基于BP神經(jīng)網(wǎng)絡(luò)的星箭界面動(dòng)載荷識(shí)別
2023-03-20 02:54:16陳樹(shù)海郭安豐吳邵慶費(fèi)慶國(guó)
振動(dòng)與沖擊 2023年5期
陳樹(shù)海, 郭安豐, 吳邵慶, 費(fèi)慶國(guó)
(1. 東南大學(xué) 機(jī)械工程學(xué)院, 南京 211189; 2. 東南大學(xué) 土木工程學(xué)院, 南京 211189;3. 上海衛(wèi)星工程研究所, 上海 201109)
星箭界面動(dòng)態(tài)載荷指火箭發(fā)射過(guò)程中受到橫向載荷的作用,在星箭連接界面上產(chǎn)生的彎矩和剪力,其載荷信息是地面驗(yàn)證試驗(yàn)和可靠性評(píng)價(jià)的重要依據(jù)[1]。雖然在星箭連接界面布置力傳感器能夠直接獲取界面動(dòng)載荷,但它會(huì)改變星箭結(jié)構(gòu)的動(dòng)力學(xué)特性,真實(shí)星箭結(jié)構(gòu)一般不允許搭載力測(cè)量裝置[2];基于星箭耦合動(dòng)力學(xué)模型開(kāi)展耦合載荷分析,也能夠獲取界面處的動(dòng)載荷,但是該方法需要準(zhǔn)確的星箭耦合有限元分析模型、可靠的力學(xué)環(huán)境預(yù)示方法以及準(zhǔn)確的火箭外載荷輸入[3]。在衛(wèi)星結(jié)構(gòu)設(shè)計(jì)時(shí),依靠衛(wèi)星結(jié)構(gòu)自身的振動(dòng)響應(yīng)反演衛(wèi)星結(jié)構(gòu)受到的基礎(chǔ)加速度激勵(lì),并進(jìn)一步估計(jì)星箭界面動(dòng)載荷,能夠避免復(fù)雜火箭結(jié)構(gòu)的建模和星箭耦合振動(dòng)分析,有利于實(shí)現(xiàn)服役工況下星箭界面動(dòng)載荷的在線預(yù)測(cè)。
基于衛(wèi)星結(jié)構(gòu)響應(yīng)反演星箭界面動(dòng)載荷已有一定的研究成果。朱斯巖等[4]利用星箭結(jié)構(gòu)的Craig減縮模型,先由已知的界面自由度加速度時(shí)間歷程求解基礎(chǔ)激勵(lì),并重構(gòu)結(jié)構(gòu)全場(chǎng)加速度響應(yīng),最后代入結(jié)構(gòu)動(dòng)力學(xué)方程求解星箭界面動(dòng)載荷;Craig減縮模型能夠降低載荷識(shí)別計(jì)算量,但模型誤差也將導(dǎo)致載荷識(shí)別結(jié)果的更大誤差。張永濤等[5]基于星箭連接環(huán)的理論模型和測(cè)量應(yīng)變與界面力的對(duì)應(yīng)關(guān)系,提出一種通過(guò)實(shí)測(cè)星箭連接環(huán)應(yīng)變反演星箭界面力的方法;該方法中采用了薄壁圓筒模型近似星箭連接環(huán),連接環(huán)的模擬誤差降低了識(shí)別結(jié)果的精度。尹健等[6]基于B樣條擬合星箭界面動(dòng)載荷的分布函數(shù),建立了衛(wèi)星結(jié)構(gòu)加速度與界面分布動(dòng)載荷的傳遞關(guān)系,提出了一種星箭界面環(huán)形分布動(dòng)載荷的識(shí)別方法,然而該方法中未能考慮模型誤差的影響;Wu等[7]考慮了星箭界面力學(xué)參數(shù)的不確定性,提出一種隨機(jī)動(dòng)力學(xué)系統(tǒng)上的隨機(jī)動(dòng)載荷識(shí)別方法,利用衛(wèi)星結(jié)構(gòu)振動(dòng)響應(yīng)樣本識(shí)別了衛(wèi)星結(jié)構(gòu)底部隨機(jī)振動(dòng)激勵(lì)。
利用結(jié)構(gòu)有限元模型開(kāi)展動(dòng)載荷反演[8-9],有限元模型誤差和動(dòng)載荷識(shí)別算法誤差將會(huì)疊加,目前只能是利用模型修正技術(shù)盡量提高有限元模型的模擬精度[10],以獲得更加準(zhǔn)確的載荷-響應(yīng)傳遞關(guān)系。當(dāng)星箭結(jié)構(gòu)模型存在局部非線性時(shí),載荷-響應(yīng)傳遞關(guān)系更加復(fù)雜,有限元模型模擬精度將進(jìn)一步下降,造成載荷識(shí)別結(jié)果的較大誤差。近年來(lái),智能識(shí)別算法在載荷識(shí)別領(lǐng)域越來(lái)越得到重視[11-13],有望降低模型和識(shí)別算法雙重誤差對(duì)載荷識(shí)別結(jié)果的影響。
實(shí)際服役過(guò)程中,星箭界面采用對(duì)接環(huán)連接,無(wú)法通過(guò)直接安裝傳感器測(cè)量界面動(dòng)載荷,但是衛(wèi)星結(jié)構(gòu)加速度以及星箭界面處的加速度均可以測(cè)量。基于BP神經(jīng)網(wǎng)絡(luò)方法的動(dòng)載荷識(shí)別技術(shù)一般直接將動(dòng)載荷-結(jié)構(gòu)響應(yīng)樣本作為神經(jīng)網(wǎng)絡(luò)訓(xùn)練的輸入-輸出,在星箭界面動(dòng)載荷識(shí)別問(wèn)題中難以實(shí)現(xiàn)。本文針對(duì)星箭界面動(dòng)載荷識(shí)別提出了一個(gè)新的思路,即先使用實(shí)測(cè)星箭界面加速度激勵(lì)和衛(wèi)星結(jié)構(gòu)加速度響應(yīng)構(gòu)建的樣本庫(kù)來(lái)構(gòu)建兩者之間傳遞關(guān)系的神經(jīng)網(wǎng)絡(luò)代理模型,進(jìn)而利用實(shí)測(cè)衛(wèi)星結(jié)構(gòu)加速度響應(yīng)識(shí)別星箭界面加速度激勵(lì),最后將識(shí)別得到的星箭界面加速度激勵(lì)施加于高保真的衛(wèi)星結(jié)構(gòu)有限元模型,分析得到星箭界面動(dòng)載荷。所提出的新方法能夠利用實(shí)測(cè)數(shù)據(jù)訓(xùn)練得到更可靠的逆向代理模型,實(shí)現(xiàn)星箭界面動(dòng)載荷的估計(jì)。本文研究有望實(shí)現(xiàn)服役狀態(tài)下星箭界面動(dòng)載荷的在線預(yù)測(cè)。
1 基于BP神經(jīng)網(wǎng)絡(luò)的星箭界面動(dòng)載荷識(shí)別
1.1 衛(wèi)星結(jié)構(gòu)激勵(lì)與載荷的傳遞關(guān)系
衛(wèi)星結(jié)構(gòu)加速度與星箭界面力存在如下關(guān)系

(1)


(2)
令G=gM,則G={Gij}表示聯(lián)系基礎(chǔ)加速度激勵(lì)與結(jié)構(gòu)加速度響應(yīng)的傳遞關(guān)系矩陣,其元素Gij表示在第j個(gè)位置作用單位脈沖加速度激勵(lì)時(shí)在第i個(gè)位置的衛(wèi)星結(jié)構(gòu)加速度響應(yīng)。利用式(1)或(2)的直接求逆可以識(shí)別界面力或基礎(chǔ)加速度激勵(lì),但識(shí)別結(jié)果會(huì)受到結(jié)構(gòu)模型和病態(tài)矩陣求逆雙重誤差疊加的影響,當(dāng)結(jié)構(gòu)模型不準(zhǔn)確時(shí),甚至?xí)?dǎo)致完全無(wú)法識(shí)別外載荷。
1.2 基于BP神經(jīng)網(wǎng)絡(luò)的載荷識(shí)別
動(dòng)載荷反演的本質(zhì)是構(gòu)建響應(yīng)與載荷的逆向傳遞關(guān)系,利用BP神經(jīng)網(wǎng)絡(luò)能夠?qū)W習(xí)和表征輸入-輸出之間的非線性映射關(guān)系,且無(wú)需預(yù)知描述這種映射關(guān)系的數(shù)學(xué)方程。它采用梯度下降法的學(xué)習(xí)規(guī)則,通過(guò)反向傳播修正來(lái)不斷調(diào)整權(quán)值和閾值,最終使網(wǎng)絡(luò)的誤差平方和最小。因此,利用BP神經(jīng)網(wǎng)絡(luò)模擬G矩陣中的映射關(guān)系,將基于BP神經(jīng)網(wǎng)絡(luò)的動(dòng)載荷識(shí)別方法應(yīng)用于衛(wèi)星基礎(chǔ)加速度激勵(lì)和星箭界面力識(shí)別,能夠有效避免由于衛(wèi)星結(jié)構(gòu)模型和病態(tài)矩陣求逆雙重誤差疊加,提高識(shí)別的精度。
本文構(gòu)建用于識(shí)別衛(wèi)星結(jié)構(gòu)基礎(chǔ)加速度激勵(lì)的BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。

圖1 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.1 Structural diagram of BP neural network


(3)
其次,根據(jù)隱含層激活函數(shù)σ1(x)計(jì)算隱層單元的輸出。隱含層第i個(gè)節(jié)點(diǎn)的輸出yi根據(jù)下式計(jì)算
(4)

(5)
最后,根據(jù)輸出層激活函數(shù)σ2(x)進(jìn)而得到輸出層單元的輸出。輸出層第k個(gè)節(jié)點(diǎn)的輸出ak計(jì)算如下
(6)
根據(jù)上述過(guò)程可以得到神經(jīng)網(wǎng)絡(luò)的輸出,再根據(jù)輸出的結(jié)果進(jìn)行BP神經(jīng)網(wǎng)絡(luò)的誤差反向傳播。此過(guò)程將實(shí)際輸出與訓(xùn)練指定輸出之間的誤差反向傳播給網(wǎng)絡(luò)上層,來(lái)調(diào)節(jié)各階層權(quán)值,最終完成網(wǎng)絡(luò)訓(xùn)練。從輸出層開(kāi)始,求取各個(gè)神經(jīng)元的輸出誤差,進(jìn)而采用誤差梯度下降法調(diào)節(jié)各層網(wǎng)絡(luò)的權(quán)值和閾值,使得最終調(diào)節(jié)后的網(wǎng)絡(luò)輸出能夠很好地接近預(yù)定輸出值。

(7)
各層權(quán)值δwk及誤差δbk分別為
(8)
(9)
式中,參數(shù)η為調(diào)節(jié)因子,代表學(xué)習(xí)速率。
依據(jù)上述方法可完成對(duì)BP神經(jīng)網(wǎng)絡(luò)各層權(quán)值和誤差的調(diào)整,每次調(diào)整都可以使總誤差函數(shù)值下降。通過(guò)將調(diào)整后網(wǎng)絡(luò)的總誤差值與預(yù)設(shè)的精度進(jìn)行比較,最終達(dá)到精度或者達(dá)到最大訓(xùn)練次數(shù)則停止訓(xùn)練,否則循環(huán)迭代不斷調(diào)整網(wǎng)絡(luò)參數(shù),此調(diào)整過(guò)程稱為神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)過(guò)程,通過(guò)學(xué)習(xí)過(guò)程最終得到滿意的權(quán)值、誤差和網(wǎng)絡(luò)結(jié)構(gòu)。BP神經(jīng)網(wǎng)絡(luò)構(gòu)建流程如圖2所示。
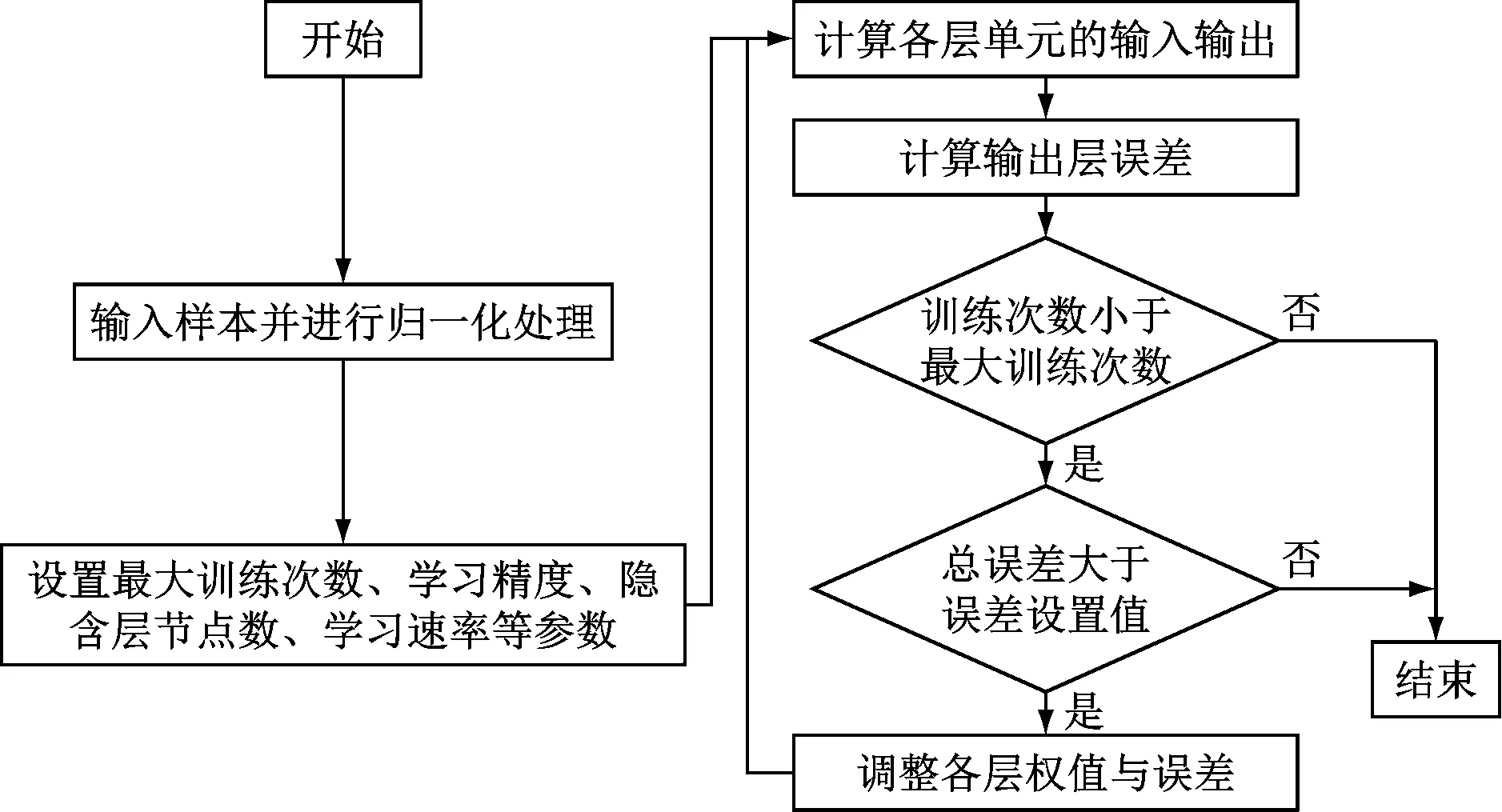
圖2 BP神經(jīng)網(wǎng)絡(luò)構(gòu)建流程圖Fig.2 Flow chart of BP neural network construction
基于BP神經(jīng)網(wǎng)絡(luò)的星箭界面動(dòng)載荷反演步驟如下:
(1) 建立訓(xùn)練樣本并進(jìn)行歸一化處理。仿真算例中,基于衛(wèi)星結(jié)構(gòu)有限元模型開(kāi)展仿真分析獲取樣本;試驗(yàn)驗(yàn)證中,直接采用實(shí)測(cè)響應(yīng)作為輸入-輸出樣本。基于衛(wèi)星結(jié)構(gòu),取基礎(chǔ)加速度激勵(lì)與結(jié)構(gòu)加速度響應(yīng)信號(hào)形成訓(xùn)練樣本集合,其中70%數(shù)據(jù)作為訓(xùn)練集,15%數(shù)據(jù)作為驗(yàn)證集,15%數(shù)據(jù)作為測(cè)試集。訓(xùn)練集主要是對(duì)數(shù)據(jù)樣本進(jìn)行模擬擬合,驗(yàn)證集負(fù)責(zé)尋找最優(yōu)的網(wǎng)絡(luò)深度,測(cè)試集負(fù)責(zé)測(cè)試最終模型的泛化能力,即預(yù)測(cè)的準(zhǔn)確性。
(2) 明確最大訓(xùn)練次數(shù)、學(xué)習(xí)精度、學(xué)習(xí)速率以及各層節(jié)點(diǎn)數(shù)等參數(shù)。本文所建立的BP神經(jīng)網(wǎng)絡(luò),最大訓(xùn)練次數(shù)為10 000次,學(xué)習(xí)精度為1×10-7,學(xué)習(xí)速率為0.01,輸入層節(jié)點(diǎn)數(shù)為n,分別為當(dāng)前時(shí)刻以及前n個(gè)時(shí)刻的響應(yīng)信號(hào)。輸出層節(jié)點(diǎn)數(shù)為1,即當(dāng)前時(shí)刻的基礎(chǔ)加速度激勵(lì)。相應(yīng)的隱含層單元節(jié)點(diǎn)數(shù)依據(jù)經(jīng)驗(yàn)公式取為log2n[14]。
(3) 開(kāi)展動(dòng)載荷識(shí)別。結(jié)合實(shí)測(cè)衛(wèi)星結(jié)構(gòu)加速度響應(yīng)數(shù)據(jù)和訓(xùn)練得到的BP神經(jīng)網(wǎng)絡(luò),識(shí)別得到衛(wèi)星結(jié)構(gòu)上的基礎(chǔ)加速度激勵(lì),并將基礎(chǔ)加速度激勵(lì)作用于高保真衛(wèi)星結(jié)構(gòu)動(dòng)力學(xué)模型,獲取星箭界面動(dòng)載荷。
2 仿真算例
2.1 衛(wèi)星結(jié)構(gòu)有限元模型
如圖1(a)所示衛(wèi)星結(jié)構(gòu)由法蘭盤(pán)、主承力筒、側(cè)板、隔板、L型壓條及M3螺釘連接件組成。構(gòu)件材料和尺寸如表1所示。衛(wèi)星結(jié)構(gòu)上各部件采用六面體實(shí)體單元建模。采用等效線性化的薄層單元來(lái)模擬各部件之間的螺栓連接和接觸。衛(wèi)星結(jié)構(gòu)有限元模型如圖3(b)所示。
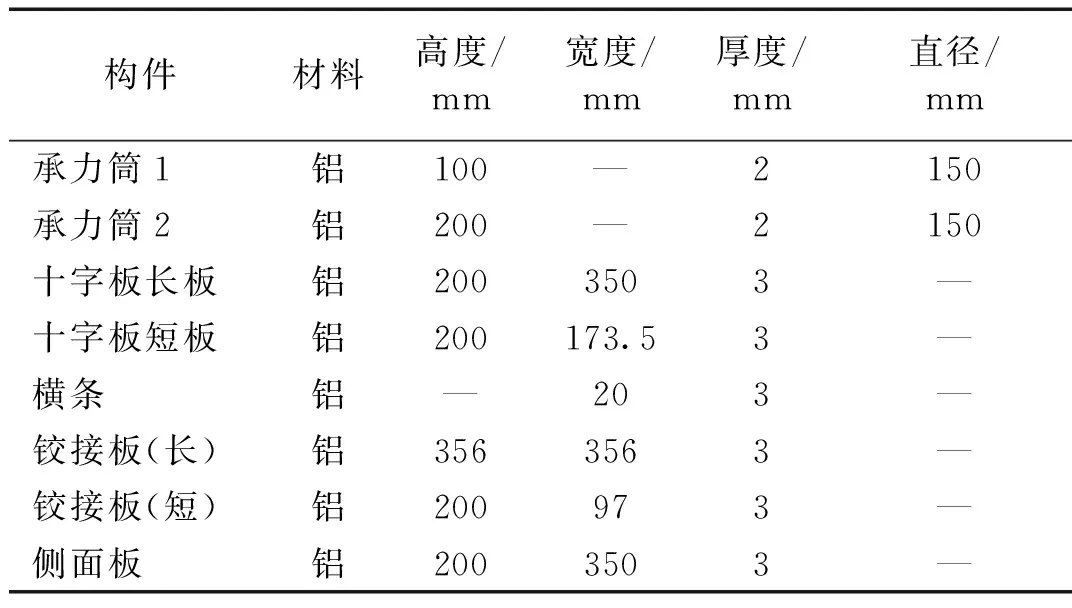
表1 衛(wèi)星結(jié)構(gòu)主要構(gòu)件尺寸Tab.1 Dimensions of the main components in the satellite structure
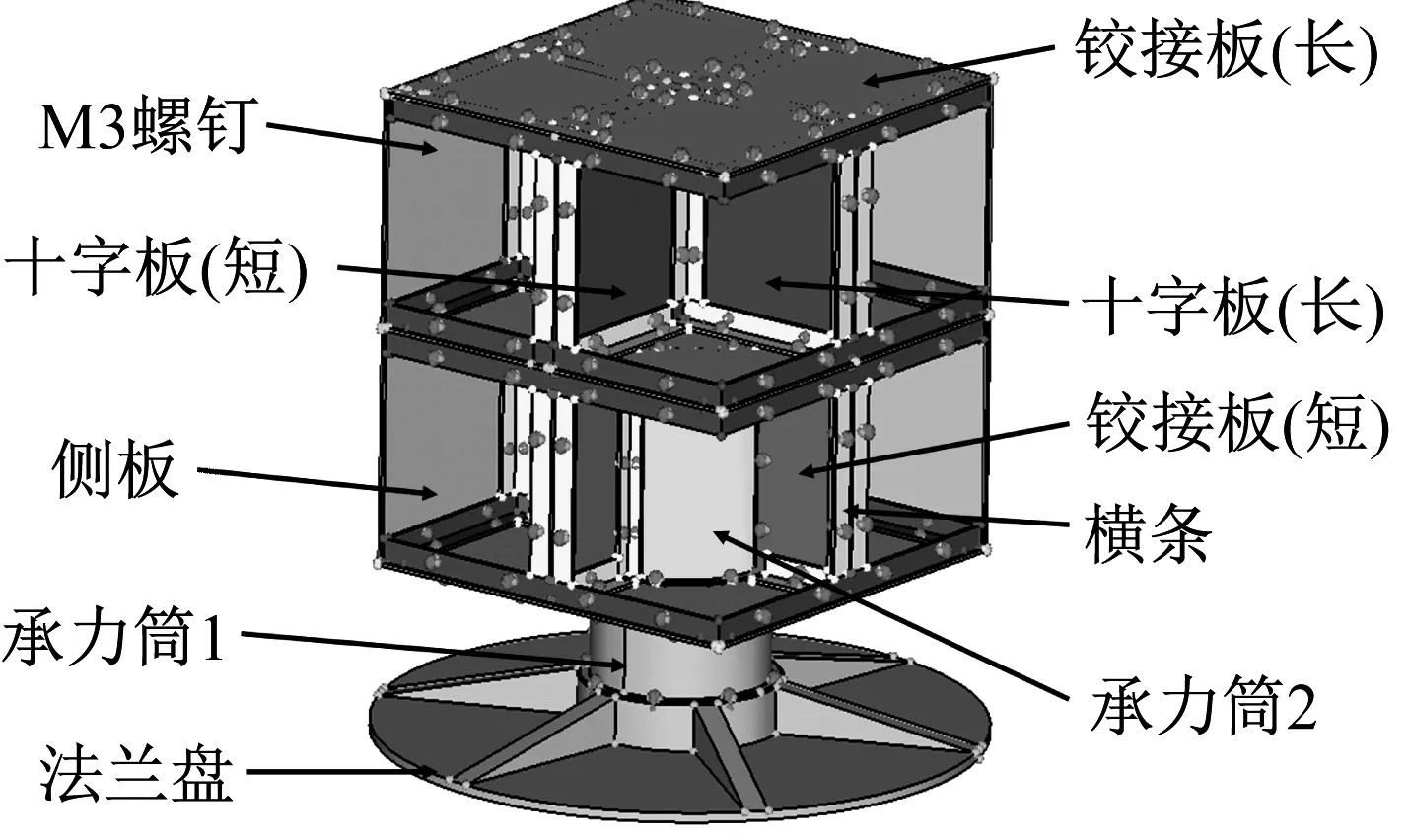
(a) 幾何模型
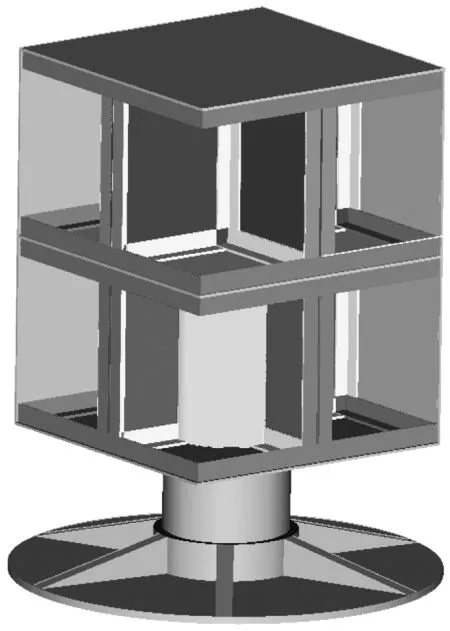
(b) 有限元模型圖3 衛(wèi)星結(jié)構(gòu)及有限元模型Fig.3 Satellite structure and finite element model
實(shí)際服役狀態(tài)下的星箭界面動(dòng)態(tài)載荷是難以直接測(cè)量的。本研究設(shè)計(jì)了如圖4(a)所示的力測(cè)量工裝,用于實(shí)驗(yàn)室條件下測(cè)量振動(dòng)試驗(yàn)中振動(dòng)臺(tái)與衛(wèi)星結(jié)構(gòu)之間傳遞載荷,以驗(yàn)證本文方法識(shí)別得到的星箭界面動(dòng)載荷的有效性。力測(cè)量工裝中包含衛(wèi)星結(jié)構(gòu)與振動(dòng)臺(tái)的連接裝置以及用于測(cè)量傳遞載荷的力傳感器;利用六個(gè)力傳感器連接上方法蘭盤(pán)和下方底座,底座通過(guò)M16螺栓與振動(dòng)臺(tái)臺(tái)面連接。力測(cè)量工裝各部件的材料和尺寸如表2中所示。建立如圖4(b)所示力測(cè)量工裝有限元模型,其中結(jié)構(gòu)件和力傳感器采用實(shí)體單元模擬,各螺栓連接和接觸部位采用薄層單元模擬。圖5中給出了帶力測(cè)量工裝的衛(wèi)星結(jié)構(gòu)有限元模型。
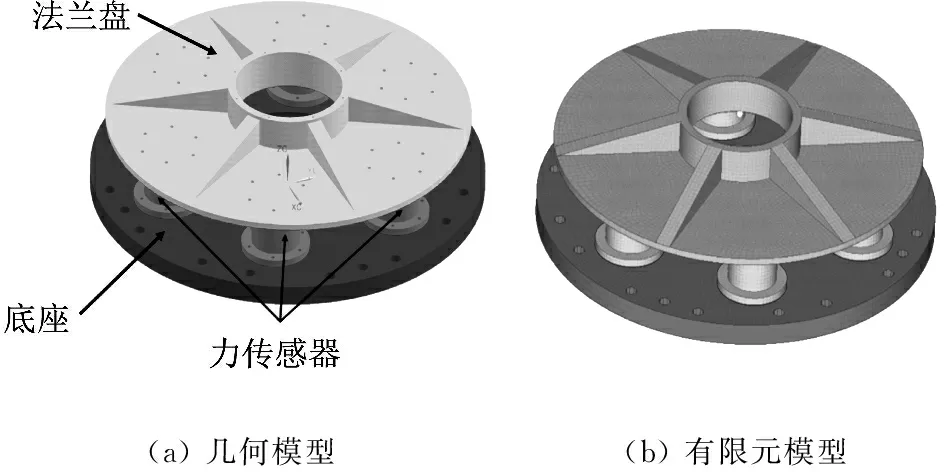
圖4 力測(cè)量工裝及其有限元模型Fig.4 Force measuring tooling and its finite element model
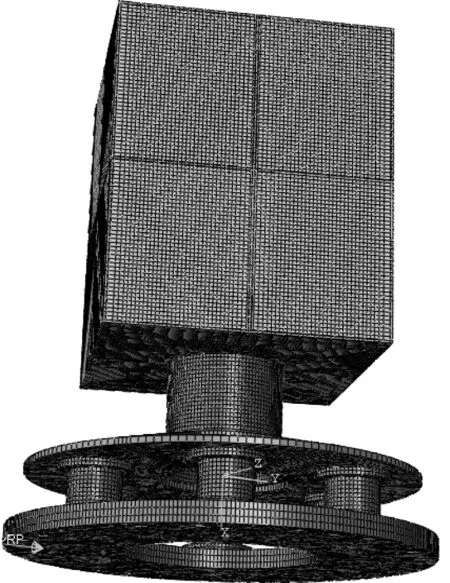
圖5 帶力測(cè)量工裝的衛(wèi)星結(jié)構(gòu)有限元模型Fig.5 Finite element model of the satellite structure with force measuring tooling

表2 力測(cè)量工裝材料及尺寸Tab.2 Material and dimensions of the force measuring tooling
2.2 正弦激勵(lì)工況
選取正弦基礎(chǔ)加速度激勵(lì)的頻率為70 Hz,介于帶力測(cè)量工裝的衛(wèi)星結(jié)構(gòu)模型的第1階和第2階固有頻率之間,振動(dòng)幅值為0.5 m/s2,采樣頻率設(shè)定為512 Hz。基礎(chǔ)加速度激勵(lì)通過(guò)大質(zhì)量法施加在力測(cè)量工裝結(jié)構(gòu)有限元模型底部,如圖5所示。
通過(guò)有限元分析得到測(cè)點(diǎn)處結(jié)構(gòu)的仿真加速度響應(yīng)。測(cè)點(diǎn)位置與試驗(yàn)?zāi)P蜏y(cè)點(diǎn)1的位置相同,測(cè)點(diǎn)響應(yīng)樣本總數(shù)設(shè)定為3 072,其中70%數(shù)據(jù)作為訓(xùn)練集訓(xùn)練網(wǎng)絡(luò),15%數(shù)據(jù)作為驗(yàn)證集,15%數(shù)據(jù)作為測(cè)試集。利用訓(xùn)練獲得的BP神經(jīng)網(wǎng)絡(luò),以t,t+1,…,t+19時(shí)刻的加速度響應(yīng)為輸入,即可識(shí)別t時(shí)刻的基礎(chǔ)加速度激勵(lì)。基礎(chǔ)加速度激勵(lì)識(shí)別值與參考值的對(duì)比如圖6所示。由圖可知,本文的方法能夠由衛(wèi)星結(jié)構(gòu)加速度響應(yīng)精確識(shí)別衛(wèi)星底部基礎(chǔ)加速度激勵(lì),激勵(lì)識(shí)別值和參考值之間的均方根誤差趨向于0,其中均方根誤差(root mean square error,RMSE)的計(jì)算由下式定義
(a) 整體對(duì)比
(10)

為了研究該識(shí)別算法的抗噪聲干擾能力,將仿真計(jì)算得到的衛(wèi)星結(jié)構(gòu)加速度響應(yīng)信號(hào)分別添加2%、10%、20%的噪聲,使用激勵(lì)-帶噪聲響應(yīng)樣本集訓(xùn)練得到的神經(jīng)網(wǎng)絡(luò)開(kāi)展基礎(chǔ)加速度激勵(lì)識(shí)別。信號(hào)添加噪聲如下式所示
Yerr=Ycal+lnoise·std(Ycal)·rand(-1,1)
(11)
式中,Ycal和Yerr分別表示加噪聲前后的響應(yīng)樣本;lnoise表示噪聲水平;std(·)表示標(biāo)準(zhǔn)差;rand(·)表示隨機(jī)擾動(dòng)。
圖7中給出了添加20%噪聲工況下本文方法的識(shí)別結(jié)果。表3中給出了不同噪聲水平下基礎(chǔ)加速度激勵(lì)的識(shí)別誤差。結(jié)果表明,本文方法在加速度響應(yīng)受不同程度噪聲干擾的情況下均能夠準(zhǔn)確識(shí)別基礎(chǔ)加速度激勵(lì),識(shí)別誤差隨著噪聲干擾的增大略有增加,方法具有更好的抗噪聲能力。
(a) 整體對(duì)比
(b) 局部放大圖7 正弦基礎(chǔ)加速度激勵(lì)識(shí)別結(jié)果(20%噪聲)Fig.7 Identification results of sinusoidal basic acceleration excitation (20% noise)

表3 不同噪聲水平工況正弦基礎(chǔ)加速度激勵(lì)識(shí)別誤差Tab.3 Identification errorsin sinusoidal basic acceleration excitation under different noise level
2.3 隨機(jī)振動(dòng)工況
實(shí)際衛(wèi)星結(jié)構(gòu)常承受隨機(jī)振動(dòng)激勵(lì),利用正弦激勵(lì)-結(jié)構(gòu)響應(yīng)樣本庫(kù)訓(xùn)練得到的神經(jīng)網(wǎng)絡(luò)模型難以用于隨機(jī)振動(dòng)激勵(lì)識(shí)別。因此本節(jié)開(kāi)展基于隨機(jī)激勵(lì)-結(jié)構(gòu)響應(yīng)樣本庫(kù)的神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練和基于衛(wèi)星結(jié)構(gòu)加速度響應(yīng)的隨機(jī)基礎(chǔ)加速度激勵(lì)識(shí)別。
參考隨機(jī)基礎(chǔ)加速度激勵(lì)的功率譜密度函數(shù)如圖8所示,激勵(lì)頻段為1~100 Hz。利用諧波疊加法得到隨機(jī)基礎(chǔ)加速度激勵(lì)的樣本,與2.2節(jié)中類(lèi)似,開(kāi)展帶力測(cè)量工裝衛(wèi)星結(jié)構(gòu)的振動(dòng)分析,建立隨機(jī)激勵(lì)-結(jié)構(gòu)響應(yīng)樣本庫(kù)。
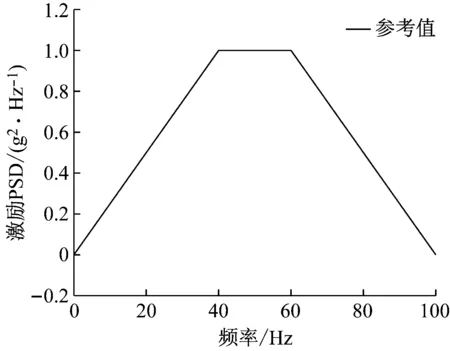
圖8 隨機(jī)基礎(chǔ)加速度激勵(lì)功率譜密度圖Fig.8 Power spectral density of the random base acceleration excitation
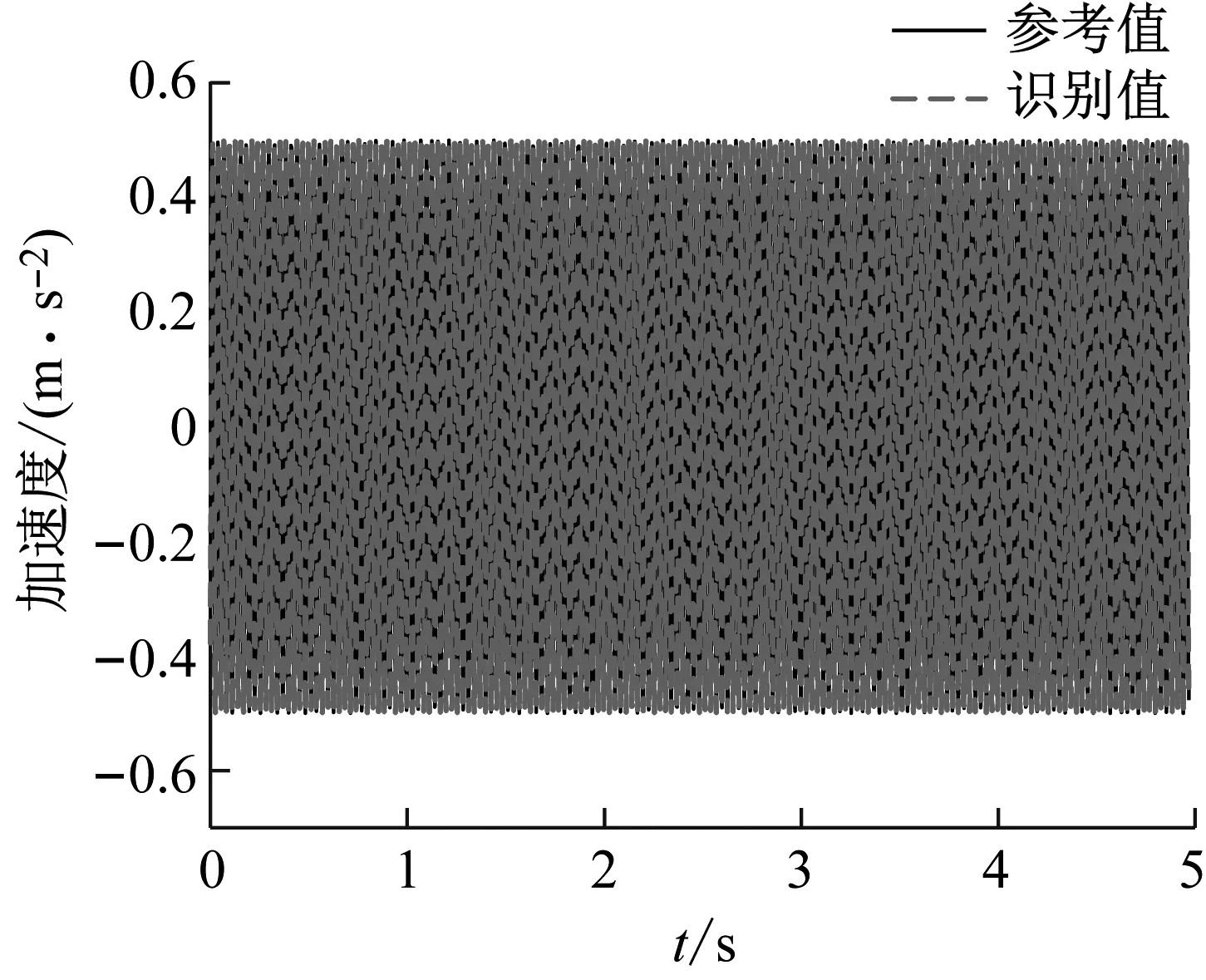
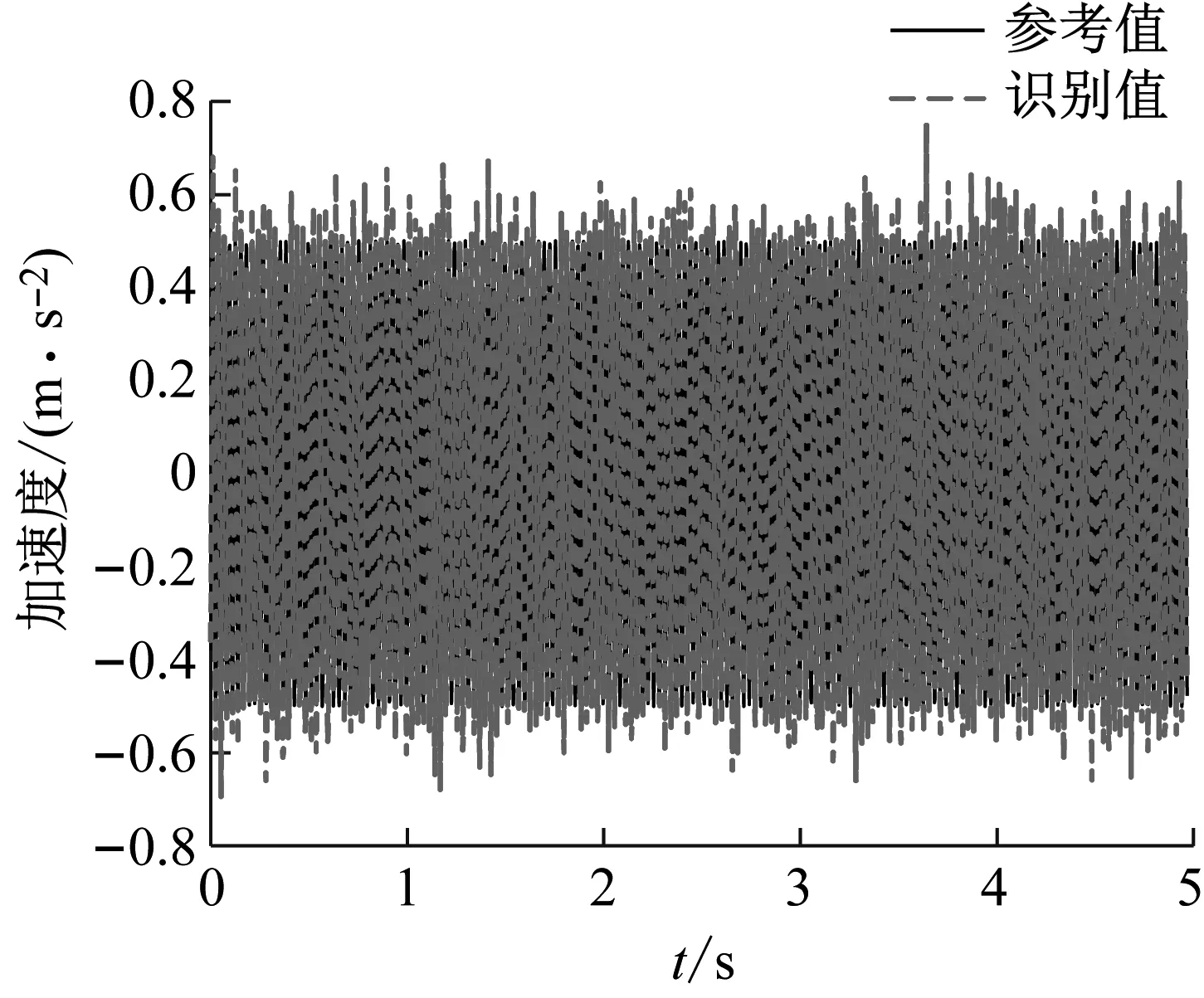
圖9中給出了利用仿真衛(wèi)星結(jié)構(gòu)加速度響應(yīng)和訓(xùn)練后得到的神經(jīng)網(wǎng)絡(luò)模型識(shí)別的衛(wèi)星底部隨機(jī)基礎(chǔ)加速度激勵(lì)與參考值對(duì)比。結(jié)果表明了該識(shí)別模型對(duì)隨機(jī)基礎(chǔ)加速度激勵(lì)識(shí)別的有效性。進(jìn)一步,為驗(yàn)證基于隨機(jī)激勵(lì)-結(jié)構(gòu)響應(yīng)樣本庫(kù)訓(xùn)練的神經(jīng)網(wǎng)絡(luò)識(shí)別模型的普適性,將該識(shí)別模型用于2.2節(jié)中正弦激勵(lì)的識(shí)別,識(shí)別結(jié)果如圖10所示。結(jié)果表明該模型也能夠較準(zhǔn)確地識(shí)別正弦激勵(lì),識(shí)別結(jié)果的均方根誤差8.489 5;反之,利用正弦激勵(lì)-響應(yīng)構(gòu)建的神經(jīng)網(wǎng)絡(luò)識(shí)別模型則無(wú)法適用于隨機(jī)基礎(chǔ)加速度激勵(lì)的識(shí)別。
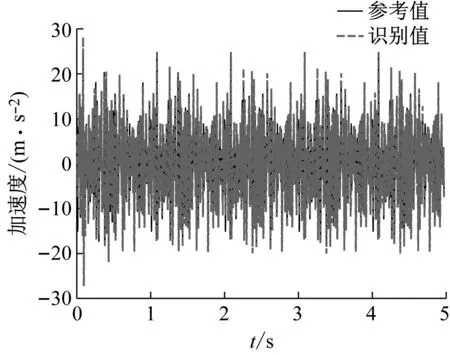
(a) 整體對(duì)比
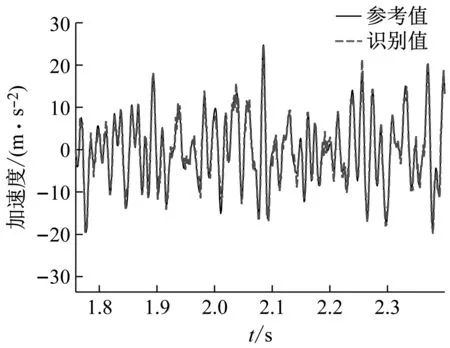
(b) 局部放大圖9 隨機(jī)基礎(chǔ)加速度激勵(lì)識(shí)別結(jié)果Fig.9 Identification results of random base acceleration excitation
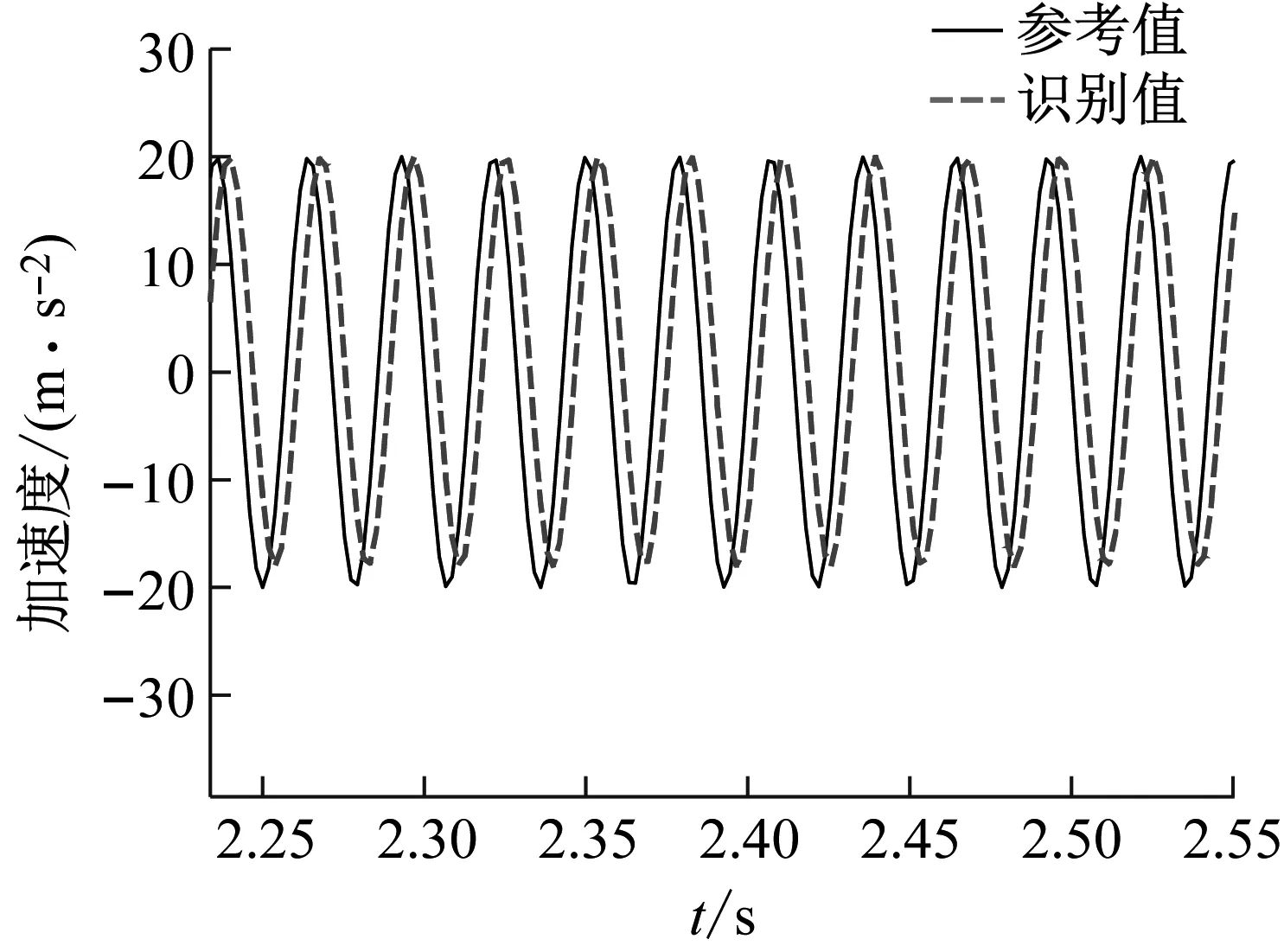
圖10 利用隨機(jī)激勵(lì)-響應(yīng)神經(jīng)網(wǎng)絡(luò)模型識(shí)別正弦激勵(lì)Fig.10 Identified sinusoidal excitation by using the random excitation-response neural network model
3 基礎(chǔ)加速度激勵(lì)和界面動(dòng)載荷識(shí)別試驗(yàn)驗(yàn)證
3.1 振動(dòng)試驗(yàn)系統(tǒng)
為驗(yàn)證本文提出的載荷識(shí)別方法。搭建如圖11所示試驗(yàn)系統(tǒng)。衛(wèi)星結(jié)構(gòu)模型底端串聯(lián)力測(cè)量工裝,固定在振動(dòng)臺(tái)臺(tái)面上。在衛(wèi)星結(jié)構(gòu)上施加橫向基礎(chǔ)加速度激勵(lì),開(kāi)展結(jié)構(gòu)振動(dòng)試驗(yàn),利用振動(dòng)臺(tái)面加速度數(shù)據(jù)和衛(wèi)星結(jié)構(gòu)頂部測(cè)點(diǎn)加速度響應(yīng)訓(xùn)練載荷反演的神經(jīng)網(wǎng)絡(luò)模型,開(kāi)展基于實(shí)測(cè)結(jié)構(gòu)加速度信號(hào)的基礎(chǔ)加速度激勵(lì)識(shí)別并利用實(shí)測(cè)振動(dòng)臺(tái)面加速度驗(yàn)證;同時(shí),將識(shí)別獲得的基礎(chǔ)加速度激勵(lì)作用于結(jié)構(gòu)有限元模型,計(jì)算振動(dòng)臺(tái)與衛(wèi)星結(jié)構(gòu)連接界面間的傳遞載荷,利用力傳感器測(cè)量得到的振動(dòng)臺(tái)與衛(wèi)星結(jié)構(gòu)間傳遞載荷驗(yàn)證識(shí)別的界面動(dòng)載荷。

圖11 衛(wèi)星結(jié)構(gòu)基礎(chǔ)加速度激勵(lì)試驗(yàn)圖Fig.11 Baseacceleration excitation test of the satellite structure
值得注意的是,實(shí)際星箭連接界面上的動(dòng)載荷應(yīng)該連續(xù)分布的。但由于分布動(dòng)載荷的測(cè)量存在較大困難,本研究在試驗(yàn)驗(yàn)證中,采用了六個(gè)三向力傳感器測(cè)量得到的集中載荷等效星箭界面上的連續(xù)分布動(dòng)載荷,并利用動(dòng)載荷識(shí)別值與實(shí)測(cè)值對(duì)比來(lái)驗(yàn)證識(shí)別方法的有效性。試驗(yàn)中共有6個(gè)加速度信號(hào)采集通道以及18個(gè)力信號(hào)采集通道。振動(dòng)臺(tái)在水平方向激振,載荷工況有兩種:分別是頻率為70 Hz,大小為0.5g的正弦激勵(lì)以及頻率范圍為5~100 Hz,大小為0.2g的正弦掃頻激勵(lì)。
3.2 識(shí)別結(jié)果
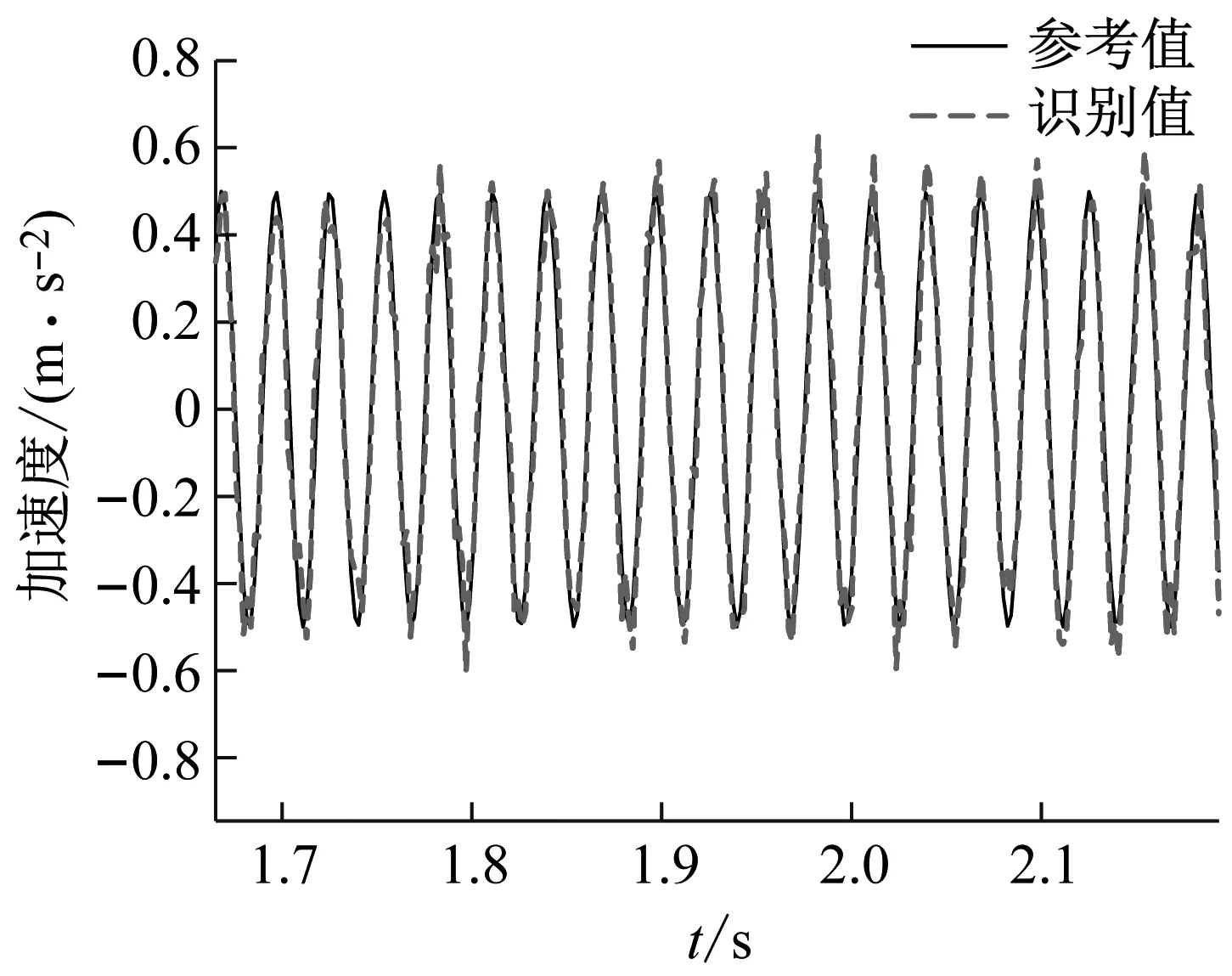
利用圖11中測(cè)點(diǎn)1采集得到的衛(wèi)星結(jié)構(gòu)加速度響應(yīng)信號(hào)以及振動(dòng)臺(tái)面實(shí)測(cè)加速度激勵(lì)構(gòu)成的樣本,訓(xùn)練用于載荷識(shí)別的神經(jīng)網(wǎng)絡(luò);進(jìn)一步利用實(shí)測(cè)衛(wèi)星結(jié)構(gòu)加速度反演基礎(chǔ)加速度激勵(lì)。正弦激勵(lì)以及正弦掃頻工況下振動(dòng)臺(tái)面的加速度激勵(lì)識(shí)別結(jié)果分別如圖12和13所示。結(jié)果表明:基于本文方法構(gòu)建的神經(jīng)網(wǎng)絡(luò)識(shí)別模型能夠準(zhǔn)確的識(shí)別振動(dòng)臺(tái)面在正弦和掃頻工況下的加速度激勵(lì),識(shí)別結(jié)果的均方根誤差分別為0.001 7和0.005 9。利用實(shí)測(cè)衛(wèi)星加速度響應(yīng)和振動(dòng)臺(tái)面加速度激勵(lì)信號(hào)訓(xùn)練神經(jīng)網(wǎng)絡(luò)識(shí)別模型,能夠免去衛(wèi)星結(jié)構(gòu)有限元建模和模型修正環(huán)節(jié),同時(shí)能夠一定程度上避免結(jié)構(gòu)有限元模型誤差對(duì)基礎(chǔ)加速度激勵(lì)識(shí)別結(jié)果精度的影響。
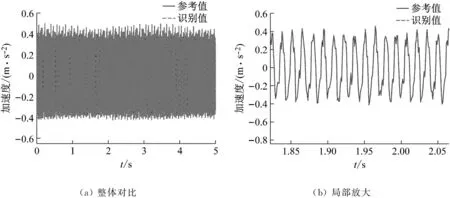
圖12 正弦激勵(lì)下振動(dòng)臺(tái)面加速度激勵(lì)識(shí)別結(jié)果Fig.12 Identification results of acceleration excitation on shaking table surface under sinusoidal excitation
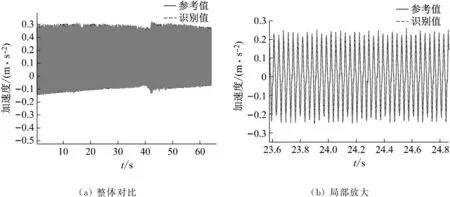
圖13 正弦掃頻激勵(lì)下振動(dòng)臺(tái)面加速度激勵(lì)識(shí)別結(jié)果Fig.13 Identification results of acceleration excitation on shaking table surface under swept-sin excitation
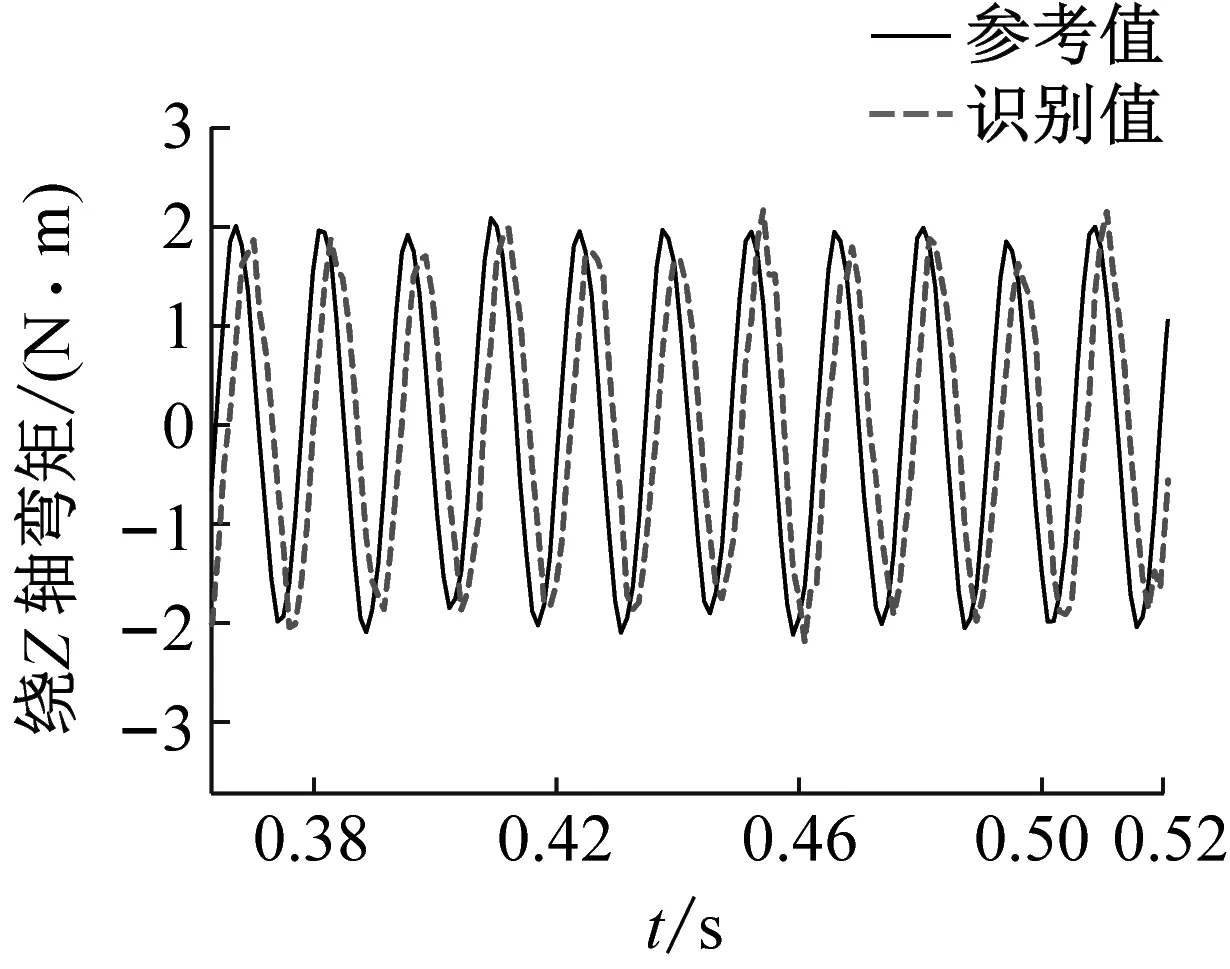
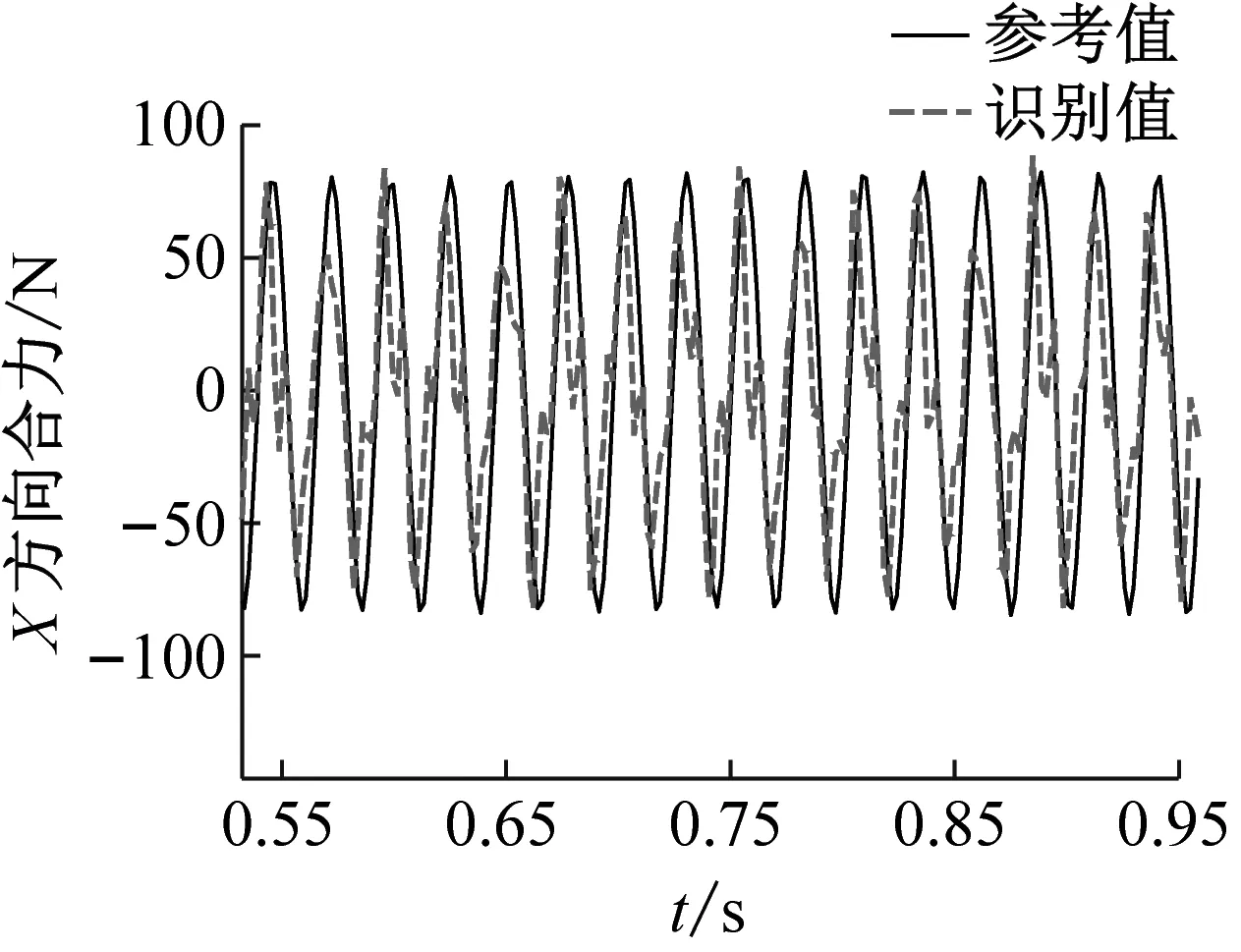
將基于神經(jīng)網(wǎng)絡(luò)方法識(shí)別得到的振動(dòng)臺(tái)面加速度激勵(lì)施加于帶力測(cè)量工裝的衛(wèi)星結(jié)構(gòu)有限元模型,可以計(jì)算得到力測(cè)量工裝處的傳遞動(dòng)載荷;利用得到的六個(gè)力傳感器位置處載荷時(shí)程進(jìn)一步計(jì)算振動(dòng)臺(tái)與衛(wèi)星結(jié)構(gòu)之間傳遞的六自由度動(dòng)載荷,驗(yàn)證界面?zhèn)鬟f六自由度載荷識(shí)別結(jié)果的精度。由于振動(dòng)臺(tái)加速度激勵(lì)為沿x方向的水平激勵(lì),六自由度載荷中,沿x方向的水平合力與繞y軸方向的彎矩為主要的載荷成份。圖14和圖15中分別給出了正弦激勵(lì)和正弦掃頻激勵(lì)下x,y方向合力以及繞y軸彎矩的識(shí)別值與試驗(yàn)參考值之間在某一個(gè)時(shí)段的對(duì)比結(jié)果。結(jié)果表明:識(shí)別得到的界面動(dòng)載荷均具有良好的精度,證明了本文提出的界面動(dòng)載荷識(shí)別方法的有效性。正弦激勵(lì)工況中三個(gè)動(dòng)載荷識(shí)別值與試驗(yàn)值峰值誤差分別為0.923 8,0.082 9,0.016 1;掃頻激勵(lì)工況中三個(gè)動(dòng)載荷識(shí)別值與試驗(yàn)值峰值誤差分別為0.705 9,0.326 3,0.129 4。圖中顯示載荷識(shí)別值與參考值之間存在一定的相位差,可能的原因是力傳感器測(cè)量信號(hào)存在大量噪聲,濾波后存在相位漂移,通過(guò)提高力信號(hào)測(cè)量精度有望實(shí)現(xiàn)更小的識(shí)別誤差。
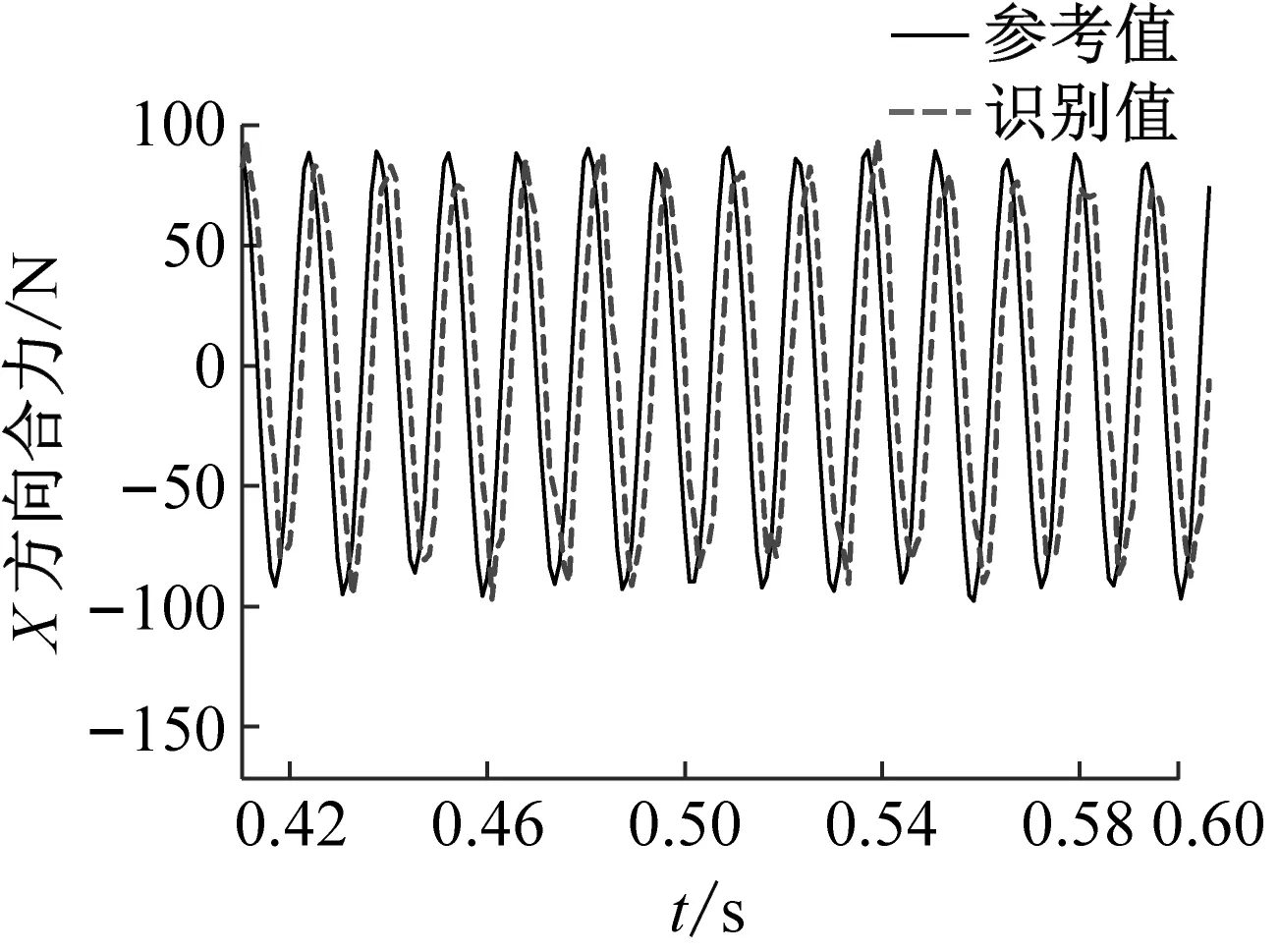
(a) x方向合力
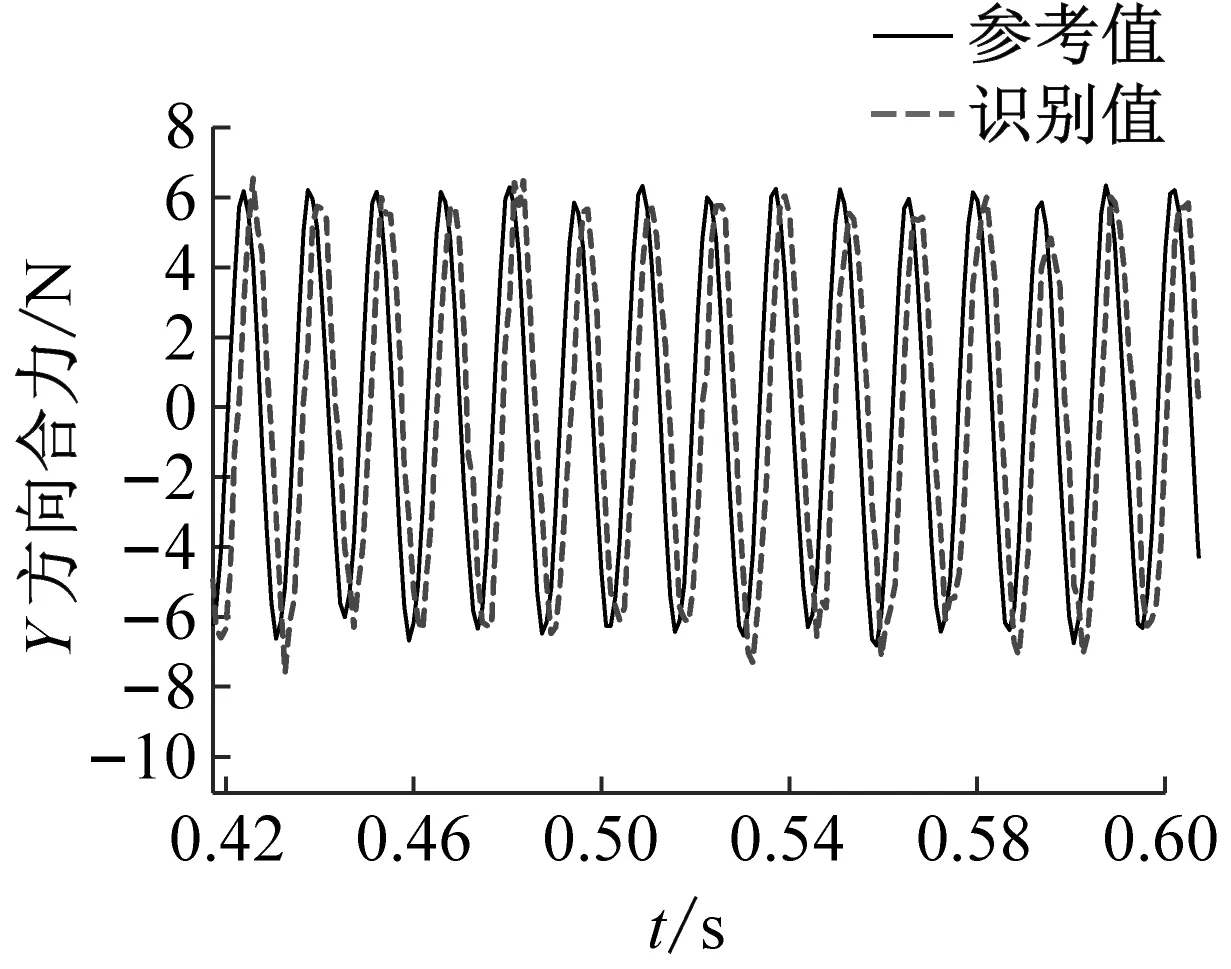
(b) y方向合力
(c) 繞z軸彎矩圖14 正弦激勵(lì)下部分六自由度動(dòng)載荷識(shí)別值與實(shí)測(cè)值對(duì)比Fig.14 Comparison of the identified and measured partial six degree-of-freedom dynamic load under sinusoidal excitation
(a) x方向合力

(b) y方向合力
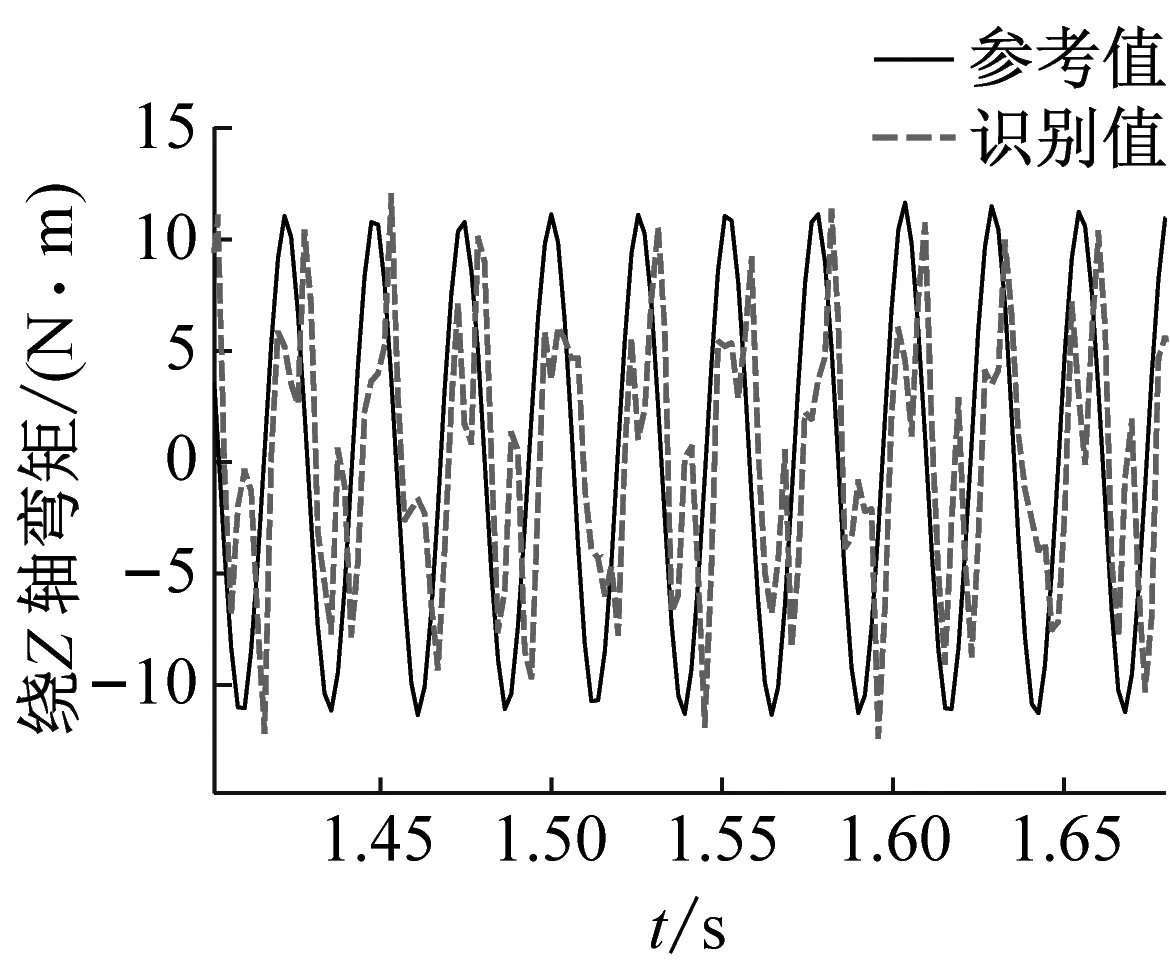
(c) 繞z軸彎矩圖15 正弦掃頻激勵(lì)下部分六自由度動(dòng)載荷識(shí)別值與實(shí)測(cè)值對(duì)比Fig.15 Comparison of the identified and measured partial six degree-of-freedom dynamic load under swept-sin excitation
4 結(jié) 論
本文基于衛(wèi)星結(jié)構(gòu)加速度響應(yīng)和星箭界面加速度激勵(lì)構(gòu)建了激勵(lì)-響應(yīng)樣本數(shù)據(jù)庫(kù),利用BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練界面處加速度激勵(lì)-衛(wèi)星結(jié)構(gòu)加速度響應(yīng)間的傳遞關(guān)系,從而建立了星箭界面處加速度激勵(lì)的識(shí)別模型,并進(jìn)一步將識(shí)別得到的加速度激勵(lì)施加于高保真衛(wèi)星結(jié)構(gòu)有限元模型,實(shí)現(xiàn)了基于BP神經(jīng)網(wǎng)絡(luò)模型的星箭界面動(dòng)載荷的識(shí)別。開(kāi)展了仿真和試驗(yàn)研究,驗(yàn)證了方法的有效性。主要結(jié)論如下:
(1) 利用激勵(lì)-響應(yīng)樣本庫(kù)建立的神經(jīng)網(wǎng)絡(luò)訓(xùn)練模型能夠準(zhǔn)確的反演衛(wèi)星結(jié)構(gòu)基礎(chǔ)加速度激勵(lì),該方法具有良好的噪聲魯棒性。利用反演得到的基礎(chǔ)加速度激勵(lì)和衛(wèi)星結(jié)構(gòu)有限元模型,能夠準(zhǔn)確預(yù)測(cè)星箭界面動(dòng)載荷。
(2) 用于動(dòng)載荷識(shí)別的神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練中,樣本庫(kù)構(gòu)建至關(guān)重要;基于寬頻隨機(jī)振動(dòng)工況下的激勵(lì)-響應(yīng)樣本庫(kù)構(gòu)建的神經(jīng)網(wǎng)絡(luò)模型的普適性更好,能夠高精度完成定頻正弦激勵(lì)的識(shí)別,反之則不能。
(3) 衛(wèi)星發(fā)射過(guò)程中,星箭對(duì)接面附近的加速度和衛(wèi)星結(jié)構(gòu)局部加速度響應(yīng)均可測(cè),本文的方法有望實(shí)現(xiàn)服役狀態(tài)下的星箭界面動(dòng)載荷預(yù)測(cè)。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
新聞傳播(2015年11期)2015-07-18 11:15:04
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
