四輪驅動混合動力汽車模式切換協調控制
2023-03-08 02:21:44李天景王琨陸從相劉鴻遠林兆擎
車用發動機 2023年1期
李天景,王琨,陸從相,劉鴻遠,林兆擎
(1.鹽城工業職業技術學院汽車與交通學院,江蘇 鹽城 224005;2.南京工業大學材料科學與工程學院,江蘇 南京 210009)
混合動力汽車(Hybrid Electric Vehicle,HEV)既具有純電動汽車高效率和低排放的優點,又兼具傳統內燃機車在動力性和續駛里程方面的優勢,從而成為解決當前節能環保問題的切實可行方案[1-3]。但是其在工作模式切換過程中伴隨著動力源輸出轉速和轉矩的突變,易導致整車動力輸出不平穩,使駕駛性能變差。在保證混合動力汽車節能減排的基礎上,通過模式切換協調控制有效提高駕駛性能,具有重要的研究意義[4-5]。
對于上述問題,豐田公司采用行星齒輪機構的動力耦合裝置,結合雙電機,直接測量發動機實際轉矩,較好地解決了不同動力源間的動態協調控制問題[6-7]。江蘇大學左言言等、重慶大學羅松[8-9]提出了“發動機動態轉矩估計+電動機轉矩補償”的模式切換動態協調控制策略。CANOVA等[10]采用基于模型的控制方法,通過電動機快速響應補償發動機慢響應,提高了整車駕駛性能。同濟大學趙治國等[11]設計了基于混雜系統的無擾動模式切換控制策略。清華大學戴一凡等[12]針對單電機強混合動力系統,提出了“發動機起動過程轉矩協調控制/發動機退出過程轉矩補償控制”的動態協調控制策略,取得了較好的控制效果。重慶交通大學李軍等[13]依據驅動輪滑模變結構控制算法,制定出目標驅動轉矩控制策略。
本研究中的四輪驅動混合動力汽車采用了前后軸雙電機的結構,針對該混合動力車輛結構特點,以純電動向混合驅動模式切換過程為研究對象,開發模式切換協調控制策略,主動控制離合器接合壓力使得電機能夠實現定轉矩補償,并有效控制發動機轉速波動。最后通過臺架和實車試驗對設計的協調控制策略進行驗證。
1 四輪驅動混合動力系統
1.1 基本結構
四輪驅動混合動力汽車動力總成系統基本結構見圖1,其中,發動機、前驅電機、CVT變速器、離合器、主減速器采用同軸布置方式連接,用于驅動車輛前軸,后軸則布置有后驅電機和主減速器,形成前軸發動機和前驅電機驅動,后軸電機驅動的四輪驅動混合動力系統。四輪驅動混合動力汽車主要部件選型見表1。

1—前軸;2—前主減速器;3—自動變速器;4—前離合器;5—前驅電機;6—后離合器;7—整車控制器;8—發動機;9—電池包;10—后驅電機;11—后主減速器;12—后軸。

表1 混合動力汽車主要部件參數
1.2 工作原理
車輛行駛過程中前驅電機和后驅電機均可以驅動車輛,同時也可以作為發電機發電和回收制動能量。車輛通過前后離合器的接合與斷開以及發動機、電機的不同工作狀態實現整車在多種工作模式下運行。車輛工作模式見表2。

表2 四輪驅動混合動力汽車工作模式
2 發動機起動過程轉矩協調控制
2.1 車輛動力學分析
在不同的驅動模式下,四輪驅動混合動力汽車不同動力源間轉速、轉矩關系為
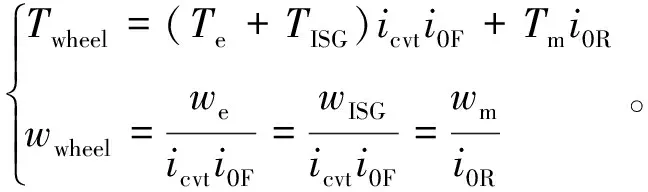
(1)
式中:Twheel為車輪處的總驅動轉矩;Te為發動機輸出轉矩;TISG為前驅電機輸出轉矩;icvt為自動變速器速比;i0F為前主減速器速比;Tm為后驅電機輸出轉矩;i0R為后主減速器速比;wwheel為車輪轉速;we為發動機轉速;wISG為前驅電機轉速;wm為后驅電機轉速。
當車輛處于純電動行駛模式時,發動機不參與工作,前離合器處于接合狀態,后離合器斷開,后驅電機單獨驅動車輛,ISG電機保持恒定轉速狀態,以維持CVT油路潤滑。若車輛需要切換至混合驅動模式,此時前后離合器均處于接合狀態,在模式切換過程中,需提供額外轉矩供發動機起動。
2.2 發動機起動轉矩確定
發動機起動轉矩需要使發動機在較短的時間內飛輪從靜止達到預定轉速,以保證發動機正常起動。發動機起動轉矩以發動機靜態轉動阻力矩為基準,同時考慮離合器接合壓力和電機轉速,其參考函數計算公式如下:

(2)
式中:Tes為發動機靜態阻力轉矩;J為飛輪轉動慣量;t為飛輪從靜止達到預定轉速的時間;Ts為發動機起動轉矩;p為離合器接合壓力;n為ISG電機轉速。
2.3 離合器接合壓力控制
后離合器在模式切換過程中起到傳遞發動機起動轉矩的作用,離合器在接合過程中轉矩傳遞關系可以表示為
Tc=zμcAcpcsgn(Δc)。
(3)
式中:Tc為離合器傳遞轉矩;z為離合器摩擦片數;μc為摩擦片間動摩擦因數;Ac為摩擦片有效面積;pc為離合器壓力;Δc為離合器主從動端轉速差;sgn為符號函數,當離合器正向接合時函數值取1,當時離合器斷開時函數值取0,當時離合器反向接合時函數值取-1。
本研究的控制思路為后離合器在發動機點火輸出轉矩之前僅傳遞發動機起動所需轉矩,點火輸出轉矩后,離合器處于完全接合狀態,即發動機點火輸出轉矩之前
Tc=Tes。
(4)
在給定離合器結構參數值均確定的情況下,離合器傳遞轉矩可以通過控制離合器接合壓力實現,將式(2)、式(4)代入式(3)可得離合器接合壓力為

(5)
離合器接合壓力、ISG電機轉速以及發動機起動轉矩的關系見圖2。
2.4 電機補償轉矩
鑒于電機轉矩響應快、精度高的特點,發動機起動轉矩由電機提供。四輪混合動力汽車前后軸均有電機,其中前驅電機通過后離合器與發動機連接,后驅電機則單獨驅動后軸。本研究從降低控制難度的角度出發,選定后驅電機為發動機提供補償轉矩,結合式(1)、式(2),模式切換過程中,在保證車輛正常行駛輸出轉矩的情況下,后驅電機提供的額外補償轉矩為

(6)
式中:Tms為后驅電機提供的額外補償轉矩。
2.5 發動機轉速控制
模式切換要求在盡量短的時間內完成從純電動到混合驅動的切換,一方面發動機的起動轉矩能夠使發動機盡快達到起動轉速,另一方面發動機的轉速應盡快達到穩定值。
而發動機往往具有非線性、多工況、時變時滯等特點,發動機起動過程實際轉速與目標轉速示意見圖3。由圖3可看出,發動機在起動時的實際轉速波動較大,不能滿足模式切換中轉速快速跟隨的要求。

圖3 發動機起動轉速示意
比例-積分-微分(PID)控制在不需要確切了解被控對象數學模型的基礎上,根據經驗調節控制其參數即可取得良好的效果,結構簡單,穩定性好。基于此,采用PID控制方法對發動機轉速進行控制,控制系統結構圖見圖4。
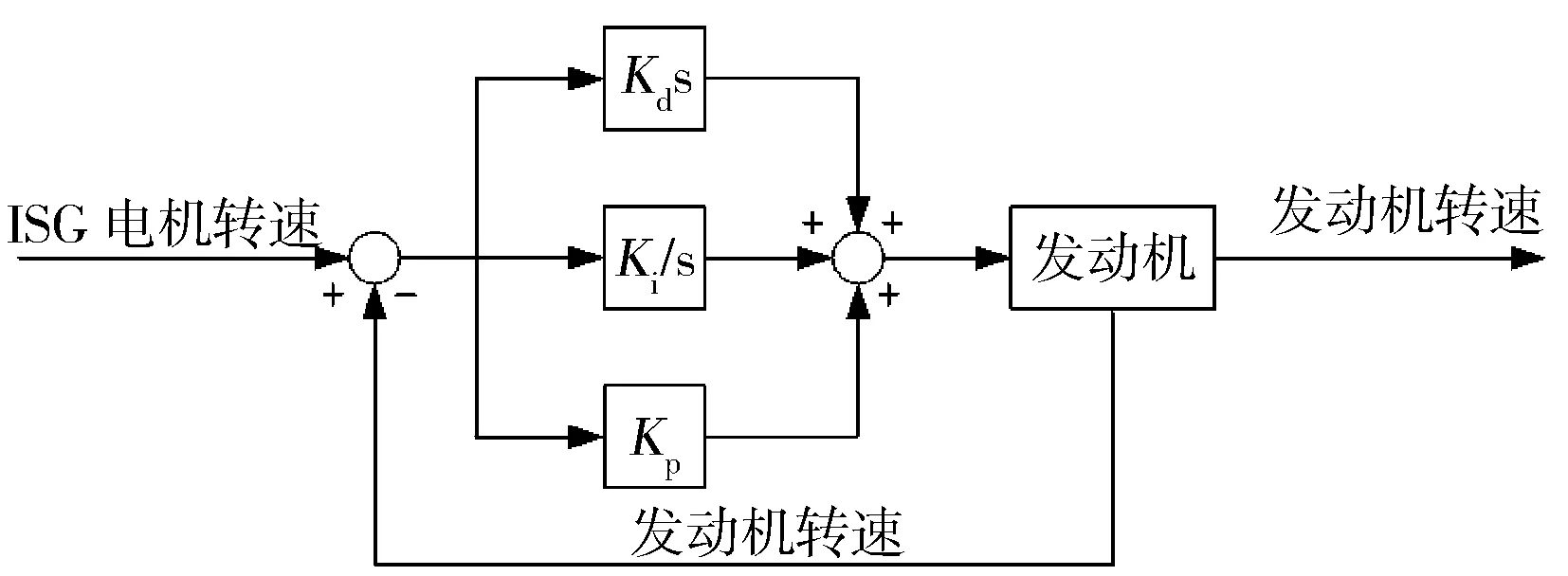
圖4 發動機轉速PID控制結構
發動機轉速PID控制器依據發動機電控節氣門開度與轉速、轉矩之間的關系建立,以前驅電機轉速和發動機實際轉速誤差為輸入,發動機轉速為輸出。圖中Kp,Ki,Kd分別為比例環節、積分環節和微分環節參數,其參數值與發動機參數相關,可以通過對發動機實際轉速響應特性的分析,實現對上述參數的整定,以達到最優控制效果。控制要素邏輯關系見圖5。

圖5 控制要素邏輯關系示意
3 臺架試驗
基于上述設計的模式切換控制策略,利用dSPACE MicroAutoBox構建了四輪驅動混合動力汽車模式切換快速控制原型(Rapid Control System,RCP),并進行了臺架試驗。試驗臺架布置見圖6。

圖6 臺架試驗布置方案
圖6中,發動機、ISG電機、自動變速器以及前后離合器并行布置,形成前軸的動力輸出,后驅電機通過轉矩耦合裝置與自動變速器輸出軸并聯,使得四輪驅動混合動力汽車的驅動形式在試驗臺架上得到實現,同時,在轉矩耦合裝置輸出端設置測功機實現對車輛運行工況的監測。RCP作為控制單元,與發動機、ISG電機、自動變速器以及前后離合器實現信號連接,并能夠對上述部件實現主動控制,以達到模式切換協調控制的效果。臺架試驗實物見圖7。

圖7 臺架試驗實物圖
臺架試驗選擇車輛加速行駛工況,在邏輯門限值能量管理策略的控制下,車輛在某一時刻由純電動模式切換至混合驅動模式,該過程試驗結果見圖8。
圖8a中階梯狀曲線為車輛驅動模式示意,第一階段為純電動,第二階段為模式切換階段,第三階段為混合驅動階段。由圖中可以看出,四輪驅動混合動力汽車加速行駛過程中,處于純電動模式時,后驅電機單獨提供動力,發動機轉速為0,ISG電機轉速恒定以維持CVT油壓;后離合器此時斷開,接合壓力為0,如圖8b所示。在某一時刻進行模式切換后,后離合器接合壓力增加,后驅電機提供補償轉矩,通過后離合器傳遞至發動機,帶動發動機轉動,當轉速達到特定轉速(600 r/min)時發動機點火,此時對發動機轉速進行PID閉環控制,防止出現較大轉速波動,并在很短時間內實現與ISG電機的同步,如圖8b、圖8c;當發動機與ISG電機實現轉速同步后,后離合器壓緊,此時接合壓力最大。圖8a中混合驅動模式中ISG電機轉速與發動機轉速存在一定轉速差,這是由于在信號采集過程中所用傳感器不同,實際情況則是在離合器完全結合情況下,兩者轉速相同。在切換過程中,車輛速度未出現較大波動,加速曲線較為平滑,沖擊度小,如圖8c所示,表明模式切換過程中未出現較大的轉矩波動。

圖8 臺架試驗結果
4 實車試驗
為進一步驗證設計的控制策略,在臺架試驗的基礎上,進行了實車試驗,以四輪驅動混合動力汽車為試驗載體,選擇某段直行路面,以駕駛員正常駕駛為試驗工況,測試過程中重點分析模式切換過程中各部件參數。實車試驗見圖9。
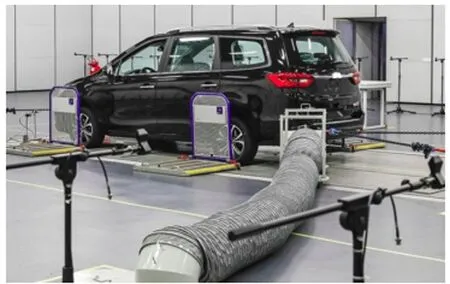
圖9 實車轉鼓試驗圖
實車轉鼓試驗結果見圖10。由圖10可以看出,當車速為35 km/h時,車輛由純電動模式切換至混合驅動模式,初始時刻ISG電機轉速略有下降,這是由于離合器由斷開進入接合狀態,離合器接合壓力由0切換至定壓力,傳遞起動轉矩至發動機,帶動發動機轉速提升。發動機點火后,其轉速會有波動,并會高于ISG轉速,此時在PID控制器作用下,轉速迅速與ISG電機同步,隨后后離合器完全接合,發動機輸出轉矩,完成模式切換,該過程中發動機起動轉矩完全由后驅電機提供。圖10c中,模式切換過程中后驅電機轉矩下降,這是由于輪邊需求轉矩減小的緣故,此時后驅電機仍提供發動機補償轉矩。實車試驗中,車速曲線較為平滑,表明行駛過程中未出現動力沖擊,如圖10b所示,進一步驗證了控制策略的有效性。

圖10 實車轉鼓試驗結果
5 結束語
針對四輪驅動混合動力汽車,制定了從純電動模式切換至混合驅動模式的模式切換協調控制策略,搭建了試驗臺架及實車轉鼓試驗平臺,對該控制策略進行了測試。臺架試驗和實車試驗表明,模式切換協調控制策略能夠確保純電動向混合驅動切換的正常進行,切換過程中車速維持正常,未出現動力沖擊。模式切換過程中實現了對離合器接合壓力的控制,合理地確定了發動機起動轉矩,同時,發動機轉速在PID控制下,未出現較大波動,迅速完成與ISG電機的轉速同步。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
