基于神經(jīng)網(wǎng)絡(luò)的鐵路通信網(wǎng)絡(luò)傳輸延遲控制方法
2023-02-18 02:04:30董玉圻
鐵路通信信號工程技術(shù) 2023年1期
董玉圻
(國家鐵路局裝備技術(shù)中心,北京 100702)
1 概述
經(jīng)過幾代人不懈地努力,國內(nèi)鐵路建設(shè)已經(jīng)發(fā)展得較為成熟[1],中國已成為世界上鐵路運(yùn)輸行業(yè)較為發(fā)達(dá)的國家。通信網(wǎng)絡(luò)是現(xiàn)代化鐵路運(yùn)輸?shù)年P(guān)鍵,可以說是列車的“心臟”。鐵路列車在運(yùn)行過程中通過通信網(wǎng)絡(luò)及時將信息傳遞給中央控制室,中央控制室再根據(jù)這些信息對列車進(jìn)行牽引、制動[2]。通信網(wǎng)絡(luò)在進(jìn)行信息傳輸時,受到各種因素的影響,不可避免地會出現(xiàn)延遲的情況。網(wǎng)絡(luò)延遲對于鐵路通信質(zhì)量有很嚴(yán)重的影響,一旦延遲過大,將嚴(yán)重?fù)p害鐵路運(yùn)輸?shù)陌踩院涂煽啃訹3]。面對這種情況,有必要進(jìn)行鐵路通信網(wǎng)絡(luò)傳輸延遲控制。
耿文鳳[4]提出了一種基于功率控制協(xié)議的延遲控制方法,該方法通過自適應(yīng)調(diào)整數(shù)據(jù)包傳輸功率來降低傳輸延遲,提高傳輸效率。張友鵬[5]等人為解決鐵路時間同步網(wǎng)中上/下行鏈路延遲不一致的情況,利用改進(jìn)實(shí)時計(jì)算數(shù)據(jù)包排隊(duì)延遲算法來實(shí)現(xiàn)對傳輸延遲的補(bǔ)償設(shè)計(jì)。該方法以鐵路時間同步網(wǎng)時鐘模型為基礎(chǔ),然后通過計(jì)算線性時鐘頻差的方式改進(jìn)數(shù)據(jù)包排隊(duì)延遲算法,在求解出排隊(duì)延遲最小數(shù)據(jù)包后,估算排隊(duì)延遲并將其導(dǎo)入到時鐘模型中,得到新的時鐘偏差估計(jì)方式,以此為依據(jù)制定補(bǔ)償方案,可以實(shí)現(xiàn)對延遲量的控制。
前人研究雖然在一定程度上取得了延遲控制目的,但是延遲控制一般缺乏全面的參考,使時延與實(shí)際情況總是存在較大差距。面對這種情況,研究一種基于神經(jīng)網(wǎng)絡(luò)的鐵路通信網(wǎng)絡(luò)傳輸延遲控制方法(簡稱控制方法)。通過該研究以期提高鐵路通信網(wǎng)絡(luò)傳輸信息效率。
2 鐵路通信網(wǎng)絡(luò)傳輸延遲控制模型設(shè)計(jì)
通信網(wǎng)絡(luò)在鐵路運(yùn)營方面起到重要的作用,關(guān)系到鐵路的啟停、調(diào)度等。一旦通信網(wǎng)絡(luò)出現(xiàn)嚴(yán)重延遲,信息傳遞就會受到影響,耽誤了指令的執(zhí)行,影響鐵路運(yùn)營的安全性和穩(wěn)定性[6]。面對這種情況,研究一種鐵路通信網(wǎng)絡(luò)傳輸延遲控制方法。該方法分為3 部分,即通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)采集、通信網(wǎng)絡(luò)傳輸延遲預(yù)測以及通信網(wǎng)絡(luò)傳輸延遲控制。下面針對這3 個方面進(jìn)行具體分析。
2.1 通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)采集
鐵路通信網(wǎng)絡(luò)傳輸延遲一般由4 部分組成,由此構(gòu)建出通信網(wǎng)絡(luò)傳輸時延模型[7]。模型表達(dá)式如公式(1)所示。

公式(1)中,T代表通信網(wǎng)絡(luò)傳輸總時延;t1、t2、t3、t4分別代表發(fā)送、傳播、處理、排隊(duì)等4 個部分的延遲。
在通信網(wǎng)絡(luò)傳輸時延預(yù)測中,需要以延遲數(shù)據(jù)為基礎(chǔ),因此利用TCN 網(wǎng)絡(luò)分析儀抓取的通信網(wǎng)絡(luò)延遲數(shù)據(jù),具體過程如圖1 所示。
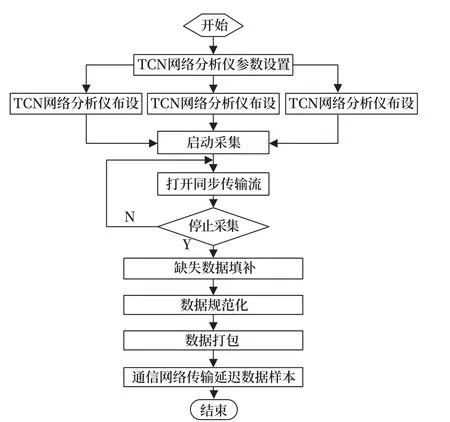
圖1 通信網(wǎng)絡(luò)延遲數(shù)據(jù)采集流程Fig.1 Flowchart of delay data acquisition in a communication network
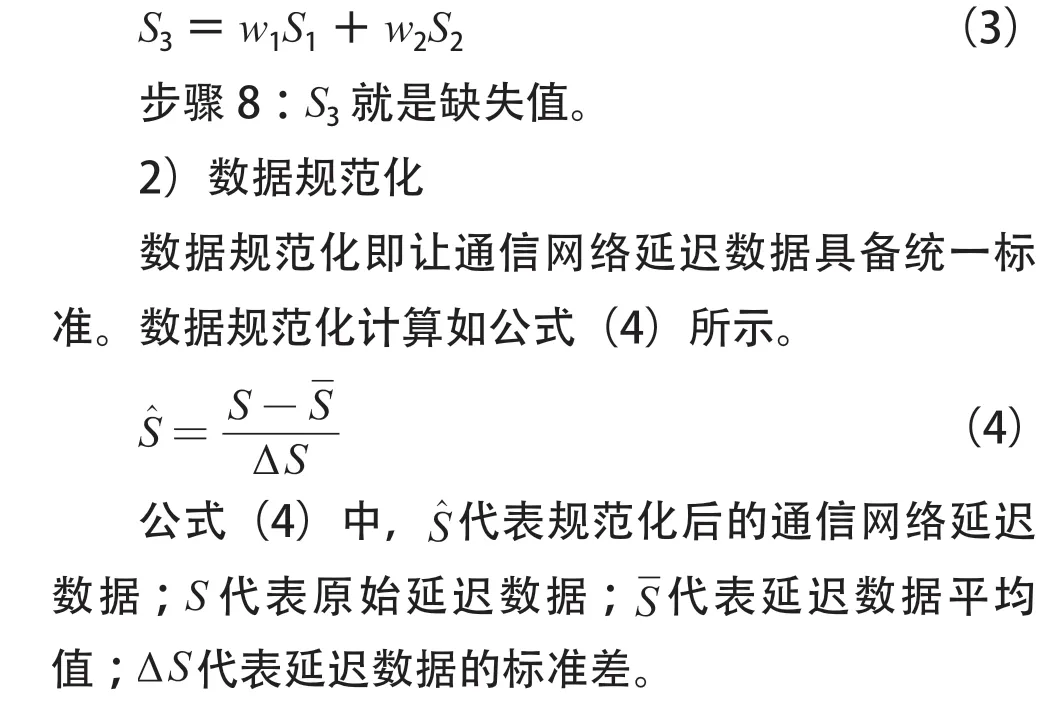
在完成通信延遲數(shù)據(jù)采集之后,為保證數(shù)據(jù)樣本的完整性和全面性,需要對延遲數(shù)據(jù)進(jìn)行缺失填補(bǔ)和規(guī)范化處理[8]。
1)缺失數(shù)據(jù)填補(bǔ)
通信延遲數(shù)據(jù)在采集過程中受到采集設(shè)備以及采集環(huán)境的影響,會存在個別缺失的情況,為此需要進(jìn)行缺失數(shù)據(jù)填補(bǔ)[9]。具體過程如下。
步驟1:通過歷史數(shù)據(jù)計(jì)算歷史通信延遲數(shù)據(jù)之間的相關(guān)因子R。
步驟2:列出缺失序列。
步驟3:利用時間序列法得到擬合值,記為S1。
步驟4:找到與缺失序列相關(guān)性最高維度的時序數(shù)列。
步驟5:利用相關(guān)維度數(shù)據(jù)預(yù)測得到擬合值,記為S2。
步驟6:通過相關(guān)因子計(jì)算相關(guān)權(quán)重,計(jì)算如公式(2)所示。

公式(2)中,w1、w2代表S1、S2對應(yīng)的權(quán)重。
步驟7:通過權(quán)重計(jì)算最終擬合值,記為S3,如公式(3)所示。
基于上述采集并整理好的通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)組成研究樣本。
2.2 基于神經(jīng)網(wǎng)絡(luò)的通信網(wǎng)絡(luò)傳輸延遲預(yù)測
隨著時間的推移,傳輸延遲會逐漸累積,導(dǎo)致延遲越來越嚴(yán)重[10]。為實(shí)現(xiàn)對下一刻延遲的控制,事先明確當(dāng)前時刻通信網(wǎng)絡(luò)傳輸延遲十分重要。為此,利用神經(jīng)網(wǎng)絡(luò)預(yù)測通信網(wǎng)絡(luò)傳輸延遲。預(yù)測過程以采集到的通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)樣本為輸入,得出預(yù)測值[11]。預(yù)測過程分為兩部分,分別為前期的神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練和后期的預(yù)測測試。通過訓(xùn)練可以建立成熟的預(yù)測模型,具體過程如下。
步驟1:初始化,確定神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)、最大允許誤差以及學(xué)習(xí)速率。
步驟2:為基于神經(jīng)網(wǎng)絡(luò)的預(yù)測模型隨機(jī)賦予權(quán)值和閾值。
步驟3:將通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)訓(xùn)練樣本P={p1,p2…pm}和期望輸出Q={q1,q2,…,qn}輸入到神經(jīng)網(wǎng)絡(luò)當(dāng)中。
步驟4:計(jì)算隱含層輸出。計(jì)算如公式(5)所示。

公式(5)中,ηj(l)代表第l層隱含層第j個神經(jīng)元的輸出;wij代表輸入層和隱含層之間的連接權(quán)值;gj(l)代表第l層隱含層第j個神經(jīng)元輸入的通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)樣本;bij代表隱含層與輸入層連接閾值;nl代表第l層隱含層神經(jīng)元數(shù)量;l代表層編號;f代表激勵函數(shù)[12]。
步驟5:計(jì)算輸出層輸出,如公式(6)所示。

公式(6)中,μk(l)代表第l層輸出層第k個神經(jīng)元的輸出;wjk代表隱含層和輸出層之間的連接權(quán)值;bjk代表隱含層與輸入層連接閾值;ml代表第l層輸出層神經(jīng)元數(shù)量。
步 驟6:計(jì) 算μ={μ1,μ2…μn}和Q={q1,q2…qn}之間的誤差,如公式(7)所示。

公式(7)中,c代表誤差;μi代表第i個輸出層神經(jīng)元的實(shí)際輸出。
步驟7:判斷誤差c是否小于設(shè)定的最大允許誤差,若是,終止訓(xùn)練程序,完成基于神經(jīng)網(wǎng)絡(luò)的通信網(wǎng)絡(luò)傳輸延遲預(yù)測模型的訓(xùn)練;否則,更新權(quán)值和閾值[13]。
步驟8:通過訓(xùn)練完成的預(yù)測模型實(shí)現(xiàn)傳輸延遲預(yù)測。
基于上述流程完成基于神經(jīng)網(wǎng)絡(luò)的通信網(wǎng)絡(luò)傳輸延遲預(yù)測。
2.3 通信網(wǎng)絡(luò)傳輸延遲控制
基于上述研究基礎(chǔ),結(jié)合PID 控制器實(shí)現(xiàn)通信網(wǎng)絡(luò)傳輸延遲控制[14]。控制模型如圖2 所示。該控制模型應(yīng)用過程如下。
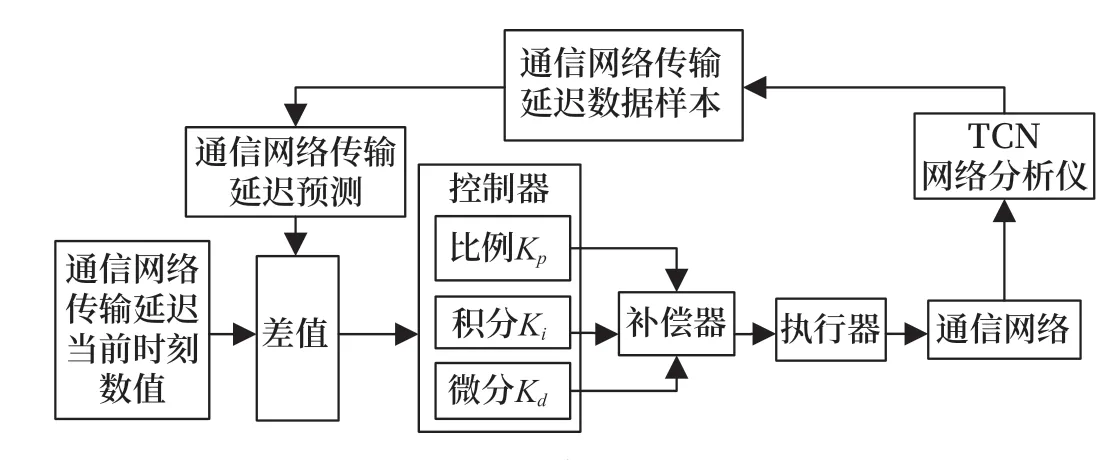
圖2 通信網(wǎng)絡(luò)傳輸延遲控制Fig.2 Transmission delay control in the communication network
步驟1:輸入基于神經(jīng)網(wǎng)絡(luò)預(yù)測的通信網(wǎng)絡(luò)傳輸延遲數(shù)值。
步驟2:計(jì)算當(dāng)前時刻與預(yù)測時刻之間的延遲差值,計(jì)算如公式(8)所示。

公式(8)中,ΔH代表延遲差值;H(t)代表t時刻的通信網(wǎng)絡(luò)傳輸延遲數(shù)值;H(t+1)代表t+1 時刻的通信網(wǎng)絡(luò)傳輸延遲數(shù)值,也就是預(yù)測出的下一刻的傳輸延遲數(shù)值。
步驟3:將ΔH輸入到PID 控制當(dāng)中,通過3個子控制器計(jì)算通信網(wǎng)絡(luò)控制量,計(jì)算如公式(9)所示。
由此得出總控制量計(jì)算的公式,如公式(10)所示。

公式(9)、(10)中,y(t)代表t時刻的延遲控制量;Kp代表比例系數(shù);G1(t)、G2(t)、G3(t)代表t時刻Kp、Ki、Kd等3 個子控制器的輸出;Ti代表積分時間常數(shù);Td代表微分時間常數(shù)。
步驟4:基于控制量,輸入到延遲補(bǔ)償器當(dāng)中,實(shí)現(xiàn)鐵路通信網(wǎng)絡(luò)傳輸延遲控制[15]。延遲補(bǔ)償器模型如公式(11)所示。

公式(11)中,F(xiàn)(t)代表延遲補(bǔ)償器模型;ψ代表延遲補(bǔ)償系數(shù);k代表通信信號衰減因子;Δt代表鐵路通信網(wǎng)絡(luò)傳輸間隔;L代表數(shù)據(jù)包傳輸隊(duì)列長度[16]。
經(jīng)過上述過程,完成基于神經(jīng)網(wǎng)絡(luò)的鐵路通信網(wǎng)絡(luò)傳輸延遲控制研究。
3 控制方法應(yīng)用測試
為測試控制方法在鐵路通信網(wǎng)絡(luò)傳輸延遲控制中的應(yīng)用效果,以基于功率控制協(xié)議的控制方法、基于延遲補(bǔ)償?shù)目刂品椒閷Ρ软?xiàng),進(jìn)行實(shí)例測試。
3.1 通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)樣本
基于TCN 網(wǎng)絡(luò)分析儀采集鐵路通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù),并組成數(shù)據(jù)訓(xùn)練和測試樣本。其中部分樣本如表1 所示。
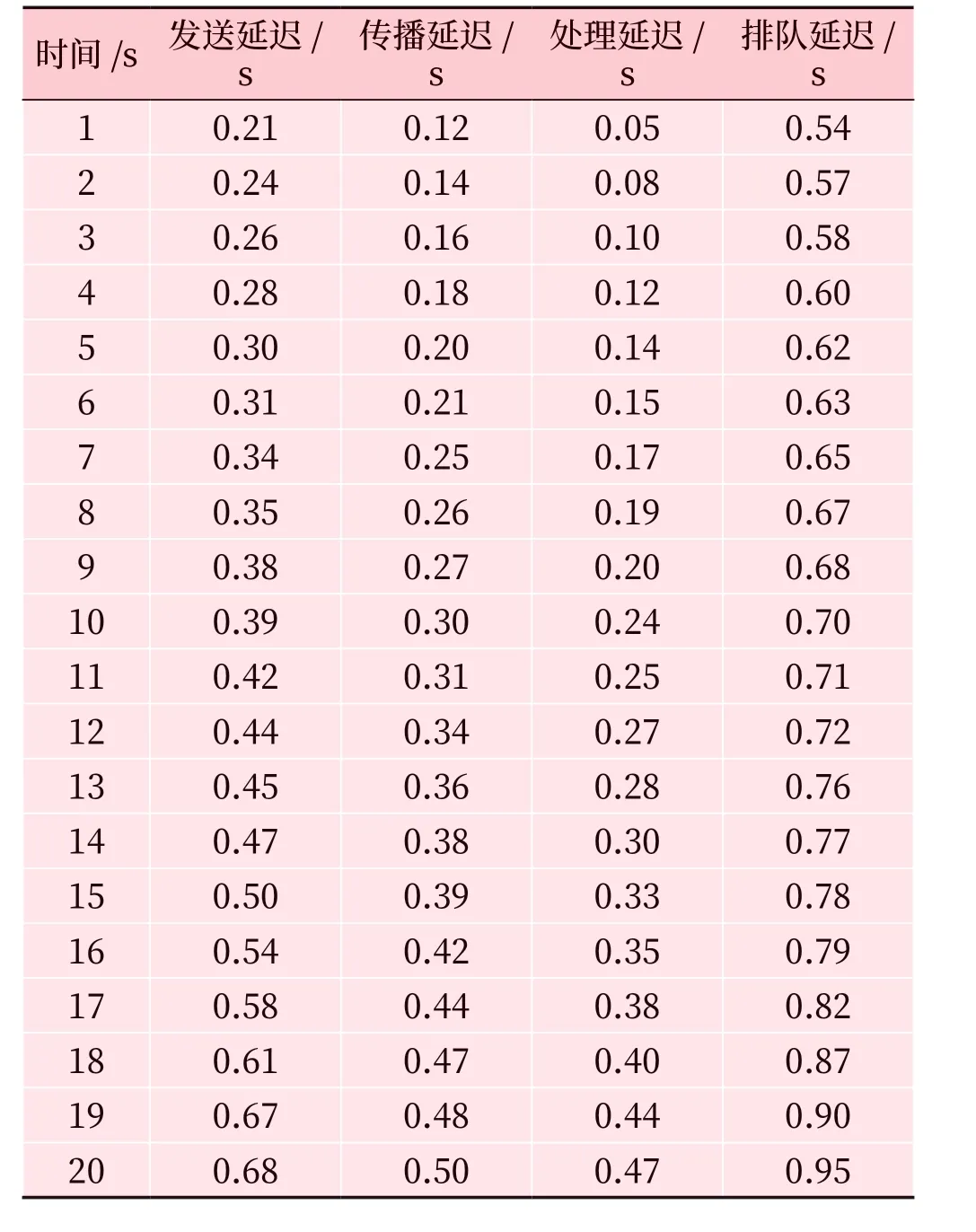
表1 部分通信網(wǎng)絡(luò)傳輸延遲數(shù)據(jù)樣本Tab.1 Samples of transmission delay data in the communication network
3.2 基于神經(jīng)網(wǎng)絡(luò)的傳輸延遲模型訓(xùn)練
神經(jīng)網(wǎng)絡(luò)預(yù)測模型的初始參數(shù)如下:神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)為4/36/1;最大允許誤差為0.001;學(xué)習(xí)速率為0.25;各層連接為0.14、0.32;各層連接閾值為0.036、0.44;最大迭代次數(shù)為100。在上述初始參數(shù)設(shè)置下,結(jié)合表1 訓(xùn)練樣本,進(jìn)行基于神經(jīng)網(wǎng)絡(luò)的傳輸延遲預(yù)測模型訓(xùn)練。結(jié)果如圖3 所示。

圖3 基于神經(jīng)網(wǎng)絡(luò)的傳輸延遲預(yù)測模型訓(xùn)練Fig.3 Training of the model of predicting transmission delays based on a neural network
從圖3 中可以看出,在迭代步數(shù)為86 時,基于神經(jīng)網(wǎng)絡(luò)的傳輸延遲預(yù)測模型的誤差小于0.001,完成訓(xùn)練,可以用于實(shí)際延遲控制中。
3.3 延遲控制結(jié)果
基于2.3 節(jié)的研究,計(jì)算通信網(wǎng)絡(luò)傳輸延遲控制量和延遲補(bǔ)償量,結(jié)果如圖4 所示。
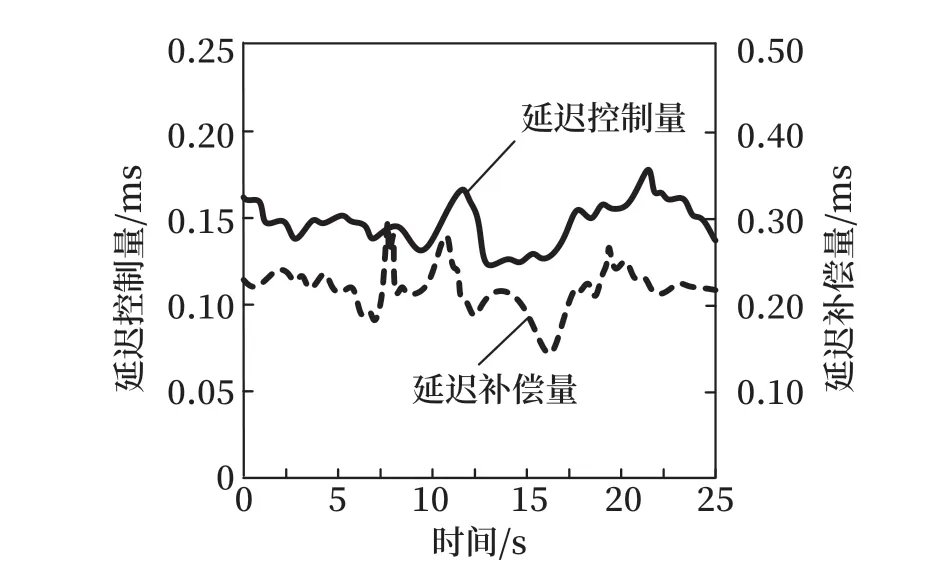
圖4 通信網(wǎng)絡(luò)傳輸延遲控制量和延遲補(bǔ)償量Fig.4 Delay control quantity and delay compensation quantity for transmission in the communication network
3.4 延遲控制結(jié)果
在相同測試條件下,利用基于功率控制協(xié)議的控制方法、基于延遲補(bǔ)償?shù)目刂品椒ㄟM(jìn)行傳輸控制,然后對比控制結(jié)果,即延遲時間以及通信鏈路速率,以此判斷控制方法性能。結(jié)果如圖5、6 所示。
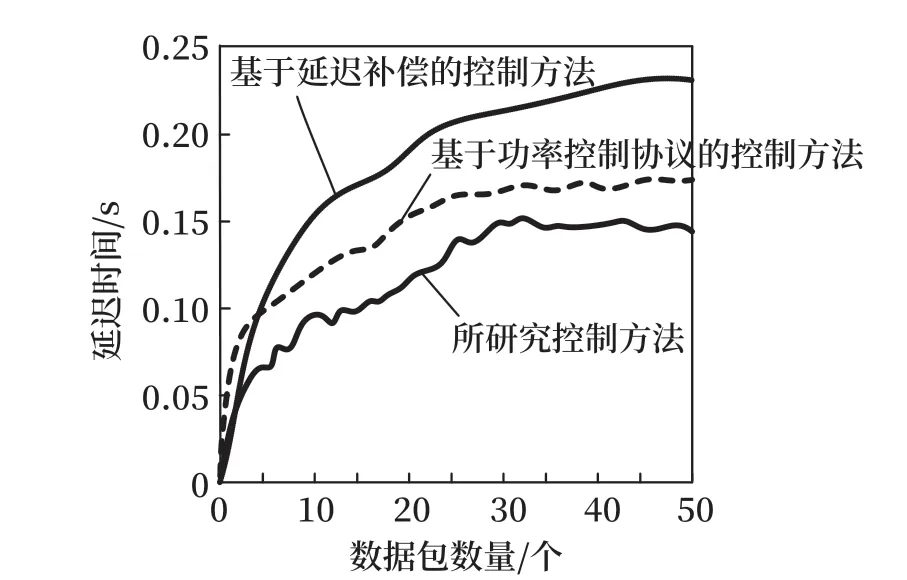
圖5 延遲時間Fig.5 Delay time
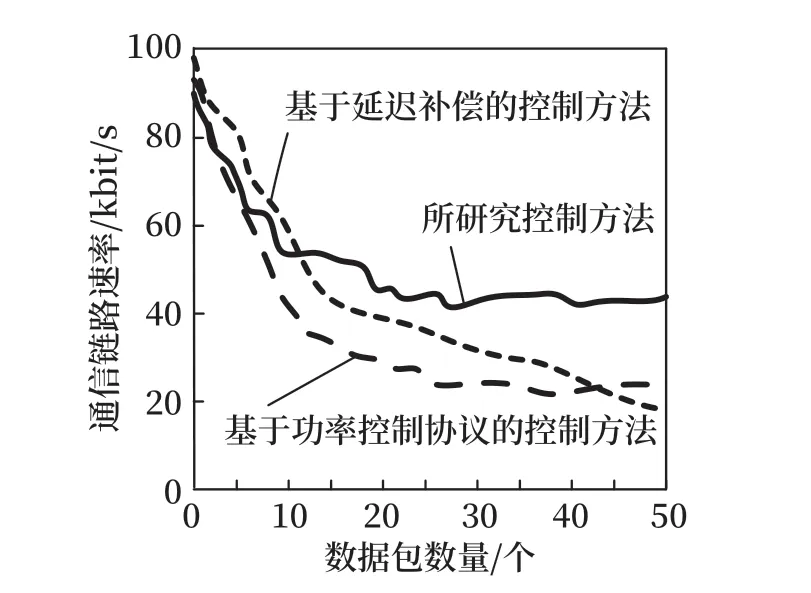
圖6 通信鏈路速率Fig.6 Communication link rate
從圖5、6 中可以看出,與基于功率控制協(xié)議的控制方法、基于延遲補(bǔ)償?shù)目刂品椒ㄏ啾龋刂品椒☉?yīng)用后,延遲時間更短,通信鏈路速率更高,由此證明了控制方法的有效性。
4 結(jié)束語
提出一種基于神經(jīng)網(wǎng)絡(luò)的鐵路通信網(wǎng)絡(luò)傳輸延遲控制方法,控制方法通過神經(jīng)網(wǎng)絡(luò)進(jìn)行延遲預(yù)測,通過預(yù)測結(jié)果得出延遲控制量和延遲補(bǔ)償量,實(shí)現(xiàn)傳輸延遲控制。最后,通過實(shí)例證明應(yīng)用控制方法,傳輸延遲時間有所縮短,通信鏈路速率提高,證明了控制方法的有效性。然而,本研究仍有需要改進(jìn)的地方,即控制方法并沒有將延遲丟包問題考慮在內(nèi),還需要進(jìn)一步擴(kuò)展和深入。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
云南畫報(bào)(2021年12期)2021-03-08 00:50:54
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
鐵道通信信號(2018年7期)2018-08-29 01:17:04
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年4期)2016-04-04 02:58:04
Coco薇(2016年2期)2016-03-22 02:42:52
工程建設(shè)與設(shè)計(jì)(2016年3期)2016-02-27 10:50:46
Coco薇(2015年1期)2015-08-13 02:47:34