三維激光掃描技術在隧道限界中的應用
2023-03-11 08:22:40閆曉楠宋洪英霍燕濤
地理空間信息 2023年2期
關鍵詞:水平
閆曉楠,宋洪英,徐 奇,霍燕濤,程 瀟
(1.航天規劃設計集團有限公司,北京 100162)
三維激光掃描技術是上世紀九十年代中期開始出現的一項高新技術,是繼GPS 空間定位系統之后又一項測繪技術新突破[1-4]。它通過高速激光掃描測量的方法,大面積、高分辨率地快速獲取物體表面各個點的三維坐標、反射率、顏色等信息,利用這些大量、密集的點信息可快速復建出1∶1 的真彩色三維點云模型,為后續的內業處理、數據分析等工作提供準確依據。其具有快速性,效益高、不接觸性、穿透性、動態、主動性,高密度、高精度,數字化、自動化、實時性強等特點,很好地解決了目前空間信息技術發展實時性與準確性的頸瓶[5-6]。與傳統檢測方法相比,移動式三維激光掃描新技術效率大大提高,是未來隧道檢測技術的重要發展方向之一[7]。
地鐵隧道限界是保證城市軌道交通列車運行安全的重要指標。隨著軌道交通建設的不斷發展,地鐵相關的限界測量、斷面測量、變形監測、地鐵三維地理信息系統等信息對地鐵建設、運營技術管理方面起著重要作用。本文基于移動式三維激光掃描技術對新建車站、區間隧道進行三維激光掃描作業,其結果旨在為地鐵安全運營提供科學的數據支撐,同時為相關工程項目提供參考依據[8-10]。
1 三維激光掃描基本原理與方法
三維激光掃描系統主要由掃描系統、控制系統和計算機系統三部分組成,三維激光掃描儀通過高速轉動的馬達來使掃描頭部轉動,與此同時激光發射器發出激光,激光經過待測物體表面反射回到掃描系統,被掃描系統中的激光接收器接收,激光接收器根據激光反射回來的水平向掃描角度α和豎向掃描角度β、激光束從發射到被接收的往返傳播時間t、信號強度等信息,由往返時間t求出掃描儀到目標物體之間的距離S,再配合掃描儀自身的位置信息,就可以反演得到目標物體表面的三維坐標信息及反射強度信息等。
在測量過程中每一臺三維激光掃描儀都有自身的坐標系統,儀器的中心就是自身坐標系的原點,X軸與Y軸相互垂直位于水平掃描視場,Z軸垂直于X、Y軸構成的平面位于豎向視場,如圖1所示。
根據圖1 幾何關系,即可得到目標物體的三維坐標計算公式。
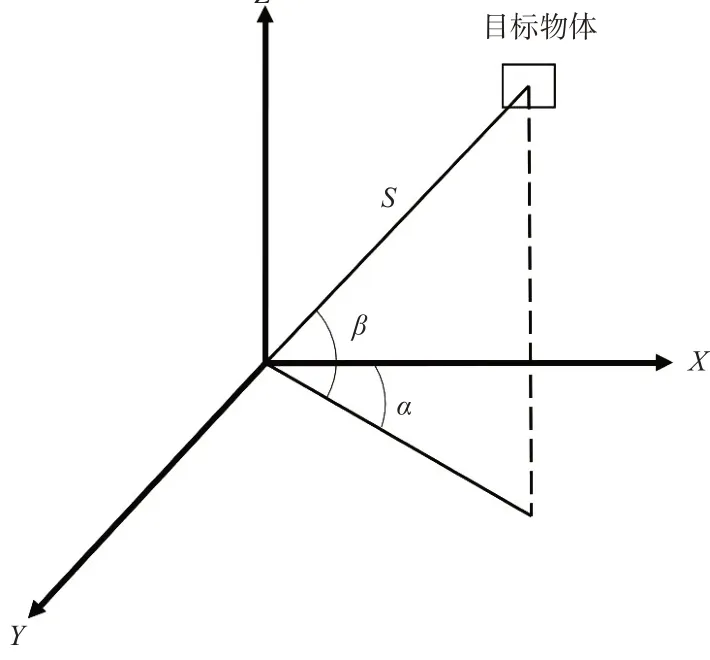
圖1 三維激光掃描原理圖
式中,S為掃描儀到物體的距離;α、β分別為水平向掃描角度和豎向掃描角度。
2 項目概況
本項目主要完成某新建地鐵車站、區間隧道三維激光掃描任務,對掃描數據進行分析、形成成果報告等,其中車站僅掃描站臺部分,站臺長約120 m,區間隧道約1.5 km。在線路正式開通前,以三維激光掃描方式開展新線普查,可以全面了解新線結構現狀,為新線接收、缺陷整改、試運行期間地鐵結構維修提供科學依據。
3 作業流程與數據處理
三維激光掃描作業先進行外業作業再進行內業數據處理,外業掃描作業主要是數據采集的工作,內業數據處理相對復雜。本次三維激光掃描內業數據處理流程如圖2所示。
由圖2 可知,三維激光掃描的外業作業采集的數據會通過掃描系統將采集所得數據進行數據預處理,主要包括將原始數據進行數據轉換、線性化、軌跡解算處理等等,掃描系統數據預處理后得到點云數據;點云數據進行格式轉換、點云去噪處理;將得到點云數據通過Cyclone 軟件處理,得到區間隧道橢圓度、水平直徑和限界等信息。最終的成果輸出資料主要包括區間隧道、車站三維空間信息、區間隧道、車站點云數據模型、正射影響圖、區間隧道橢圓度、水平直徑和限界等成果資料。

圖2 數據處理流程圖
4 案例分析
4.1 橢圓度分析
目前地鐵隧道基本上都采用盾構法施工,區間隧道在設計施工時為圓形,但在施工后會變形為離心率很小的橢圓,橢圓度的大小可以表示施工的工藝質量。對區間隧道三維激光掃描結果中橢圓度進行可視化分析,結果如圖3所示。
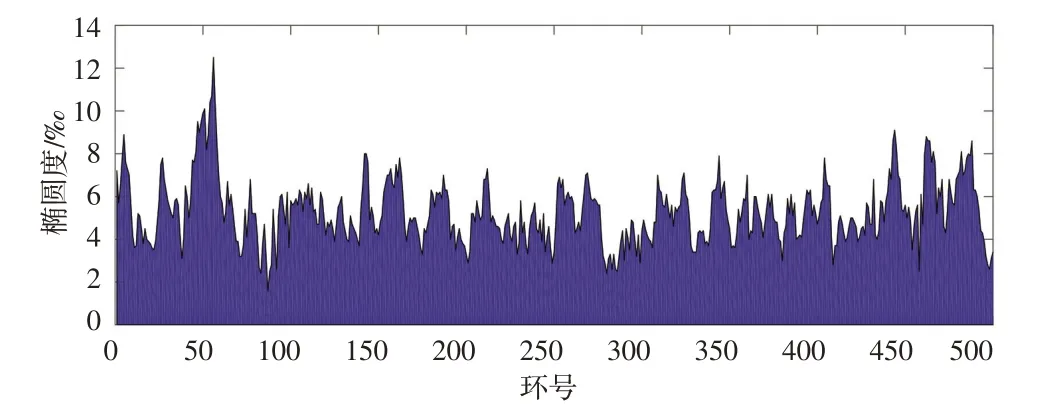
圖3 橢圓度可視化結果
由圖3 可知,橢圓度最大在56 環,表現為12.5‰,橢圓度最小表現在87 環,橢圓度為1.6 ‰,總體而言,500 個管片橢圓度基本在10‰以內,整體拼裝質量可靠。
4.2 水平直徑分析
標準盾構隧道為圓形,外徑6.3 m,標準隧道水平直徑為5.5 m,襯砌采用拼裝管片,管片厚度0.35 m。對區間隧道三維激光掃描結果中水平直徑與標準內徑進行偏差分析,對其結果進行可視化分析,如圖4所示。
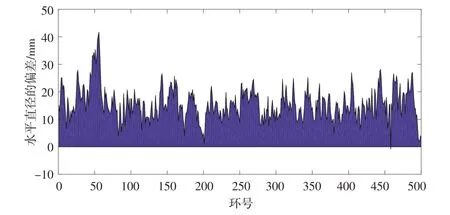
圖4 水平直徑偏差可視化結果
由圖4 可知,隧道水平直徑與標準直徑間存在偏差,99.9%隧道水平直徑整體大于標準直徑,只有一環管片小于標準直徑;隧道水平直徑與標準直徑間最大偏差為41.7 mm,最小偏差為-0.8 mm,平均偏差為15.7 mm。
4.3 限界分析
以軌面中心線為基準,導入設計限界圖,計算掃描點云與限界邊線的最小距離,判斷車輛是否侵限,同時確定侵限長度大小。對車站28道滑動門進行限界檢測分析,結果表明共計存在15道滑動門侵界,分析查看后確認均為防踏空膠條侵界,不影響行車安全;15道滑動門侵界長度最大值為30.2 mm,最小值為2.2 mm,平均值為17.6 mm。
5 結 語
本文基于三維激光掃描技術對某新建地鐵車站、區間隧道三維激光掃描作業,并對其成果進行分析,結果表明500個管片橢圓度基本在10‰以內,整體拼裝質量可靠,橢圓度最大為12.5‰,橢圓度最小為1.6‰。隧道水平直徑與標準直徑間存在偏差,最大偏差為41.7 mm,最小偏差為-0.8 mm,平均偏差為15.7 mm;對車站28 道滑動門進行限界檢測分析,發現共計存在15 道滑動門侵界,侵界長度最大值為30.2 mm,最小值為2.2 mm,平均值為17.6 mm。本文通過三維激光掃描技術確定了地鐵隧道限界,保障了地鐵行車安全,也為今后同類項目提供參考依據。
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年12期)2019-05-21 02:55:32
學苑創造·A版(2015年11期)2016-01-14 09:03:27
中國火炬(2010年8期)2010-07-25 11:34:30