巖質邊坡節理信息數字識別及三維模型重構
——以石家莊市南障城鎮邊坡為例
2023-03-15 09:07:14劉寧袁維高嶺白雪山翟星李建朋王安禮徐江
科學技術與工程 2023年3期
劉寧,袁維*,高嶺,白雪山,翟星,李建朋,王安禮,徐江
(1.石家莊鐵道大學土木工程學院,石家莊 050043;2.河北省交通規劃設計院有限公司,石家莊 050300;3.河北省地質環境監測院,石家莊 050022;4.河北省地質資源環境監測與保護重點實驗室,石家莊 050022;5.貴州省喀斯特地區水資源開發利用工程技術研究中心,貴陽 550002)
在大型工程建設中,無論是公路鐵路還是水利水電都難免會跨越或者下穿巖質邊坡,所以需要保證巖質邊坡具有良好的穩定性。巖質邊坡穩定性分析一般需要首先進行野外勘察收集數據,然后進行相關試驗分析獲取力學參數,最后運用數值模擬等方法對巖質邊坡進行計算評估。野外勘察收集數據通常采用人工測量和原地取試樣的方法[1],該方法會受到復雜的地形地貌條件制約,使正常的勘察調查工作無法開展,并會威脅測量人員的安全,而試驗環節獲取參數的過程漫長,且存在人為操作的誤差,影響試驗結果,因此,需要找到一種快捷、高效的獲取地質數據并得到相關參數的方法。
國內外學者對上述問題進行了廣泛的研究,無論是地形地貌的測量方面,還是根據地質數據進行相關參數的提取方面都取得了不少成果。梁玉飛等[2]把激光三維掃描技術應用到地質工程中,通過激光三維掃描獲取研究區域滑坡的點云數據,以此為基礎進行節理信息的提取,為地質災害分析提供了數據支撐。嵇美偉等[3]利用近景攝影測量技術提取了巖石節理信息,結合Python編寫的兩種算法實現了用非測量相機完成高精度信息的提取。激光三維掃描技術和近景攝影測量技術近些年被應用在各種工程,同時其缺點也暴露了出來,如有障礙物遮擋或者在險峻的地形下,這兩種方法實現的過程就變得復雜。隨著小型無人機的發展,其以快捷、高效地獲取數據等優點被廣泛應用于地質調查中。Goncalves等[4]采用無人機攝影測量方法,通過設置地面控制點,進行繪制和監測了沿海地區沙丘和海灘的情況,再結合三維重建軟件對沙丘和海灘的地形進行模型重構,結果表明無人機可獲取高精度的圖像,構建的三維模型也符合實際。周成凱等[5]利用小型無人機對高位危巖進行了數據采集,通過采用赤平投影和圖像識別相結合的方法對危巖穩定性進行評價,為地質信息獲取提供了一種新方法。連會青等[6]利用無人機傾斜攝影測量技術獲取地質數據,然后利用Context Capture軟件進行三維重構,再把三維模型導入軟件Acute 3D viewer中實現了對地質信息的識別提取,結果表明得到的數據和野外地質調查的數據一致性較好,具有實用意義。戴均豪等[7]利用小型無人機對甘肅北山地區進行數據采集,再利用Photoscan軟件進行三維模型的合成,對三維模型進行解譯標志和地質解譯,得到了精細的地質圖。
可見,小型無人機在地質調查中扮演的角色越來越重要了,同時也暴露出現階段的研究存在著不足:①從航測照片到三維模型的重建,再到地質信息的識別與提取,其過程要經過多個軟件的導入與導出,十分麻煩;②上述的三維模型重構軟件多為商用軟件,精度達不到巖土工程的要求;③地質信息識別與提取的軟件較少,且不一定是符合工程需求。這些不足之處也是目前重要的研究方向,學者們做了很多嘗試。楊帥等[8]引入多視圖立體視覺算法,通過對無人機位姿數據的研究提出了一種無人機影像匹配的新算法,結果表明新的方法無論在查準率還是查全率上都有明顯的替身。王楠[9]引入了區域生長法用于特征點的匹配,并對用于三維模型重構的隨機抽樣一致性算法進行了改進,減小了三維重構過程中的誤差,使得點云集的匹配結果更加準確。Riquelme等[10]提出了基于MATLAB的結構面識別算法,采用了領域尋點的方法,搜索相同特性的點分為一組并對其進行去噪處理,可以高效找到巖體結構面并計算其產狀。余宏明等[11]利用無人機攝影測量的方法,獲取了測區高精度的航拍影像,通過空三計算得到了測區地形地貌的三維模型,以此為基礎結合GeoStudio數值模擬軟件,對其滲流場和穩定性進行分析,為計算降雨條件下滑坡的穩定性提供了一種快捷的方法。宋珺敏[12]以圖像數據為基礎,結合點云空間數據,得到以平面形態出露的結構面,再利用點云聚類的方法得到了巖體結構面節理信息,該方法的到的節理信息較符合實際。Liu等[13]利用無人機攝影技術采集邊坡數據,并以此為基礎建立三維模型,然后利用三維非連續變形分析軟件模擬危巖的移動,最終得到邊坡穩定性結果。金愛兵等[14]利用小型無人機獲取邊坡地形數據并建立三維模型,將三維模型與有限差分法軟件FLAC3D相結合,得到邊坡穩定性結果。
綜上分析,現今學者的相關研究有兩方面不足,首先大多數的研究主要是利用無人機攝影技術建立三維模上的研究和基于點云數據對巖體進行節理面信息提取算法的研究,而從航拍影像到節理面信息提取的整個過程的研究相對較少,即使有也大多利用商業軟件輔助完成。其次,當測區存在大面積的植被時,三維建模的難度大大提升,有關采用無人機攝影測量技術對野外露頭巖質邊坡進行三維重構的研究相對較少。現針對以上問題運用無人機采用傾斜攝影測量技術對野外露頭巖質邊坡進行數據采集,基于增量式運動結構恢復算法和深度圖融合的多視點立體視覺算法(multi-view stereo,MVS)對巖質邊坡進行三維模型重構,然后再此基礎上進行結構面的識別,提取節理信息。根據上述過程,開發設計基于傾斜攝影的裂隙巖體邊坡三維模型重構系統,為無人機在邊坡工程中的應用提供了完整方法。
1 傾斜攝影技術
1.1 傾斜攝影技術要點
攝影測量是通過采集、處理、提取和表達調查區域的影像信息來獲取現場信息的方法。在傳統攝影測量中,一般要通過測區的分布總圖布置拍攝點,然后手工拍攝,這樣不僅耗時還十分煩瑣,并且傳統的攝影測量主要采用的是正直影像,僅對地形地貌上部區域有較好識別的信息,而無法獲取沿高度方向的地貌信息。傾斜攝影的出現,彌補了正直影像的不足,通過同一架無人機實現垂直、傾斜等不同角度的同時拍攝,進而獲取更加準確的測區信息,其生成模型的精度是傳統攝影測量精度的2~3倍[15]。在傾斜攝影時一般需要對下視、前視、后視、左視和右視5個方向進行拍攝,現采用單鏡頭小型無人機進行傾斜拍攝,無人機通過規劃不同的航線進行采集數據,得到測區的完整場景信息。為了確保得到的場景信息能滿足三維建模的要求,需要拍攝的影像之間具有較高的重疊度和一致的地面分辨率。其中重疊度可以通過規劃無人機航線的旁向和航向的交叉大小來控制,因此地面分辨率是能否準確反應出地表真實信息的重要參數之一。正直影像地面分辨率的計算公式為
(1)
式(1)中:GSD為正直影像時的地面分辨率;δ為像元尺寸;h為無人機拍攝高度;f為相機焦距。再結合無人機相機主光軸旋轉角度,可得到傾斜攝影時近點、中心的和遠點的大地分辨率GSDj、GSDz和GSDy,公式為
(2)
(3)
(4)
式中:a和b分別為傾斜角度和視場角的一半,其中b的計算公式為
(5)
式(5)中:γ表示相機內部圖像傳感器的大小在一個方向的計算。
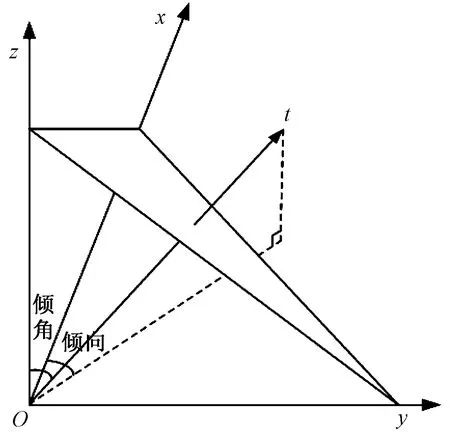
傾斜攝影的幾何關系如圖1所示,其中T′為影像中的一個點,T為T′在的實際場景中地面的對應點,PP′為影像中的主光軸與像平面的交點,β為T和傾斜攝影中心O的連線和ON豎線的夾角。從圖1中可以看出,影響大地分辨率的因素主要包括無人機拍攝的高度、焦距、像素值、傾角等,其中焦距和像素值是由無人機攜帶的相機確定的;飛行高度越低,大地分辨率的值越小,則精度越高;結合式(4)和圖1可知,當傾角越大時,遠點的分辨率的數值越小且遠點和近點分辨率差值越大。
1.2 數據采集
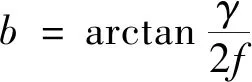
航測區域位于石家莊市井陘縣南障城鎮,周圍群山環繞,地形復雜。測區長度為437.0 m,寬度為232.9 m,邊坡高140.0 m。收集數據選用大疆御2專業版小型無人機,無人機及地面遙控器如圖2所示,無人機飛行器配備先進的全方位視覺系統及紅外傳感系統,對周圍障礙物有感應識別的功能,這樣就使得無人機可以安全完成飛行任務。無人機上搭載高精度相機,并且配合高穩定性云臺,足以滿足工程的拍攝要求。地面遙控器采用高清圖傳技術,可以控制無人機在最大8 km通訊距離內完成飛行任務,無人機技術參數見表1。結合無人機操作端自帶的 DJI Pilot軟件,可以實現對飛行航線的規劃,得到垂直影像和傾斜影像。本文中在測區總共設置五條航線,第一條航線鏡頭豎直向下,其他航線鏡頭傾角60°,飛行航線如圖3所示,每種顏色代表一條完整的航線,傾斜攝影具體飛行軌跡是無人機從航線1起點出發,飛到指定高度完成航線1的任務,然后從航線1的最后位置飛向航線2的起點繼續拍攝任務,直到所有航線任務完成回到航線1起點降落,由于邊坡最高140 m,故飛行高度設置為200 m。在傾斜攝影測量過程中,為了能得到詳盡的數據,航向重疊度設置為80%,旁向重疊度設置為70%,等距離拍照,具體航線規劃設置和航線參數信息如表2所示。
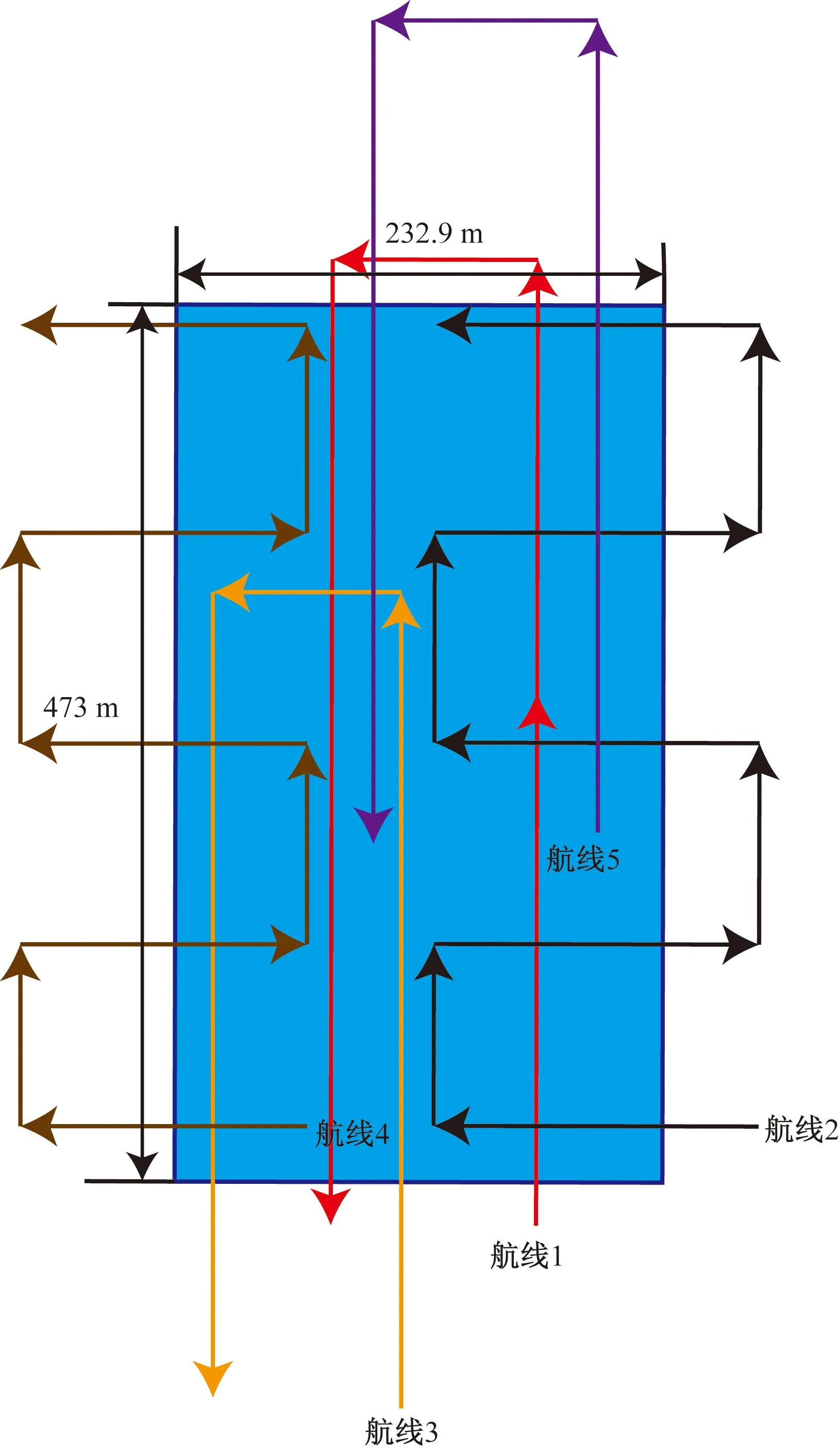
圖3 航線規劃圖Fig.3 Route plan
表1 無人機技術參數Table 1 Technical parameters of UAV
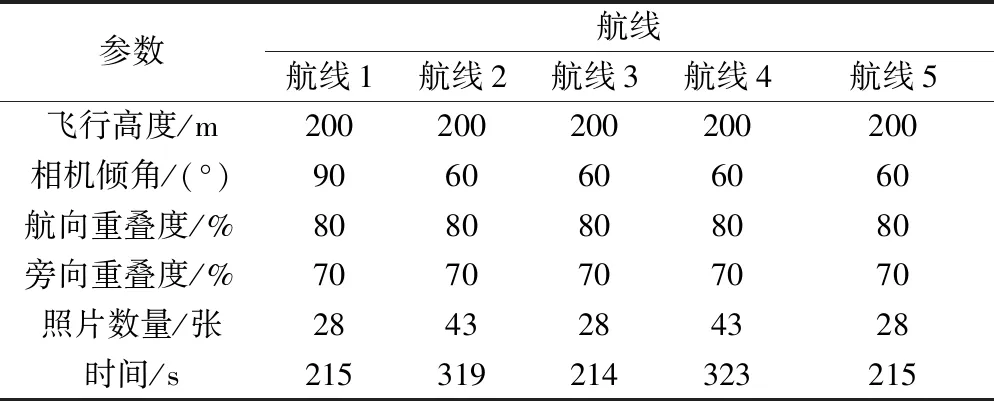
表2 航線參數Table 2 Route parameters
2 三維模型重建及節理信息識別
2.1 基本流程
由于小型無人機搭載相機相幅較小,且對旁向重疊度和航向重疊度要求很高,得到的航片照片數量較多,為了滿足能同時識別較多的照片,本文中選擇基于增量式運動結構恢復算法(structure-from-motion,SFM)[16]和深度圖融合的MVS算法對巖質邊坡進行三維模型重構,在此基礎上進行節理信息數字識別。具體技術流程見圖4。
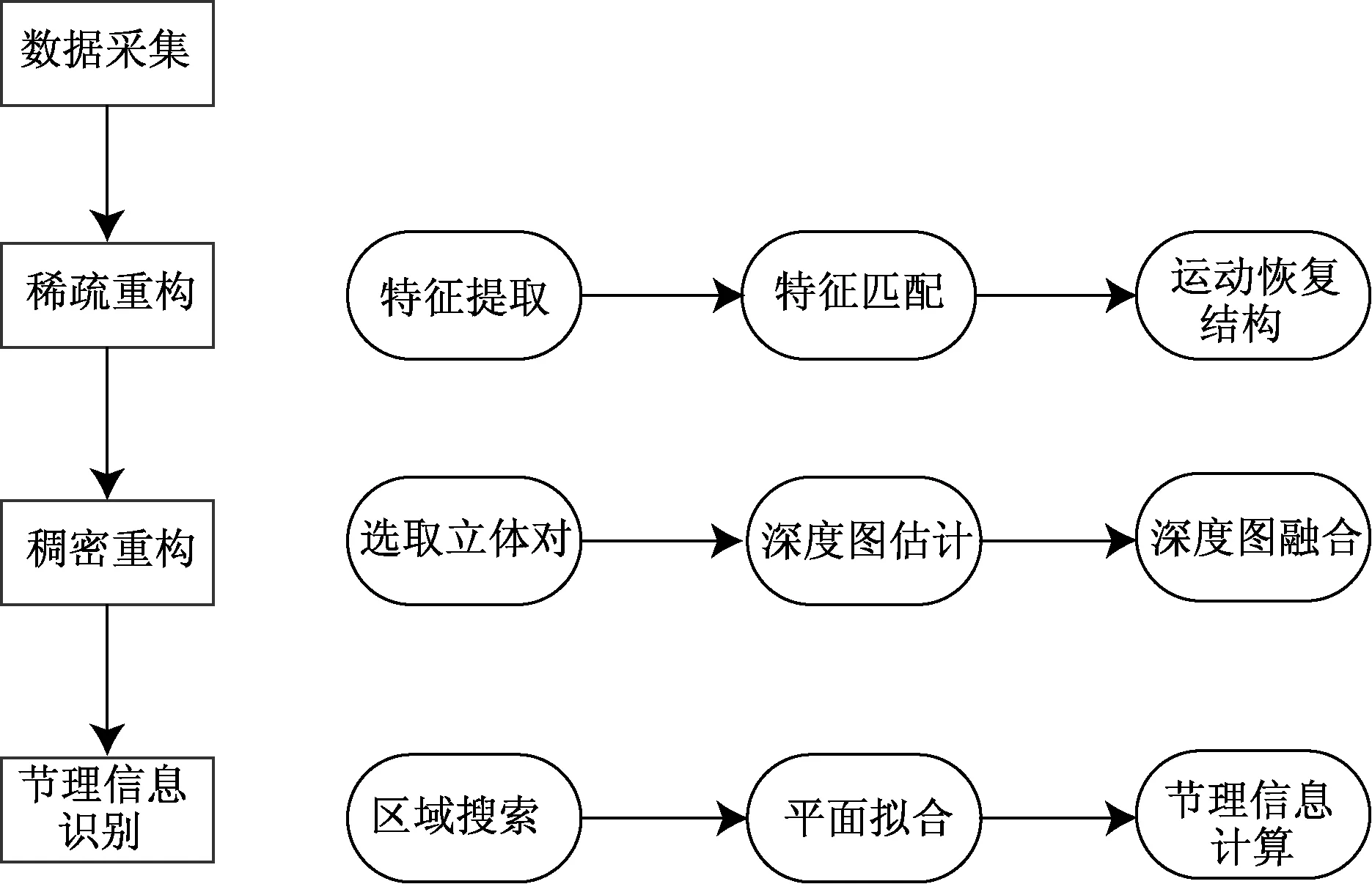
圖4 技術流程圖Fig.4 Technology flow chart
在開源軟件COLMAP的框架的基礎上,對其進行二次開發,利用了COLMAP軟件開源庫里的增量式SFM算法、深度圖融合的MVS算法和PCL軟件開源庫里的隨機抽樣一致算法(random sample consensus,RANSAC)、區域生長法,將其重新編譯為既能進行三維模型重構又能進行巖體結構面識別提取的基于傾斜攝影的裂隙巖體邊坡三維模型重構系統,實現了由傾斜攝影測量技術得到的數據生成三維模型和結構面自動識別的功能,軟件界面如圖5所示。
2.2 稀疏重構
采用增量運動恢復結構(增量式的SFM算法)進行稀疏重構[17],該算法通過相機的運動同時恢復相機的參數和場景結構,其主要流程包括:特征點的提取、特征點的匹配和捆綁調整優化相機姿態和場景結構。
(1)特征點提取:小型無人機進行拍攝任務時會因不可控因素使得拍攝的照片產生畸變,畸變的影響會影響到三維重構的精度。選用SIFT(scale invariant feature transform)算法對畸變的照片進行處理,能較好地完成特征點的提取任務[18]。SIFT算法是通過在尺度空間中計算極值點來檢測穩定的點的特征。其中尺度空間定義為
L(x,y,σ)=G(x,y,σ)I(x,y)
(6)

(7)
式中:(x,y)為點的坐標;σ為尺度大小;G(x,y,σ)為尺度σ的可變高斯函數;I(x,y)為原圖像大小。SIFT點特征檢測在高斯差分尺度空間中進行,目標函數為
D(x,y,σ)=[G(x,y,kσ)-G(x,y,σ)]I(x,y)
(8)
式(8)中:k為比例系數。
利用高斯差分對數據進行計算,得到取得極大值與極小值時的三維點,這些三維點為離散的潛在特征點,然后將這些潛在特征點進行曲面擬合,擬合曲面的峰谷或者峰底即為最終特征點。通過本文研發的軟件檢測的特征點結果如圖6所示(見圖中紅色點為特征點)。
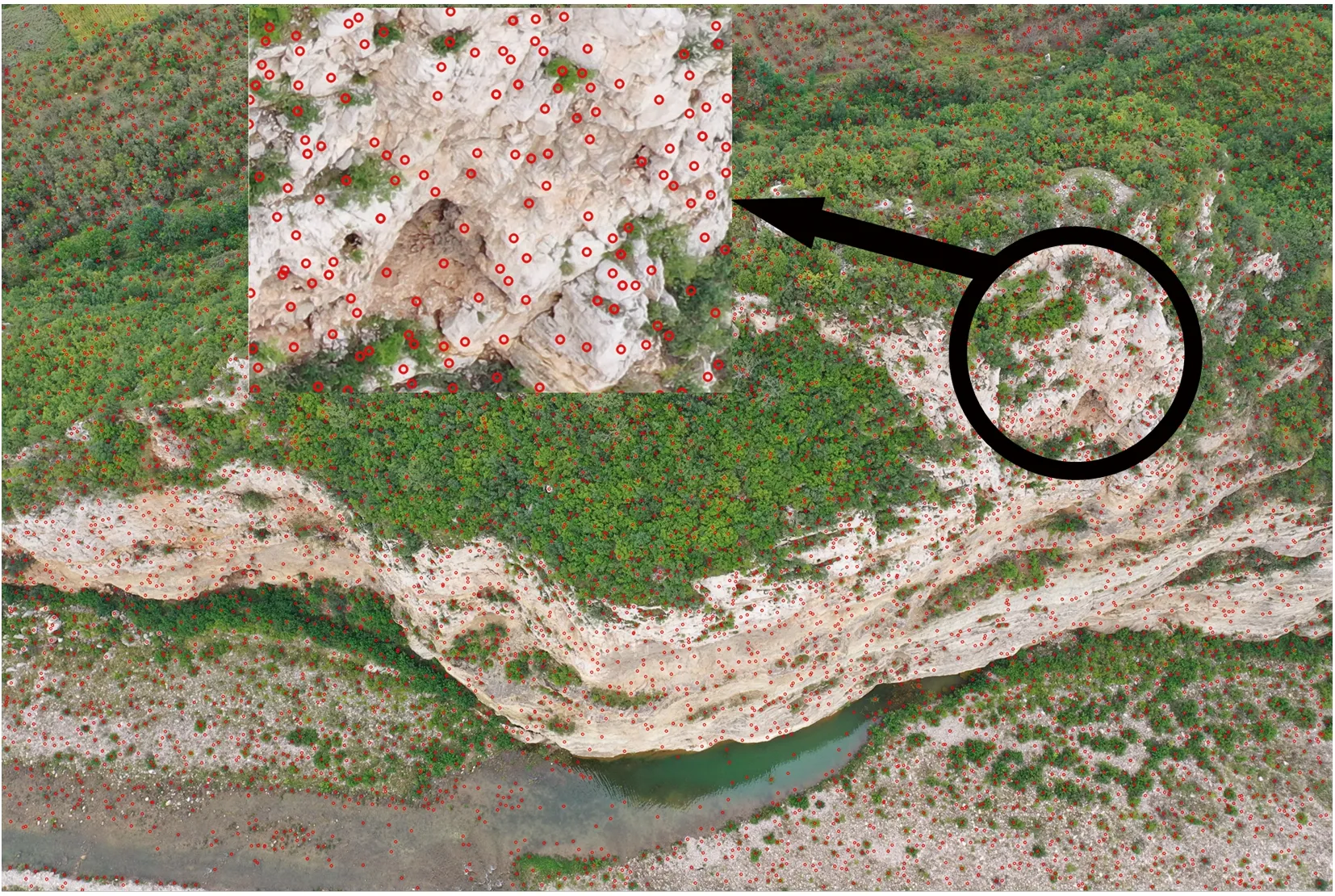
圖6 SIFT特征檢測結果圖Fig.6 SIFT feature detection result graph
(2)特征點匹配:由于采用無人機進行采集數據,數據中包含定位系統坐標(global positioning system,GPS)和飛行姿態,故選擇空間匹配的方法。空間匹配的原理是首先給定一個查詢點,然后利用K最近鄰算法計算距離查詢點距離最近的點記為候選點,最后判斷候選點到查詢點距離是否超過了最大距離,沒超過最大距離的候選點加入特征點集,超過的最大距離的候選點剔除,完成特征匹配。
(3)增量的運動恢復結構:首先選取一對圖像進行重建,再利用三角量測的方法對相機進行旋轉、平移和三角化計算得到一個空間三維點,再把這個三維點重新投影到兩個視角中計算重投影誤差,誤差較小則重建成功。其中重投影誤差函數為

(9)
式(9)中:Pj為相機參數;Mi為三維點坐標;mij為第j幅影像上的第i個觀測點;f(Pj,Mi)為觀測點對應的投影點。
在此基礎上增加新的圖像重復上述過程,直至計算完所有照片,得到由空間三維點組成的稀疏場景模型,增量式SFM過程見圖7。
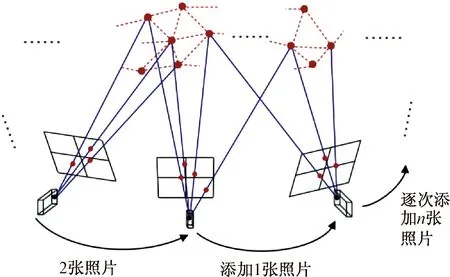
圖7 增量式SFM過程圖Fig.7 Incremental SFM process diagram
完成上述所有計算即可得到稀疏三維點云模型,通過本文研發的軟件得到的稀疏點云圖如圖8所示,圖8中紅色區域描述了無人機采樣時的位置及相機角度。
2.3 稠密三維重建
由圖8可以看出稀疏三維點云模型整體比較粗糙,不能直觀地反映出巖質邊坡的狀態。故以稀疏三維點云模型為基礎,采用基于深度圖融合的方法,對巖質邊坡進行稠密三維重建。
基于深度圖融合的方法是通過對每幅影像重建深度圖進而建立點云模型,由于不同影像拍攝的位置不同,看到的場景就會有所偏差,這些偏差即為視差,視差可以反映出物體在三維空間的深度。深度圖融合的MVS算法的基本流程:首先,在航測照片集中選取航測的照片,對每一張航測的照片選取若干張照片作為鄰近照片,用稀疏三維重建階段的結果作為判斷是否具有較高的相似性的標準,確保稠密三維重建的準確性。然后對初始的稀疏特征點開始深度估計并且把這些稀疏特征點作為種子點,用PatchMatch算法進行深度圖估計,該算法是通過像素點q的像素坐標(qx,qy)和一個參數fq(aq,bq,cq)描述視差qd,公式為
qd=aqqx+bqqy+cp
(10)
PatchMatch算法中,每個像素初始化深度值是指用隨機數為fq的三個參數設置初始值,然后把每個像素的深度信息傳遞到鄰近像素,根據匹配代價判斷是否更新鄰近像素深度信息,最后不斷循環迭代得到場景的深度信息。該過程中深度信息優化的數學模型為

(11)
式(11)中:IR為參考影像深度值;Ik為第k個視角的深度值;ck為第k個視角的深度尺度因子;(i,j)為位置坐標。
通過上述步驟,計算出每幅照片的深度圖,如圖9所示(不同顏色代表巖質邊坡不同位置距離無人機的不同距離)。當計算出數據集中所有的圖的深度圖,把他們相互融合即可得到高程圖,如圖10所示,從高程圖中可以看出,最高處的高程為140 m與實際測量值吻合。
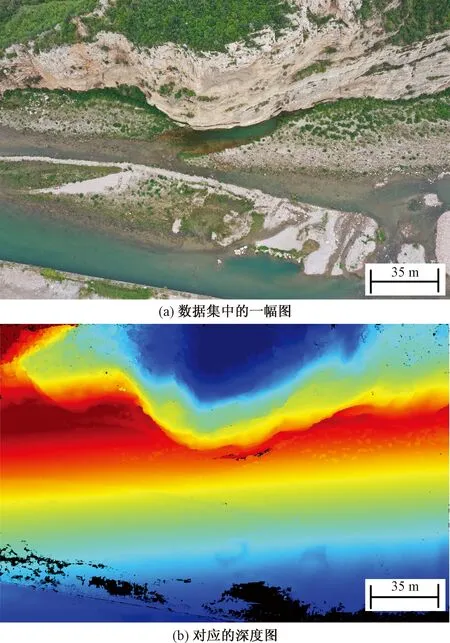
圖9 深度圖及其原圖Fig.9 Depth map and its original
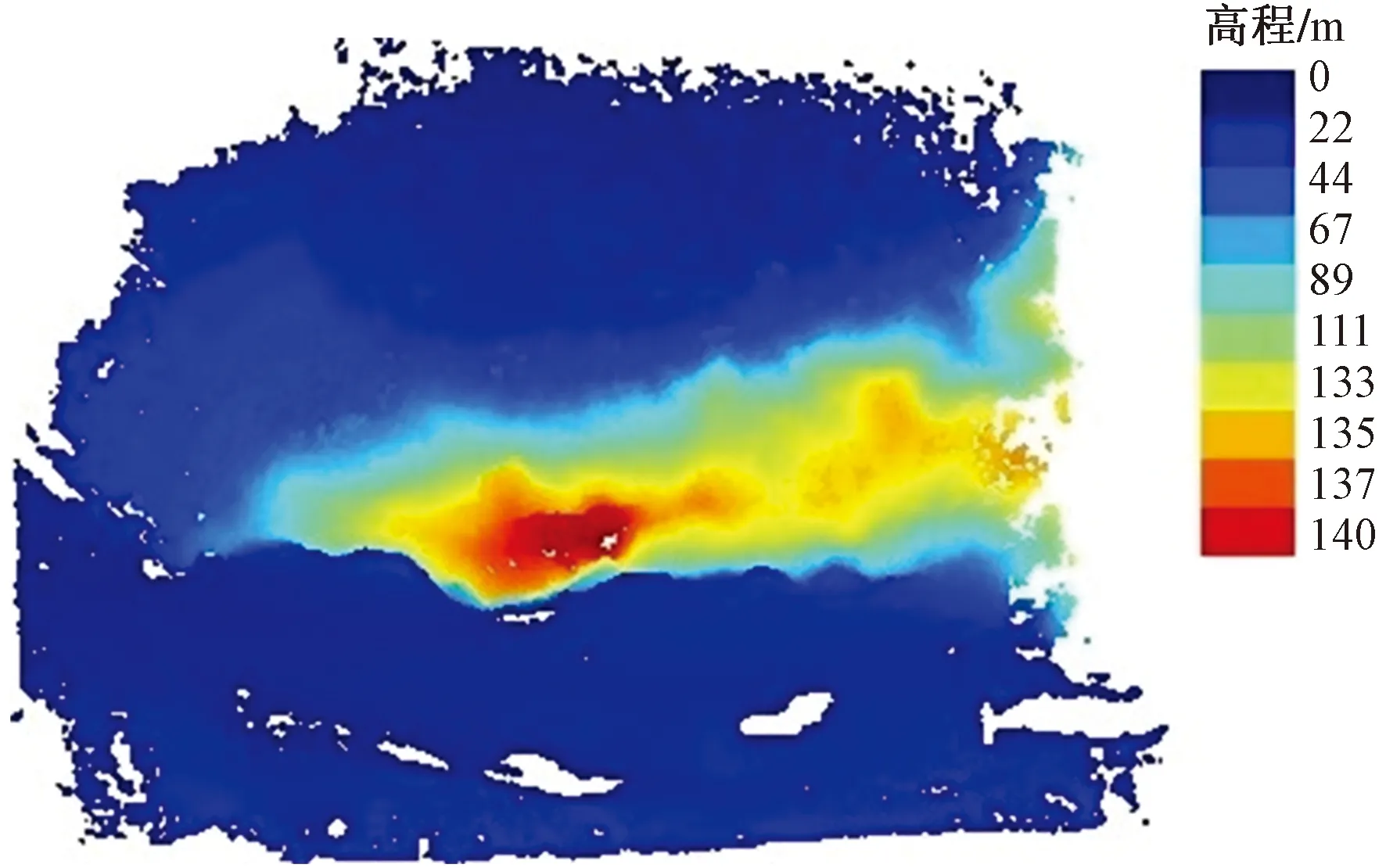
圖10 高程圖Fig.10 Digital elevation map
最后,將深度圖進行融合就能得到稠密三維模型及高程圖。通過本文研發的軟件得到稠密點云三維模型如圖11所示,可以看出稠密三維重建的模型能較好地還原巖質邊坡。
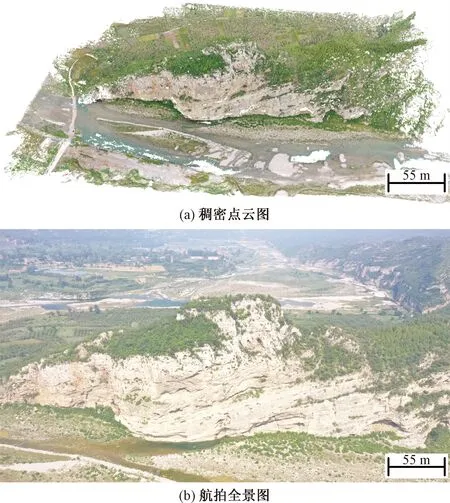
圖11 稠密點云圖和航拍全景圖Fig.11 Dense point cloud and aerial panorama
2.4 節理信息識別
經上述計算,得到了巖質邊坡三維模型,模型中包含著空間幾何特征信息,因此可以對三維點云模型進行結構面的識別與提取相關信息。
結構面識別過程包括兩個方面,分別為結構面的區域搜索和結構面的平面擬合。采用區域生長法[19]進行結構面區域搜索,由于輸入的數據為稠密點云模型,其三維特征點的數目龐大,使得計算時間過長且效率低下,所以首先減少三維點云的數據且保持三維點云的形狀特征不變,該過程就是對稠密點云模型進行下采樣,下采樣后把候選點中曲率最小的點作為初始生長點,搜索鄰域,比較鄰域中點的法向量和初始生長點法線之間的夾角與閾值的大小,小于閾值的點保留到聚類數據,再比較聚類數據中的點的曲率與曲率閾值的大小,小于閾值的點并入到初始生長點的區域,并將該點作為下一個生長點向外生長,直至到沒有可以歸并的點為止。
經過結構面的區域搜索后可以得到各個結構面的點集合,然后利用RANSAC(random sample consensus)進行巖體結構面擬合和轉換[20]。在用RANSAC算法時,首先要選取有效的初始數據,在此基礎上不斷迭代增加數據集,最后選取數據最多的模型為最終模型。RANSAC平面擬合的流程如下。
(1)在三維點云數據集中選取初始點云數據,計算其對應平面方程為
Ax+By+Cz+D=0
(12)
式(12)中:A、B、C、D為平面方程參數。
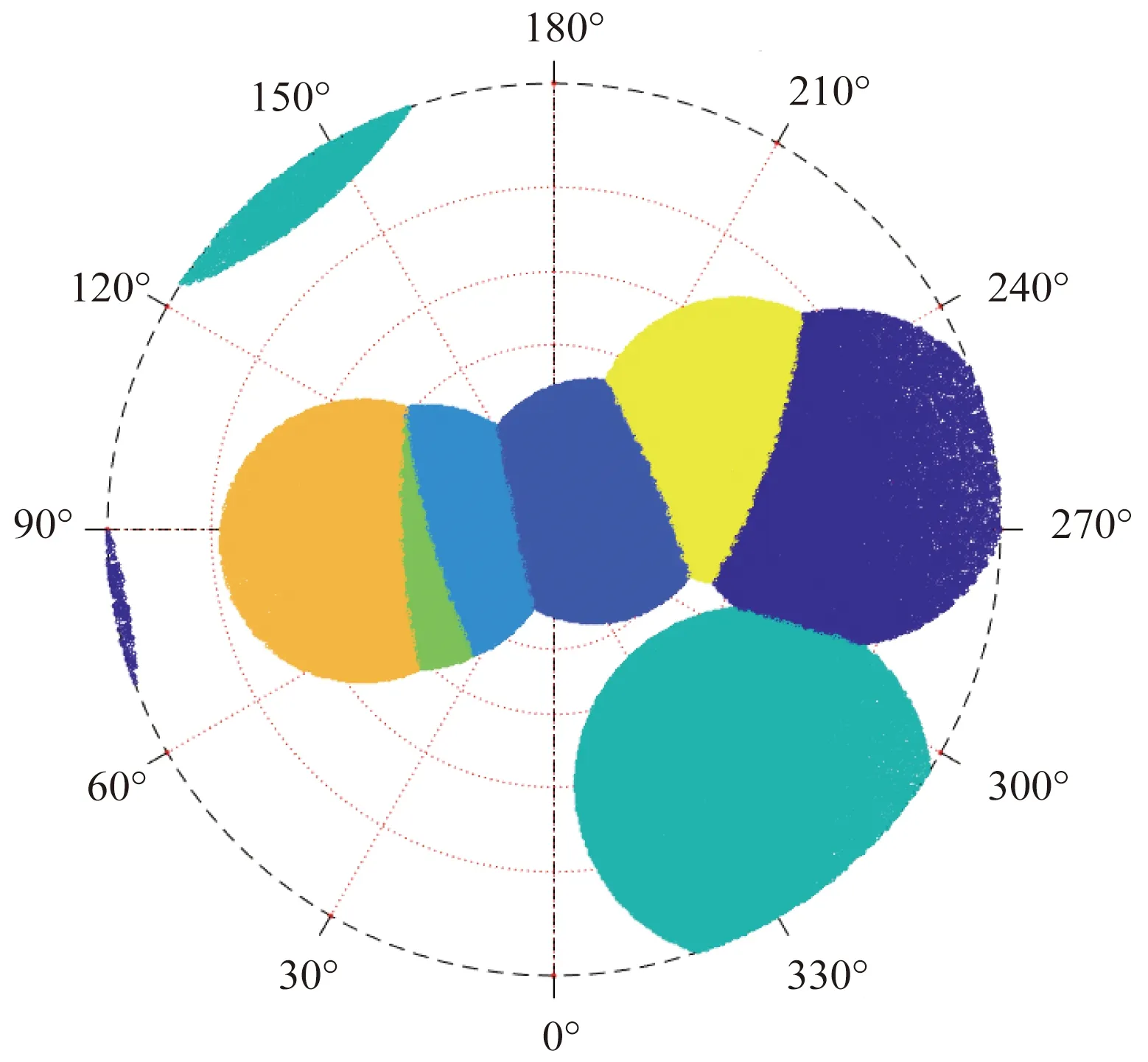
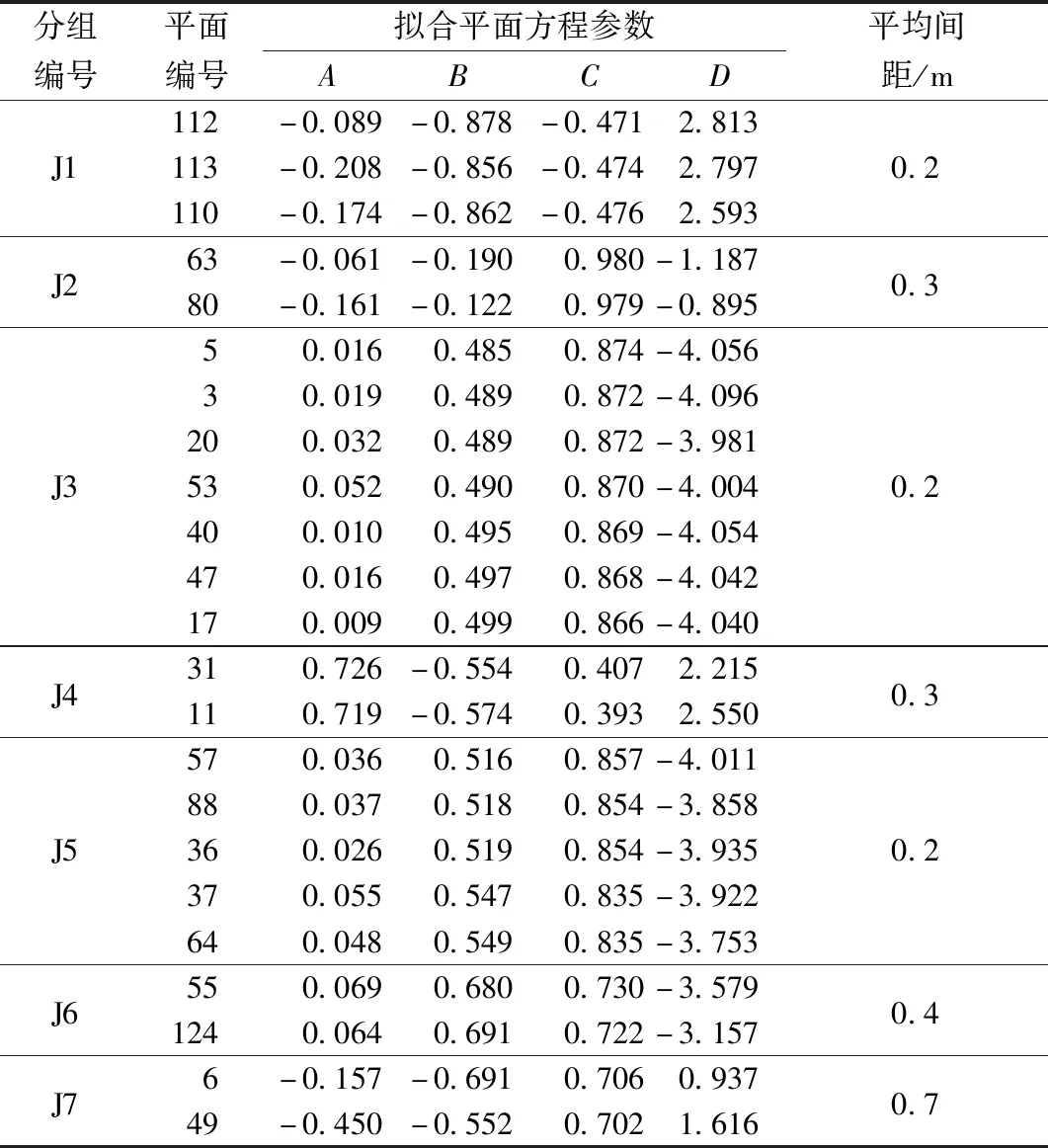
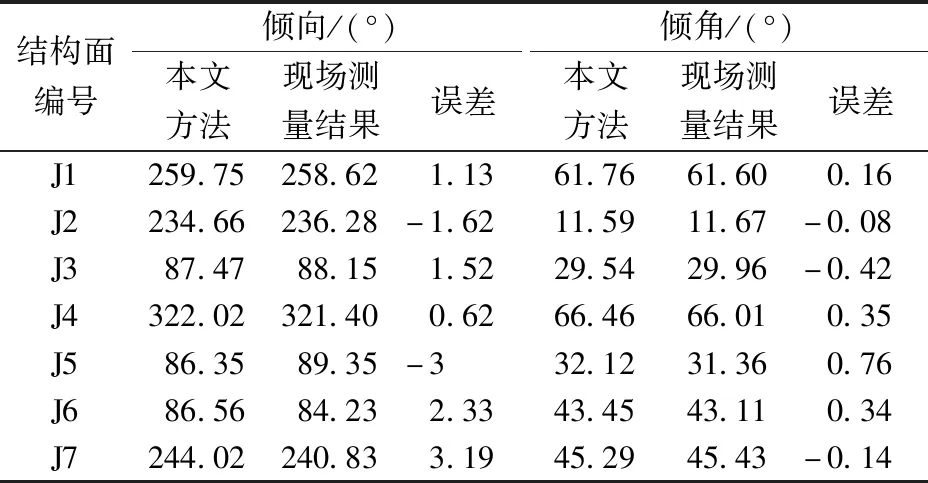
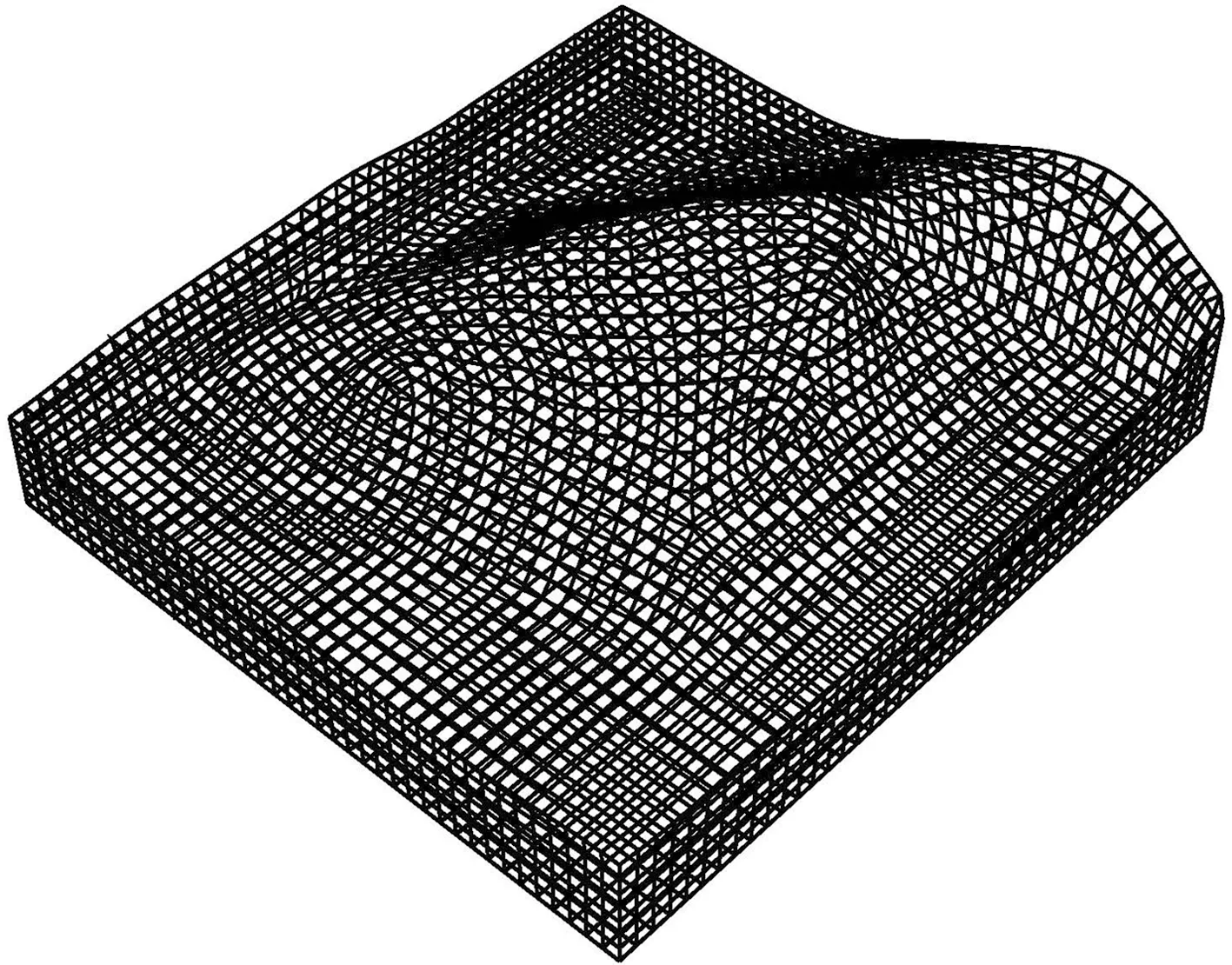
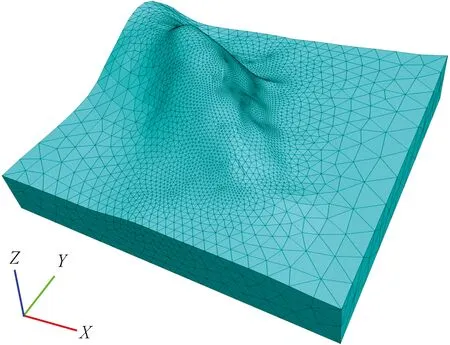
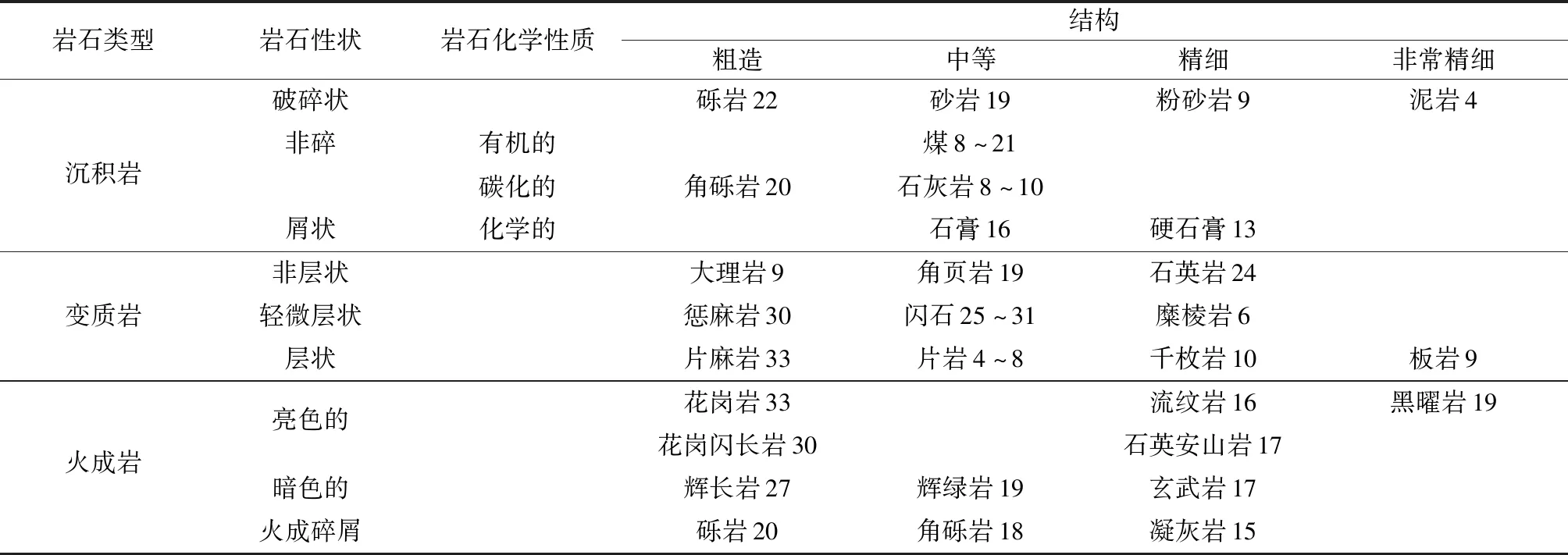
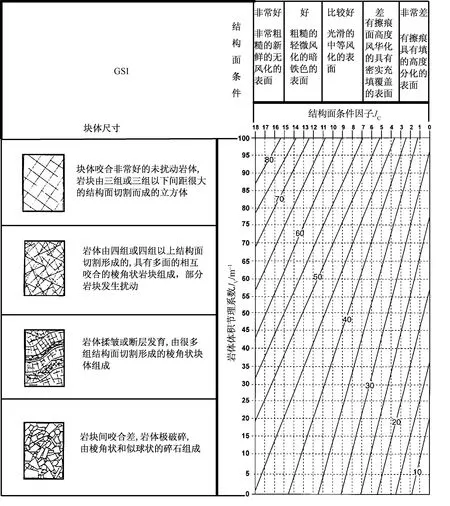
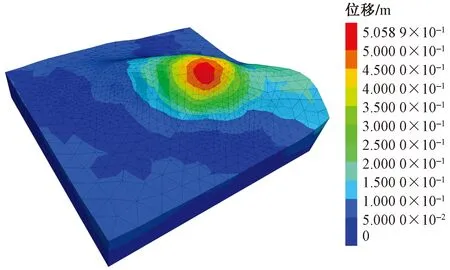
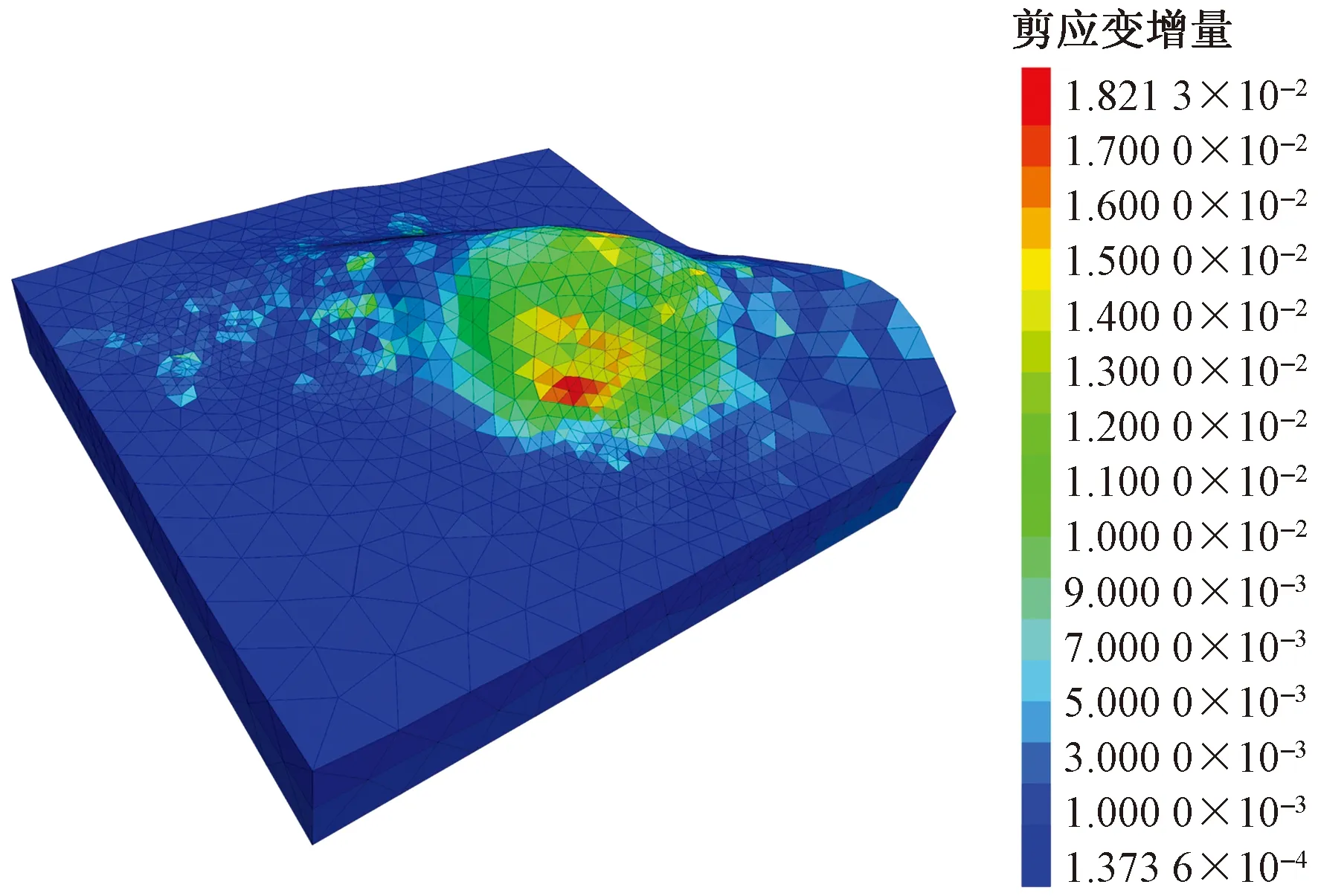
(2)計算所有點至該平面的代數距離di,選取閾值d,若di (3)重復以上步驟,根據數據集計算出迭代結束參數,根據該迭代結束參數判斷迭代是否停止。 在開源軟件COLMAP中加入了PCL編程庫中Sample-consensus模塊,實現了RANSAC平面擬合。Sample-consensus模塊中模型定義為平面模型,模型設置了4個參數normal_x、normal_y、normal_z和d分別對應著平面方程參數A、B、C和D。本文中利用基于傾斜攝影的裂隙巖體邊坡三維模型重構系統,得到的結構面識別圖如圖12所示。 圖12 結構面識別圖Fig.12 Structural plane identification map 由于三維模型的拓撲結構是基于無人機傾斜攝影拍攝的照片構建的,其坐標系和客觀世界坐標系相同,故可以根據空間解析幾何原理可以推導出結構面產狀的關系[21],推導關系如圖13所示,表達式為 圖13 結構面產狀幾何關系示意圖Fig.13 Schematic diagram of the geometric relationship of structural planes (13) (14) (15) 式中:θ和φ分別代表結構面的傾角和傾向;ω為同組結構面之間的間距。 從圖13可以看出,該巖質邊坡有多組結構面,利用研發的軟件得到節理信息數據,對巖質邊坡識別出125個結構面數據,給出部分展示數據如圖5(b)所示。整理所有數據剔除錯誤結構面,得到7組顯著結構面和若干個單獨結構面,由于內容有限,僅提供顯著結構面數據,平面方程參數見表3。為證明獲得的巖體結構面傾向、傾角的可靠性,用人工現場測量的方法進行比較,如表4所示,可以看出對于7組結構面的產狀,用兩種方法計算的最大誤差為3.19,具有一致性。根據表4中的結構面產狀數據,將點云劃分成有限區域,得到結構面劃分圖,展示了巖質邊坡結構面的具體分布狀況,如圖14所示。 圖14 結構面劃分圖Fig.14 Structural plane division diagram 表3 巖體結構面數據Table 3 Rock mass discontinuity data 表4 巖體結構面產狀結果比對Table 4 Comparison of rock mass discontinuity occurrence results 小型無人機對巖質邊坡采集好數據,經過基于傾斜攝影的裂隙巖體邊坡三維模型重構軟件計算,得到地形網格模型及節理信息數據。在此基礎上,利用FLAC3D有限差分法軟件進行數值模擬。數值模擬中采用Hoek-Brown準則[22],其表達式為 (16) 式(16)中:σ1、σ3分別為巖體最大主應力、最小主應力;σc為巖體抗壓強度;mb、s、α為巖體的Hoek-Brown常量。 基于傾斜攝影的裂隙巖體邊坡三維模型重構軟件可以提取點云的X、Y、Z各坐標數據,利用勞德內算法還原地形得到邊坡地形圖,以“ply”格式進行保存,如圖15所示。利用Rhino軟件對地形網格模型進行優化,生成“.f3grid”格式文件,然后把三維模型導入FLAC3D,三維有限元模型如圖16所示,三維模型長400 m、寬400 m、高140 m。 圖15 地形網格圖Fig.15 Topographic grid 圖16 三維有限元模型Fig.16 Three dimensional finite element model 在進行邊坡穩定性分析時,巖土體均采用Hoek-Brown本構模型,計算時除了模型上表面以外,對各邊界均處采用固定端約束。式(16)中mb、s、α三個常量通常利用地質強度指標(geological strength index,GSI)對巖體參數進行確定的方法,其表達式為 (17) (18) (19) 式中:GSI為地質強度指標;D為巖體擾動因子,其取值范圍為0.0~1.0,現場無擾動巖體為0,而非常擾動巖體為1.0;mi為巖體霍克布朗常數,可以通過查表5獲得。研究區域為中等砂巖,現場無擾動巖體,查表5可知式(19)中mi=19,D=0。 表5 由巖石類型所決定的常數miTable 5 Constant mi determined by rock type 地質強度指標GSI 與巖體破裂程度和結構面的狀態有關。從上述三維重構及節理信息數字識別得出的結果出發,選用巖體體積節理數JV和結構面條件因子JC對地質強度指標GSI進行計算。根據已有的節理數據推導出適用于本研發軟件的巖體體積節理數的公式。 對于巖體體積節理數JV的統計,通常計算公式[22]為 (20) 式(20)要求每組結構面的數量兩個及兩個以上,才能算出結構面的間距。在實際測量中存在單個結構面,忽略它們將導致測量結果不準確,假設這些單個結構面的間距取各組結構面平均間距累加的平均值,在此基礎上提出了計算巖體體積節理數JV的公式,即 (21) 式(21)中:N為單獨的結構面個數;A為測區面積。 根據現場勘查可以知道本測區面積A=8 000 m2,結合表3和表4中的數據,利用式(21),求得JV=25.62。結合Sonmez等[23]得出的地質強度指標表,如圖17所示,地質強度指標表中可以看出結構面條件因子JC的大小根據結構面表面的狀況分為1~18,JC越大表明結構面表面條件越好。根據如圖11中的航拍實景圖和稠密點云三維模型,結合采集數據時的現場勘查結果可知,該巖質邊坡出露面風化嚴重且有大小不一的坑洞,表面條件較差,由此估計出JC=6。根據JV和JC的值查圖17,得到GSI的值為52。為了驗證結果的可靠性,根據Palmstrom的[24]公式進行計算,求得JV=25.60,可見JV值的大小僅差0.02,兩者結果非常相近,證明了本公式的可靠性。 圖17 GSI量化表Fig.17 GSI quantitative table 利用式(17)~式(19)可計算出Hoek-Brown準則中的參數mb、s和α,結果見表6。 表6 Hoek-Brown準則參數Table 6 Hoek-brown criterion parameters 基于強度折減法對巖質邊坡的安全系數進行計算,將巖質邊坡土體的抗剪切強度參數逐漸減小,直到體系不平衡力與典型內力比率小于10-5,認為體系達到了力的平衡,即完成計算,利用model factor-of-safety命令即可實現該過程。在求解過程中FLAC3D軟件能自動搜索出巖質邊坡最危險的位置,分析其在臨界狀態下的穩定性。計算結果表明:圖18為臨界狀態下巖質邊坡總體位移云圖,可以看出,巖質邊坡最危險的位置在靠近山頂的陡坡處,最大位移為51 cm。巖質邊坡失穩通常是沿著剪應變增量最大的位置發生,因此需要找尋巖質邊坡剪應變的集中帶,圖19為臨界狀態下巖質邊坡最大剪應變增量云圖,可以看出,只有靠近坡腳處小部分的剪應變增量較大,其他處剪應變增量都較小且變化均勻,說明該邊坡整體穩定性較好,但是在剪應變增量較大的區域容易發生剪切破壞,與現場勘察結果一致。 圖18 臨界狀態下巖質邊坡位移云圖Fig.18 Displacement cloud map of rock slope in critical state 圖19 臨界狀態下巖質邊坡最大剪應變增量云圖Fig.19 Maximum shear strain increment cloud map of rock slope in critical state 以南障城鎮巖質邊坡為工程背景,利用小型無人機對邊坡進行拍照,再通過開發的三維重構軟件,得到點云圖、地形網格圖和結構面產狀等。利用得到的數據,結合Hoek-Brown準則,運用數值模擬的手段分析邊坡的穩定性。得到如下結論。 (1)使用小型無人機結合傾斜攝影測量技術,收集到完整有效的研究區域的數據,充分體現了小型無人機在地質調查中的高效、便捷和準確等特點。 (2)基于增量式運動結構恢復算法和深度圖融合的MVS算法對巖質邊坡進行三維模型重構,得到了測區的三維模型,該模型能很好的描述出實際巖質邊坡。 (3)基于RANSAC算法和區域生長法對模型的巖體結構面進行識別提取,得到了巖體結構面的識別圖,提取到了結構面的擬合方程、結構面產狀和間距等參數,精度基本滿意。 (4)根據軟件輸出的結果,提出了一種新的巖體體積節理數計算公式,用該公式計算地質強度指標,得到結果誤差較小。結合軟件輸出的地形圖可快速建立數值分析模型,邊坡穩定性計算結果與現場情況吻合。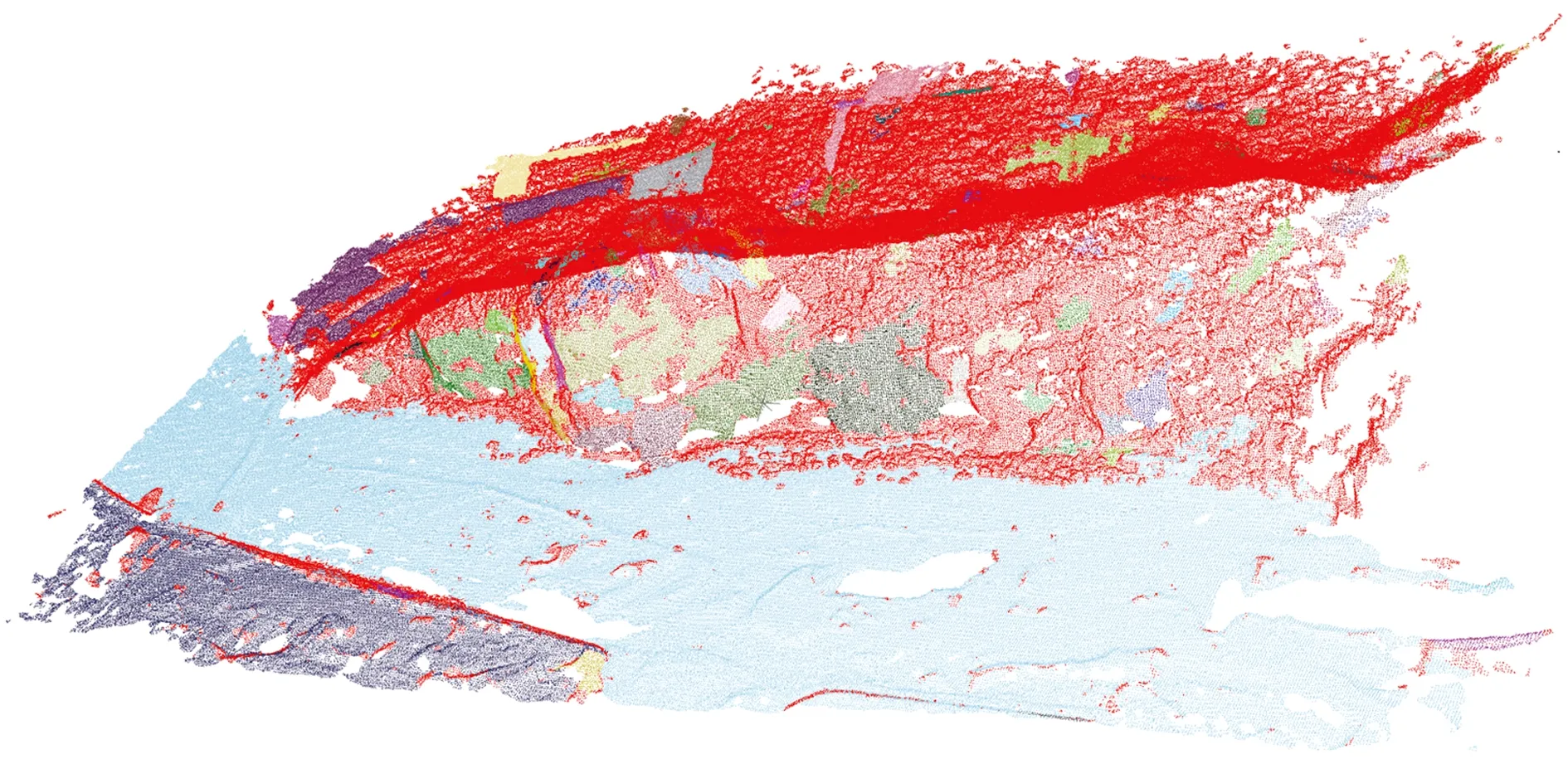
3 邊坡數值模擬計算

3.1 三維模型建立
3.2 三維模型參數




3.3 數值計算結果
4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年9期)2015-02-28 18:56:50