無人直升機(jī)六足式起落架設(shè)計(jì)與控制算法
2023-03-11 06:14:04劉昊林劉小川王計(jì)真董久祥
中國(guó)機(jī)械工程 2023年4期
劉昊林 劉小川 任 佳 王計(jì)真 董久祥 方 正
1.中國(guó)飛機(jī)強(qiáng)度研究所結(jié)構(gòu)沖擊動(dòng)力學(xué)航空科技重點(diǎn)實(shí)驗(yàn)室,西安,7100652.東北大學(xué)信息科學(xué)與工程學(xué)院,沈陽,1100043.東北大學(xué)機(jī)器人科學(xué)與工程學(xué)院,沈陽,110169
0 引言
傳統(tǒng)無人直升機(jī)目前普遍使用的起落架形式有滑橇式和機(jī)輪式兩種[1],其起降環(huán)境應(yīng)盡量保持平坦,下降過程應(yīng)保持緩慢、平穩(wěn),著陸后應(yīng)保持整個(gè)機(jī)體穩(wěn)定。但是,對(duì)于特定的應(yīng)用場(chǎng)景,平坦的區(qū)域并不容易找到,而且野外作戰(zhàn)地形環(huán)境中經(jīng)常無法找到合適起降地點(diǎn),如山丘地形、亂石地面等;此外在海洋環(huán)境下,大風(fēng)海浪導(dǎo)致的艦面晃動(dòng)也會(huì)對(duì)無人直升機(jī)安全起降和停放產(chǎn)生不良影響[2]。上述條件極大限制了無人直升機(jī)的適用范圍。面向非結(jié)構(gòu)化復(fù)雜地形,需要提出一種環(huán)境適應(yīng)能力強(qiáng)的起落裝置和準(zhǔn)確穩(wěn)定的地形自適應(yīng)著陸策略,在復(fù)雜的地形下實(shí)現(xiàn)安全平穩(wěn)的著陸,從而拓展無人直升機(jī)的適用范圍并提高無人直升機(jī)執(zhí)行任務(wù)的效率。
地形自適應(yīng)起落架可極大拓展垂直起降飛機(jī)的應(yīng)用范圍,顯著提高垂直起降飛機(jī)的墜毀生存力,應(yīng)用前景廣闊。國(guó)外科研機(jī)構(gòu)對(duì)地形自適應(yīng)起落架研究起步較早,在理論研究的基礎(chǔ)上開展實(shí)物驗(yàn)證試驗(yàn),取得了一些先進(jìn)性的研究成果。
美國(guó)國(guó)防先進(jìn)計(jì)劃局(DARPA)于2015年率先開展了“自適應(yīng)起落架”項(xiàng)目[3],該技術(shù)能夠使直升機(jī)在更為崎嶇、傾斜的地面完成著陸,從而顯著擴(kuò)大直升機(jī)的應(yīng)用范圍。佐治亞理工大學(xué)于2015年基于四足仿生腿結(jié)構(gòu),研制了一種名為“Robotic Landing Gear”的起落架[4],它擺脫了直升機(jī)只能在平坦地面起降的限制。這套著陸系統(tǒng)在機(jī)身兩側(cè)對(duì)稱布置了4只有觸覺傳感器的機(jī)械足,可以協(xié)調(diào)工作,根據(jù)著陸區(qū)域在控制器下可以擺出最佳的落地角度,可以使飛行器在非結(jié)構(gòu)地面、臺(tái)階和斜坡上降落[5],并且通過仿真驗(yàn)證了整個(gè)起落裝置在不確定環(huán)境下著陸的魯棒性[6]。之后于 2018 年提出了一種利用線纜驅(qū)動(dòng)的機(jī)器人腿式四桿起落架裝置,通過實(shí)驗(yàn)證明了該裝置具備 20°斜坡的平穩(wěn)降落能力[7]。2017年,俄羅斯的研究團(tuán)隊(duì)研究了一種“蜂腿”式四旋翼無人直升機(jī)起落架[8],屬于鉸接機(jī)械腿式起落架,并通過實(shí)驗(yàn)證明旋翼直升機(jī)在不同坡度、不同平面、不同臺(tái)階面的地形剖面估計(jì)正確性以及平穩(wěn)著陸。
我國(guó)在傳統(tǒng)起落架領(lǐng)域取得了顯著成果,但對(duì)地形自適應(yīng)起落架的研究起步較晚,基本處于理論研究階段。2014年,南京航空航天大學(xué)設(shè)計(jì)出一種帶有三個(gè)液壓伸縮桿的起落架[9],通過控制每根液壓桿長(zhǎng)度來實(shí)現(xiàn)復(fù)雜崎嶇地形的起降。2015年,鄭州大學(xué)設(shè)計(jì)了一種四腿式全地形直升機(jī)起落架[10],通過壓力傳感器控制腿旋轉(zhuǎn)和伸縮實(shí)現(xiàn)全地形著陸。2016年合肥工業(yè)大學(xué)設(shè)計(jì)了一種針對(duì)小型無人直升機(jī)的仿生起落架[11],并對(duì)設(shè)計(jì)結(jié)構(gòu)的強(qiáng)度進(jìn)行了校核,該起落架采用單自由度四桿機(jī)構(gòu)。2018年哈爾濱工業(yè)大學(xué)設(shè)計(jì)了一種前三點(diǎn)式地形自適應(yīng)起落架[12],通過控制每條支撐腿的上下支腿實(shí)現(xiàn)復(fù)雜地形的降落。
目前,我國(guó)對(duì)地形自適應(yīng)起落架的研究處于初步探索階段,一些可以面向非結(jié)構(gòu)地形的設(shè)計(jì)方案還處于研究階段,亟需開展面向復(fù)雜地形的自適應(yīng)腿式起落架相關(guān)技術(shù)的深入研究。
觀察發(fā)現(xiàn),蝗蟲、蜻蜓等自然界中的飛行昆蟲棲落時(shí)均采用多點(diǎn)觸地方式,通過復(fù)眼觀察、足部感知和腿部伸展的協(xié)調(diào)與配合,保證身體可在地面、枝頭等復(fù)雜環(huán)境下穩(wěn)定停靠;多足獨(dú)立運(yùn)動(dòng)保證了其地面行動(dòng)能力;腿部主動(dòng)蜷縮可有效減緩著陸撞擊,降低撞擊載荷對(duì)其身體造成的損傷。當(dāng)前廣泛研究的足式機(jī)器人,設(shè)計(jì)構(gòu)想亦來源于仿生學(xué)理念,其腿部拓?fù)洹Ⅱ?qū)動(dòng)與控制、步態(tài)規(guī)劃等均參考了動(dòng)物的腿部構(gòu)造和運(yùn)動(dòng)特征[13]。
本文考慮垂直起降飛行器起降過程和飛行昆蟲棲落的諸多相似性,借鑒多足機(jī)器人在腿部設(shè)計(jì)、驅(qū)動(dòng)與控制等方面的成熟技術(shù),創(chuàng)造性地提出一種基于智能仿生腿的地形自適應(yīng)起落架,以滿足垂直起降飛行器在非結(jié)構(gòu)地面的自適應(yīng)起降需求。無人直升機(jī)起落架采用仿生腿式結(jié)構(gòu)實(shí)現(xiàn),起落架具有收起和伸展、復(fù)雜地形自適應(yīng)著陸和斷電支撐、晃動(dòng)艦面著陸和平穩(wěn)停放、無需重復(fù)起降的足式短距運(yùn)動(dòng)等功能,同時(shí)利用腿式著陸可以吸收能量,緩沖落地沖擊,顯著提高無人直升機(jī)的生存性。此外,仿生腿式起落架系統(tǒng)選配三維激光雷達(dá)和視覺模塊,用于感知降落環(huán)境地形,建立3D地圖;仿生腿的底部安裝六維力傳感器,用于監(jiān)測(cè)足端觸地以及判斷地形的情況;機(jī)身裝有加速度傳感器IMU,在復(fù)雜的環(huán)境中用于監(jiān)測(cè)機(jī)身的位姿信息,通過在線規(guī)劃調(diào)整機(jī)身的姿態(tài),使無人直升機(jī)可以平穩(wěn)著陸,實(shí)現(xiàn)復(fù)雜環(huán)境下起落架的地形自適應(yīng)。
1 腿式起落架構(gòu)型與結(jié)構(gòu)設(shè)計(jì)
在仿生機(jī)構(gòu)設(shè)計(jì)過程中,設(shè)計(jì)的構(gòu)型與其運(yùn)動(dòng)能力有直接的關(guān)系。仿生腿式起落架的構(gòu)型設(shè)計(jì)主要考慮以下幾個(gè)部分:仿生腿數(shù)量、腿的分布以及腿部結(jié)構(gòu)等[14]。從仿生腿式起落架設(shè)計(jì)性能指標(biāo)來看,腿部結(jié)構(gòu)不能過于復(fù)雜,桿件太多會(huì)使自由度冗余,從而增加逆運(yùn)動(dòng)學(xué)和逆動(dòng)力學(xué)解算的難度;同時(shí),仿生腿每個(gè)運(yùn)動(dòng)關(guān)節(jié)上都需要設(shè)置一個(gè)驅(qū)動(dòng)器,如果腿部關(guān)節(jié)過多,整機(jī)重量就會(huì)增加,而且過多的腿關(guān)節(jié)會(huì)降低機(jī)器人腿部的剛度,降低起落架的著陸穩(wěn)定性。因此,需選擇合理的腿部構(gòu)型使仿生腿式起落架適應(yīng)多種非結(jié)構(gòu)化地形,實(shí)現(xiàn)穩(wěn)定著陸。
1.1 多足式起落架構(gòu)型選擇
形態(tài)是機(jī)器人整體結(jié)構(gòu)和系統(tǒng)控制的基礎(chǔ),為了使機(jī)器人的運(yùn)動(dòng)接近動(dòng)物的靈活性同時(shí)便于控制,必須在仿生學(xué)的基礎(chǔ)上進(jìn)行簡(jiǎn)化設(shè)計(jì)。合理的仿生腿結(jié)構(gòu)是起落架在復(fù)雜環(huán)境下實(shí)現(xiàn)穩(wěn)定著陸的基本保障。從仿生腿式起落架設(shè)計(jì)需求出發(fā),綜合考慮起落架著陸穩(wěn)定性、承載能力、能耗性等,選定仿生腿式起落架的仿生腿數(shù)量、分布、自由度配置和結(jié)構(gòu)。
單足和雙足機(jī)器人因?yàn)橥葦?shù)較少,在實(shí)際環(huán)境中受很大限制,所以機(jī)器人的承載性和穩(wěn)定性都很難得到保證,尤其是在路面環(huán)境較為崎嶇的條件下。考慮步態(tài)的有效性,機(jī)器人的腿數(shù)一般是偶數(shù),最吸引人類去模仿制造的機(jī)器人主要包括四足機(jī)器人、六足機(jī)器人和八足機(jī)器人。
相比于雙足機(jī)器人,更多足的機(jī)器人在穩(wěn)定和行走等特性上要好得多。這是因?yàn)楫?dāng)多足機(jī)器人使用三條腿支撐時(shí),這三個(gè)足端可以在地面構(gòu)成支撐三角形,倘若機(jī)器人重心落入該支撐三角形中,機(jī)器人就可以形成穩(wěn)定的狀態(tài),不會(huì)傾覆。因此,對(duì)于復(fù)雜環(huán)境,多足機(jī)器人比雙足機(jī)器人更有優(yōu)勢(shì)。
在眾多類型的多足行走機(jī)構(gòu)中,六足機(jī)器人又有其獨(dú)特特點(diǎn)[15]。與四足機(jī)器人相比,六足機(jī)器人可以在身體不停頓的情況下使用三角步態(tài)行走,能夠?qū)崿F(xiàn)行走穩(wěn)定性與快速性的統(tǒng)一,而四足機(jī)器人若想實(shí)現(xiàn)靜步態(tài)行走,需要依次邁動(dòng)其四條腿,而且每次只能邁動(dòng)其中的一條,嚴(yán)重影響了機(jī)器人的行走速度。相對(duì)于八足或更多足的機(jī)器人來說,六足機(jī)器人的結(jié)構(gòu)相對(duì)簡(jiǎn)單,容易維護(hù)。因此,在滿足運(yùn)動(dòng)性能的基礎(chǔ)上,腿的數(shù)量應(yīng)當(dāng)盡可能少,以減小機(jī)構(gòu)復(fù)雜程度和質(zhì)量。在國(guó)內(nèi)外學(xué)者的研究之中,六足機(jī)器人一直是非常熱點(diǎn)的領(lǐng)域,圖1所示為早期研究中的六足機(jī)器人。

(a)OSU (b)ASV (c)ODEX-I圖1 早期研究中的六足機(jī)器人Fig.1 Hexapod robots in earlier study
考慮無人直升機(jī)對(duì)著陸穩(wěn)定性、著陸沖擊以及負(fù)載的要求,采用六足式起落架是合適的,既能保證更好的穩(wěn)定性,也可以提高承載能力,在移動(dòng)時(shí)可保證更好的穩(wěn)定性。三角步態(tài)(任一時(shí)刻都有不相鄰的三條腿著地支撐,另外三條腿擺動(dòng),不相鄰的三條腿支撐擺動(dòng)連續(xù)切換穩(wěn)定向前運(yùn)動(dòng))保證了機(jī)體在任何時(shí)候都有三條腿支撐平面形成三角形,這可以有效提高行走的穩(wěn)定性,也可以提高控制的魯棒性。
起落架六條仿生腿的腿部布置方式可以采用矩形和六邊形布置[16],如圖2所示。
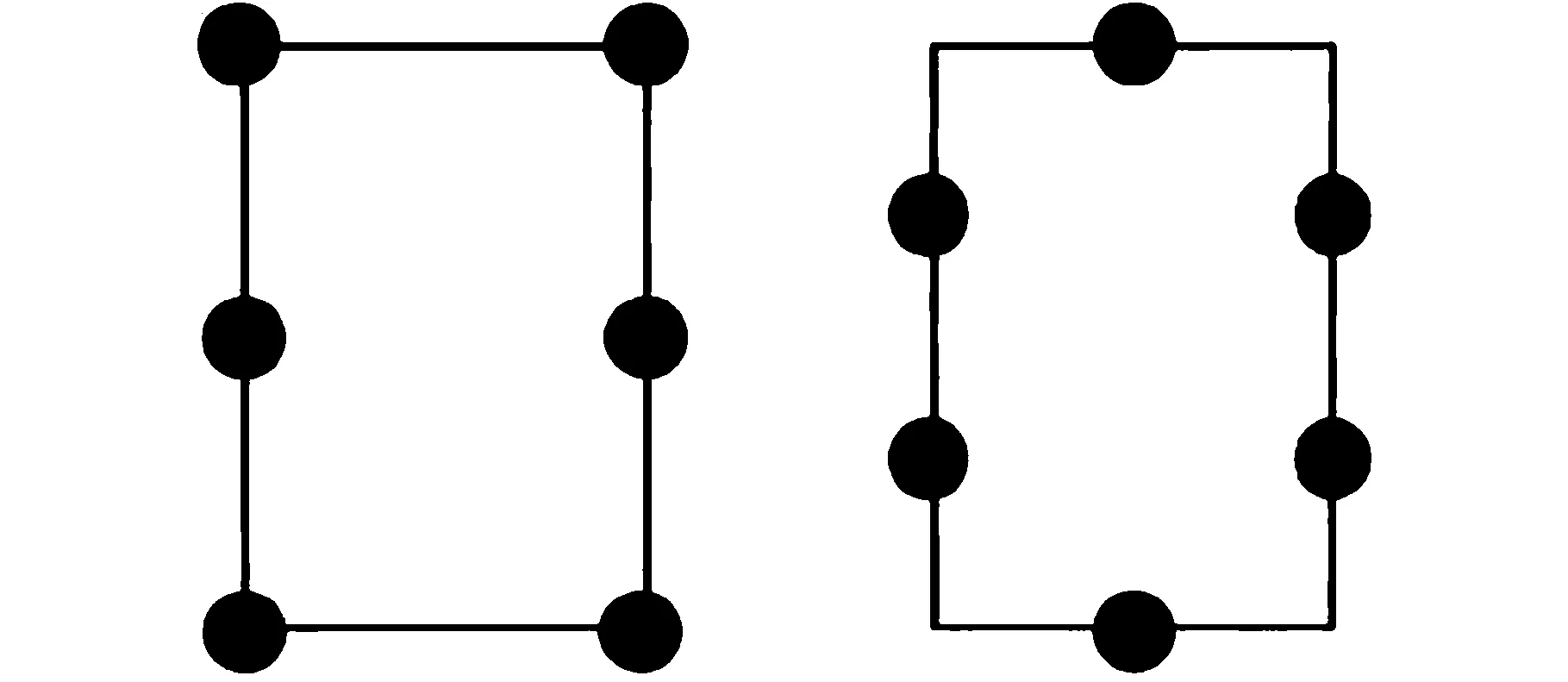
(a)矩形布置 (b)六邊形布置 圖2 六足機(jī)器人腿部布置方式Fig.2 Layout of legs of hexapod robot
腿部的布置方式首先考慮機(jī)器人在運(yùn)動(dòng)過程中的穩(wěn)定性。為了準(zhǔn)確有效地衡量機(jī)器人的穩(wěn)定性,采用改進(jìn)的靜態(tài)穩(wěn)定裕度分析法[17]。
如當(dāng)機(jī)器人以三角步態(tài)方式行走時(shí),構(gòu)成的支撐區(qū)域?yàn)槿切危€(wěn)定區(qū)域面積越小,機(jī)器人在此步態(tài)下行走時(shí)的穩(wěn)定性越差。當(dāng)機(jī)器人采用三角步態(tài)穩(wěn)定行走時(shí),假設(shè)機(jī)器人的機(jī)體長(zhǎng)為L(zhǎng),寬為W,矩形布置和六邊形布置的穩(wěn)定裕度如表1所示。

表1 穩(wěn)定裕度分析
由表1可知,采用矩陣布置方式的穩(wěn)定性要優(yōu)于六邊形布置方式的穩(wěn)定性。當(dāng)機(jī)器人在崎嶇地形下運(yùn)動(dòng)時(shí),面對(duì)身體下方的不平坦地形,相較于六邊形配置,矩形配置的機(jī)器人可以直接越過,對(duì)不平坦地形具有更好的地形適應(yīng)性。同時(shí),左右對(duì)稱配置的拓?fù)浣Y(jié)構(gòu)使機(jī)器人的步態(tài)更加多樣化,便于規(guī)劃規(guī)則且對(duì)稱的步態(tài)。因此本文采用矩形對(duì)稱式的腿部配置。
在滿足仿生腿式起落架功能需求的基礎(chǔ)上,腿部結(jié)構(gòu)應(yīng)適當(dāng)簡(jiǎn)化,減小運(yùn)動(dòng)機(jī)構(gòu)的復(fù)雜程度,以此來降低運(yùn)動(dòng)控制的難度。六足式起落架整體構(gòu)型如圖3所示,仿生腿采用兩段腿設(shè)計(jì),每條腿設(shè)置3個(gè)自由度,即髖關(guān)節(jié)自由度、脛關(guān)節(jié)自由度和股關(guān)節(jié)自由度。髖關(guān)節(jié)自由度保證機(jī)器人腿部能夠水平擺動(dòng),脛關(guān)節(jié)和股關(guān)節(jié)自由度使仿生腿具有二維空間的寬域覆蓋能力,完成仿生腿的位置和高度控制。髖關(guān)節(jié)、脛關(guān)節(jié)和股關(guān)節(jié)這3個(gè)自由度的聯(lián)動(dòng)使機(jī)器人腿部能在三維空間中靈活運(yùn)動(dòng),也使機(jī)器人具備對(duì)多種復(fù)雜地形的適應(yīng)能力。同時(shí)每條腿采用并聯(lián)結(jié)構(gòu),并使用智能感知驅(qū)動(dòng)單元,實(shí)現(xiàn)高動(dòng)態(tài)阻抗控制[18],一方面有效吸收著陸時(shí)的沖擊,另一方面可自動(dòng)適應(yīng)地形,保證身體穩(wěn)定性。
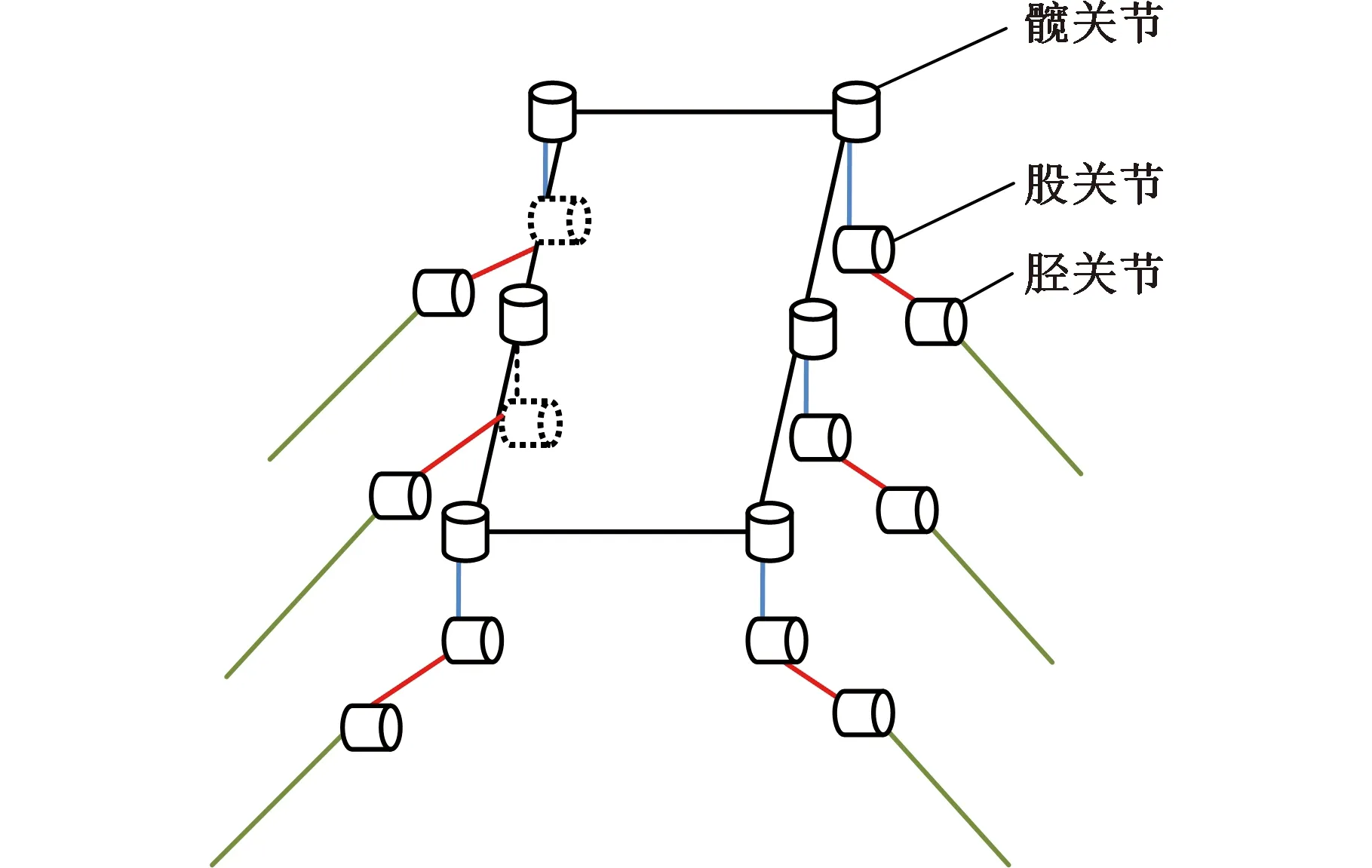
圖3 六足式起落架整體構(gòu)型圖Fig.3 Hexapod landing gear configuration diagram
1.2 單足結(jié)構(gòu)設(shè)計(jì)
根據(jù)上節(jié)仿生腿構(gòu)型分析,腿部結(jié)構(gòu)設(shè)計(jì)如圖4所示,其中,圖4a為傳統(tǒng)關(guān)節(jié)式單腿設(shè)計(jì)方案,在該方案中驅(qū)動(dòng)元件安裝在關(guān)節(jié)處,該方案為目前多足仿生機(jī)器人采用的設(shè)計(jì)方案,與動(dòng)物腿部外形和運(yùn)動(dòng)特性一致。該方案的優(yōu)點(diǎn)是機(jī)構(gòu)設(shè)計(jì)簡(jiǎn)單,運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析方便,控制參數(shù)明確;缺點(diǎn)是關(guān)節(jié)驅(qū)動(dòng)扭矩大,尤其是墜撞過程中,強(qiáng)沖擊動(dòng)載導(dǎo)致關(guān)節(jié)驅(qū)動(dòng)扭矩顯著增加,驅(qū)動(dòng)元件有結(jié)構(gòu)破壞風(fēng)險(xiǎn)。

(a)關(guān)節(jié)式單腿設(shè)計(jì) (b)機(jī)構(gòu)式單腿設(shè)計(jì)圖4 腿部結(jié)構(gòu)設(shè)計(jì)Fig.4 Leg structure design
進(jìn)一步優(yōu)化腿部結(jié)構(gòu),本文提出了一種基于多連桿機(jī)構(gòu)理念[19]的單腿結(jié)構(gòu)設(shè)計(jì)方案。該方案的核心設(shè)計(jì)思路是:采用兩個(gè)四連桿機(jī)構(gòu)ABCD、EFGD和一個(gè)平行四邊形機(jī)構(gòu)DIHG組成的混聯(lián)機(jī)構(gòu)實(shí)現(xiàn)單腿功能設(shè)計(jì),如圖4b所示。該方案利用四連桿結(jié)構(gòu)的急回特性實(shí)現(xiàn)減速增力[20],同時(shí)利用機(jī)構(gòu)連桿共線時(shí)的死點(diǎn)位置實(shí)現(xiàn)起落架結(jié)構(gòu)在墜撞過程中關(guān)節(jié)鎖死的能力,降低對(duì)驅(qū)動(dòng)元件輸出力矩的要求。驅(qū)動(dòng)元件集中于四連桿機(jī)構(gòu)的A點(diǎn)和E點(diǎn),避免在關(guān)節(jié)處安裝驅(qū)動(dòng)元件,使整體結(jié)構(gòu)更加緊湊美觀。
基于構(gòu)型分析和腿部設(shè)計(jì)方案,在MATLAB中完成腿部參數(shù)優(yōu)化[21],以各桿件長(zhǎng)度、關(guān)節(jié)角α和β為優(yōu)化變量,以足端運(yùn)動(dòng)范圍滿足復(fù)雜地形著陸條件為約束條件,以關(guān)節(jié)驅(qū)動(dòng)力矩最小為優(yōu)化目標(biāo),建立單腿機(jī)構(gòu)參數(shù)優(yōu)化設(shè)計(jì)模型,并獲取最優(yōu)化參數(shù)設(shè)計(jì)。
起落架每條仿生腿設(shè)置3個(gè)自由度,通過左右兩側(cè)驅(qū)動(dòng)部件轉(zhuǎn)動(dòng)驅(qū)動(dòng)脛關(guān)節(jié)和股關(guān)節(jié)的旋轉(zhuǎn)運(yùn)動(dòng),實(shí)現(xiàn)足端的平面空間運(yùn)動(dòng),用于實(shí)現(xiàn)地形自適應(yīng)著陸。上側(cè)驅(qū)動(dòng)部件驅(qū)動(dòng)髖關(guān)節(jié),以實(shí)現(xiàn)起落架折疊后的收起和展開。踝關(guān)節(jié)安裝力傳感器,用于足端壓力感知,足底采用橡膠緩沖材料以降低沖擊載荷峰值。圖5所示是起落架總體設(shè)計(jì)和單腿機(jī)械結(jié)構(gòu)。

(a)起落架總體設(shè)計(jì) (b)單腿機(jī)械結(jié)構(gòu)圖5 腿部設(shè)計(jì)方案Fig.5 Leg design
2 六足式起落架運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)分析
仿生腿式起落架的運(yùn)動(dòng)學(xué)分析是進(jìn)行運(yùn)動(dòng)規(guī)劃、驅(qū)動(dòng)控制以及性能分析的基礎(chǔ)[22]。在實(shí)際運(yùn)動(dòng)中,能控制的是安裝在各個(gè)腿、各個(gè)關(guān)節(jié)上的伺服電機(jī),而實(shí)際要控制的是各足端在世界坐標(biāo)系中的運(yùn)動(dòng)軌跡和位姿,因此在1.2節(jié)對(duì)仿生腿構(gòu)型設(shè)計(jì)的基礎(chǔ)上,必須首先建立運(yùn)動(dòng)學(xué)模型,將各個(gè)腿的關(guān)節(jié)坐標(biāo)和世界坐標(biāo)聯(lián)系起來,再通過逆運(yùn)算將在世界坐標(biāo)系中的位姿映射到關(guān)節(jié)坐標(biāo)系中,通過運(yùn)動(dòng)學(xué)分析完成對(duì)起落架仿生腿的運(yùn)動(dòng)控制。
圖4b中,兩自由度單腿機(jī)構(gòu)共有12個(gè)連桿,各桿的長(zhǎng)度用l表示,如lAB表示連桿AB的長(zhǎng)度。lCD和lDI為一個(gè)連桿,中間存在一個(gè)鉸點(diǎn)D,將它們看作是共線固接的兩個(gè)連桿,lIH和lHN采用類似方法處理。鉸接點(diǎn)D點(diǎn)、A點(diǎn)和E點(diǎn)與機(jī)身相連,在運(yùn)動(dòng)過程中坐標(biāo)不變。在分析過程中,以D點(diǎn)為坐標(biāo)原點(diǎn),其中l(wèi)DA和lEF與x軸正方向的夾角分別為α和β。
假定已知連桿AB和連桿EF的方位角(定義為與lAB軸正方向的夾角),求解足端N的坐標(biāo)(xN,yN)。
在四連桿機(jī)構(gòu)ABCD中,AB為主動(dòng)桿件,CD為從動(dòng)桿,BC為連桿,DA為機(jī)架,已知各桿桿長(zhǎng)分別lAB、lBC、lCD和lDA,主動(dòng)桿方位角φAB,機(jī)架角φDA=α,計(jì)算連桿BC和從動(dòng)桿CD的方位角φBC和φCD,及A、B、C各節(jié)點(diǎn)坐標(biāo)。
根據(jù)向量理論,建立各連桿之間的空間位置關(guān)系:
lABeiφAB+lBCeiφBC+lCDeiφCD+lDAeφDA=0
(1)
將式(1)在x軸和y軸上分解可得
(2)
消去φBC后可得
(3)
e=-lABcosφAB-lDAcosφDA
f=-lABsinφAB-lDAsinφDA
2lABlDAsinφABsinφDA)/(2lCD)
式(3)中,n為符號(hào)系數(shù),當(dāng)△BDC按逆時(shí)針方向時(shí),n=1,反之n= -1。解出φCD后,代入式(2),可得
(4)
得到各桿方位角,即可確定A、B、C點(diǎn)坐標(biāo):
(5)
同理在四連桿機(jī)構(gòu)EFGD中,可由連桿EF的方位角β求得足端N的坐標(biāo)(xN,yN)。
逆運(yùn)動(dòng)學(xué)是正運(yùn)動(dòng)學(xué)的逆過程,即設(shè)定D點(diǎn)為坐標(biāo)原點(diǎn),已知足端N的坐標(biāo),求解主動(dòng)桿AB和連桿EF的驅(qū)動(dòng)角α和β。
在△DIN中,已知D和N點(diǎn)坐標(biāo),可確定虛桿DN長(zhǎng)度和方位角;已知連桿DI和連桿IN的長(zhǎng)度,繼而可求得連桿DI和連桿IN的方位角φIN和φDI。
由于連桿DI和連桿CD共線,所以有φDI=φCD。
同理,在四連桿機(jī)構(gòu)中可求得GD的方位角φGD。
在平行四邊形機(jī)構(gòu)DIHG中,桿件IH的方位角φIH=φGD。
在四連桿機(jī)構(gòu)ABCD和四連桿機(jī)構(gòu)EFGD中,交換主動(dòng)桿和從動(dòng)桿的位置,可求得AB桿和EF桿的驅(qū)動(dòng)角α和β,可以根據(jù)逆運(yùn)動(dòng)學(xué)求得腿部各關(guān)節(jié)的關(guān)節(jié)角度。
通過運(yùn)動(dòng)學(xué)分析可以求得足端點(diǎn)在機(jī)身坐標(biāo)系下的位置坐標(biāo)。仿生腿式起落架動(dòng)力學(xué)分析[23]是以運(yùn)動(dòng)學(xué)分析為基礎(chǔ),運(yùn)用力學(xué)原理推導(dǎo)出機(jī)構(gòu)所受外力與運(yùn)動(dòng)狀態(tài)之間的關(guān)系,是對(duì)運(yùn)動(dòng)機(jī)構(gòu)進(jìn)行力學(xué)性能評(píng)估、動(dòng)力學(xué)優(yōu)化以及控制系統(tǒng)設(shè)計(jì)的理論基礎(chǔ)。
本文設(shè)計(jì)的仿生腿式地形自適應(yīng)起落架可以看做是一種多自由度的閉環(huán)運(yùn)動(dòng)機(jī)構(gòu)。著陸過程中仿生起落架所受的力矩τ和力F可表示為
(6)
式中,m為仿生起落架的質(zhì)量;Fi為支撐腿所受的垂向支持力;rc為重心到機(jī)體坐標(biāo)系的偏移向量;rt為機(jī)體坐標(biāo)系到足端點(diǎn)的向量。
本文通過調(diào)節(jié)足端接觸力Fi分配來控制機(jī)體狀態(tài)穩(wěn)定,通過PID控制器調(diào)節(jié)力矩τ來控制機(jī)體的俯仰角和滾轉(zhuǎn)角。
3 六足式起落架系統(tǒng)著陸控制算法
仿生腿式起落架系統(tǒng)根據(jù)地形自適應(yīng)的特點(diǎn)可以很好地應(yīng)用于復(fù)雜不平坦地面上的著陸緩沖情形。在降落的過程中需要仿生腿式起落架根據(jù)艦面情況自動(dòng)調(diào)整姿態(tài),不同狀態(tài)下采取不同的阻抗參數(shù)和移動(dòng)策略,以提高仿生起落架對(duì)地面的適應(yīng)力。無人直升機(jī)要實(shí)現(xiàn)自適應(yīng)著陸,必須通過視覺系統(tǒng)實(shí)現(xiàn)地形識(shí)別,著陸前根據(jù)目標(biāo)位置動(dòng)態(tài)調(diào)整各支撐腿姿態(tài),以保證穩(wěn)定著陸。在接近著陸時(shí),采取低剛度和低阻尼參數(shù)向地面移動(dòng);通過力傳感器判斷有一條腿提前觸地后,因低阻尼和低剛度特性而自動(dòng)向后收縮,減少對(duì)身體姿態(tài)的干擾;當(dāng)所有腿觸地后,采用中等剛度和阻尼實(shí)現(xiàn)緩沖和支撐,同時(shí)利用阻抗控制調(diào)節(jié)相應(yīng)的足力,進(jìn)行著陸后身體姿態(tài)控制調(diào)整,實(shí)現(xiàn)仿生腿式起落架的動(dòng)態(tài)自適應(yīng)著陸。
3.1 六足著陸控制算法
六足式起落架著陸步態(tài)采用主動(dòng)柔順的阻抗控制方法實(shí)現(xiàn)起落架著陸緩沖[24],其控制算法框架如圖6所示。

圖6 著陸控制算法框架Fig.6 Landing control algorithm framework
六足式起落架狀態(tài)估計(jì)和地形識(shí)別系統(tǒng)由加速度計(jì)、視覺系統(tǒng)點(diǎn)云數(shù)據(jù)和編碼器進(jìn)行信號(hào)融合實(shí)現(xiàn),得到仿六足式起落架各腿足端距離地面高度。六足式起落架關(guān)節(jié)位置控制器通過地形識(shí)別系統(tǒng)數(shù)據(jù)將各腿足端調(diào)整到與地面高度一致的位置,保證在著陸過程中各腿盡可能同時(shí)觸地。足力分配控制器根據(jù)各腿受力情況和六足式起落架當(dāng)前姿態(tài)情況,計(jì)算穩(wěn)定身體所需的各腿腿力。阻抗控制器實(shí)現(xiàn)各腿的阻抗控制,實(shí)現(xiàn)著陸過程的平穩(wěn)緩沖。
在著陸過程中,六足式起落架動(dòng)力學(xué)系統(tǒng)受力如圖7所示。Fi為足端力,ri為質(zhì)心G到足端向量,kai和Bai分別為主動(dòng)關(guān)節(jié)的剛度系數(shù)和阻尼系數(shù),kpi為被動(dòng)彈簧剛度系數(shù)。

圖7 著陸過程系統(tǒng)受力示意圖Fig.7 Stress analysis of landing
在緩沖著陸時(shí),系統(tǒng)的動(dòng)力學(xué)方程可表示為
(8)
為使機(jī)體保持平衡,需令身體水平,即滾轉(zhuǎn)角和俯仰角均為0,則所需的矯正扭矩τB和力FB可由PID控制律得出:
(9)
式中,Kp、Kd、Ki為PID增益;x、xref分別為目標(biāo)扭矩和力矩陣、測(cè)量扭矩和力矩陣。
為求解控制律中的Fi,變換等式如下:
(10)
則姿態(tài)調(diào)整力最優(yōu)分配控制率(Fi模最小)可通過求解左邊系數(shù)矩陣的Moore-Pensrose逆矩陣得到:
(11)
3.2 地形識(shí)別與重構(gòu)算法
無人機(jī)自適應(yīng)著陸地形識(shí)別系統(tǒng)主要由兩大部分組成[25],一部分為硬件系統(tǒng),一部分為著陸地形識(shí)別系統(tǒng)的軟件算法部分。硬件系統(tǒng)主要由雷達(dá)、相機(jī)、IMU、GPU處理器和CPU處理器構(gòu)成。CPU和GPU處理器用于感知建圖等的計(jì)算處理。激光雷達(dá)和相機(jī)用于感知三維空間信息和獲取無人機(jī)下方降落區(qū)域的圖像信息。軟件系統(tǒng)是地形識(shí)別統(tǒng)的重要組成部分,主要由5個(gè)部分組成,分別是傳感器標(biāo)定、基于點(diǎn)云的三維環(huán)境建模、基于點(diǎn)云的三維環(huán)境語義分割、基于圖像的可降落區(qū)域搜尋和基于圖像的可降落區(qū)域跟蹤。無人機(jī)系統(tǒng)結(jié)構(gòu)圖見圖8。

圖8 無人機(jī)系統(tǒng)結(jié)構(gòu)圖Fig.8 Stucture diagram of unmanned helicopter system
在高空中,無人機(jī)通過對(duì)相機(jī)拍攝的圖像數(shù)據(jù)進(jìn)行圖像特征提取和語義分割來確定可能的降落區(qū)域位置,然后通過跟蹤算法引導(dǎo)無人機(jī)飛向該可能的降落區(qū)域;當(dāng)無人機(jī)飛到低空時(shí),利用激光雷達(dá)、IMU和GPS傳感器獲得的數(shù)據(jù)建立局部的三維點(diǎn)云地圖,并通過點(diǎn)云的語義分割方法生成帶語義標(biāo)簽的三維點(diǎn)云地圖,然后從該點(diǎn)云地圖中得到降落區(qū)域的精確三維位置信息并引導(dǎo)無人機(jī)完成自主著陸。整體軟件系統(tǒng)結(jié)構(gòu)如圖9所示。

圖9 軟件系統(tǒng)框圖Fig.9 Software system block diagram
地形環(huán)境感知和建模對(duì)起落架自適應(yīng)著陸至關(guān)重要。傳感器標(biāo)定精度決定數(shù)據(jù)的融合精度,在傳感器平臺(tái)上,根據(jù)標(biāo)定得到的外參值將點(diǎn)云數(shù)據(jù)投影到圖像中。無人機(jī)系統(tǒng)對(duì)飛行中的周圍環(huán)境進(jìn)行感知,得到相關(guān)環(huán)境物理信息,使無人機(jī)可對(duì)環(huán)境進(jìn)行判斷,找到可降落區(qū)域,完成自主降落。
由于無人機(jī)需要準(zhǔn)確的空間信息,因此需要建立精確的三維地圖。本文采用激光雷達(dá)作為主要傳感器,建立環(huán)境的三維激光點(diǎn)云地圖,使無人機(jī)獲得準(zhǔn)確的周圍環(huán)境信息,從而執(zhí)行后續(xù)任務(wù)。
若想無人機(jī)更穩(wěn)定、更安全地完成降落任務(wù),就需要通過激光雷達(dá)傳感器獲取周圍環(huán)境的三維信息并通過三維信息實(shí)時(shí)準(zhǔn)確地理解周圍場(chǎng)景的三維語義信息,因此有必要對(duì)激光雷達(dá)點(diǎn)云數(shù)據(jù)進(jìn)行語義分割。圖像語義分割能夠?qū)z像頭傳感器拍攝的圖片或視頻流的每一個(gè)像素點(diǎn)都打上對(duì)應(yīng)的類別標(biāo)簽,這樣就可以知道圖片或視頻流中可降落區(qū)域的位置,為下一步對(duì)目標(biāo)區(qū)域的跟蹤提供一個(gè)初步的識(shí)別。
將區(qū)域搜尋算法的輸出作為可降落區(qū)域跟蹤算法的輸入,用4個(gè)坐標(biāo)(x,y,w,h)來表示一個(gè)矩形框,其中,(x,y)表示矩形框的中心點(diǎn)像素坐標(biāo),w、h表示矩形框的寬和長(zhǎng),該矩形框即是要跟蹤降落的區(qū)域。區(qū)域跟蹤算法輸出的是無人機(jī)飛行控制量,表現(xiàn)形式是通過坐標(biāo)差(目標(biāo)像素坐標(biāo)與實(shí)際像素坐標(biāo)之差)進(jìn)行映射得到的無人機(jī)飛行的目標(biāo)控制量。
基于Robot Operating System(ROS)下的Gazebo仿真系統(tǒng)搭建了用于測(cè)試無人機(jī)自主降落的仿真環(huán)境,模擬傳感器數(shù)據(jù)傳送和無人機(jī)的控制和降落[26]。在Gazebo中調(diào)用world文件作為世界環(huán)境的機(jī)制,可以通過編輯world文件的形式來自定義項(xiàng)目需要的仿真環(huán)境,在實(shí)驗(yàn)中也可以根據(jù)不同的測(cè)試需求來進(jìn)行不同的環(huán)境搭建,仿真界面如圖10所示。

圖10 無人機(jī)系統(tǒng)降落的仿真環(huán)境示意圖Fig.10 Diagram of simulation environment for helicopter system landing
4 六足式起落架著陸實(shí)驗(yàn)
本文基于MATLAB/Simulink和ADAMS搭建虛擬樣機(jī)模型,完成聯(lián)合仿真[27],驗(yàn)證控制算法的有效性,實(shí)現(xiàn)仿生腿式起落架的平穩(wěn)著陸。
4.1 虛擬樣機(jī)構(gòu)建
通過MATLAB/Simulink向ADAMS仿真模型輸入控制參數(shù),在ADAMS中實(shí)現(xiàn)仿真功能,并將ADAMS仿真結(jié)果數(shù)據(jù)輸出到MATLAB/Simulink,將控制系統(tǒng)和機(jī)械系統(tǒng)連接起來,實(shí)現(xiàn)控制系統(tǒng)的閉環(huán)交互。
在ADAMS中導(dǎo)入模型后,添加關(guān)節(jié)約束和驅(qū)動(dòng),并在ADAMS/Car模塊中分別建立平面地形、20°坡面地形、高度差為20 cm的臺(tái)階地形,分別進(jìn)行仿真。以各關(guān)節(jié)角速度作為輸入,各關(guān)節(jié)角度和各足端接觸力作為輸出,聯(lián)合仿真模型如圖11所示。
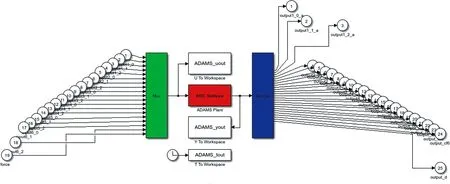
圖11 聯(lián)合仿真模型Fig.11 Co-simulation model
ADAMS中road.tbl文件夾提供多種地形環(huán)境,可以通過更改文件的地形參數(shù)完成地形模型的修改。通過多種地形來驗(yàn)證起落架著陸過程中對(duì)復(fù)雜地形的適應(yīng)能力,圖12所示為ADAMS中建立的典型地形環(huán)境。

(a)平面地形 (b)臺(tái)階地形 (c)坡面地形圖12 典型地形環(huán)境Fig.12 Typical terrain
4.2 著陸仿真分析

圖13 六足式起落架ADAMS仿真模型Fig.13 ADAMS simulation model of hexapod landing gear
在ADAMS建立虛擬樣機(jī),每條腿編號(hào)如圖13所示,模擬起落架著陸的運(yùn)動(dòng)和狀態(tài),在MATLAB/Simulink中建立著陸控制、角度控制、足力分配和阻抗控制等控制模塊,采用聯(lián)合仿真的方式分別對(duì)平面、坡度角為20°的斜坡以及高度差為20 mm的臺(tái)階地形進(jìn)行仿真。在后處理界面中通過檢測(cè)各腿與地面接觸力來判斷起落架著陸穩(wěn)定性。
在ADAMS仿真環(huán)境下,六足式起落架著陸后機(jī)體保持在水平面穩(wěn)定,著陸姿態(tài)圖見圖14。

圖14 平面地形著陸Fig.14 Plane landing
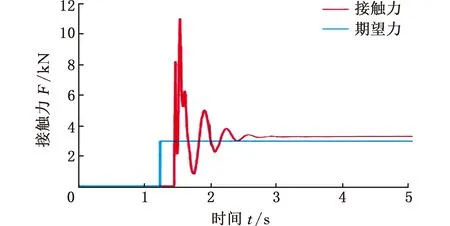
對(duì)平面著陸過程中兩側(cè)腿足端接觸力進(jìn)行分析(以1、2、6號(hào)腿為例,下同),每條腿足端接觸力在觸地初始階段不斷調(diào)整,最后趨于穩(wěn)定,如圖15所示。
(a)1號(hào)腿
(b)2號(hào)腿
(c)6號(hào)腿圖15 平面著陸時(shí)足端接觸力Fig.15 Foot force during plane landing
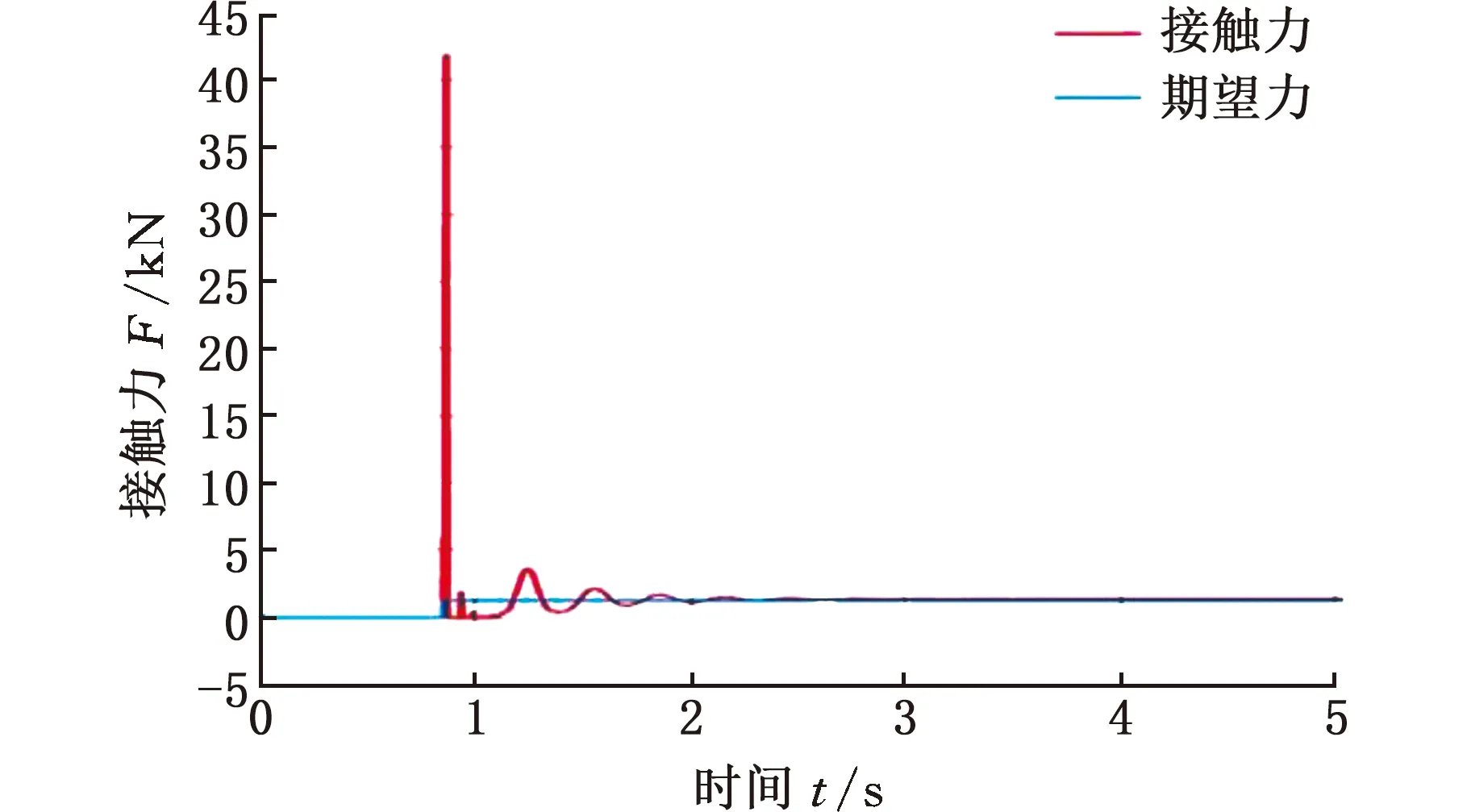
在ADAMS仿真環(huán)境下,六足式起落架著陸后機(jī)體保持在斜面穩(wěn)定,著陸姿態(tài)圖見圖16。兩側(cè)腿足端接觸力如圖17所示。
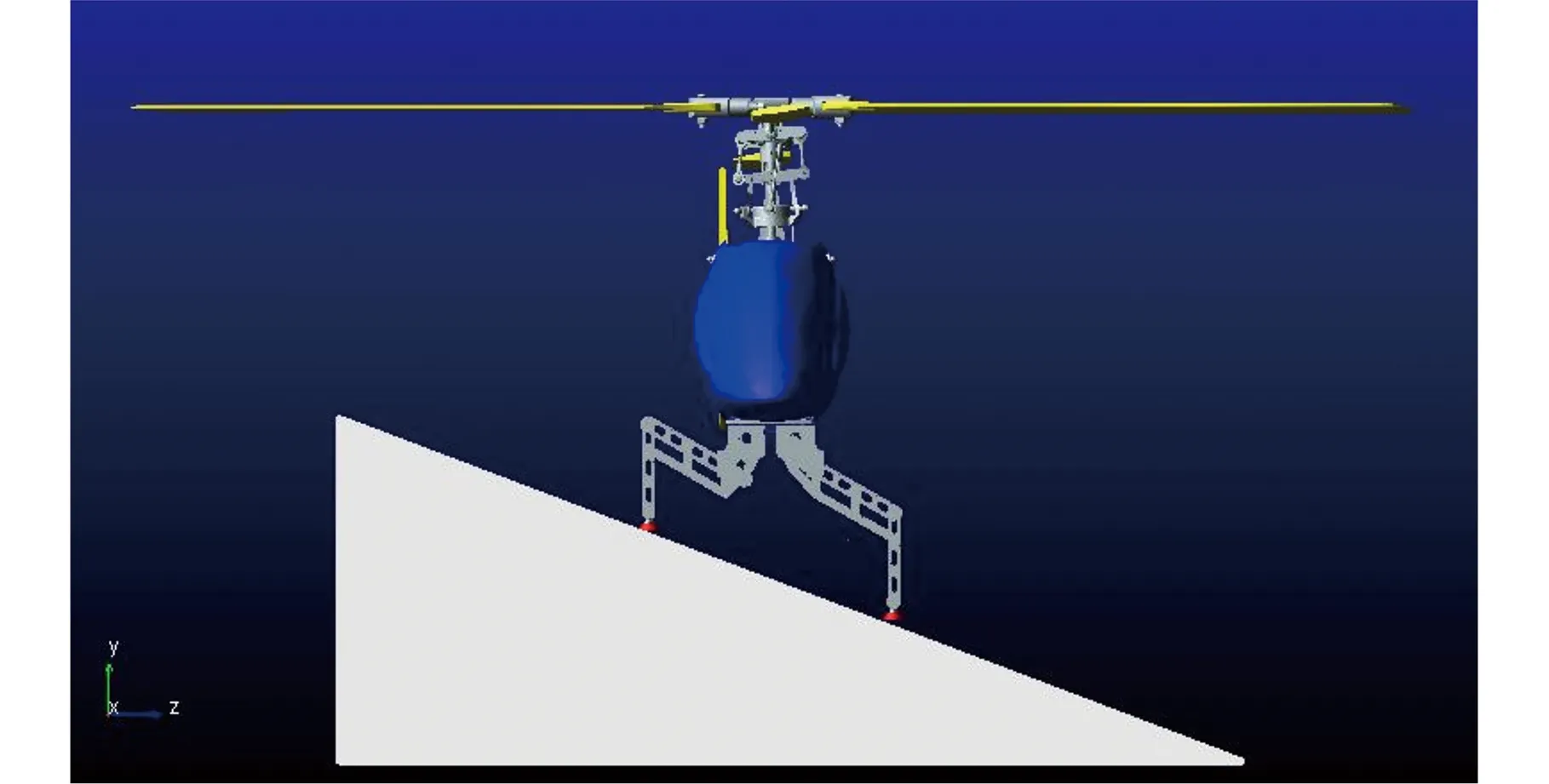
圖16 斜坡地形著陸Fig.16 Slope landing

(a)1號(hào)腿
(b)2號(hào)腿

(c)6號(hào)腿圖17 斜坡著陸時(shí)足端接觸力Fig.17 Foot force during slope landing
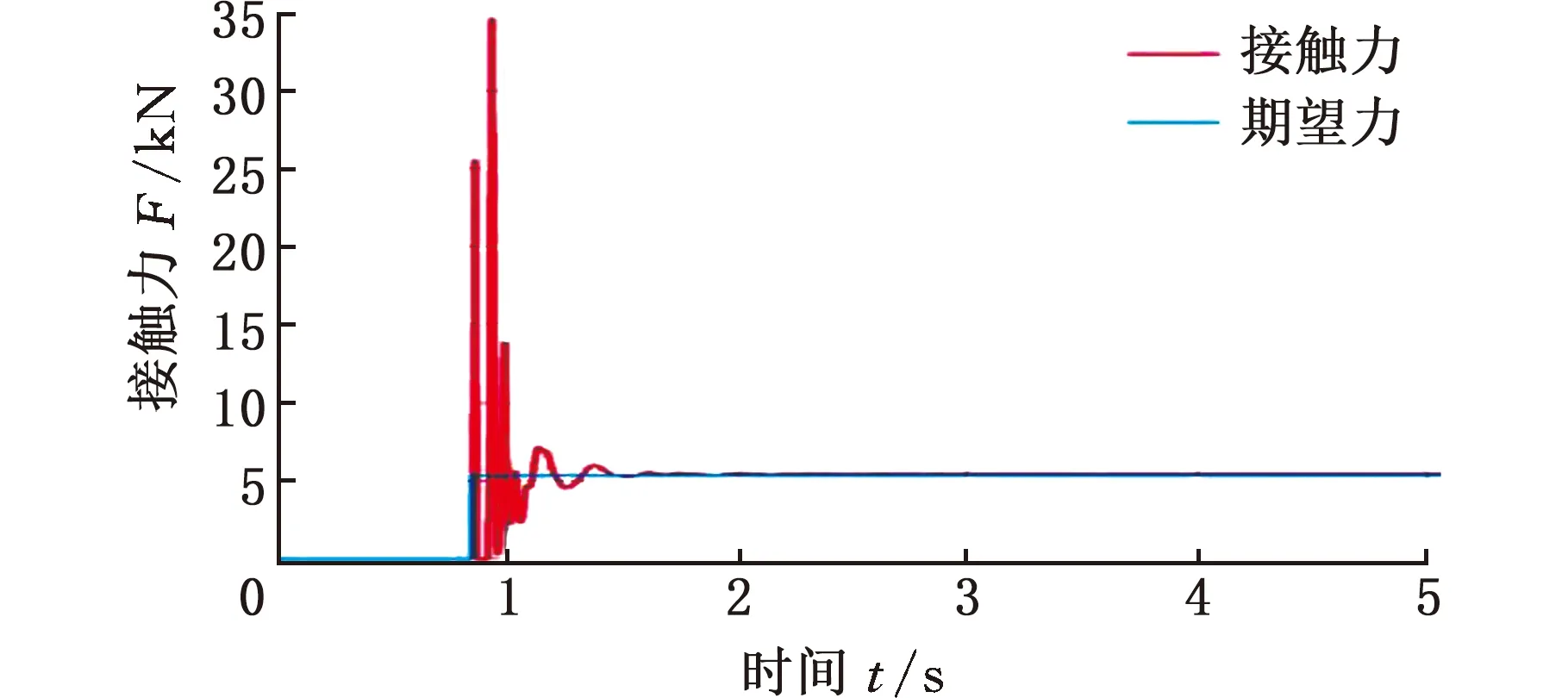
在ADAMS仿真環(huán)境下,六足式起落架著陸后機(jī)體保持在臺(tái)階面穩(wěn)定,著陸姿態(tài)圖見圖18。兩側(cè)腿足端接觸力如圖19所示。

圖18 臺(tái)階地形著陸Fig.18 Step landing
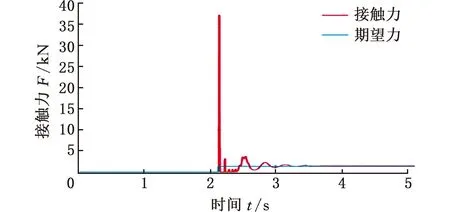
(a)1號(hào)腿

(b)2號(hào)腿

(c)6號(hào)腿圖19 臺(tái)階著陸時(shí)足端接觸力Fig.19 Foot force during step landing
由以上仿真結(jié)果可以看出,六足式起落架在著陸過程中能夠根據(jù)地形進(jìn)行相應(yīng)的腿部位姿調(diào)節(jié),并在落地時(shí)平穩(wěn)地與地面接觸,經(jīng)過阻抗控制的調(diào)節(jié),可以減緩地面對(duì)機(jī)體的沖擊力,使各腿部的足端接觸力穩(wěn)定在期望力附近,從而保持整個(gè)機(jī)體的穩(wěn)定,實(shí)現(xiàn)六足式起落架平穩(wěn)著陸。
4.3 樣機(jī)測(cè)試
為了實(shí)現(xiàn)六足式起落架的測(cè)試與驗(yàn)證,在構(gòu)型分析的基礎(chǔ)上,以無人直升機(jī)為載體,研制六足式起落架物理樣機(jī),進(jìn)一步驗(yàn)證控制算法和著陸緩沖效果,完成實(shí)驗(yàn)室性能測(cè)試與外場(chǎng)環(huán)境實(shí)驗(yàn)驗(yàn)證。
六足式起落架由六條仿生腿構(gòu)成,每條腿具備3個(gè)自由度以實(shí)現(xiàn)三維空間運(yùn)動(dòng),整機(jī)實(shí)際質(zhì)量為180 kg,負(fù)載質(zhì)量為50 kg。圖20為無人直升機(jī)的樣機(jī)測(cè)試圖,分別為無人直升機(jī)在實(shí)驗(yàn)室和真實(shí)外場(chǎng)野外地形完成著陸實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)證明,六足式起落架在飛行過程中可以實(shí)現(xiàn)靈活收放,地形識(shí)別系統(tǒng)與著陸控制算法有效,無人直升機(jī)實(shí)現(xiàn)穩(wěn)定自適應(yīng)著陸,達(dá)到了預(yù)期的效果。

圖20 無人直升機(jī)樣機(jī)測(cè)試Fig.20 Unmanned helicopter prototype test
5 結(jié)論
(1)從仿生腿數(shù)量、分布形式、腿部自由度配置和腿部結(jié)構(gòu)等方面選擇合理的腿部構(gòu)型使仿生腿式起落架適應(yīng)多種非結(jié)構(gòu)化地形。根據(jù)機(jī)構(gòu)設(shè)計(jì)方案,完成了六足式起落架運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析。
(2)通過視覺系統(tǒng)完成對(duì)動(dòng)態(tài)地形的識(shí)別,實(shí)時(shí)調(diào)整起落裝置腿部的位姿,以適應(yīng)地形完成降落。通過IMU測(cè)量起落架在水平方向的傾角,將變化的角度反饋到腿力分配算法中,動(dòng)態(tài)規(guī)劃腿力分配信息,并通過阻抗控制實(shí)時(shí)調(diào)整關(guān)節(jié)角度,實(shí)現(xiàn)六足式起落架的動(dòng)態(tài)自適應(yīng)著陸。
(3)在建立控制算法模型的基礎(chǔ)上,基于MATLAB/Simulink和ADAMS搭建虛擬樣機(jī)聯(lián)合仿真模型,經(jīng)過仿真驗(yàn)證和樣機(jī)測(cè)試,所設(shè)計(jì)的控制算法有效地完成了多種典型非結(jié)構(gòu)化地形的著陸,并實(shí)現(xiàn)了動(dòng)態(tài)自適應(yīng)著陸,證明了六足式起落架設(shè)計(jì)方法的有效性。未來將針對(duì)仿生腿式起落架進(jìn)一步優(yōu)化腿部結(jié)構(gòu),在系統(tǒng)減重的同時(shí)實(shí)現(xiàn)更大的承載能力,不斷提高仿生腿式起落架結(jié)構(gòu)的穩(wěn)定性和可靠性。