一種通用的機構部件運動函數求解方法
2023-02-18 08:35:18冀邯磊高建罡
機械工程師 2023年1期
冀邯磊,高建罡
(邯鄲市永年區海翔機械廠,河北邯鄲 057150)
0 引言
在機械結構的設計之初,有時需要知道某個部件的運動規律作為設計的參考。對于運動比較規律的部件,可以通過計算得到其運動規律,比如多個齒輪傳動,可以通過計算齒數比,得到其中任意一個齒輪的轉速;也有很多運動不規律的部件,無法通過計算直接得到這個部件的運動函數,或者計算過程十分復雜。下面以一個簡單的升降機構為案例,講解一種通用的機構部件運動函數的求法。
1 方法概述
如圖1中展示的是一種液壓桿驅動的升降機構,液壓桿伸縮帶動連桿機構收縮,進而驅動平臺升降運動,由于平臺的升降是連桿經過一系列的連鎖反應實現的,所以平臺位置移動函數很難直接通過計算得到,即使可以計算得出,也需要大量的計算,過程十分的緩慢。
UG NX三維軟件可以對機構進行運動仿真[1],UG NX運動仿真是在已經建模裝配好的機構模型上進行的。通過定義機構中的各個連桿,然后創建連接,最后添加驅動使機構可以持續地進行運轉。這樣便可以模擬機構的實際運動過程。從而分析機構的運動規律,研究機構靜止或運動時的狀態。最后根據得到的數據對模型進行進一步的優化改進。UG NX運動仿真模塊提供了非常強大的分析功能,不僅可以跟蹤機構中某個部件的運動過程,做出運動軌跡,還可以做出某部件的運動曲線圖,導出運動數據,這就為我們得到某個部件的運動函數提供了便利,但是UG NX軟件無法導出函數,而Matlab軟件有強大的數據處理能力,可以把海量的數據擬合成函數,Matlab是一個包含大量計算算法的集合。其擁有600多個工程中要用到的數學運算函數,可以方便地實現用戶所需的各種計算功能。另外Matlab還包括擁有數百個內部函數的主包和三十幾種工具包,方便使用者處理數據。
本方法就是結合兩個軟件的優勢來求得部件的運動函數。求平臺位移運動函數的過程可以分為兩步。第一步:通過UG NX建模,并對模型進行運動仿真,然后導出部件運動過程參數的Excel表格。第二步:通過Matlab的Cftool工具對數據進行運算,得到這個部件的運動函數。
2 機構運動方針構建和運動數據的導出
UG NX運動模塊是一個集成的CAE工具,提供了全面的機構建模和分析功能,可以模擬和評估機械運動系統,通過運動仿真過程中分析板塊下的作圖指令得到需要的函數數據。
1)首先我們需要模擬機構實際的運動狀態和尺寸建立模型[2]。因為我們要求得平臺在液壓桿兒推動情況下位置的變化。因為液壓桿的伸縮距離相對時間是固定的,整個機構各個鏈接的位移都是穩定的,沒有冗余設計,所以平臺其他位置的變化也是固定的。因此對所建模的材質和密度就不需要做要求,只要保證相對位置正確、配合的類型正確、控制好間隙就可以了。另外在裝配部件時,各個部件之間的裝配關系一定要根據實際情況裝配。否則在進入到運動仿真環境后,將約束轉化為運動副時會產生錯誤的運動副,而使運動仿真過程無法進行。
2)接著進入到運動仿真環境新建仿真[3],將仿真文件保存到模型文件夾;分析類型為動力學,組件選項為基于組件的仿真,由于模型文件已經添加好裝配關系,所以要選擇上“新建仿真時啟動運動副向導”,這樣會自動生成運動副,節省創建連桿和運動副的時間,雖然有時約束轉化成的運動副不是我們想要的效果,我們可以單獨對這個運動副進行修改,依然會節省不少時間。我們選擇“新建仿真時啟動運動副向導”后,會有彈窗提示各個約束所轉化成的運動副,直接確認就可以了。另外也可以直接進入到運動仿真環境,然后在運動仿真環境下建立各種運動副。在這個案例的模型中,主要用到了滑動副、柱面副和旋轉副。
3)定義連桿。如果是啟動了運動副向導,會直接自動生成連桿。需要檢查一下各個部件是否有對應的連桿,如果沒有則需要點擊工具欄中的連桿命令新建連桿。質量屬性選項和質量與力矩選項選擇默認,可以使用系統默認的名稱或者自己對連桿命名。這里的連桿并不是指字面意義上機構中的連桿。而是只能夠滿足運動需要使運動副連接在一起的機構元件,各個連桿相互連接使整個機構的運動可以順利進行。所以所有參與到機構運動仿真中的部件都要定義為連桿。這里需要注意的是,除了底座是固定連桿,其他的連桿都需要將連桿對話框中的設置選項中“固定連桿”前面的對號去掉。為了提高運動仿真的效率,在定義連桿時,一起運動的部件,并且彼此間沒有相對運動的部件,可以定義為成一個連桿。比如機構中所有不動的部件都可以設定為一個固定連桿。這樣和一個個去設定成為固定連桿,對運動仿真的過程是沒有影響的,效果是一樣的,但是設定為一個連桿就會減少連桿命名數量,節省不少時間。
4)定義運動副。連桿定義完成以后,為了使整個機構能夠運行起來,需要使每個相鄰的連桿以一定的方式連接起來。并且這種連接必須是可動連接,不能是固定的。這種兩個連桿接觸,而又保證某些相對運動的可動連接被稱為運動副。
在運動導航器中有一個運動副的選項。下拉列表中展示了由約束轉化過來的運動副或者自己創建的運動副。在創建運動副的時候需要注意的有3點:a.底座和連桿之間,連桿和連桿之間,還有平臺和部分連桿使用的都是旋轉副配合。這樣可以防止連桿之間有橫向的竄動,只有相對的旋轉運動;b.平臺和兩個連桿兒通過滑塊采用的是滑動副,這樣可以保證滑塊相對平臺有一個相對滑動的運動。c.最后是液壓桿設定,液壓桿兩端分別是旋轉副,本身的兩個部件之間是柱面副,柱面副可以實現模擬液壓桿伸縮的過程。最后要注意的是,很多運動副都需要設置嚙合連桿,一定要注意主次關系,如果把要運動的部件設定為嚙合連桿,而固定的部件設定為操作連桿,則機構在運動仿真時就不會運動。
5)添加驅動。在定義完運動之后,需要給機構添加驅動來模擬機構的實際運行情況。這個驅動是機構運動的。UG NX運動仿真模塊提供了豐富的驅動類型。可以是固定數值,也可以是指定的函數。以模擬機構真實的運動狀態。本次使用的模型,整個機構的運行都是靠液壓桿提供的動力,所以我們只需要給液壓桿添加一個驅動就可以了。液壓桿本身有一個滑動副,所以我們需要給這個滑動副添加一個驅動。平臺的升降過程是:液壓桿伸長啟動→加速→減速→速度降為0(升到最高點)→液壓桿收縮啟動→加速→減速→速度降為0(降到最低點)。根據整個平臺升降的流程,最好使用函數進行驅動,能最大程度地接近實際的使用情況,這里選擇的是正弦函數,基本上可以模擬平臺升降的流程。在這個滑動副的對話框有一個驅動選項,然后在數據類型里面選擇速度,使用的是函數驅動,接著在函數模擬器里面選擇正弦函數,然后對正弦函數進行編輯。用途選項選擇“運動”,函數類型選擇“時間”,我們編輯完的正弦函數是y=50sin X,X 表 示時 間,y 表示液壓桿的位移,模擬液壓桿伸出和收縮的過程(如圖2)。

圖2 函數管理器
6)創建解算方案及仿真動畫[4]。仿真模型定義完成后,必須定義運動分析的解算方案,并通過解算器求解,才能獲得各個部件的運動參數,選擇主頁中的解算方案,分析類型為“運動學/動力學”;注意解算方案選項中步數數值的設置,步數相對應的是數據的采集量,步數太少則生成的數據就少,不利于函數的創建,可以根據運動的復雜程度設置相應的步數,這里設定的時間為10 s,步數為300。重力方向可以根據實際情況設定(如圖3)。由于本次模型所有的部件都進行了約束,并且是純理論的模型,沒有考慮摩擦等情況,所以重力方向的設置沒有影響。最后勾選“通過按確定進行解算”。求解后,選擇播放動畫,可以看到這個動畫的運動過程。
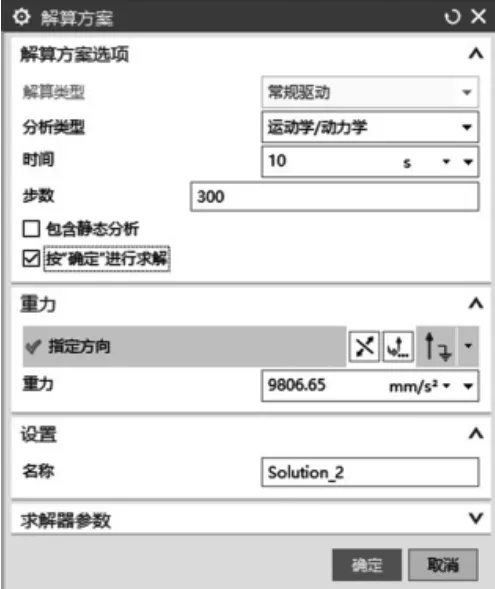
圖3 解算方案
7)導出運動參數。在導出運動參數這一項目上,由這各個版本的操作流程是不一樣的。作者使用的UG NX版本是UG NX12。流程是以UG NX12版本來進行操作。首先選擇標記命令,在平板上的任意一點標記A001,在移動導航器結果類目下右鍵點擊“作圖”命令。在移動導航器下方會出現XY結果視圖。接著在標記選項下方選擇剛才的標記A001。然后返回到XY結果視圖中,點擊位移選項下方Y方向。因為這個平臺在建模中是沿Y方向進行移動的。選擇Y方向可以準確地顯示出平臺升降位移的變化。在Y方向選項上點擊右鍵,選擇“創建圖對象”。這時在運動導航器的作圖選項下方會出現一個新的選項。在出現新的選項上,點擊右鍵,選擇“繪圖至電子表格”。這個時候桌面上會彈出一個Excel電子表格。這個表格共有兩個頁面。一個是圖4所示的表圖。一個是XY的數據電子表格。然后將Excel表格另存為DATA.xlsx。

圖4 數據表圖
3 運動函數的建立
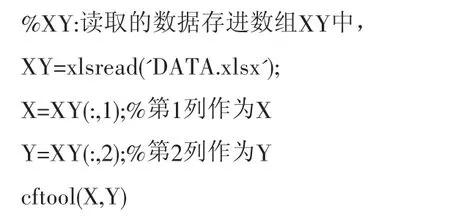
得到Excel表格數據后,對Excel表格進行簡單的編輯,由于平臺的升降是每次升到具體的位置,不需要連續地往復運動,所以抽取一個升降周期的數據就可以滿足實際的使用要求,刪除無用的數據,這樣對于部件運動函數準確性的提高也有一定的幫助,將時間數據放到第一列,位移數據放到第二列,Excel編輯完成后將它保存到Matlab程序的存儲位置,這樣的話Matlab可以直接調用Excel表格,數據在其他位置時Matlab無法選擇。然后打開Matlab軟件[5],輸入程序(如圖5):
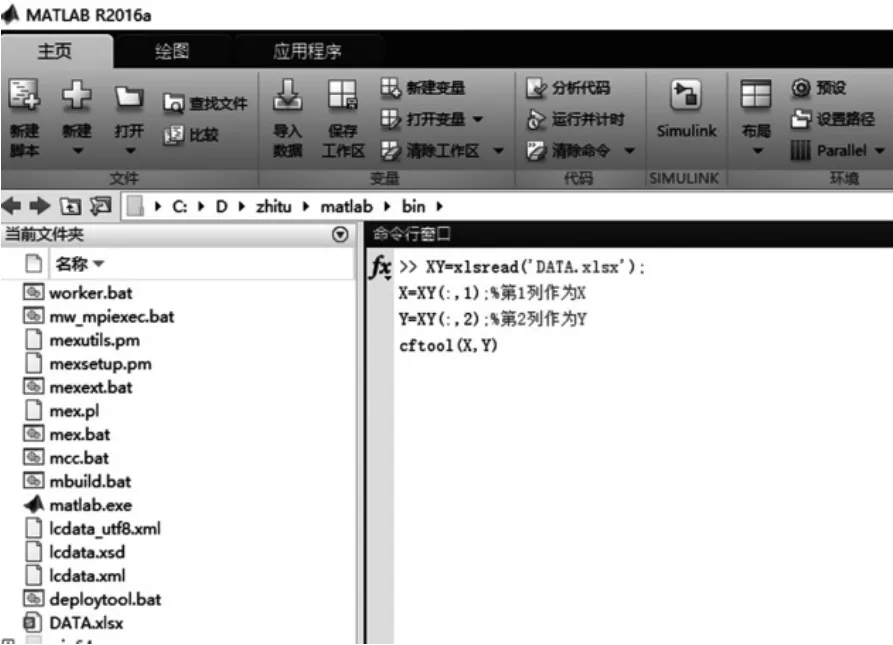
圖5 程序界面
輸入完程序后,會直接調用Excel表格中的時間為橫坐標,位移為縱坐標,自動打開Cftool工具箱[6],工具箱內有多個函數類型可以選擇,經過對比,最后選擇多項式函數(Polynominal),次方數值選擇6,得到擬合函數:

可以看到圖片中擬合曲線和數據點相吻合,多重測定系數(R-square)為1,表明方程的變量對y的解釋能力最強,所以這個擬合函數有一定的實用意義(如圖6)。
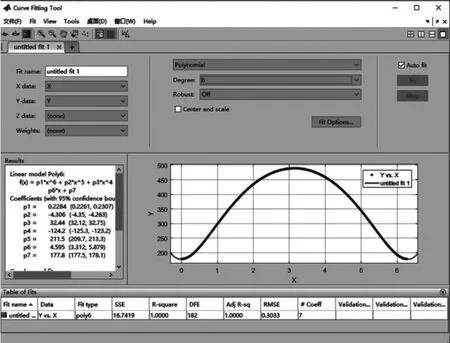
圖6 Cftool工具箱
因為這次模擬部件的運動過程是一個不規則的運動過程,所以只能用擬合函數的方法去得到一個十分接近的函數。如果模仿的機構是非常規律的函數運動。那么用這種方法得到的函數會更加準確無誤。
4 結語
本案例主要是利用UG NX輸出部件的運動參數,再通過Matlab生成位移擬合函數,充分利用了這兩個軟件的優勢。由于運動過程參數不符合已有的函數類型,所以采用了擬合函數,擬合效果足以滿足使用要求,有一定的參考價值。此方法有一定的通用意義,求解過程簡單高效,為機械結構運動函數的創建提供了新思路,可用于機構的輔助設計。
