光纖計(jì)數(shù)式油菜精量排種器種子流檢測(cè)系統(tǒng)研究
2023-03-07 07:20:08李兆東王韋韋陳永新
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2023年1期
張 甜 蔣 樂 李兆東 謝 瑞 王韋韋 陳永新
(1.安徽農(nóng)業(yè)大學(xué)工學(xué)院, 合肥 230036; 2.安徽省智能農(nóng)機(jī)裝備工程實(shí)驗(yàn)室, 合肥 230036)
0 引言
油菜精量直播技術(shù)是油菜機(jī)械化生產(chǎn)的重要一環(huán)[1]。油菜種子粒徑小,顏色與土壤接近,落入土壤不易發(fā)現(xiàn),其機(jī)械化播種質(zhì)量只能依靠觀察種箱里種子的數(shù)量變化及后期出苗狀況來判斷[2-4]。為清晰直觀地掌握機(jī)械化直播油菜的播種量信息,研制一種油菜種子流檢測(cè)系統(tǒng)具有重要意義。
排種器是播種機(jī)的核心工作部件,其排種性能差將直接影響播種質(zhì)量,導(dǎo)致后期出苗率低、收益差[5-7]。對(duì)此,國內(nèi)外學(xué)者及相關(guān)機(jī)構(gòu)通常采用在排種器的導(dǎo)種管及排種盤等關(guān)鍵部件上安裝檢測(cè)系統(tǒng)對(duì)排種性能進(jìn)行檢測(cè),對(duì)于種子流檢測(cè)相關(guān)研究,一般以下落種子通過傳感器過程中產(chǎn)生的非電信號(hào)轉(zhuǎn)換為可檢測(cè)的脈沖信號(hào)。根據(jù)傳感器類型不同主要可分為光電感應(yīng)式、壓電感應(yīng)式、電容感應(yīng)式和視覺式,其中:光電感應(yīng)式傳感器具有良好的響應(yīng)速度,但工作時(shí)易受光照及灰塵干擾[8];壓電感應(yīng)式傳感器需放置于導(dǎo)種管內(nèi)部,影響種子投送軌跡,以致排種精度不易保證[9];電容感應(yīng)式傳感器易受溫度和寄生電容干擾,其可靠性、穩(wěn)定性等方面不易適應(yīng)田間復(fù)雜環(huán)境[10];視覺式傳感器檢測(cè)精度高、信息獲取直觀,但對(duì)檢測(cè)環(huán)境要求嚴(yán)格,限制了在田間生產(chǎn)中的應(yīng)用[11]。上述傳感器各有優(yōu)勢(shì),但在小粒徑種子流檢測(cè)方面,光電感應(yīng)式傳感器工作穩(wěn)定、響應(yīng)時(shí)間短、分辨率高,可實(shí)現(xiàn)非接觸檢測(cè),成本低廉,成為當(dāng)前應(yīng)用較為廣泛的檢測(cè)手段。
國外研究方面,KARIMI等[12]基于光敏二極管研制了紅外傳感系統(tǒng),該系統(tǒng)可檢測(cè)播種時(shí)種子通過導(dǎo)種管的質(zhì)量流量;HADI等[13]基于種子流監(jiān)測(cè)的紅外激光二極管陣列傳感器構(gòu)建了田間播種監(jiān)測(cè)裝置和播種監(jiān)測(cè)系統(tǒng),實(shí)現(xiàn)了種子流量的測(cè)算;Precision Planting公司基于WaveVision傳感器在導(dǎo)種管內(nèi)安裝種子監(jiān)控系統(tǒng),可實(shí)時(shí)檢測(cè)排種頻率、排種量、漏播以及重播等信息[14];上述國外播種檢測(cè)相對(duì)于國內(nèi)起步較早,播種檢測(cè)技術(shù)比較成熟,但配套硬件產(chǎn)品價(jià)格昂貴,與國產(chǎn)化油菜播種機(jī)具兼容性不佳。
國內(nèi)在排種器種子流檢測(cè)方面進(jìn)行了卓有成效的研究。TANG等[15]采用漫反射光電傳感器和矩形光柵傳感器設(shè)計(jì)了玉米播種質(zhì)量監(jiān)測(cè)系統(tǒng);李兆東等[16]設(shè)計(jì)了一種基于光束阻斷式的漏充和堵孔同步檢測(cè)系統(tǒng),用于檢測(cè)油菜漏充率與堵塞率;賈洪雷等[17]針對(duì)高速精密播種作業(yè)中氣吸式排種器,設(shè)計(jì)了一種排種器吸種狀態(tài)檢測(cè)系統(tǒng),通過對(duì)光電傳感器的輸出信號(hào)和光電編碼器脈沖信號(hào)進(jìn)行處理,得到排種盤每個(gè)吸孔的吸種情況,從而進(jìn)一步獲取整個(gè)排種器的工作狀況;丁幼春等[18-19]針對(duì)油菜播種作業(yè)過程中播量監(jiān)測(cè)與漏播檢測(cè)的問題,設(shè)計(jì)了一種油菜播種監(jiān)測(cè)系統(tǒng),通過改變連接種子流傳感檢測(cè)模塊的數(shù)量,達(dá)到監(jiān)測(cè)不同作業(yè)幅寬的目的;姜萌等[20]針對(duì)化肥排施過程流量較大,化肥顆粒相互遮擋導(dǎo)致難以準(zhǔn)確檢測(cè)的問題,提出了基于光量阻擋原理的顆粒化肥流量檢測(cè)方法,該方法以顆粒流量與傳感器響應(yīng)電壓間的相關(guān)性為基礎(chǔ)建立檢測(cè)模型。上述研究表明,相關(guān)專家學(xué)者或機(jī)構(gòu)在監(jiān)測(cè)排種器是否發(fā)生漏播、堵塞以及種子在排種過程中難以兼容檢測(cè)的問題上研究較多,但對(duì)振動(dòng)環(huán)境下小粒徑油菜種子流快速檢測(cè)方法仍有待研究。
課題組前期研制了一種具有槽齒盤的油菜氣力式精量排種器,可滿足1~2粒油菜種子精量排種農(nóng)藝要求,但該排種器作業(yè)速度提高時(shí)存在排種頻率高、序列差、不易快速檢測(cè)導(dǎo)致檢測(cè)精度下降的問題。本文采用反射式光電感應(yīng)法設(shè)計(jì)一種光纖計(jì)數(shù)式油菜精量排種器種子流檢測(cè)系統(tǒng),實(shí)現(xiàn)種子流的實(shí)時(shí)計(jì)數(shù),并利用微計(jì)算機(jī)自動(dòng)數(shù)粒儀進(jìn)行同步檢測(cè)驗(yàn)證試驗(yàn),旨在驗(yàn)證該系統(tǒng)的檢測(cè)精度。
1 基于光纖計(jì)數(shù)的種子流檢測(cè)原理
1.1 傳感器檢測(cè)原理
傳感器主要采用CRS-602窗口型光纖傳感器,自帶的20 mm×20 mm正方形窗口為種子下落檢測(cè)區(qū)域,窗口內(nèi)側(cè)分別裝有光束信號(hào)發(fā)射端和接收端,且發(fā)射端和接收端位于同一側(cè)。傳感器通電工作時(shí),發(fā)射端通過發(fā)光二極管發(fā)射光束經(jīng)另一側(cè)鏡面反射回接收端的光敏元件上,此時(shí)內(nèi)部電路導(dǎo)通,輸出為高電平。當(dāng)油菜種子穿越落料窗口的檢測(cè)區(qū)域時(shí),會(huì)短暫遮擋發(fā)光二極管發(fā)出的光束,導(dǎo)致光敏元件無法接收到鏡面反射回來的光束,此時(shí)內(nèi)部電路為斷開狀態(tài),電勢(shì)發(fā)生改變并輸出為低電平,在此過程中,傳感器內(nèi)部電路由于電勢(shì)的改變會(huì)產(chǎn)生一個(gè)脈沖信號(hào),因此可通過檢測(cè)脈沖信號(hào)的數(shù)量得到下落種子流的種子數(shù)量。油菜種子流持續(xù)通過檢測(cè)區(qū)域時(shí),光敏元件間歇性地接收發(fā)光二極管發(fā)出的光而使電路間歇性地導(dǎo)通和斷開,電路間歇性地輸出高低電平,從而形成占空比不確定的脈沖信號(hào)波形,如圖1所示。
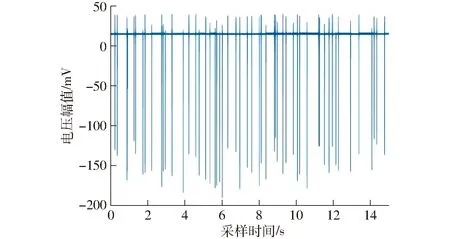
圖1 種子流采樣信號(hào)Fig.1 Seed flow sampling signal
為保證傳感器工作時(shí)不受光照及灰塵干擾,同時(shí)使得下落的種子流均能順利落至傳感器檢測(cè)區(qū)域中,設(shè)計(jì)了如圖2所示的傳感器連接裝置,連接裝置上部連接口與排種器落種管采用過盈配合相連,光纖傳感器從側(cè)部插入連接裝置的卡槽內(nèi),傳感器方形窗口檢測(cè)區(qū)域正好對(duì)應(yīng)上部的落種管中心,以便種子流能順利落至檢測(cè)區(qū)域內(nèi)。傳感器通過外部供電驅(qū)動(dòng)落料窗口發(fā)射光纖,使通過傳感裝置中的種子流被發(fā)射的光纖所感知。
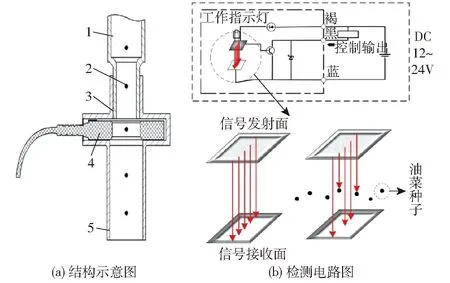
圖2 傳感器裝置示意圖Fig.2 Schematics of sensing device1.入種口 2.油菜種子 3.連接裝置 4.傳感器 5.出種口
1.2 檢測(cè)系統(tǒng)結(jié)構(gòu)及工作過程
檢測(cè)裝置以ZD/YH-XTP型六度空間振動(dòng)臺(tái)為基礎(chǔ),同時(shí)搭載多行排種裝置剛性臺(tái)架,臺(tái)架上方并排放置4個(gè)擾動(dòng)氣力式精量排種器,搭配永磁直流減速電機(jī)、驅(qū)動(dòng)軸、HG-1500-C2型漩渦式氣泵及管道。種子流檢測(cè)傳感器安裝于排種器投種口下方的導(dǎo)種管道上,檢測(cè)模塊整體放置在靠近導(dǎo)種管的一方,由2個(gè)12 V的鋰電池提供穩(wěn)定電壓,網(wǎng)頁終端模塊實(shí)時(shí)顯示在計(jì)算機(jī)屏幕上,整體結(jié)構(gòu)如圖3所示。
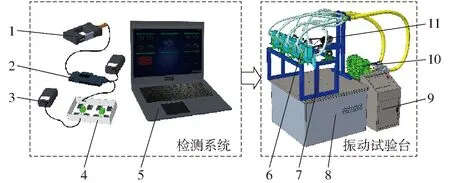
圖3 檢測(cè)系統(tǒng)結(jié)構(gòu)圖Fig.3 Detection system structure diagram1.檢測(cè)窗口 2.計(jì)數(shù)器 3.電源 4.核心檢測(cè)裝置 5.計(jì)算機(jī)終端 6.精量排種器 7.剛性臺(tái)架 8.六度空間振動(dòng)臺(tái) 9.控制臺(tái) 10.風(fēng)機(jī) 11.電機(jī)
該系統(tǒng)工作時(shí),傳感器的檢測(cè)窗口通過連接裝置固定在排種器投種口的正下方,此時(shí)傳感器一直處于高電平;當(dāng)油菜種子在穿過傳感器落料口時(shí),傳感器輸出電平立刻變?yōu)榈碗娖剑⑤敵鲆粋€(gè)脈沖信號(hào);在經(jīng)過DST-1R4C-N型電平轉(zhuǎn)換器降壓后,STM32單片機(jī)系統(tǒng)通過中斷程序采集到輸出脈沖信號(hào),此時(shí)單片機(jī)檢測(cè)的理論脈沖頻率經(jīng)WiFi模塊發(fā)送到網(wǎng)頁終端模塊的顯示屏上顯示各行播量。
1.3 響應(yīng)時(shí)間分析
為保證檢測(cè)系統(tǒng)的精度,需使油菜種子在通過傳感器時(shí)的信號(hào)被采集一次,因此傳感器最短響應(yīng)時(shí)間必須小于種子經(jīng)過傳感器時(shí)所需最短時(shí)間。種子通過傳感器時(shí)被采樣的約束條件為
Δt>ts
(1)
式中 Δt——種子經(jīng)過傳感器時(shí)所需時(shí)間,s
ts——傳感器最短響應(yīng)時(shí)間,s
對(duì)種子在導(dǎo)種管內(nèi)發(fā)生碰撞的過程進(jìn)行運(yùn)動(dòng)學(xué)分析,設(shè)油菜種子在導(dǎo)種管內(nèi)經(jīng)過A、D、E多點(diǎn)碰撞,然后通過傳感器。碰撞過程中,不僅油菜種子的速度損失較大且速度方向變化也較大,因此油菜種子到達(dá)傳感器上表面的速度變小且經(jīng)過傳感器的路徑變長,使得油菜種子經(jīng)過傳感器所需時(shí)間Δt變大,在此狀況下不易確定傳感器最短響應(yīng)時(shí)間ts。相比之下,若油菜種子剛好以拋物線運(yùn)動(dòng)形式穿過傳感器,此時(shí)油菜種子與導(dǎo)種管內(nèi)壁之間沒有碰撞,油菜種子動(dòng)能沒有損失,以最大速度通過傳感器,可得到極限時(shí)間Δt。此時(shí)Δt相比于所有油菜種子經(jīng)過傳感器的時(shí)間都要短,在此情況下油菜種子仍能被傳感器識(shí)別,則該傳感器符合檢測(cè)系統(tǒng)的要求。
圖4為種子與導(dǎo)種管碰撞時(shí)的運(yùn)動(dòng)分析圖,油菜種子在管徑長度x1橫向位移中,只能到達(dá)點(diǎn)P,然后沿著拋物線運(yùn)動(dòng)到達(dá)點(diǎn)A,但無法直接到達(dá)點(diǎn)E。若不考慮管壁的阻礙作用,油菜種子在到達(dá)點(diǎn)A后繼續(xù)以拋物線運(yùn)動(dòng),最終經(jīng)過傳感器的上表面B和下表面C,此時(shí)油菜種子所獲得速度最大,經(jīng)過傳感器為最短時(shí)間Δt。
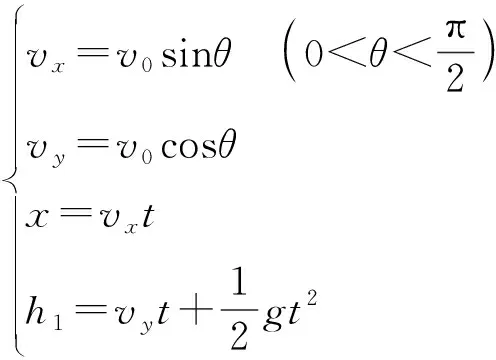
(2)
式中v0——種子下落至斜面板頂端的初速度,m/s
θ——種子下落方向與豎直方向的夾角,(°)
x——斜面板頂端至底端的水平距離,mm
t——種子從斜面板頂端下落至底端所用的時(shí)間,s
h1——種子從投種口到進(jìn)管口距離,mm
vx——種子碰撞到斜面后橫向分速度,m/s
vy——種子碰撞到斜面后縱向分速度,m/s
g——重力加速度,取9.8 m/s2
解得
(3)
將已知參數(shù)代入式(3)可得
(4)
由式(4)可得
(5)
即
(6)
由于該方程較為復(fù)雜,不易采用傳統(tǒng)方式求解,采用Matlab數(shù)形結(jié)合的方法對(duì)式(6)進(jìn)行求解,結(jié)果如圖5所示。得出Y0與Y1交點(diǎn)的橫坐標(biāo),在x范圍內(nèi)解得交點(diǎn)橫坐標(biāo)為
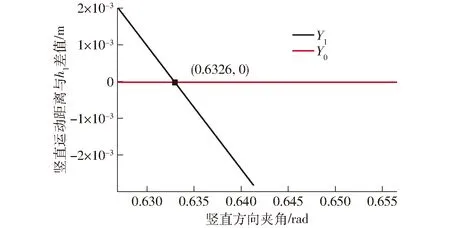
圖5 函數(shù)曲線Fig.5 Function curve
θ=36.264°=0.632 6 rad
為減少種子與導(dǎo)種管壁接觸碰撞能量損失,投送的種子與管壁在點(diǎn)O碰撞并經(jīng)過點(diǎn)P、A、B、C后離開監(jiān)測(cè)窗口,可得
(7)
式中n——種盤轉(zhuǎn)速,r/min
r——種盤半徑,mmβ——投種角,(°)
H1——種子從投種口到傳感器進(jìn)口距離,mm
H2——種子從投種口到傳感器出口距離,mm
T1——種子從投種口到傳感器進(jìn)口時(shí)間,s
T2——種子從投種口到傳感器出口時(shí)間,s
ΔT——種子通過傳感器極限時(shí)間,s
由式(7)可解得
(8)
得
ΔT=T2(n)-T1(n)
(9)
根據(jù)前期預(yù)試驗(yàn),可得種盤轉(zhuǎn)速n與響應(yīng)精度P對(duì)應(yīng)關(guān)系,采用Matlab多項(xiàng)式離散點(diǎn)擬合可得
n=kP+b
(10)
根據(jù)95%置信區(qū)間k∈[-0.02,0.108],取中值k=0.043 75;根據(jù)95%置信區(qū)間b∈[-1.46,4.087],取中值b=1.313。
聯(lián)立式(9)、(10)可得響應(yīng)時(shí)間與檢測(cè)精度之間的數(shù)值關(guān)系規(guī)律為
ΔT=T2(0.043 75P+1.313)-
T1(0.043 75P+1.313)
(11)
由式(8)、(10)分析可得,式(11)為單調(diào)遞減函數(shù),即傳感器響應(yīng)時(shí)間越快,精度越高。
所設(shè)計(jì)的油菜氣力式精量排種器工作轉(zhuǎn)速n∈[20 r/min,60 r/min]可滿足實(shí)際田間播種需要[21],將其代入式(8)、(11),可得油菜種子穿越響應(yīng)時(shí)間為2.68~8.36 ms,為確保檢測(cè)系統(tǒng)的精度,設(shè)定光纖傳感器響應(yīng)時(shí)間為2 ms。
2 檢測(cè)系統(tǒng)設(shè)計(jì)
2.1 硬件選型及設(shè)計(jì)
在ARM嵌入式系統(tǒng)框架中主要分為硬件設(shè)備與軟件設(shè)計(jì)兩部分,分別實(shí)現(xiàn)對(duì)排種器各行排量及其各行排量一致性變異系數(shù)的信息采集、儲(chǔ)存、通信以及實(shí)時(shí)顯示,由主程序調(diào)用若干子程序?qū)崿F(xiàn)多行種子流實(shí)時(shí)檢測(cè)。硬件包括信號(hào)采集模塊、核心控制模塊、無線通信模塊、檢測(cè)顯示終端模塊、網(wǎng)頁監(jiān)測(cè)模塊以及電源模塊。檢測(cè)系統(tǒng)框圖如圖6所示。
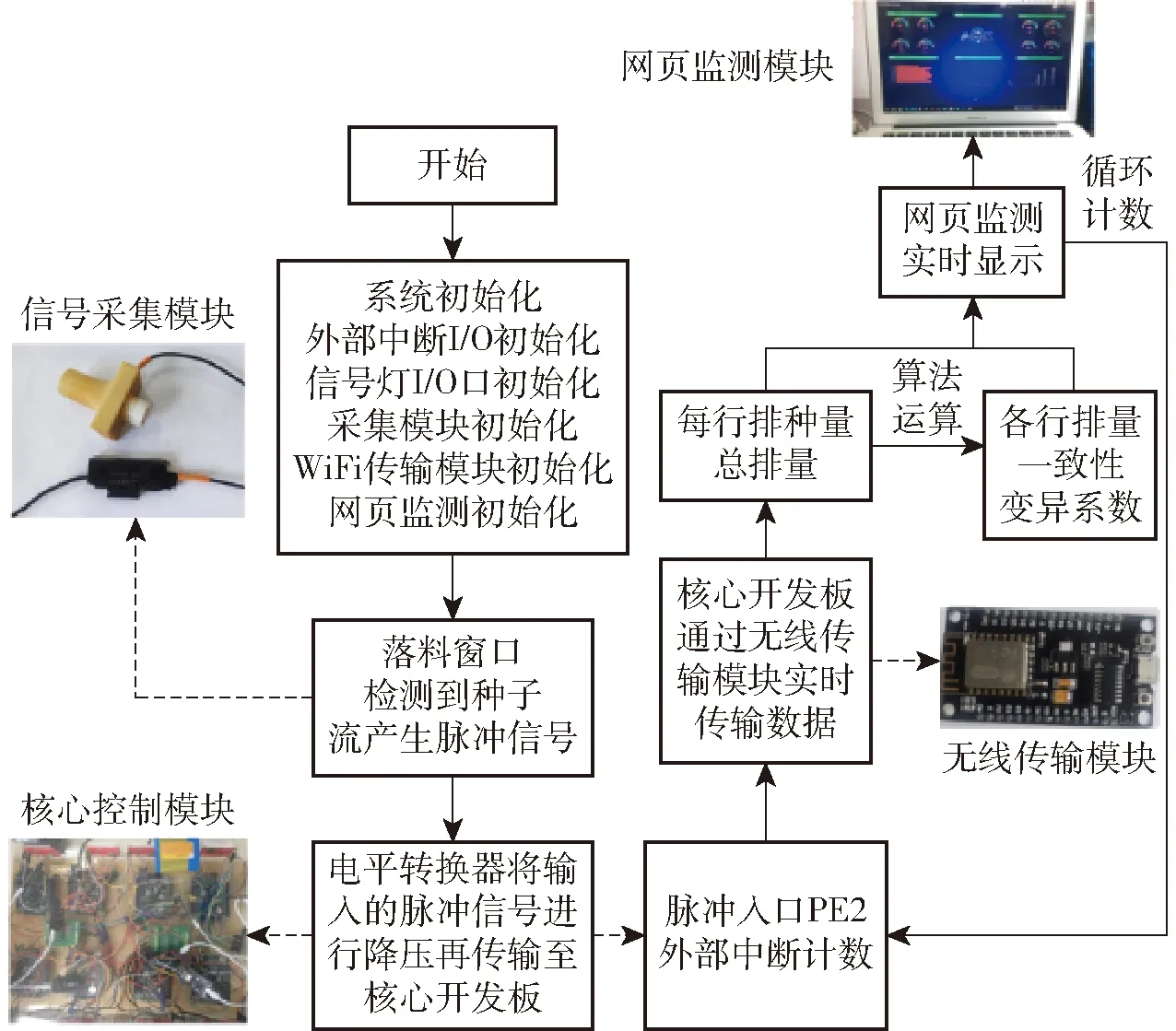
圖6 種子流檢測(cè)系統(tǒng)框圖Fig.6 Seed flow detection system frame diagram
核心控制模塊采用STM32F407VET6處理器,具有單周期DSP指令,內(nèi)核為Cortex-M4/32bit RISC,其主要通過PE2口的外部中斷功能采集輸出脈沖頻率,為避免信號(hào)在傳輸中出現(xiàn)延時(shí)傳輸、遺漏的現(xiàn)象,同時(shí)提高數(shù)據(jù)傳輸?shù)臏?zhǔn)確度及實(shí)時(shí)性,因此核心控制模塊每行需對(duì)應(yīng)一個(gè)STM32F407VET6型號(hào)的單片機(jī)控制器;無線通信模塊使用ESP8266串口WiFi模塊實(shí)現(xiàn)核心控制模塊與網(wǎng)頁監(jiān)測(cè)模塊的無線通信,該模塊核心程序主要通過Arduino軟件實(shí)現(xiàn),響應(yīng)時(shí)間短、損耗低,通過提前設(shè)定程序連接WiFi并實(shí)現(xiàn)八對(duì)一的無堵塞式無線傳輸模式;網(wǎng)頁終端模塊以計(jì)算機(jī)為基礎(chǔ)同時(shí)基于Pygame庫對(duì)圖形界面進(jìn)行設(shè)計(jì)與編寫,用于顯示各行播量信息以及檢測(cè)系統(tǒng)實(shí)時(shí)作業(yè)狀態(tài);電源模塊主要由3個(gè)12 V、1 A的鋰電池組成,通過USB數(shù)據(jù)線分別給不同的模塊供電。
2.2 電路設(shè)計(jì)
為實(shí)現(xiàn)核心控制模塊對(duì)多路種子流的同步檢測(cè),采用“一對(duì)一”數(shù)據(jù)獨(dú)立傳輸方式,每一路種子流的檢測(cè)分別對(duì)應(yīng)一個(gè)核心控制模塊,對(duì)外部中斷入口PE2進(jìn)行監(jiān)聽,可實(shí)現(xiàn)每路數(shù)據(jù)單獨(dú)接收與發(fā)送。避免因排種速度的增大導(dǎo)致核心控制模塊響應(yīng)時(shí)間較長、檢測(cè)精度下降進(jìn)而造成數(shù)據(jù)在接收與發(fā)送過程中延遲和丟失。同時(shí)針對(duì)江淮地區(qū)遲收糯稻茬田下油菜精量直播機(jī)多采用八行進(jìn)行直播的問題,采用“多合一”并聯(lián)模式將每一路核心控制模塊的數(shù)據(jù)集成顯示在網(wǎng)頁監(jiān)測(cè)終端,各電路示意圖如圖7所示。
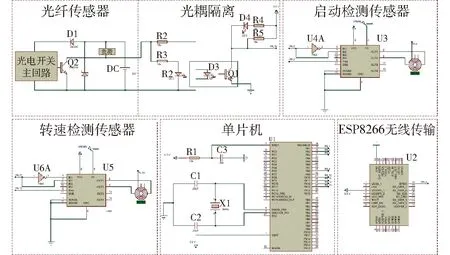
圖7 電路示意圖Fig.7 Row circuit diagram
2.3 控制運(yùn)算
檢測(cè)系統(tǒng)初始化后,種子流通過光纖傳感器檢測(cè)窗口并產(chǎn)生脈沖信號(hào),同時(shí)調(diào)用外部定時(shí)中斷資源采集來自光耦隔離器降壓處理后的每行種子流的排種頻率,進(jìn)而實(shí)現(xiàn)各行種子流的同步檢測(cè);網(wǎng)頁監(jiān)測(cè)模塊通過八行的排種量計(jì)算得出各行排量一致性變異系數(shù),并最終在終端上實(shí)時(shí)顯示。檢測(cè)系統(tǒng)程序流程如圖8所示。
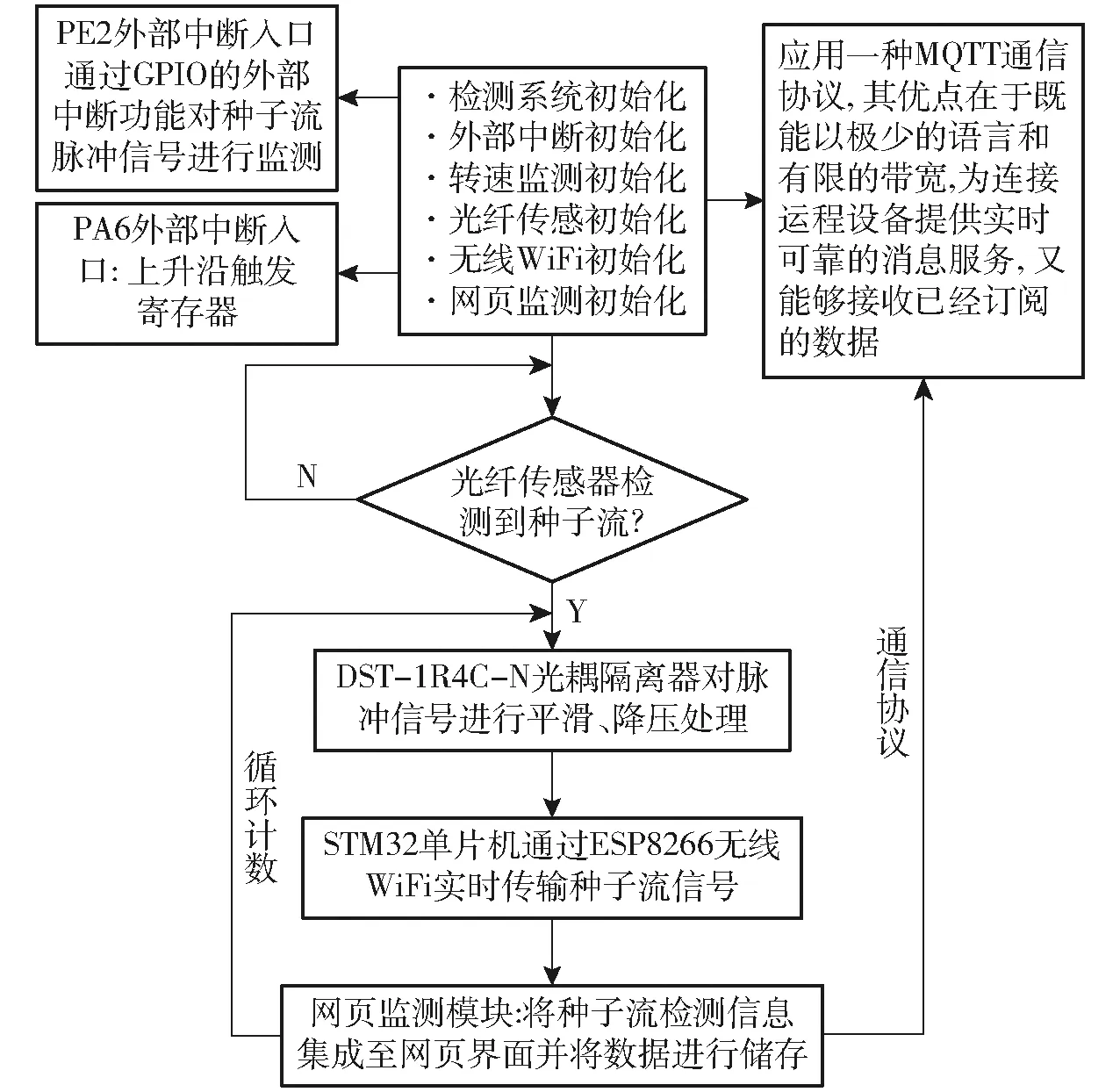
圖8 檢測(cè)系統(tǒng)程序流程圖Fig.8 Flow chart of detection system program
假設(shè)檢測(cè)系統(tǒng)在一個(gè)檢測(cè)周期內(nèi)光纖感應(yīng)的次數(shù)為X,核心控制器通過降壓模塊采集到脈沖信號(hào)次數(shù),并計(jì)算出每行種子流排種粒數(shù)xi和各行排量一致性變異系數(shù)。
3 試驗(yàn)驗(yàn)證
3.1 傳感器精度試驗(yàn)
為驗(yàn)證該檢測(cè)系統(tǒng)對(duì)小粒徑油菜種子的檢測(cè)精度,選用華油雜62油菜以單、雙粒形式通過傳感器進(jìn)行試驗(yàn)驗(yàn)證。試驗(yàn)方法如下:通過SLY-C型微計(jì)算機(jī)自動(dòng)數(shù)粒儀帶動(dòng)小型數(shù)粒盤轉(zhuǎn)動(dòng),此時(shí)手動(dòng)將種子采用一粒或雙粒形式放入數(shù)粒盤中,通過調(diào)節(jié)微計(jì)算機(jī)自動(dòng)數(shù)粒儀不同的檔位模擬不同下落速度下種子檢測(cè)情況。數(shù)粒盤的轉(zhuǎn)動(dòng)帶動(dòng)油菜種子以一定的時(shí)間間隔依次通過光纖傳感器,在傳感器下方放置油菜種子接收盒。光纖傳感器將采集的信號(hào)傳給上位機(jī),上位機(jī)對(duì)采樣的數(shù)據(jù)進(jìn)行分析處理,得到理論油菜籽粒數(shù),人工統(tǒng)計(jì)接收盒里面的油菜種子得到實(shí)際籽粒數(shù),每次試驗(yàn)3 min并重復(fù)3次取平均值,通過理論籽粒數(shù)和實(shí)際籽粒數(shù)計(jì)算出該檢測(cè)系統(tǒng)的檢測(cè)精度。
由圖9可知,當(dāng)單粒油菜種子以不同下落速度通過光纖傳感器時(shí),其檢測(cè)系統(tǒng)具有較高的檢測(cè)精度,且隨著下落速度的提高檢測(cè)相對(duì)偏差緩慢增加,相對(duì)偏差最大為2.21%;當(dāng)雙粒油菜種子以不同下落速度通過光纖傳感器時(shí),隨著下落速度的提高相對(duì)偏差也隨之緩慢增加,且相對(duì)偏差最大為3.67%。分析其原因可知,隨著種子下落速度不斷增大,種子通過檢測(cè)系統(tǒng)的時(shí)間不斷減小以致于出現(xiàn)漏檢的情況,從而導(dǎo)致相對(duì)偏差不斷增大;而在兩粒種子通過檢測(cè)系統(tǒng)的同時(shí),不僅有下落速度對(duì)檢測(cè)誤差的影響,且多粒種子產(chǎn)生的信號(hào)易發(fā)生混疊漏計(jì),導(dǎo)致相對(duì)偏差呈上升趨勢(shì)。雙粒檢測(cè)試驗(yàn)結(jié)果相對(duì)偏差大于單粒試驗(yàn)結(jié)果相對(duì)偏差,但總體偏差仍相對(duì)較小,表明傳感器的精度能滿足本文試驗(yàn)要求。
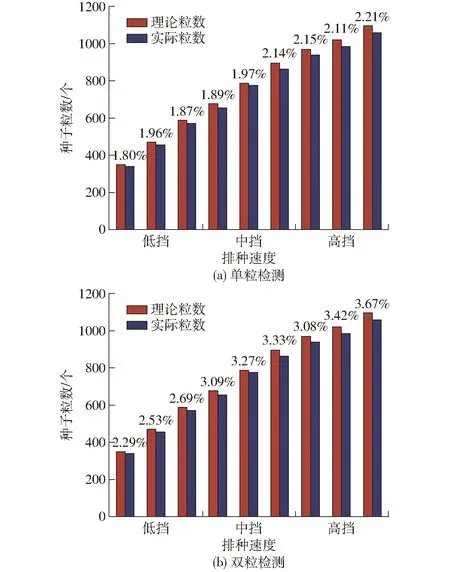
圖9 傳感器精度試驗(yàn)結(jié)果Fig.9 Sensor accuracy test results
3.2 檢測(cè)系統(tǒng)性能試驗(yàn)
3.2.1試驗(yàn)設(shè)備與材料
以湖北國科高新技術(shù)有限公司生產(chǎn)的華油雜62油菜種子為試驗(yàn)材料,其材料特性[22]如下:千粒質(zhì)量為4.4 g,含水率為7.6%,球形度為91.5%。
臺(tái)架試驗(yàn)設(shè)備主要有:氣力式精量排種器、ZD/YH-XTP型六度空間振動(dòng)臺(tái)、YVF2-802-4型三相異步變頻電機(jī)(日本三菱電機(jī)股份有限公司)、VC6236P型轉(zhuǎn)速表、SG-312型風(fēng)量風(fēng)壓計(jì)、計(jì)時(shí)器、接種杯、SLY-C型微計(jì)算機(jī)自動(dòng)數(shù)粒儀(浙江托普儀器有限公司)、種子流檢測(cè)系統(tǒng),如圖10所示。
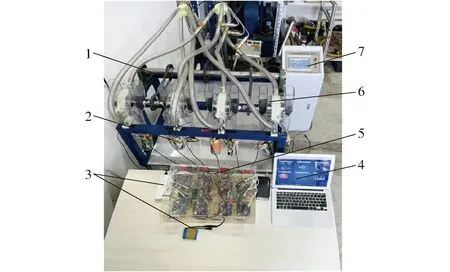
圖10 多行振動(dòng)檢測(cè)試驗(yàn)裝置Fig.10 Multi-row vibration detection test device1.驅(qū)動(dòng)軸 2.接種杯 3.移動(dòng)電源 4.網(wǎng)頁終端模塊 5.核心控制模塊 6.氣力式精量排種器 7.振動(dòng)控制臺(tái)
3.2.2試驗(yàn)設(shè)計(jì)與方法
實(shí)際田間工況主要參數(shù):土壤類型為黃棕壤,土壤堅(jiān)實(shí)度為544.53~848.44 kPa,水稻留茬高度為300~350 mm,稻茬覆蓋量為0.82~1.24 kg/m2,土壤含水率為24.67%~30.12%。
試驗(yàn)時(shí),2BQFX-8型油菜精量聯(lián)合播種機(jī)由東方紅LY-1204D型輪式拖拉機(jī)提供動(dòng)力。采用單因素試驗(yàn)方法,測(cè)定機(jī)組前進(jìn)速度分別為慢Ⅰ擋(2.6 km/h)、慢Ⅱ擋(3.3 km/h)、 慢Ⅲ擋(4.5 km/h) 作業(yè)時(shí)的振動(dòng)特性。試驗(yàn)前,將播種機(jī)調(diào)整至正常工作狀態(tài),播種深度0~30 mm。為獲取油菜田間播種時(shí)排種系統(tǒng)的振動(dòng)特性,根據(jù)已有研究[23-24],排種系統(tǒng)受到豎直方向振動(dòng)為主。本研究使用PCB356A32型三軸加速度傳感器對(duì)排種裝置豎直方向進(jìn)行振動(dòng)信號(hào)采集,試驗(yàn)前將傳感器固定在排種裝置上,采用NI-9234采集卡采集加速度時(shí)域信號(hào)并通過LabVIEW顯示與儲(chǔ)存,在LabVIEW軟件前面板設(shè)置連續(xù)采樣頻率為2 500 Hz,采集振動(dòng)信號(hào)15 s,將采集時(shí)頻數(shù)據(jù)導(dǎo)入Matlab中進(jìn)行傅里葉頻域轉(zhuǎn)換,得到振動(dòng)頻率與振動(dòng)加速度間對(duì)應(yīng)關(guān)系的頻域信號(hào)如圖11所示,左邊為振動(dòng)時(shí)域圖,右邊為振動(dòng)頻域圖。
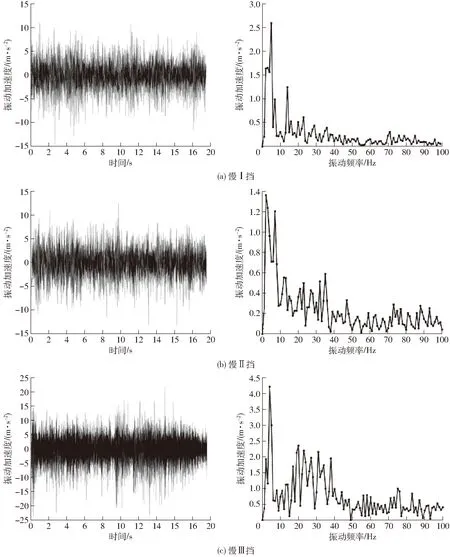
圖11 機(jī)組振動(dòng)加速度曲線Fig.11 Vibration acceleration analysis of unit
由頻域圖可知,播種機(jī)振動(dòng)能量的頻率分布主要集中在低頻段的 3~10 Hz。前進(jìn)速度越大,振動(dòng)越劇烈,但不影響振動(dòng)能量的頻率分布。為對(duì)比靜態(tài)環(huán)境與振動(dòng)環(huán)境下播量檢測(cè)性能,臺(tái)架性能試驗(yàn)設(shè)定振動(dòng)頻率為0~10 Hz,取0、5、10 Hz 3個(gè)梯度,振動(dòng)控制臺(tái)參數(shù)設(shè)置如圖12所示。
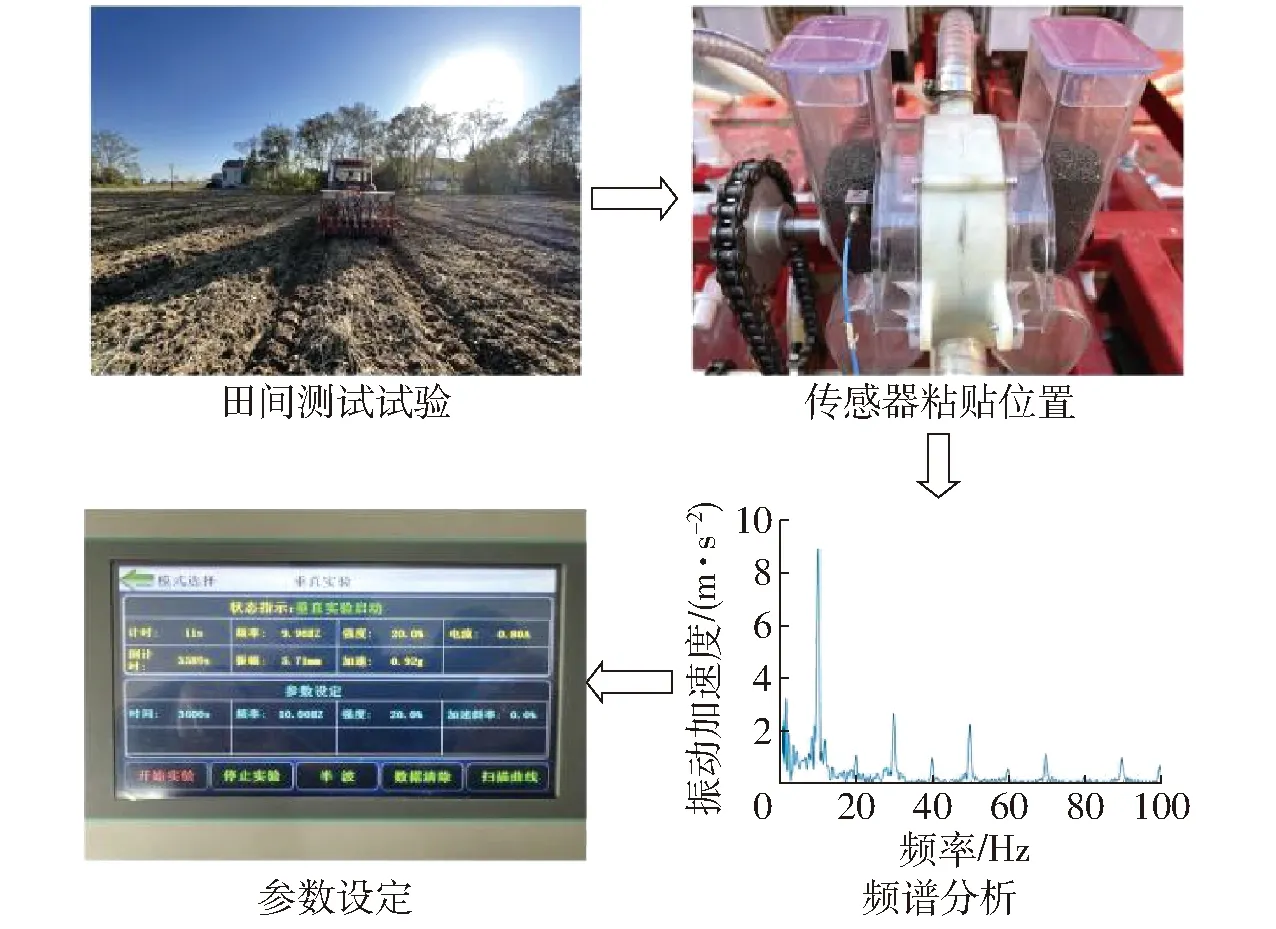
圖12 振動(dòng)分析圖Fig.12 Vibration analysis diagram
播種機(jī)組實(shí)際作業(yè)過程中并非勻速前行,風(fēng)壓難以保持恒定且很難找出其變化規(guī)律,臺(tái)架試驗(yàn)不易還原田間實(shí)時(shí)工作風(fēng)壓。根據(jù)前期研究[25],種盤靜止(待轉(zhuǎn)動(dòng))狀態(tài)下的工作負(fù)壓1 500~2 500 Pa可滿足油菜多路排種時(shí)對(duì)種子精量吸附的實(shí)際需要。試驗(yàn)中利用電動(dòng)閥門控制風(fēng)泵出口的工作負(fù)壓,試驗(yàn)前開展靜態(tài)工作負(fù)壓與閥門開度匹配試驗(yàn),靜態(tài)工作負(fù)壓波動(dòng)較小,以SG-312型風(fēng)量風(fēng)壓計(jì)測(cè)量數(shù)據(jù)作為實(shí)測(cè)值,通過更改電動(dòng)閥門的輸入電壓來控制閥門開度,輸入電壓從0 V到10 V,每次增加0.5 V,記錄電動(dòng)閥門實(shí)際開度和靜態(tài)工作負(fù)壓,其負(fù)壓取3 min內(nèi)的均值,試驗(yàn)重復(fù)3次,結(jié)果如圖13所示。
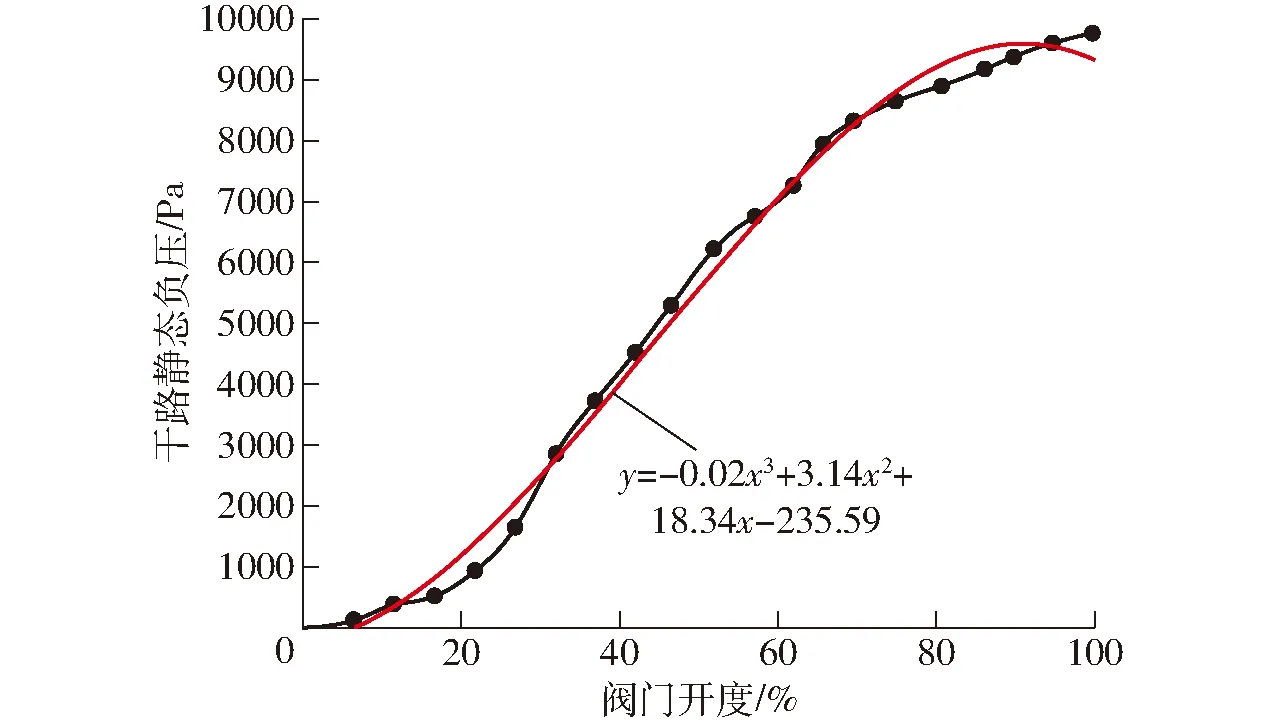
圖13 閥門特性曲線與擬合方程Fig.13 Valve characteristic curves and fitting equation
利用Origin軟件對(duì)圖13結(jié)果進(jìn)行多項(xiàng)式擬合,得到曲線方程為:y=-0.02x3+3.14x2+18.34x-235.59,其模型決定系數(shù)R2為0.993 9,表明擬合模型顯著。根據(jù)擬合曲線方程計(jì)算靜態(tài)工作負(fù)壓為1 500~2 500 Pa時(shí)的閥門開度。
檢測(cè)系統(tǒng)初始化,啟動(dòng)ZD/YH-XTP型六度空間振動(dòng)臺(tái)電源,通過更改電動(dòng)閥門的輸入電壓來控制閥門開度改變工作負(fù)壓,啟動(dòng)YVF2-802-4型三相異步變頻電機(jī),利用VC6236P型轉(zhuǎn)速表測(cè)定所需種盤轉(zhuǎn)速。當(dāng)振動(dòng)排種系統(tǒng)穩(wěn)定工作后,利用研制的檢測(cè)系統(tǒng)同步測(cè)定排種系統(tǒng)每一個(gè)導(dǎo)種口排出的種子數(shù)量并在上位機(jī)上實(shí)時(shí)顯示各行的排種數(shù)量和各行排量一致性變異系數(shù),同時(shí)在每一個(gè)檢測(cè)的導(dǎo)種口處都放置一個(gè)接種杯,再利用SLY-C型微計(jì)算機(jī)自動(dòng)數(shù)粒儀測(cè)定出對(duì)應(yīng)的每一個(gè)導(dǎo)種口排出的種子數(shù)量和各行排量一致性變異系數(shù),檢測(cè)時(shí)間設(shè)定30 s,每組試驗(yàn)重復(fù)3次[26]。根據(jù)表1中的因素水平依次更換振動(dòng)頻率、種盤轉(zhuǎn)速及工作負(fù)壓,重復(fù)以上步驟直至完成試驗(yàn)并計(jì)算出檢測(cè)值與實(shí)際值的相對(duì)偏差。
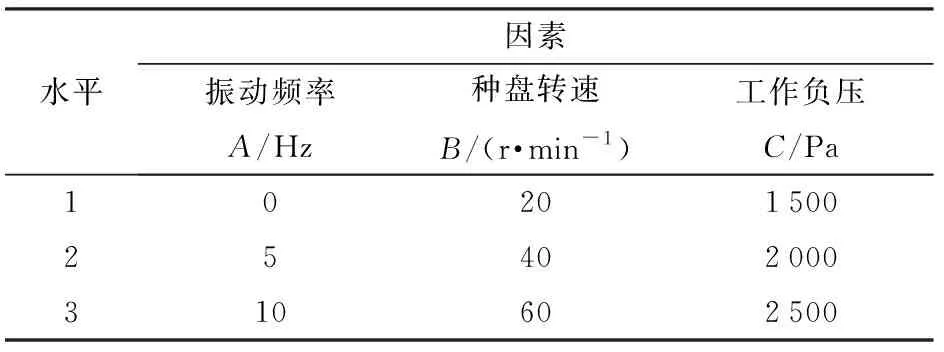
表1 試驗(yàn)因素水平Tab.1 Test factors level
通過檢測(cè)系統(tǒng)得到實(shí)際值與各行排量一致性變異系數(shù)并結(jié)合SLY-C型微計(jì)算機(jī)自動(dòng)數(shù)粒儀記錄下每行實(shí)際值以及相對(duì)的各行排量一致性變異系數(shù)。相關(guān)試驗(yàn)評(píng)價(jià)指標(biāo)計(jì)算公式[27-28]為
(12)
式中Ec——相對(duì)偏差,%
Gc——檢測(cè)到的種子數(shù)量,個(gè)
Cc——經(jīng)過數(shù)粒儀檢測(cè)后得出種子數(shù)量,個(gè)
3.2.3結(jié)果與分析
采取Box-Behnken響應(yīng)面分析法進(jìn)行三因素三水平正交試驗(yàn),重復(fù)以上步驟直至完成試驗(yàn)并計(jì)算出檢測(cè)值與實(shí)際值的相對(duì)偏差。試驗(yàn)結(jié)果如表2所示。
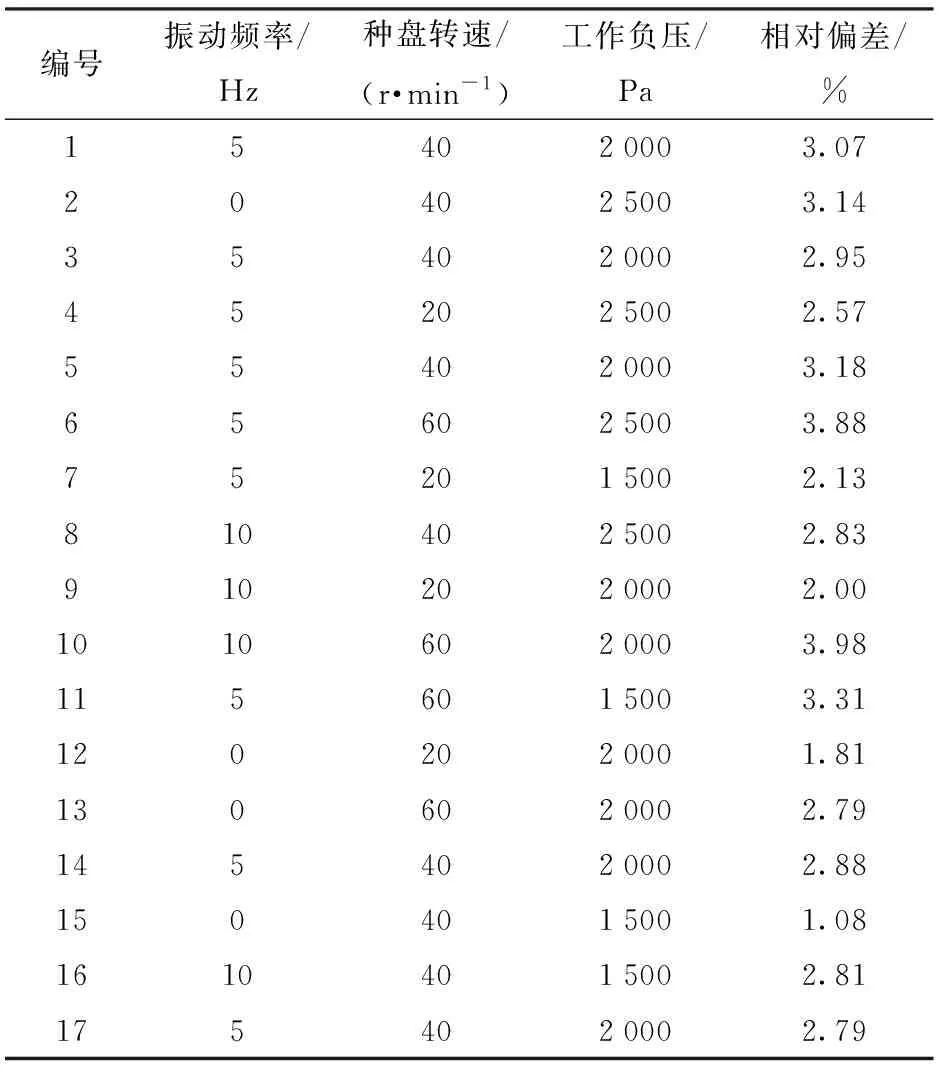
表2 試驗(yàn)結(jié)果Tab.2 Test results
對(duì)實(shí)際值與檢測(cè)值之間的相對(duì)偏差進(jìn)行方差分析,結(jié)果如表3所示。由表3可知,振動(dòng)頻率、種盤轉(zhuǎn)速和工作負(fù)壓3個(gè)單因素對(duì)各行排種量的相對(duì)偏差均是極顯著影響,振動(dòng)頻率、種盤轉(zhuǎn)速、振動(dòng)頻率與工作負(fù)壓兩兩交互對(duì)各行排種量的相對(duì)偏差的影響均顯著,但工作負(fù)壓與種盤轉(zhuǎn)速間的交互對(duì)各行排種量相對(duì)偏差的影響為不顯著。分析其原因在于振動(dòng)頻率打破了種子流有序的投送狀態(tài),種盤轉(zhuǎn)速的增大則是在單位時(shí)間內(nèi)增加了種子數(shù)量,工作負(fù)壓的變化則是使得排種器在吸種過程中增大了重吸或漏吸的概率。
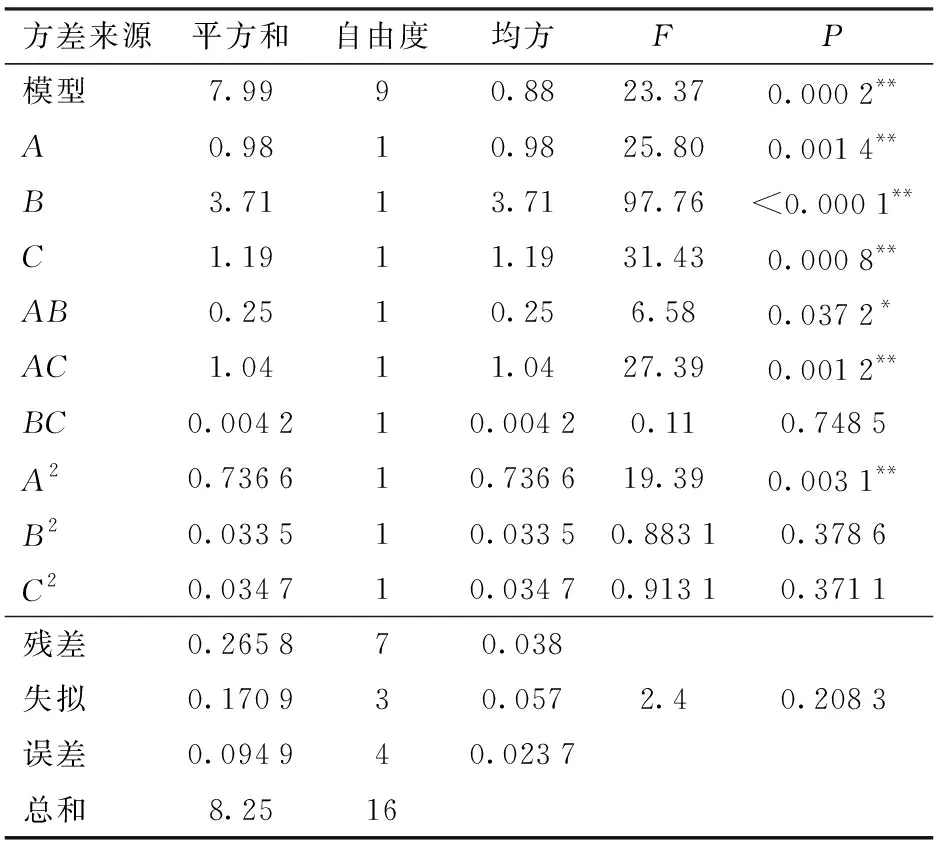
表3 方差分析Tab.3 Variance analysis
對(duì)于相對(duì)偏差,振動(dòng)頻率與種盤轉(zhuǎn)速的交互作用響應(yīng)曲面如圖14a所示。當(dāng)振動(dòng)頻率一定時(shí),相對(duì)偏差隨著種盤轉(zhuǎn)速的增加呈現(xiàn)增大趨勢(shì),原因是隨著轉(zhuǎn)速的增大,相同時(shí)間內(nèi)通過傳感器檢測(cè)窗口的種子流數(shù)量增大,從而提升各行排種量的相對(duì)偏差;當(dāng)種盤轉(zhuǎn)速一定時(shí),相對(duì)偏差隨著振動(dòng)頻率的增大而增大,但變化趨勢(shì)沒有種盤轉(zhuǎn)速顯著。在振動(dòng)頻率與種盤轉(zhuǎn)速的交互作用中,主要影響相對(duì)偏差的因素是種盤轉(zhuǎn)速。振動(dòng)頻率與工作負(fù)壓的交互作用響應(yīng)曲面如圖14b所示。當(dāng)工作負(fù)壓一定時(shí),相對(duì)偏差隨著振動(dòng)頻率的增加呈現(xiàn)增大趨勢(shì),原因是隨著頻率的增大,對(duì)排種過程中種子的排種序列產(chǎn)生一定影響,打破了靜態(tài)環(huán)境排種下種子流有序投送狀態(tài),當(dāng)振動(dòng)頻率一定時(shí),工作負(fù)壓對(duì)相對(duì)偏差產(chǎn)生的影響趨勢(shì)平緩,影響效果相對(duì)不顯著。
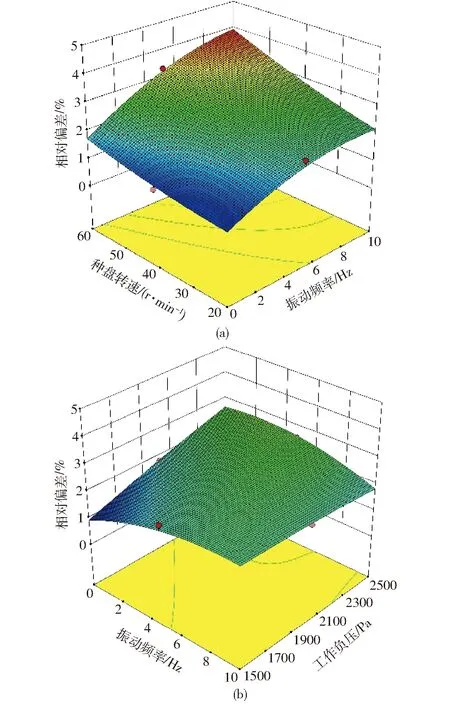
圖14 不同工況下各行排種量的相對(duì)偏差Fig.14 Relative deviation of seed quantity of each row under different working conditions
各行排量一致性變異系數(shù)檢測(cè)試驗(yàn)結(jié)果如圖15所示。試驗(yàn)結(jié)果表明,在不同的振動(dòng)環(huán)境下,隨著種盤轉(zhuǎn)速和工作負(fù)壓的提高,各行排量一致性變異系數(shù)的檢測(cè)值與實(shí)際值相對(duì)偏差均不超過1.0%。其原因?yàn)閷?duì)于振動(dòng)環(huán)境下油菜氣力式精量排種器的各行排量一致性變異系數(shù)較低,檢測(cè)系統(tǒng)測(cè)得其各行排量一致性變異系數(shù)也較低,因此其相對(duì)偏差小。由此驗(yàn)證了該檢測(cè)系統(tǒng)可用于振動(dòng)環(huán)境下油菜氣力式排種器種子流的實(shí)時(shí)檢測(cè)。

圖15 不同工況下各行排量一致性變異系數(shù)的相對(duì)偏差Fig.15 Relative deviation of coefficient of variation of displacement consistency of each row under different working conditions
4 田間試驗(yàn)
4.1 試驗(yàn)設(shè)備與方法
田間播種作業(yè)因拖拉機(jī)動(dòng)力、旋耕刀輥與土壤秸稈耦合作用等激勵(lì)產(chǎn)生振動(dòng),種子流檢測(cè)精度受振動(dòng)頻率和幅度影響,且振動(dòng)幅度對(duì)其影響較大。臺(tái)架試驗(yàn)中使用全功能微計(jì)算機(jī)控制振動(dòng)試驗(yàn)臺(tái),其工作要求為:振頻小于50 Hz,振幅不得超過5 mm,無法復(fù)制田間實(shí)際振動(dòng)幅度,需通過田間試驗(yàn)進(jìn)一步驗(yàn)證其檢測(cè)系統(tǒng)的可行性,于2021年11月10日在安徽省安慶市懷寧縣石牌鎮(zhèn)開展田間試驗(yàn)。
試驗(yàn)設(shè)備為湖北樺磊農(nóng)機(jī)制造有限公司生產(chǎn)的2BQFX-8型油菜精量播種機(jī)(搭載擾動(dòng)氣力式精量排種器)、東方紅LY-1204D型輪式拖拉機(jī)、種子流檢測(cè)裝置、接種袋等。
為進(jìn)一步檢驗(yàn)該檢測(cè)裝置在田間振動(dòng)下的檢測(cè)效果,試驗(yàn)過程中給檢測(cè)裝置及終端進(jìn)行穩(wěn)定供電并將裝置初始化,設(shè)置拖拉機(jī)3個(gè)前進(jìn)速度分別為2.6 km/h(慢Ⅰ擋)、3.3 km/h(慢Ⅱ擋)、4.5 km/h(慢Ⅲ擋),對(duì)應(yīng)種盤轉(zhuǎn)速分別為22、30、41 r/min,均為適宜江淮區(qū)域油菜直播作業(yè)擋位[29]。設(shè)定機(jī)具行駛距離為40 m,并用接種袋收集從導(dǎo)種口排出的油菜種子流,再利用SLY-C型微計(jì)算機(jī)自動(dòng)數(shù)粒儀測(cè)定出對(duì)應(yīng)的每一個(gè)導(dǎo)種口排出的種子數(shù)量和各行排量一致性變異系數(shù),每組試驗(yàn)重復(fù)3次。試驗(yàn)現(xiàn)場(chǎng)如圖16所示。

圖16 田間排種試驗(yàn)Fig.16 Field seeding test1.東方紅LY-1204D型輪式拖拉機(jī) 2.2BQFX-8型油菜精量播種機(jī) 3.接種袋 4.氣力式精量排種器 5.種子流檢測(cè)系統(tǒng) 6.網(wǎng)頁顯示終端
4.2 試驗(yàn)結(jié)果分析
由表4可以看出,實(shí)際排種量比檢測(cè)播種量整體偏大,二者相對(duì)偏差小于8.0%,但該結(jié)果略高于臺(tái)架試驗(yàn)結(jié)果。主要原因?yàn)椋和侠瓩C(jī)田間工作時(shí),振動(dòng)幅度較大,多粒種子同時(shí)下落時(shí)被檢測(cè)系統(tǒng)計(jì)為一個(gè)脈沖數(shù)據(jù),導(dǎo)致了排種檢測(cè)值整體偏小。在符合農(nóng)藝要求的油菜播量下,結(jié)合機(jī)具前進(jìn)速度,在播種機(jī)正常工作的速度區(qū)間范圍內(nèi),種子流檢測(cè)系統(tǒng)在田間工作穩(wěn)定、試驗(yàn)可靠。種子流傳感系統(tǒng)和網(wǎng)頁顯示端處于密封狀態(tài),田間的泥土和粉塵等并不會(huì)對(duì)種子流檢測(cè)系統(tǒng)造成影響。
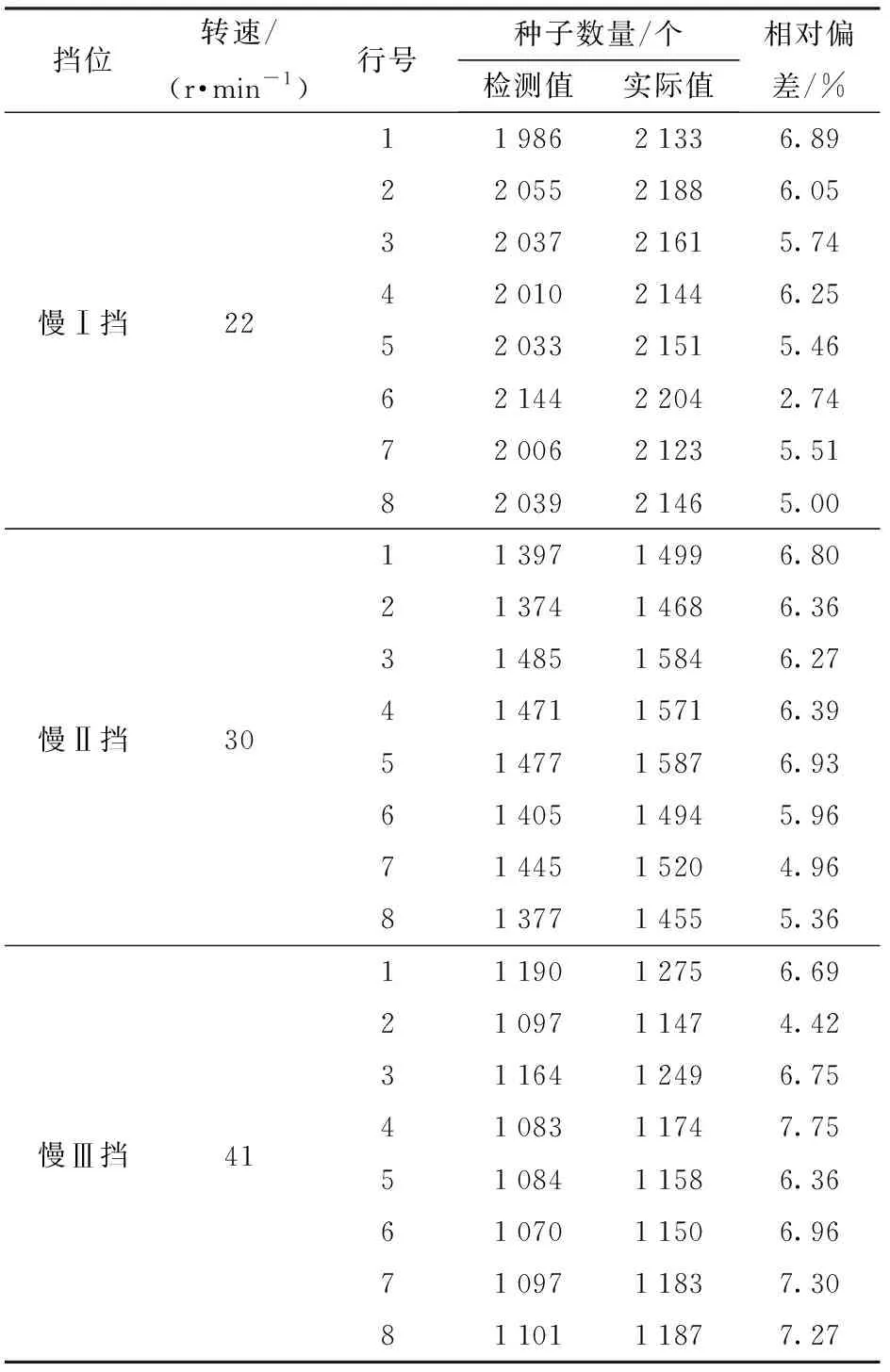
表4 油菜種子流檢測(cè)系統(tǒng)田間試驗(yàn)結(jié)果Tab.4 Field test results of rapeseed seed flow detection system
5 結(jié)論
(1)基于反射式光電感應(yīng)法設(shè)計(jì)一種光纖計(jì)數(shù)式油菜精量排種器種子流檢測(cè)系統(tǒng),由光纖計(jì)數(shù)式傳感器、核心控制模塊、降壓模塊、無線通信模塊和網(wǎng)頁終端組成,檢測(cè)系統(tǒng)在Android軟件的基礎(chǔ)上實(shí)現(xiàn)了多行種子流信息的實(shí)時(shí)傳輸與顯示。
(2)通過搭建的振動(dòng)試驗(yàn)臺(tái)測(cè)得,振動(dòng)頻率、種盤轉(zhuǎn)速、工作負(fù)壓對(duì)檢測(cè)精度均有顯著影響,試驗(yàn)因素對(duì)種子流檢測(cè)性能影響的主次順序?yàn)榉N盤轉(zhuǎn)速、工作負(fù)壓、振動(dòng)頻率;各行排種量實(shí)際值與檢測(cè)值的相對(duì)偏差不超過4.0%,各行排量一致性變異系數(shù)的檢測(cè)值與實(shí)際值的相對(duì)偏差不超過1.0%。
(3)田間試驗(yàn)得出,受機(jī)組振動(dòng)、顛簸等綜合因素作用下,實(shí)際各行播種量與檢測(cè)播種量的相對(duì)偏差小于8.0%,滿足油菜精量播種檢測(cè)需求。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
