改進的電壓檢測極值中值濾波算法設計
2023-03-21 02:21:52李志鵬王青燕
計算機時代 2023年3期
李志鵬,王青燕
(1.江西財經大學,江西 南昌 330013;2.江西經濟管理干部學院)
0 引言
電壓數據的檢測及過濾目前有多種方法,主要有離散傅氏變換算法[1],快速離散傅氏變換算法[2],一點采樣算法、兩點采樣算法,積分交流采樣算法等。電壓檢測會有誤差,設計算法的目的是盡可能地減少檢測上的誤差[3]。每種算法有各自的優缺點,如快速離散傅氏變換算法可獲得比較全面的測量數據,但此算法計算結果較多,對一個周期中相同間隔采樣點數有很大的要求,內存占用大[4],中間變量比較容易溢出,采用固定點運算實現困難;有學者針對數據過濾的問題,提出用中值濾波的方式,也有學者對中值濾波算法進行了改進函數過濾[5-7],目的是減小數據的方差[8],降低污染數據的比例[9],提高數據的可靠性。
極值中值濾波的規則:某點的電壓值與附近點的電壓值相差很大,這一點可歸屬為極值點,如果相差不大,則表現為正常電壓值,若極值點表示為min{}或者max{},正常點數表示為sta{},則檢測到的數據點an可以表示為:
此算法的好處在于可將變化速度快的數據分離出來,將正常數值的數據存放到設置好的預留區。但此算法存在不足之處,若外界的非線性設備使用的頻率高,對電路產生的沖擊電壓可能波及較大區域。采集器收集數據時,一個周期內可測量多個數值點,數據是否有效無法判斷。基于上述問題,對算法進行了改進。通過數據顯示,改進的極值中值濾波算法,刪除更多波動性大的數據,保留的數據方差波動性更小。
1 中值濾波算法的原理
濾波就是過濾不合理的波值,在電壓應用中,非線性用電設備的瞬間上電、斷電,對電壓的沖擊,都會造成電壓諧波瞬間變化幅度大,若此刻電表正好采集到,電壓采集的數據將造成巨大的誤差,因此,濾波算法是很有必要的。在濾波算法中,現在已經有很多成熟的算法。按照數學原理,標準電壓的函數是正弦或者正弦平移變換的曲線,但在實際中,電壓波形曲線并不會嚴格符合標準。對數據的采樣造成較大誤差。
基于采樣值的不穩定性,有人提出了中值濾波算法,中值濾波算法實際上應用數學原理,采樣的點數據存放到系統中預留的存儲區,以備調用,采集模塊負責采集數據,但無法辨別數據的有效性,中值濾波的原理是對這些采集的數據進行分組,再對每個組內的數據進行由小到大或由大到小的排列,排列好之后取中間的部分。
已{X1,X2,X3,X4,X5,…,Xn}這組數據為例,它的中值M公式為:
其中,{a1,a2,a3,a4,a5,…,an}數列為{X1,X2,X3,X4,X5,…,Xn}數列由小到大排列的順序列。采集器采集數據,加載到數列{X1,X2,X3,X4,X5,…,Xn}中,如采集到的電壓值為{501,203,305,210,232},則對它們由小到大的排列順序為{203,210,232,305,501},中值M=232,這一組數據的中值可作為這組數據的標準值,轉存到中值數據區。
2 改進的算法設計
⑴改進的算法的分析
對于極值中值濾波算法,其不足之處在于不能更好地辨別一段區域內的誤差數值,基于上述問題進行了改進。一般電網都是遵循六個基本標準值(KV),公用電網的電壓標準值如表1所示。

表1 公用電網諧波電壓表
公共網絡的電壓值都在上述圖中,在預先設計好的數組中保存這些電壓值:
{0.38,6,10,35,66,110}
通過A/D采樣模塊,將采集的數據,與之對應。這種算法的設計首先設置好UN(電壓標準值),設置參數自動檢測電網電壓中符合對應的電壓值,再由內部函數自動設置好相應的參數。可用線性規劃法設置對應的電壓值,以{0.38,6,10,35,66,110}為例,相鄰兩個電壓值組成坐標,由最后一個和第一個電壓值組成坐標,則對應坐標為:(0.38,6),(6,10),(10,35),(35,66),(66,110),(110,0.38),形成坐標后,連接相鄰兩點,形成線性規劃范圍圈,再取兩次電壓測定的數值,形成一個坐標,若坐標落在范圍圈內,則保留數據。再重新取采樣的兩個電壓值組成坐標,以此類推下去,直到采樣到落在范圍圈里的電壓值,兩次采取的電壓值通過采用均方差方法,積分得到電壓值,以便減少數據誤差。采用的公式為:
其中,N的數值為采樣次數,ui為每次測得具體數值。
本算法的關鍵是如何設置范圍圈,應用的理論是線性規劃法,兩點之間可以確定一條直線,例如A點坐標為A(x0,y0),B點坐標為B(x1,y1),則確定的直線方程公式如下:
⑵改進的算法的設計
第一步:確定六條直線,分別為A{(0.38,6),(6,10)},B{(6,10),(10,35)},C{(10,35),(35,66)},D{(35,66),(66,110)},E{(66,110),(110,0.38)},F{(110,0.38),(0.38,6)}
化簡后,再用線性規劃的理論,列公式如下:
其中,x表示自變量,y表示因變量。
如此,圍成一個范圍圈,即便非線性用電器的長期使用,致使電壓出現的采取數據不準也會排除在外,這些直線組成區域圖形如圖1所示。

圖1 線性規劃范圍圈
采取的電壓值可以用此辦法將數據確定在范圍內,如果是在范圍外,可以再取兩次數據,循環操作,直到取到的數據在范圍圈內為止。
第二步:數據確定在范圍圈內,另一個問題是數據具體是在六個電壓值中的哪一個,檢測到的數據值,可能在它們之間,而且任何檢測都不可能完全匹配,數據存在誤差范圍,誤差范圍是電壓值的百分之五左右,本算法,限定的百分比是百分之十,之所以限定在百分之十,是因為檢測的數據可能比標準的數值差一部分。公式為:
其中,UF為設置的最大范圍。若有個別數據不在范圍圈內,回到第一步,重新計算。
第三步:在計算好標準的數據后,先將相應的公共電壓值設置好,根據設置好的電壓計算電壓偏差,電壓偏差計算公式為:
其中,UC為檢測到具體數值,UN為公用電壓諧波電壓數值表中的電壓值其中之一。
第四步:電壓檢測時,可能有非線性用電設備在長時間工作,使得無法測得內部數據,于是在第一步的基礎上,電壓偏差還需再擴大百分之五,計算公式為:
其中,ΔU1表示多值波動范圍。
第五步:計算出電壓范圍差值之后,再計算相應的上限電壓和下限電壓,上限電壓為:
其中,U上表示最大上限范圍。
下限電壓為:
其中,U下表示最小下限范圍。
第六步:計算出上、下限最大范圍,超出這個范圍就為無用電壓數據,在這個范圍內才可以成為有用數據,如果有一段數據都超出這個范圍,對此只能強制的變換成為標準數據,預留存儲區存放的數據具體公式為:
第七步:設置好電壓后,按照改進極值中值濾波算法的原理再次過濾數據,這樣,最后保留下來的數據基本都是在標準范圍之間的數據。這樣不論數據在一段范圍內是否受到污染,都可以用改進的算法存儲數據。
3 數據結果對比
下面簡述傳統的算法與新式算法的數據對比,以標準電壓是6KV 為例,采集到了100 數據點,傳統的中值過濾算法刪除的數據如表2所示。

表2 極值中值濾波電壓數值表
刪除不合格的灰色數據后,形成的新的數據并經分組后的到的新數據如表3所示。

表3 極值中值濾波電壓數值排序表
表3中間加粗部分是極值中值算法得出的中值數據,灰色部分的三個數據是波動較大的數據。如果應用改進的極值中值濾波算法,這三個波動性較大的數據會被有效刪除,首先就是組成坐標為:(6.02,6.13),(5.39,5.60),(6.32,5.41),(6.23,6.01),(6.00,5.41),…,但是像采集數據的最后一組數據(5.79,10.98),會被此算法排除。其他的這些坐標全部在范圍圈內,可以確定此電壓的標準值為6KV,接下來是對數據分析。
從表3、表4 可以看出,表4 多刪除了三個波動性更大的數據,形成的新的數據并經分組后的到的數據如表5所示。
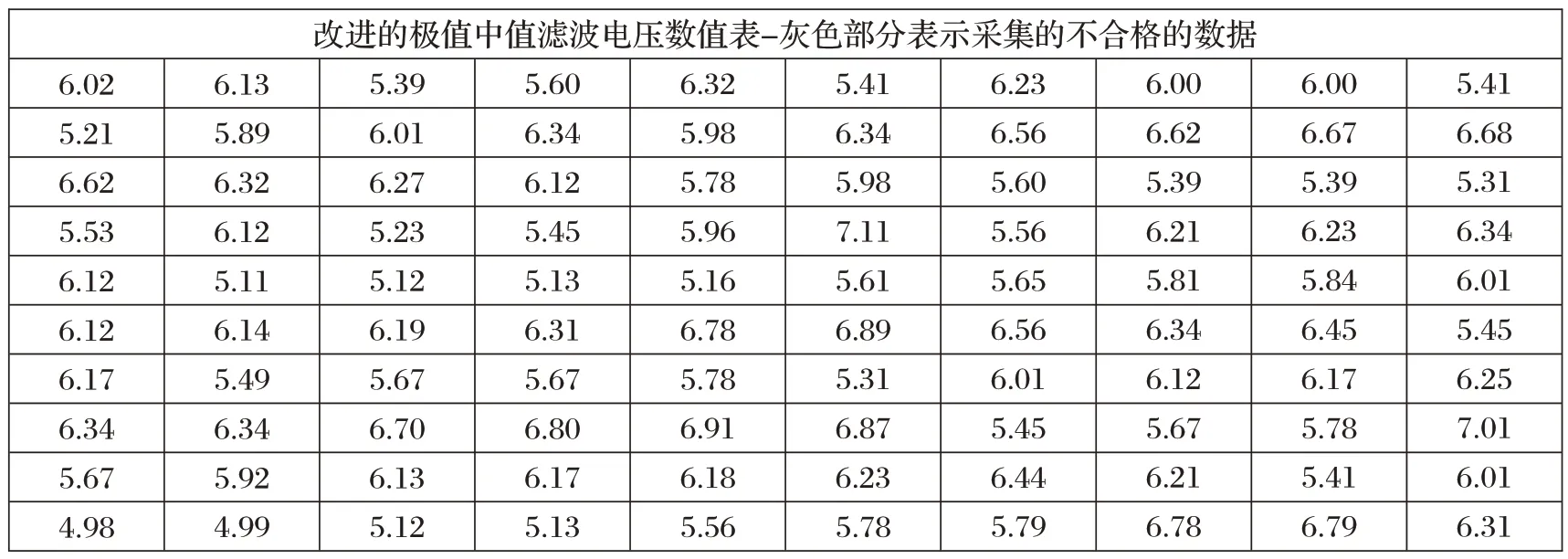
表4 改進的極值中值濾波電壓數值表

表5 改進的極值中值濾波電壓數值排序表
可以看到,改進的極值中值濾波算法比極值中值濾波算法過濾的更好一些,極值中值與改進的算法的數據對比如圖2 所示。極值中值濾波算法方差波動大,改進的算法相對波動的就小。

圖2 極值中值與改進的算法的數據對比
4 結論
利用中值原理,對當前的極值中路濾波算法進行改進,對收集好的數據進行濾波,將波動性大的數據刪除,保留下波動性相對較小、滿足算法理論條件的數據,提高了電壓檢測數據值的準確率和穩定性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
少先隊活動(2021年4期)2021-07-23 01:46:22
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
海峽科技與產業(2016年3期)2016-05-17 04:32:12
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16