起重機起升機構溜鉤原因分析及改進設計
2023-03-23 10:51:30劉艷群柯宏發
起重運輸機械 2023年2期
關鍵詞:變頻器
齊 健 劉艷群 劉 軍 柯宏發
1航天工程大學航天保障系 北京 102206 2 63601部隊 酒泉 732750
0 引言
在實際起重機空載運行檢查中,行走機構制動器失靈更易發現,能及時處理,危險風險小;起升機構空載運行時所需的制動力矩較小,即使制動器已處于故障狀態,依靠卷筒與鋼絲繩的摩擦力、減速器齒輪間的摩擦力以及傳動機構間的阻力也能實現制動功能,操作人員不易發現異常。當起吊產品負載運行時,便會出現負載制動轉矩不夠,導致起升機構溜鉤的問題。起升機構制動系統失效具有隱藏迷惑性,是起重機設備使用的一個重要安全隱患,故提高起重機起升機構制動系統的工作可靠性、安全性研究十分必要。本文研究了起重機起升機構的電力液壓制動系統,主要針對液壓推桿制動器工作原理及使用情況進行了分析,提出了起升機構溜鉤的有效防治措置[1]。并通過優化起升機構制動系統的控制電路和控制軟件,實現了起升機構溜鉤的自動應急處理,提高起重機設備的安全性和可靠性。
1 起升機構溜鉤原因分析
起升機構溜鉤的主要原因有2種:一是制動器抱閘力矩不夠,無法克服負載力矩而出現下滑,另一種是因機械卡滯或電控故障導致制動器無法正常抱閘。制動器制動性能主要受制動力矩、制動松閘間隙和閘瓦退距的影響。依據液壓推桿制動器工作原理,建立起重機設備起升機構溜鉤問題故障樹(見圖1),起升機構出現溜鉤問題的主要原因為制動器故障、控制元件故障、負載過大[2]。
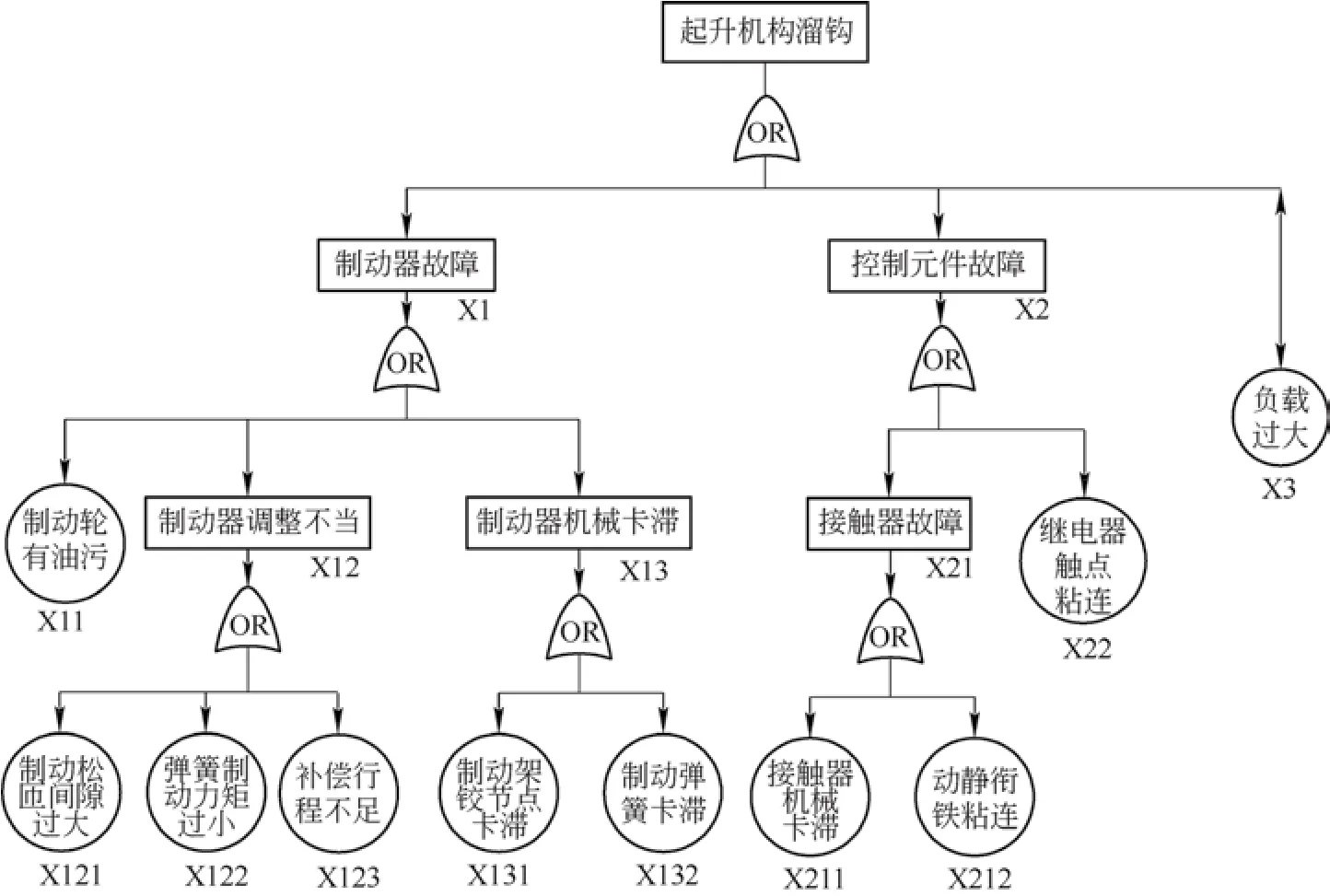
圖1 起升機構溜鉤問題故障樹
1.1 制動器故障
液壓推桿制動器故障主要包括制動輪有油污、制動器調整不當和制動器機械卡滯等原因。
1)制動輪有油污 制動輪上如果有油污會導致制動閘瓦與制動輪之間的摩擦系數變小,制動器抱閘時摩擦力不足會導致吊重物時停車下滑問題。制動輪上的油污主要來源于制動輪相連的齒輪聯軸器中的潤滑脂,潤滑脂油量過多或油封破損均會在制動輪運轉過程中將潤滑油甩濺至制動輪上[3]。
2)制動器調整不當 制動松閘間隙過大或制動力矩過小均會導致制動器制動力減小,吊鉤出現溜鉤現象。此外,制動器處于抱閘制動狀態時,制動輪和制動閘瓦之間應貼合緊密無間隙,如有間隙則制動閘瓦浮貼在制動輪上,制動力不能完全施加在制動輪上,導致制動力矩減小。正常狀態下制動閘瓦與制動輪之間的接觸面應該在75%以上。
液壓推桿上必須預留一定的補償行程(標準為10~20 mm),以補償制動閘瓦磨損變薄及運行振動引起制動間隙變化導致制動力矩變小。如果補償行程不足,小于最小補償行程值,則制動器不能可靠制動。
3)制動器機械卡滯 制動支架活動鉸接部位轉動不靈活,制動彈簧機械卡滯,導致制動器斷電后沒有可靠抱閘,仍處于松閘狀態,則吊鉤在吊物重力作用下滑落。
1.2 控制元件故障
起重機設備采用變頻調速方式,其在低頻下變頻器輸出工作電壓過低,不能驅動控制液壓推桿制動器正常工作,故液壓推桿制動器控制回路設計時需獨立于電動機控制回路。但相對于制動電壓從電動機接線端引入的方式,存在制動器推動器工作電動機與電動機斷電不一致性,從而存在溜鉤風險[4]。
制動器控制回路主要包括繼電器、接觸器和PLC。從使用情況分析,PLC工作可靠性高、軟件均經過工程化測試和管理,出現故障的概率低。但繼電器和接觸器在使用過程中多次出現動靜銜鐵粘連、機械卡滯等問題,均會導致機構停機后制動器供電回路無法斷開或斷電延遲,停車后制動器不能正常抱閘,吊鉤在吊物重力作用下出現下滑問題。
1.3 負載過大
吊物過重并超過額定負載會導致負載力矩過大,超過液壓推桿制動器的制動力矩時也可能會導致制動器溜鉤[5,6]。
目前,起重機設備均設有超載限制器,吊裝產品超過額定載荷90%時會報警提示,超過額定載荷110%時便會超載保護停機,故存在超載引起制動器溜鉤問題的可能性較小。
2 液壓推桿制動器控制系統優化設計
2.1 起重機設備起升機構液壓制動器應用現狀
對于一些應用在安全性要求較高場所的起重機,起升機構均采用雙液壓推桿制動器冗余設計,以提高制動系統的安全可靠性。在起重機設備年檢中要求測量制動器松閘間隙,并進行單制動器抱閘試驗(即1個制動器實現制動作用),2項檢測項目中僅需要1個制動器制動抱閘工作,另一個處于松閘狀態。目前常用的液壓推桿制動器有2類:一類是帶手動松閘裝置,可利用手柄裝置抬起制動器推桿;另一類無手動松閘裝置,一般使用撬杠強制抬起制動器推桿實現松閘。
在實際應用中,完成上述2項檢測項目后極易造成制動器兩側松閘間隙的不均等,主要原因是人為制動器松閘過程中會導致制動架受力不平衡,杠桿發生細微錯位變化。如果兩側松閘間隙存在較嚴重的不均等,且補償行程不足情況下,會導致一側制動襯墊在制動抱閘狀態下出現浮貼制動輪的現象,嚴重影響制動作用。因此,采用人為制動器松閘方式存在安全風險,若使用正常制動器松閘方式就能消除此種風險,則需對制動器控制電路進行改進設計[7,8]。
2.2 控制電路的優化設計
起重機設備起升機構液壓推桿制動器控制電路如圖2所示,采用1個接觸器同時控制雙液壓推桿制動器工作,正常操作使用時,SK1開關處于斷開狀態,繼電器KA2由PLC的制動器輸出控制,繼電器KA1為變頻器的制動器輸出控制;為了產品的吊裝安全,2個繼電器控制觸點為串聯關系,當任一繼電器斷電時,接觸器KMZ1線圈失電,可實現制動器A、B同時斷電抱閘。當PLC、手控盒、控制臺或通訊網絡出現異常,正常操作使用的DP通訊控制方式無法工作時,閉合開關SK1,屏蔽掉PLC對制動器的輸出控制,此時2個制動器的控制僅有變頻器輸出KA1控制,以實現PLC故障狀態下的應急操作,原理同上。
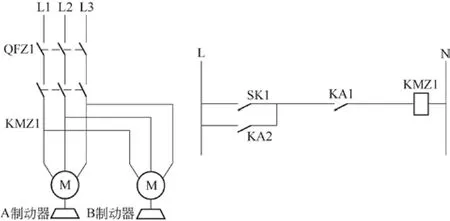
圖2 制動器控制電路圖
為實現起重機設備起升機構雙制動器在單抱閘試驗時能單獨控制,以便保持制動器工作狀態不被破壞和改變,同時又不影響雙制動器的工作可靠性,通過分析對制動器控制電路改動設計如圖3所示。通過設置2個接觸器KMZ1和KMZ2,每個制動器均設置單獨的接觸器控制,改進后制動器控制有4種工作狀態。
1)正常操作運行時雙制動器工作狀態 SK1、SK2、SK3開關斷開,制動器接觸器KMZ1、KMZ2由PLC輸出控制繼電器KA1和變頻器輸出控制繼電器KA2共同控制,繼電器KA1、KA2任一斷電時,接觸器KMZ1、KMZ2線圈失電,即可實現制動器A、B 同時斷電抱閘。
2)當PLC出現異常,采用應急操作時雙制動器工作狀態 閉合開關SK1,斷開開關SK2、SK3,繼電器KA1無法由PLC輸出控制時,制動器控制接觸器KMZ1、KMZ2由變頻器輸出控制繼電器KA2單獨同控制,繼電器KA2得電吸合,接觸器KMZ1、KMZ2線圈得電工作,制動器A和制動器B松閘;停機后,繼電器KA2斷電,控制接觸器KMZ1、KMZ2線圈失電,即可實現制動器A、B同時斷電抱閘。
3)單制動器單抱閘試驗 SK2開關斷開,SK1、SK3開關閉合,接觸器KMZ2線圈始終得電,制動器B一直處于松閘狀態,變頻器停止工作時,繼電器KA2斷電時,接觸器KMZ1線圈失電,僅制動器A斷電抱閘,檢驗制動器A單制動抱閘制動能力或測量制動器B的松閘間隙;SK3開關斷開,SK1、SK2開關閉合,接觸器KMZ1線圈始終得電,制動器A一直處于松閘狀態,繼電器KA2斷電時,接觸器KMZ2線圈失電,僅制動器B斷電抱閘,檢驗制動器B單制動抱閘制動能力或測量制動器A的松閘間隙。
4)單制動器控制回路故障時的應急操作 相對于原設計只有1個接觸器控制2個制動器,采用雙接觸器分別控制的方式提供了控制線路冗余的措施。當1個制動器的控制元件或控制線路出現問題不能松閘時,通過在轉接箱內就近將制動器供電電源線路短接(如圖3中虛線部分),可實現1個接觸器控制回路控制2個制動器的應急操作,特別針對接觸器輸出到制動器推動器的電源線路故障,是最有效且可靠的應急處置方法。

圖3 優化后制動器控制電路圖
2.3 檢測回路設計
當制動器控制回路的繼電器和接觸器在使用過程中出現動靜銜鐵粘連、機械卡滯等問題時,會導致機構停機后制動器供電回路無法斷開或斷電延遲,停車后制動器不能正常抱閘;或制動器的制動支架活動鉸接部位轉動不靈活,制動彈簧機械卡滯,導致制動器斷電后沒有可靠抱閘,仍處于松閘狀態,這些情況下吊鉤在吊物重力作用下均會滑落。因而,即使制動器制動信號正常發出,仍存在溜鉤風險,還需檢測制動器是否動作到位。
增加制動器打開到位行程開關,考慮到起重機存在正常使用和應急使用模式,故將到位信號送PLC控制器參與制動控制;同時也將到位信號直接點亮到位信號燈,供使用者掌握制動器實際動作情況。
3 起升機構溜鉤問題處置的軟件優化
3.1 總體思路
由于引起起重機設備起升機構溜鉤的因素較多,現有技術條件并不能保證產品吊裝過程中不會出現溜鉤,完全滿足高安全性要求。因此,需要對控制軟件進行優化,監控和應急處置起重機設備起升機構液壓推桿制動器溜鉤問題,以保障吊裝產品的安全。
目前,起重機設備普遍采用PLC實現集中監控,變頻器驅動控制各機構電動機實現速度調節和運行方向的改變。為提高起升機構的速度調節精度,同時避免機構出現超速和失速,起升機構電動機軸端均安裝有測速編碼器以實現對起升機構電動機的速度閉環控制。編碼器除了實現變頻器對電動機的速度閉環控制外,通過軟件數據處理,還可實現起升機構位置信息的測量[9]。
無論是因機械卡滯或電氣元件故障引起的制動器未抱閘制動,還是制動器調整維護不到位引起的制動力矩不夠而造成的溜鉤問題,都必然會導致起升機構位置值的變化。通過對起升機構停機后其位置值變化的測量,軟件監控系統便可監測并判斷起升機構是否溜鉤,控制系統則可自動采取相應的應急處理措施。
通常起重機起升機構采用提升機專用變頻器,具有零速保持功能,即電動機靜止不動的情況下,通過輸入相應的勵磁電流,也能保證額定載荷下不下滑溜鉤。因此,在軟件監測到起升機構出現溜鉤問題時,通過PLC輸出控制變頻器,驅動控制起升機構電動機在零速下保持靜止不動,以避免出現因制動器溜鉤而造成對吊裝產品的損壞[10]。
3.2 故障判別和軟件處理優化
3.2.1 溜鉤問題的軟件判別方法
在起重機設備的使用中,控制軟件在計算各機構行程時,由于起重機設備各機構位置的零位與所使用的編碼器零位并不相同,為補償各機構位置零位和編碼器零位的偏差,通常增加1個初始位置s初,故起重機各機構最終顯示和參與控制位置的位置值是由初始位置和計算行程來確定的,即
式中:k為電動機轉子角度行程與運行機構線性行程比例系數,s'為變頻器根據接收到的編碼器脈沖量計算得出的行程量。
PLC軟件進行位置計算時,實際變化的只有PLC從變頻器中讀取的變頻器內編碼器脈沖數值。因此,只要判斷在變頻器停止工作(PI1=0)時,在程序的1個掃描周期內讀取的變頻器內編碼器數值變化量Δs≥100,便可判斷電動機斷電情況下制動器失效而導致起升機構溜鉤,發出零速控制指令,起重機設備溜鉤問題PLC軟件判斷流程如圖4所示。
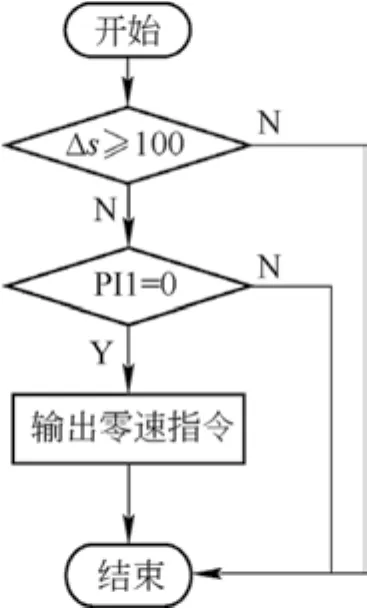
圖4 制動器溜鉤問題判斷流程圖
3.2.2 制動器溜鉤問題的軟件應急處理措施
控制軟件判別出起升機構溜鉤后,PLC需通過通訊控制網絡給變頻器發送零速正向運行的指令,以使電動機輸入相應的勵磁電流,產生提升轉矩以平衡吊裝產品質量帶來的負載轉矩,避免吊裝產品繼續下滑帶來的危害。圖5為起重機設備起升機構溜鉤問題處理程序示意圖,應急處理程序中設置3個中間變量M0.1、M0.2和M0.3,變量M0.1存儲行程檢測位置變動,超過設定值為1(高電平),否則為0(低電平);變量M0.2判斷變頻器工作狀態,讀取的是變頻器的狀態字PI1,0(停止)是高電平,1(正轉)和-1(反轉)為低電平。變量M0.1、M0.2均為高電平時,輸出變量M0.3,作為PLC發送控制指令給變頻器實現零速保持功能的條件,同時輸出故障報警Q0.3,既可以聲光報警,也可以在工控機或觸摸屏上顯示起升機構溜鉤的故障信息。為了保持PLC發送控制指令給變頻器,避免因變頻器停機狀態(變量M0.2)變化帶來的影響,設置了變量M0.3的軟件自保持電路,故障排除之前,使其始終保持零速保持狀態。當人為確認故障已排除,產品處于安全狀態時,可通過功能鍵(故障屏蔽I0.2)解除應急處置,PLC給變頻器發送停止指令,電動機停止運轉,制動器抱閘。
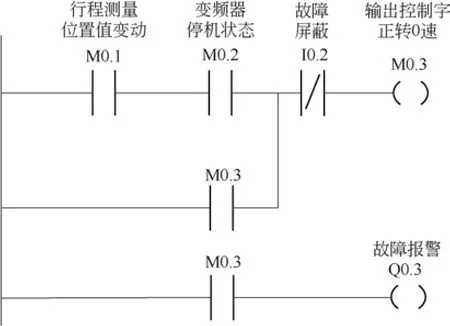
圖5 起升機構溜鉤問題應急處理程序示意圖
4 液壓推桿制動器的日常防治措施
4.1 液壓推桿制動器安裝與調整
液壓推桿制動器的調整包括制動力矩、制動松閘間隙和補償行程的調整,在制動器初裝和更換新閘瓦后必需進行制動器的各項調整,在使用過程中如果無異常情況一般無需調整。
制動器是根據制動力矩來選擇的,起升機構的制動力矩Mzh為
式中:Kzh為制動安全系數,重型機構每個制動器的安全系數為2;Mj為制動輪的制動靜力矩;Q為起重量;m為滑輪組倍率;D為卷筒直徑;η為機構沖動效率(0.85~0.9);i為機構速比。
實際使用中,制動器選型后,制動器制動力矩的最大值在出廠時已設定,現場需根據起重機額定負載試驗情況在最大值和50%最大值內選擇和調整合適值。
制動松閘間隙的大小影響制動響應時間和制動力矩,其大小應適中。間隙過小一方面會使鋼絲繩承受過大的沖擊負荷,對起重機橋架產生較大振動,另一方面易導致制動輪與閘瓦產生運行干涉,出現異常發熱和噪音;間隙過大會導致制動力矩下降。制動松閘間隙根據制動器規格不同,其大小要求也不同。制動輪越大則制動松閘間隙越大,且隨著制動閘瓦襯墊的磨損而逐漸增大,需在規定時間內檢測和調整,制動松閘間隙一般為0.6~1.2 mm。制動松閘間隙通過轉動制動拉桿來調整。
液壓推桿的行程包括工作行程和補償行程2部分,非工作狀態下伸出液壓缸的活塞桿長度為補償行程,推動器工作時活塞桿再伸出的部分為工作行程;補償行程主要是補償閘瓦長期磨損導致的制動間隙變化,以避免實際作用在制動輪上的制動力矩減小。為安全起見,制動補償行程一般設置10~20 mm,最小補償行程為6 mm,當補償行程低于最小補償行程時,便不能保證足夠的制動力矩,易出現溜鉤問題。補償行程也是通過轉動制動拉桿來調整。
4.2 制動器的檢查與維護
起重機設備運行前應檢查項目包括:1)制動閘瓦摩擦面是否有影響摩擦力的油污及其他雜質;2)制動器抱閘后制動輪與制動閘瓦襯墊之間應接觸緊密、無間隙;3)制動輪的制動面不得有銹蝕、油污、不平滑等缺陷;4)制動閘瓦襯墊的磨損情況,若制動襯墊有效磨損厚度<3 mm時應更換,每換一次都應重新調整;5)補償行程是否滿足使用要求;6)制動彈簧有無斷裂,工作長度是否有變化;7)液壓推動器液壓油的數質量檢查;8)檢查測量制動器松閘間隙是否滿足使用要求。
使用過程中的檢查內容包括:1)推動工作行程(即閘瓦退距)是否正常;2)制動彈簧工作中有無卡滯;3)制動架的活動鉸接點是否卡滯,導致制動器的開啟和閉合動作緩慢或不動作,如出現卡滯則及時打磨銷軸和進行潤滑處理;4)制動輪和制動襯墊有無摩擦發熱和異常噪聲;5)檢查液壓推動器工作情況,活塞桿是否因缺油或進有氣體而導致不能伸出到位;6)對起升機構做額定載荷的單抱閘,考驗單制動器制動性能時,應在單抱閘制動狀態下持續一段時間,時間太短無法看出制動器是否有溜鉤問題,無法檢驗單個制動器制動力矩能否滿足使用要求,不能保證單制動器工作的有效性和可靠性。
5 結論
本文針對起重機起升機構溜鉤問題,結合液壓推桿制動器工作原理及使用情況,對起升機構制動失效機理進行了分析,結合起重機設備液壓推桿制動器控制原理,提出了其控制電路和控制軟件的優化方案,并從安裝調試和維護使用方面提出了有效的防治措施,提高了起重機設備使用的安全性和可靠性。
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
