性
在變載實驗中,電機轉子給定角度初始值為5 rad空載啟動,在0.2 s時將負載突增至5 N·m,在0.4 s時負載突減5 N·m。仿真結果見圖6,整理數據見表4。
通過表4、圖6a和圖6b可知,在負載突增時,ADRC的角度突變峰值和轉速突變峰值遠小于傳統PID控制,其中I–ADRC的角度突變峰值和轉速突變峰值小于E–ADRC和傳統ADRC。如果用角度超調量表示就顯得更加直觀,I–ADRC的角度超調量為0.11%,比E–ADRC的小了0.14%,比傳統ADRC的縮小了0.38%,比PID控制的足足縮小了2.21%。觀察表4、圖6a和圖6d可得,由于PID的突變較大,恢復時間遠遠大于ADRC,I–ADRC的恢復時間最短;在穩態性能方面,PID控制的穩態誤差為0.000 8 rad,小于I–ADRC的0.001 6 rad和傳統ADRC的0.007 3 rad,說明PID控制相較于ADRC在穩態精度上有優勢。觀察圖6b、圖6c可以發現,當突加負載時,PID控制的轉速發生了明顯的變化,而I–ADRC的轉速變化相對較小,幾乎可以忽略,具有極強的抗擾能力。觀察圖6a和圖6e在負載突減時,情況與負載突增時相類似,只是角度突變峰值、超調量、恢復時間和穩態誤差相較于負載突增時,整體都小一些。綜合比較表4中的各個因素,I–ADRC控制比其他幾種控制方法恢復時間更短,超調量更小,體現出更好的抗擾能力,適用于負載變動頻繁的伺服系統。在實際的車間中,由于粉塵、溫度等影響,包裝機械往往會發生抖動,產生較大的噪聲,導致控制精度降低,精確定位時間加長。改進的包裝機械突變峰值較低,穩態誤差較小,恢復時間短,因此其抖動程度和噪聲較小,精確定位時間較短,系統更趨于穩定,能有效避免意外事件的發生。
3.3 空載跟蹤實驗——跟蹤特性
在空載跟蹤實驗中,以電機轉子給定角為正弦輸入θ=sin(10π1.5π)1啟動,仿真結果見圖7,整理數據見表5。
通過表5、圖7b和圖7c可知,在跟蹤正弦信號時,PID控制存在明顯的跟蹤誤差,這是由于跟蹤正弦信號時,轉速較低,只有62 r/min,PID控制器的輸出較小,不足以充分激勵電流內環,從而導致跟蹤誤差的產生。ADRC則具有更短的滯后時間,更小的幅值衰減,是因為ADRC依靠轉速、位置的綜合非線性控制,在低速時具有良好的位置調節功能,使得ADRC能夠很好地跟蹤正弦信號。其中,I–ADRC的滯后時間為1.953 ms,遠遠小于傳統PID控制的16.7 ms,比次優的E–ADRC快了0.074 ms,轉化成相位差,PID的相位差高達15°,而I–ADRC僅有1.758°。在幅值衰減方面,圖7a能明顯的看出PID控制的衰減,衰減比例達到了正弦波最大幅值的6.692%,在幅值衰減方面I–ADRC比其他2種控制方式具有一定的優勢,因此I–ADRC具有高精度的跟蹤性能。

表4 變載實驗電機性能指標
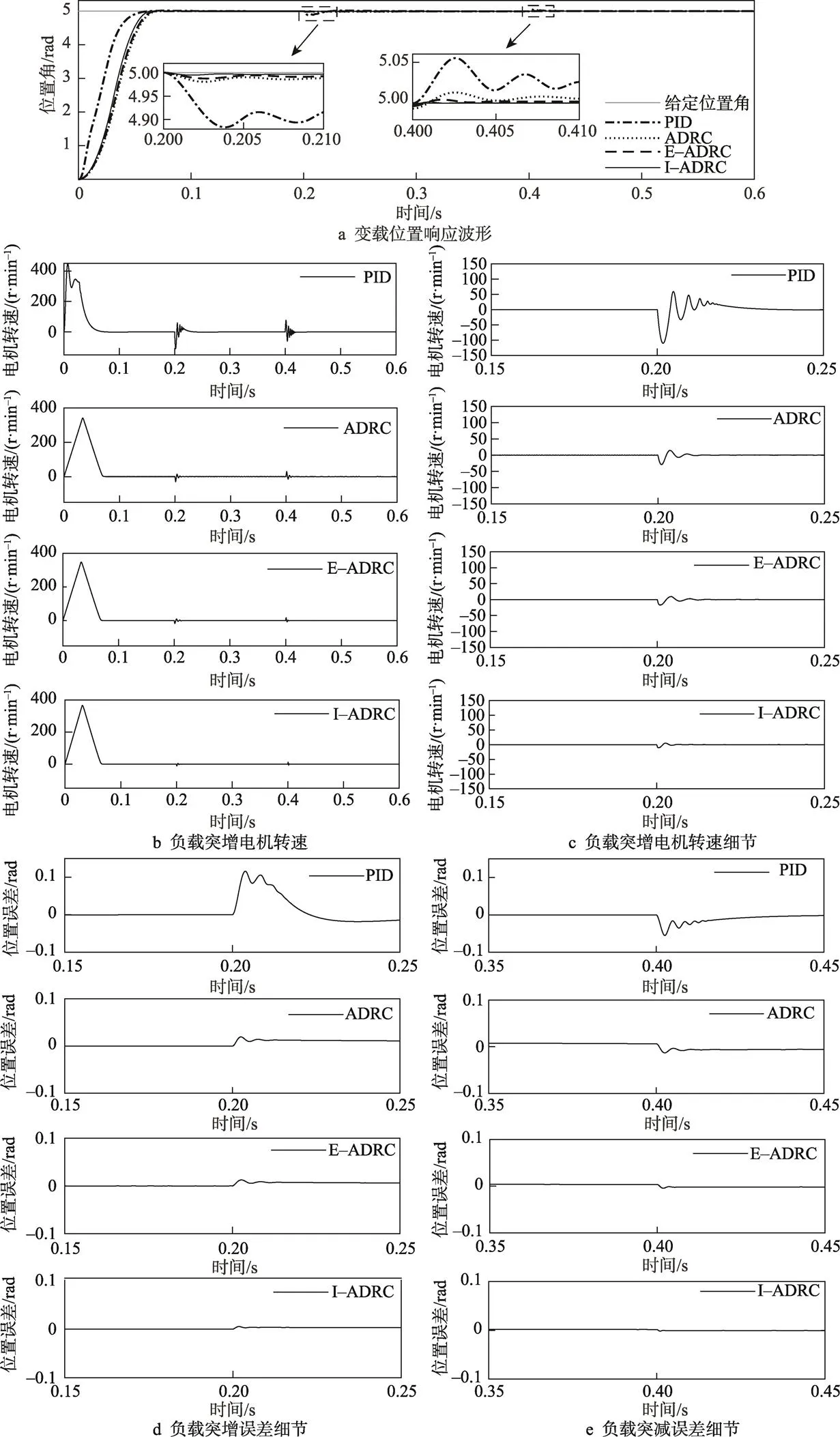
圖6 變載實驗波形
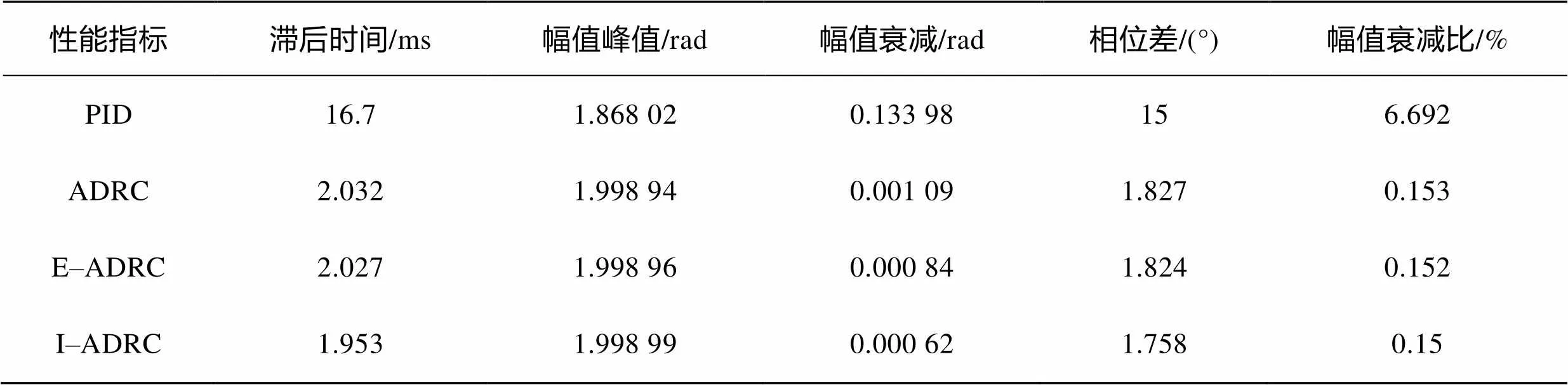
表5 空載跟蹤實驗電機性能指標
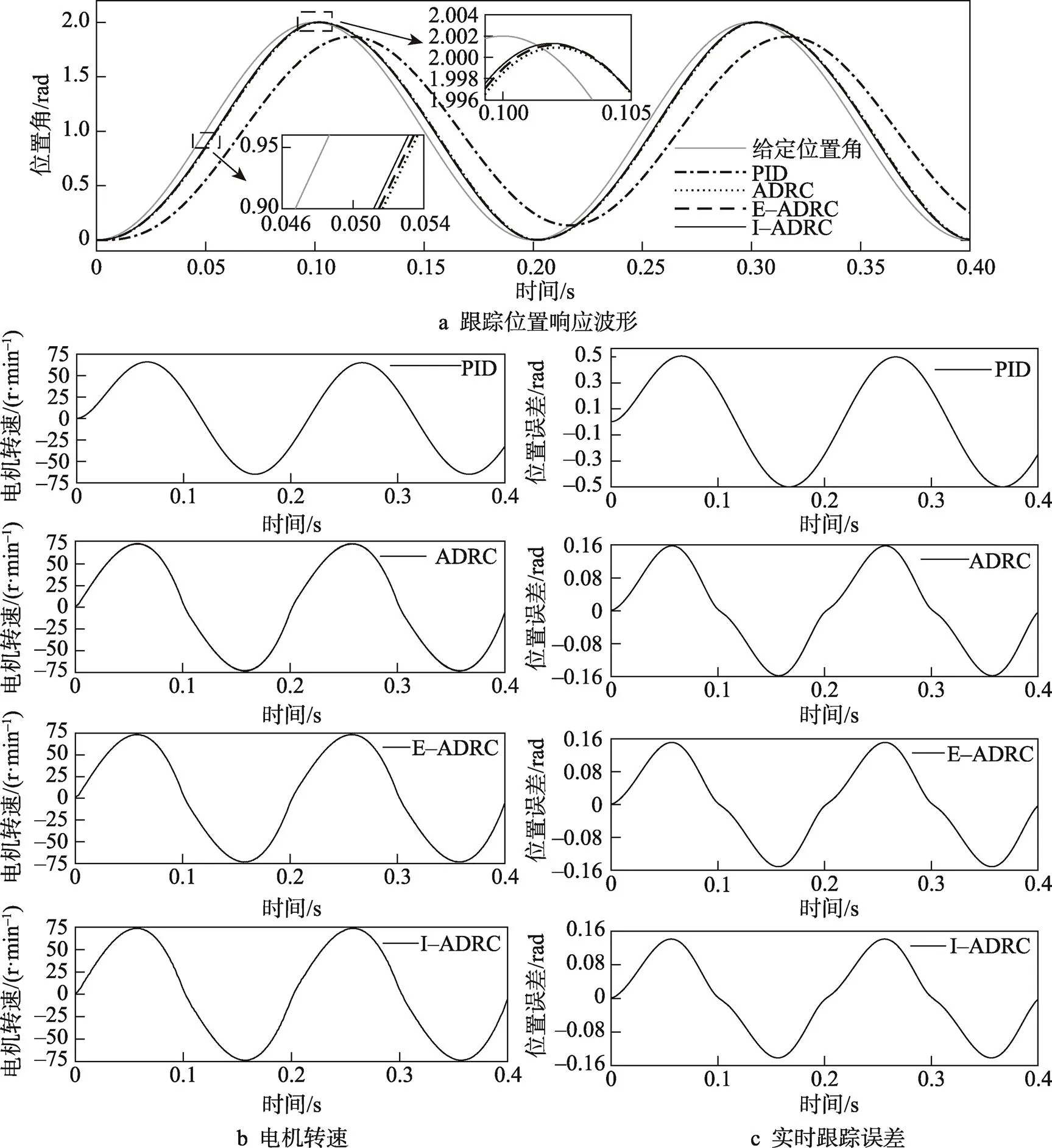
圖7 空載跟蹤實驗波形
4 結語
文中遵循了“小誤差大增益,大誤差小增益”的原則,對非光滑函數fal進行改進,得到新的非線性函數tal,該函數具有很好的平滑性和連續性,有效地減小了在原點處的高頻顫振;將積分項引入非線性狀態誤差反饋控制率中,提高了系統的穩態精度,并且由此構建改進型ADRC,并與傳統PID控制、傳統ADRC和E–ADRC做對比,進行了變位置、變載和跟蹤實驗。通過實驗仿真數據可以得到,改進后的自抗擾控制器具有良好的動態特性、穩態精度、抗擾能力和跟蹤特性。改進后的包裝機械在復雜的工況下有效地提高了工作效率,產生較小的抖動和噪聲,具有較高的控制精度;當應用到類似于機械臂的場合時,改進后的包裝機械也具有較高的跟蹤精度,符合包裝行業對新型包裝機械的要求。
[1] 劉新樂, 殷曉坤, 朱佳琪, 等. 基于伺服電機的上蓋機控制系統設計[J]. 包裝與食品機械, 2018, 36(4): 54-57.
LIU Xin-le, YIN Xiao-kun, ZHU Jia-qi, et al. Design of Control System for Capping Machine Based on Servo Motor[J]. Packaging and Food Machinery, 2018, 36(4): 54-57.
[2] DONG Tian-fei. Automatic Control of Food Packaging Machinery[C]// 6th International Conference on Advances in Energy Environment and Chemical Engineering, Electronic Network, 2020: 052067.
[3] 董家臣, 高欽和, 陳志翔, 等. 考慮電流環動態響應的永磁直線同步電機新型線性自抗擾控制[J]. 中國電機工程學報, 2019, 39(8): 2436-2448.
DONG Jia-chen, GAO Qin-he, CHEN Zhi-xiang, et al. New LADRC Design for Permanent Magnet Linear Synchronous Motor Considering Dynamic Response of Current Loop[J]. Proceedings of theCSEE, 2019, 39(8): 2436-2448.
[4] 聶川, 祝九思, 唐佳. 改善步進電機電流響應速度的抗飽和PI控制[J]. 包裝工程, 2017, 38(17): 153-157.
NIE Chuan, ZHU Jiu-si, TANG Jia. Improvement of Anti-Windup PI Control of Current Response Speed for Stepping Motor[J]. Packaging Engineering, 2017, 38(17): 153-157.
[5] DENG Yong-ting, WANG Jian-li, LI Hong-wen, et al. Adaptive Sliding Mode Current Control with Sliding Mode Disturbance Observer for PMSM Drives[J]. ISA Transactions, 2019, 88: 113-126.
[6] ROMAN R C, PRECUP R E, PETRIU E M, et al. Combination of Data-Driven Active Disturbance Rejection and Takagi-Sugeno Fuzzy Control with Experimental Validation on Tower Crane Systems[J]. Energies, 2019, 12(8): 1-9.
[7] 孫斌, 王海霞, 蘇濤, 等. 永磁同步電機調速系統非線性自抗擾控制器設計與參數整定[J]. 中國電機工程學報, 2020, 40(20): 6715-6725.
SUN Bin, WANG Hai-xia, SU Tao, et al. Nonlinear Active Disturbance Rejection Controller Designand Tuning for Permanent Magnet Synchronous Motor Speed Control System[J]. Proceedings of the CSEE, 2020, 40(20): 6715-6725.
[8] 韓京清. 自抗擾控制技術估計補償不確定因素的控制技術[M]. 北京: 國防工業出版社, 2008: 134-136.
HAN Jing-qing. Active Disturbance Rejection Control Technique[M]. Beijing: National Defense Industry Press, 2008: 134-136.
[9] LI Jie, XIA Yuan-qing, QI Xiao-hui, et al. Absolute Stability Analysis of Non-Linear Active Disturbance Rejection Control for Single-Input-Single-Output Systems via the Circle Criterion Method[J]. IET Control Theory & Applications, 2015, 9(15): 2320-2329.
[10] 陳志旺, 張子振, 曹玉潔. 自抗擾fal函數改進及在四旋翼姿態控制中的應用[J]. 控制與決策, 2018, 33(10): 1901-1907.
CHEN Zhi-wang, ZHANG Zi-zhen, CAO Yu-jie. FalFunction Improvement of ADRC and Its Application in Quadrotor Aircraft Attitude Control[J]. Control and Decision, 2018, 33(10): 1901-1907.
[11] CASTANEDA L A, LUVIANO J A, CHAIREZ I. Robust Trajectory Tracking of A Delta Robot Through Adaptive Active Disturbance Rejection Control[J]. IEEE Transactions on Control Systems Technology, 2015, 23(4): 1387-1398.
[12] 王怡怡, 趙志良. 二自由度無人直升機的非線性自抗擾姿態控制[J]. 自動化學報, 2021, 47(8): 1951-1962.
WANG Yi-yi, ZHAO Zhi-liang. Nonlinear Active Disturbance Rejection Attitude Control of Two-DOF Unmanned Helicopter[J]. Acta Automatica Sinica, 2021, 47(8): 1951-1962.
[13] 周濤. 基于反雙曲正弦函數的擴張狀態觀測器[J]. 控制與決策, 2015, 30(5): 943-946.
ZHOU Tao. Extended State Observer Based on Inverse Hyperbolic Sine Function[J]. Control and Decision, 2015, 30(5): 943-946.
[14] 楊淑英, 王玉柱, 儲昭晗, 等. 基于增益連續擴張狀態觀測器的永磁同步電機電流解耦控制[J]. 中國電機工程學報, 2020, 40(6): 1985-1996.
YANG Shu-ying, WANG Yu-zhu, CHU Zhao-han, et al. Current Decoupling Control of PMSM Based on an Extended State Observer with Continuous Gains[J]. Proceedings of the CSEE, 2020, 40(6): 1985-1996.
[15] 蒲明, 劉鵬, 熊皚. Fal函數的改進及3種新型非線性擴張狀態觀測器[J]. 控制與決策, 2021, 36(7): 1655-1662.
PU Ming, LIU Peng, XIONG Ai. Advanced Fal Function and Three Novel Nonlinear Extended State Observers[J]. Control and Decision, 2021, 36(7): 1655-1662.
[16] YANG Jun, HUA Chenwen, LI Shi-hua, et al. Disturbance/Uncertainty Estimation and Attenuation Techniques in PMSM Drives—A Survey[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3273-3285.
[17] 朱斌. 自抗擾控制入門[M]. 北京: 北京航空航天大學出版社, 2017: 21-42.
ZHU Bin. Introduction to Active Disturbance Rejection Control[M]. Beijing: Beijing University of Aeronautics & Astronautics Press, 2017: 21-42.
[18] 閆桂林. 基于自抗擾四旋翼飛行器控制系統設計[D]. 鎮江: 江蘇科技大學, 2019: 34-40.
YAN Gui-lin. Control System Design of Quadrotor Aircraft Base on Active Disturbance Rejection[D]. Zhenjiang: Jiangsu University of Science and Technology, 2019: 34-40.
[19] 廖自力, 趙其進, 劉春光. 基于自抗擾技術的PMSM無位置傳感器優化控制[J]. 微電機, 2018, 51(7): 44-47.
LIAO Zi-li, ZHAO Qi-jin, LIU Chun-guang. Sensorless Optimal Control for PMSM Based on Active Disturbance Rejection Control[J]. Micromotors, 2018, 52(7): 44-47.
[20] LOZGACHEV G I. On a Method of Construction of Lyapunov Function[J]. Autom Remote Control, 1998, 59: 1365-1368.
[21] 周啟航, 野邵文, 向政委, 等. 高超聲速飛行器再入姿態改進自抗擾控制[J]. 計算機仿真, 2012, 29(12): 90-94.
ZHOU Qi-hang, YE Shao-wen, XIANG Zheng-wei, et al. Posture Improved Auto-Disturbance-Rejection Control for Hypersonic Missilein Reentry[J]. Computer Simulation, 2012, 29(12): 90-94.
Servo Control of PMSM Based on Improved ADRC
JIN Ai-juan, DING Zhe-qi, LI Shao-long, ZHANG Hao, JIANG Xiao-en
(University of Shanghai for Science and Technology, Shanghai 200093, China)
The work aims to solve the problems of slow packaging speed and worrying packaging quality of traditional packaging machinery, so as to meet the requirements of high efficiency and high precision of packaging machinery, and improve the automation level of food packaging and the economic benefits of packaging enterprises.For the permanent magnet synchronous motor with great potential, the controller and control method were studied and improved, and finally the active disturbance rejection controller was selected. The non-smooth function fal in the active disturbance rejection controller was improved to obtain a continuous and smooth tal function to reduce the flutter around the origin, and the nonlinear state error feedback rate and extended state observer were redesigned based on the tal function to achieve better control effect of permanent magnet synchronous motor. From the simulation results, tal function had better smoothness and continuity than fal function. The permanent magnet synchronous motor based on improved ADRC had better dynamic performance, steady-state accuracy, anti-interference ability and tracking ability. The optimized permanent magnet synchronous motor servo control system is suitable for occasions with high precision and frequent load changes and can effectively improve the level of packaging automation and meet the requirements of packaging industry such as high efficiency and high precision.
packaging machinery; permanent magnet synchronous machines (PMSM); active disturbance rejection control;nonlinear function
TM341
A
1001-3563(2023)01-0151-11
10.19554/j.cnki.1001-3563.2023.01.017
2022?04?17
國家自然科學基金(11502145)
金愛娟(1972—),女,博士,副教授,碩導,主要研究方向為控制理論、電機及其控制、電力電子。
責任編輯:曾鈺嬋
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55