基于智能小車的鄉村社區環境監管系統設計
2023-03-24 15:26:40王春宇張道誠徐宏偉姜林
電腦知識與技術 2023年4期
王春宇 張道誠 徐宏偉 姜林

關鍵詞: 智能小車;自動巡航;不文明行為識別;臟亂環境檢測; 鄉村環境治理
1 概述
建設美麗鄉村,必須以生態為本,在鄉村振興戰略的持續影響下,鄉村社區治理工作逐漸受到重視[1]。但是,由于鄉村社區生活環境治理受到各種因素影響,導致環境保護形勢不容樂觀,環境監管急需加強[2],新農村的社區環境建設仍存在很大問題。
隨著鄉村的日益發展,鄉村治理手段日益增加,調查顯示,我國現有鄉村社區環境治理方法有如下幾點:吳惟予、肖萍倡導從生態文明的角度引入契約關系,以環境自治契約為核心構建鄉村環境契約管理體系[3];楊浩勃、黃斌歡、姚茂華支持限制政府支持市場的盈利傾向,并在鄉村地區建立受國家、市場和社會影響的環境治理平衡[4];趙永峰基于長期健康的鄉村綜合治理視角,倡議健全鄉政府管束機制,促進全民參與,完善法律管制[5];肖萍、朱國華認為,引入第三方治理是解決農村環境資本匱乏、法治缺失、主體不明等問題的重要途徑[6]。
總體來說,我國鄉村生活環境治理主要應用兩種模式,一種是傳統治理模式,另一種是新興的PPP模式[7]。傳統鄉村社區生活環境治理模式屬于“政府直控”模式。PPP模式主要是政府機構與私營部門進行合作,政府給予政策支持,私營部門通過產品及服務端實現鄉村社區治理[8]。不論是傳統治理模式還是新興的PPP模式,均存在以下兩點問題:
(1) 鄉村社區環境治理中村民主體意識缺失[9]。“免費搭車者”現象在環境治理中較容易產生,從而“政府干、群眾看”情形在某些地方成為一種常態。
(2) 政府主導作用發揮不充分[10]。該問題主要體現在管理體制的不完善,包括基層政府管理的碎片化、多頭化等,造成對鄉村社區生活環境治理監管的匱乏。
針對以上兩點問題,本文提出一種基于智能小車的鄉村社區智慧環境監管系統,實現對鄉村社區環境進行治理。不同于傳統的治理方式,它將搭載了自動巡航、臟亂環境檢測、不文明行為識別、智能語音播報功能的小車投入鄉村進行使用,通過智能小車協助管理人員,達到規范村民的行為、養成良好的環境意識、更好地治理環境的目的,從根本上對鄉村社區環境進行整治。
2 系統架構
基于智能小車的鄉村社區環境監管系統架構如圖1所示,該系統以智能小車作為硬件平臺在鄉村社區進行自動巡航,主要負責圖像數據采集,并將采集到的數據經由深度神經網絡識別模型,將不文明行為識別結果和臟亂環境檢測結果反饋至監管后臺,鄉村社區環境治理人員依據監管后臺數據對鄉村環境進行治理。
3 關鍵算法設計
3.1 自動巡航算法設計
自動巡航算法主要包括地圖構建(Gmapping 算法)與路徑規劃(TEB 算法),自動巡航流程如圖2所示。
3.1.1Gmapping 算法
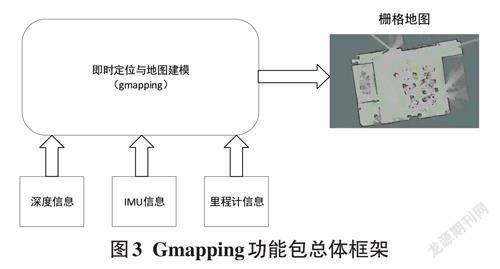
Gmapping 是2007 年由GiorgioGrisetti 和Cyrill?Stachniss等人提出的[11],它是一種基于Rao-Blackwellized粒子濾波器的二維激光SLAM技術。Gmapping可以實時構建環境地圖,且地圖精度較高,對激光雷達掃描頻率要求較低等優勢,因此,本文采用該算法進行實時定位與地圖構建。
ROS提供了一個Gmapping的算法功能包,它的整體架構見圖3,它可以為智能小車的深度信息、IMU信息、里程表信息以及在完成必要的參數設置后生成并輸出二維網格圖。
3.1.2 TEB 路徑規劃算法
TEB算法就是在起點與終點位姿的全局路徑中以時間ΔTi 為間隔均勻插入N個中間位姿,對各個中間位姿施加約束。通過這個優化變形,找到滿足各種約束的最終可行路徑[12]。
設智能小車的n 個位姿Si = [ x ] i,yi,δi ,xi,yi 表示智能小車的位置信息,δi 表示方向。則智能小車的位姿有序序列為:
通過合并連續位姿的時間間隔,生成一個時間間隔序列:
智能小車的軌跡表示為:
加速度的約束是根據兩個連續的平均速度計算,通過歐氏距離單位時間內的變化量計算,需要考慮三個連續位姿和相應的兩個時間間隔:
規劃出的路徑以時間最優為目標,該方法代替了其他路徑規劃算法以路徑最短為目標的做法,可使智能小車花費最短的時間到達目標點,時間約束的目標函數:
3.2 不文明行為識別與臟亂環境檢測算法設計
考慮到計算機本身的性能問題以及便捷的云平臺,最終模型的訓練與導出均在飛槳平臺AISTUDIO上完成,模型的部署及測試在樹莓派上完成。
3.2.1 模型選擇
本文本著略微降低精準性,極大提高推理速度的原則,對目標檢測算法進行研究。經過對現有主流檢測算法的資料查閱以及實驗,發現PP-YOLOv2[13]算法不僅推理速度快,而且精確度高,故本文最終選用PP-YOLOv2模型。
3.2.2 模型訓練
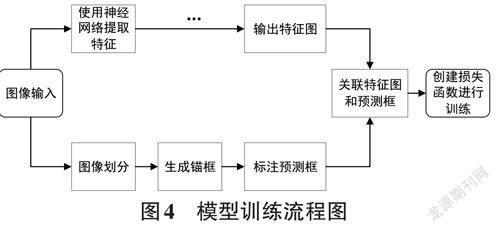
PP-YOLOv2模型的訓練過程可以分成兩部分,如圖4所示:
上方支路使用卷積神經網絡對圖像進行特征提取,并對候選區域的位置和類別進行預測。特征圖的大小隨著網絡不斷向前傳播而逐漸縮小,每一個像素點都表示了更為抽象的特征,直至最終得到特征圖。下方分支則是按一定規則在圖片上進行圖像劃分,然后生成錨框,根據候選框與真實框的位置關系,生成預測框。最后關聯上方的特征圖與下方的預測框,創建損失函數,對模型進行訓練。
為了解決鄉村街道圖像中的環境復雜、少量的特征圖難以得到高性能的不文明行為識別與臟亂環境檢測模型的問題。
首先,擴大輸入圖像尺寸,擴大輸入是為了增大目標區域,從而使網絡更容易捕捉小尺幅目標的信息。
其次,在檢測頸采用了FPN(特征金字塔網絡)的變形之一——PAN[15(] 路徑聚合網絡)由頂部到底部進行特征信息聚合。檢測頸采用的激活函數為在YO?LOv4和YOLOv5上表現良好的mish激活函數。
最后,為了解決最終的檢測對象預測忽略了IoU的問題,本文采用將對象預測與IoU綜合起來得到一個新的對象預測的做法:
3.2.3 模型的導出與部署
模型導出通過PaddleDection將訓練好的模型進行導出,通過PaddleLite將導出模型轉換為nb文件并嵌入樹莓派,然后在樹莓派端安裝PaddleLite工具,最后在樹莓派端利用PaddleLite工具進行相應的部署。
4 系統實驗
4.1 硬件系統
本文的主體是EPRobot智能機器人小車,EPRobot智能機器人小車是計算機編程、機器人開發以及嵌入式系統開發等方向定制開發的學習平臺。小車主要由樹莓派4B、底盤控制器、激光雷達、深度相機、2個配有編碼器的電機以及底盤組成。它內置了Ubuntu18.04操作系統,并安裝了ROS-melodic版本的機器人開發框架,不僅可以進行嵌入式Linux系統以及ROS系統的實踐與開發,同樣能夠非常方便快捷地實現各種機器人控制的算法與程序。
4.2 軟件平臺
為了能夠通過一系列的指令實現對機器人小車的控制,使其完成同步定位與建圖以及識別等工作。在個人PC端通過與機器人小車端連接進行數據關聯,ROS 系統將數據無線傳輸,組建成一個完整的平臺。
4.3 數據集介紹
PASCAL Visual Object Classes(簡稱PASCALVOC)[16] ,是一個世界級的計算機視覺挑戰賽。2005年~2012年間,該視覺挑戰賽每年都發布帶標簽的圖像數據庫并開展算法競賽,由此產生了一系列數據集。本文使用的數據集為VOC格式數據集,其中,標簽文件存放到Annotations 文件夾中,樣本圖集存入Images文件夾中。其中250張樣本作為驗證集,1575張樣本圖片作為訓練集,675張樣本作為測試集。
4.4 實驗效果及討論
智能小車通過巡航算法在鄉村社區進行自動巡航,通過車載攝像頭實時采集圖像數據,運用不文明行為識別和臟亂環境檢測算法識別不文明行為和檢測臟亂環境。實驗在學校教學樓旁道路展開,其場景整體較為適合模擬鄉村社區道路模擬。實驗結果如圖5、圖6所示。
5 結論
本文通過對鄉村社區環境治理現有模式的研究發現,現有模式主要存在村民在環境治理過程中主體意識缺乏的弊端,針對這一問題,本文設計一種基于智能小車的鄉村社區環境監管系統。該系統同傳統治理方式不同,其在通過智能小車實現智能監管的同時,在很大程度上解決了村民主體意識缺乏的問題,從而有力推動了鄉村振興的建設。
