起重用變頻器速度監視故障機理分析與處理
2023-03-27 01:04:30劉艷群王靜宇
起重運輸機械 2023年3期
齊 健 劉 軍 劉艷群 王靜宇
1航天工程大學航天保障系 北京 102206 2 63601部隊 酒泉 732750 3航天員科研訓練中心管理保障處 北京 100094
0 引言
航天發射場起重機設備承擔著試驗產品的吊裝對接,是航天發射場直接與試驗產品接觸的關鍵地面設備,產品吊裝過程中一旦控制系統出現問題,將導致設備無法正常運行,影響試驗流程。
為提高起重機設備工作的安全性、可靠性和使用性能,以滿足日益頻繁的試驗產品吊裝工作的需要,發射場新增起重機設備和新改造起重機設備均采用高性能的起重用變頻器作為各運行機構的調速控制設備。作為起重機設備的主要控制元件,變頻器工作可靠性高、故障率低,調速性能好,且基本不用維護[1],使得發射場起重機設備工作可靠性得到有效提高。
但在變頻起重機的調試和初期使用中,仍會出現較多的參數設置和設備安裝質量問題,特別是對調速精度要求高的起升機構[2],由于變頻器采用速度閉環控制方式,容易出現變頻器因速度監視故障而保護停機,據統計,速度監視保護故障占變頻器故障報警的80%以上,速度監視故障已成為變頻調速起重機重點關注的故障模式。
由于造成變頻器速度監視故障的原因較多,涉及軟件參數設置、設備硬件選型、接線錯誤和機械卡滯等多方面因素,導致出現速度監視故障后故障定位比較難,問題處理時間較長。為此,本文分析了起重機變頻器速度監視故障產生的機理和原因,并結合自身工作經驗研究給出了故障判斷流程和有效的處理方法,為今后發射場起重機調試和故障處理提供技術支持,有效提高了發射場起重機設備的故障處置能力。
1 變頻器速度閉環控制原理
由于航天發射場起重機設備主要用于航天產品吊裝對接工作,對起重機的性能和安全性要求很高,通常要求產品對接速度慢和空鉤運行速度快、調速范圍寬,即使在極低的速度下也要求具有高動態性能和高轉速精度。因此,航天發射場起重機設備起升機構變頻器均采用帶速度傳感器方式的矢量控制系統[3],其控制原理框圖如圖1所示。
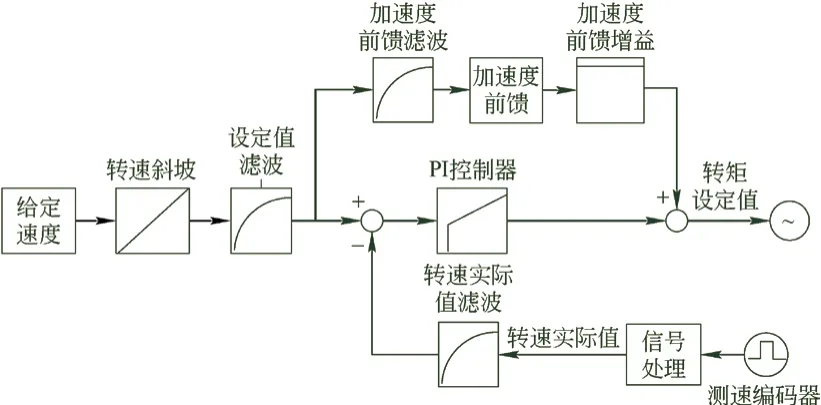
圖1 變頻器速度閉環矢量控制原理框圖
速度閉環矢量控制采用PID控制形式,其反饋信號采用了電動機軸端安裝的增量編碼器所產生的脈沖信號。變頻器接收到脈沖信號后,經過信號處理,轉換為電動機實際運行速度值,與變頻器接受的給定值比較,得到一個偏差值。針對這個偏差值,經過PI調節器調節,控制變頻器改變其輸出頻率,從而改變作用到電動機轉軸上的電磁轉矩,迅速、準確的消除電動機的轉速偏差,恢復到給定值。采用速度反饋的矢量控制方式,其系統振蕩和誤差都比較小。
系統中加速度前饋環節可根據速度偏差的變化趨勢,提前給出較大的調節動作,從而縮短調節時間,克服了因積分時間太長而使恢復滯后的缺點。
2 變頻器速度監視故障原因分析
2.1 變頻器速度監視故障機理
變頻器速度監視故障的一般發生在加減速過程中未到達設定的速度值和正常運行在設定速度過程中出現一段時間的速度不穩定2種情況下。在加減速過程中,如果系統在設定的斜波監視時間和速度監視時間內系統測量的轉速實際值不能達到新設定的速度值(見圖2),則系統會因速度測量環節有問題而產生一個速度監視故障信息。在設備按設定速度正常運行過程中,因受外部因素影響或速度監視回路環節出現故障,測量實際速度波動較大,導致在速度監視時間內實際測量速度值不能達到設定速度值而產生速度監視故障信息。針對速度監視故障的處理,變頻器參數設置有故障停機和故障報警2種選擇。對于設備安全性要求高的情況下,一般均設置為保護停機功能,發射場起重機設備變頻器針對速度監測故障通常采用故障停機的保護模式。
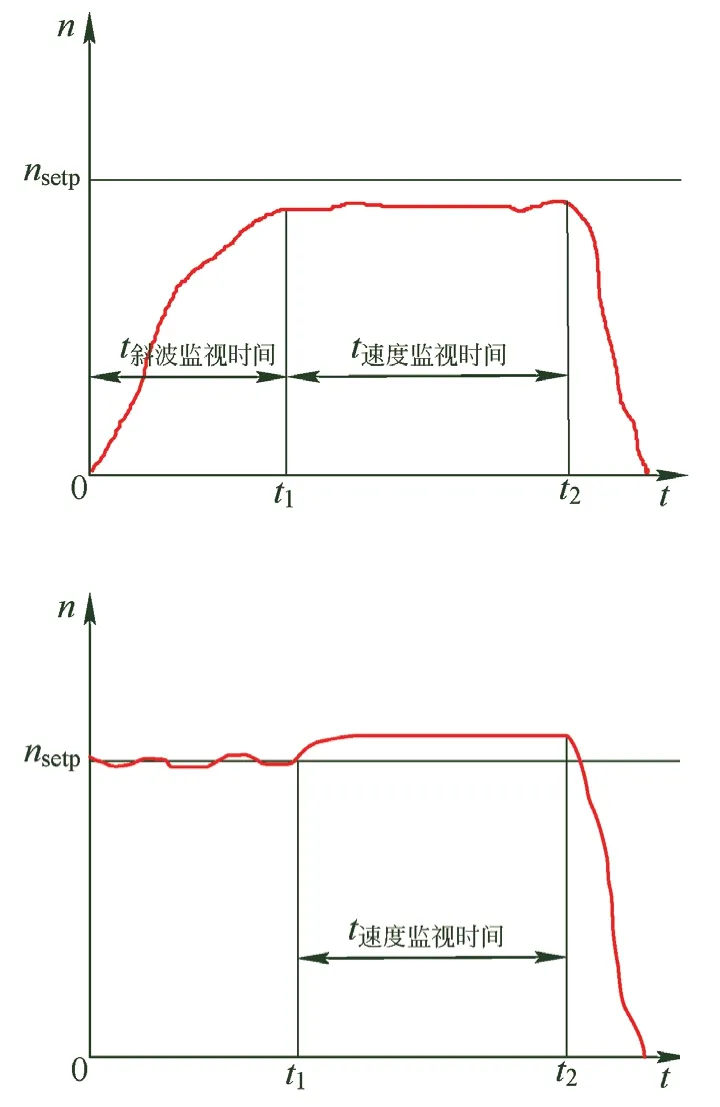
圖2 變頻器速度監視故障機理
由上述可知,變頻器速度監視故障無論哪種情況下產生,都是在設定的時間內,系統測量計算的實際速度值與設定值一直存在偏差,只是設定的監視時間不同。由于參與比較的是系統測量計算的速度,速度測量故障的發生存在著2種情況,一是速度測量環節出現故障,導致即使實際運行速度達到設定速度,也會報速度監視故障而保護停機的故障發生,另一種情況是由于設備問題或負載過大導致的實際轉速不能達到設定速度而故障報警。
2.2 變頻器速度監視故障原因分析
根據起重機變頻器速度閉環矢量控制原理和速度監視故障機理,造成變頻器出現速度監視故障主要有4個方面的原因:測速回路故障、軟件參數設置、電源相序錯誤和電動機過載。圖3為變頻器速度監視故障的故障樹。
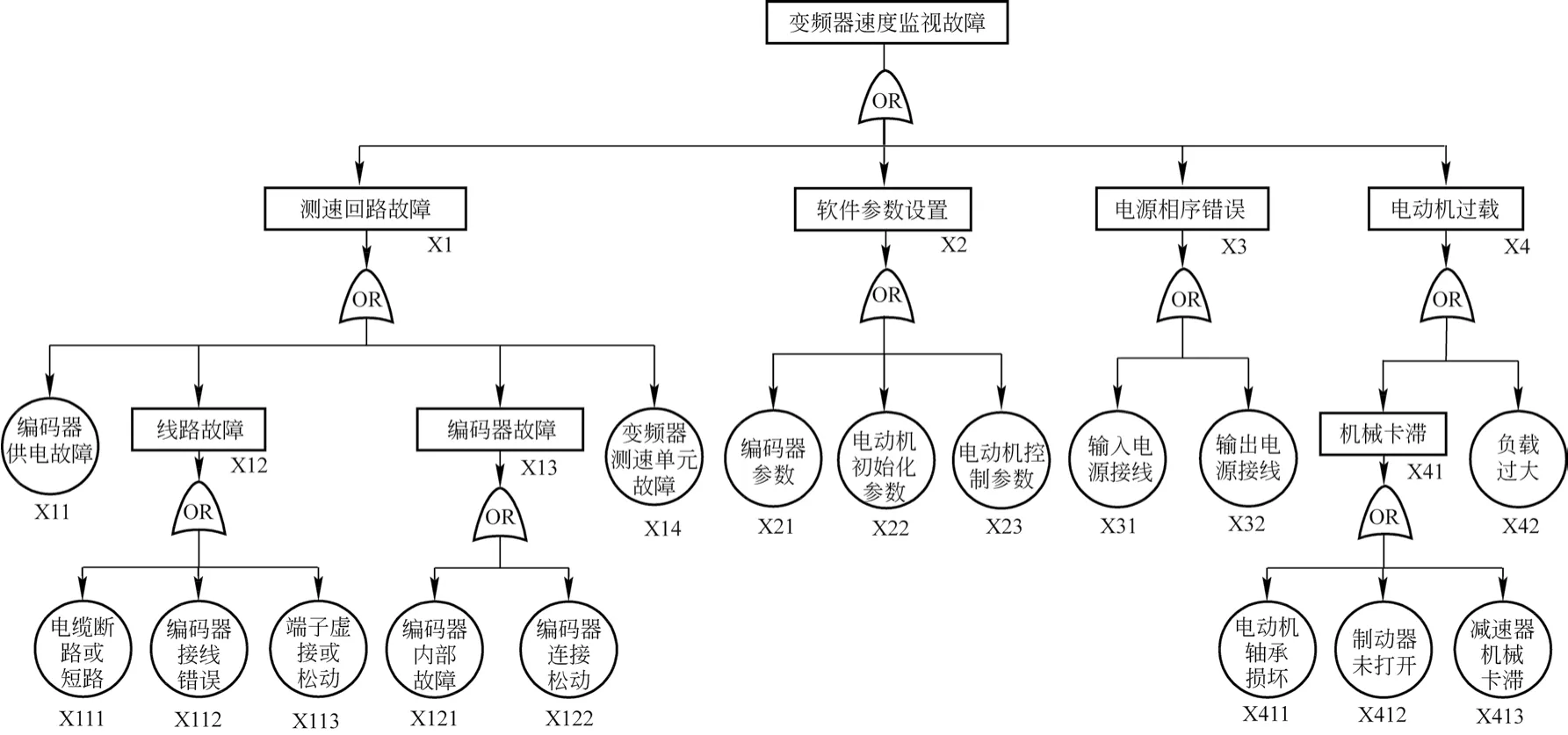
圖3 變頻器速度監視故障樹
1)測速回路故障 變頻器測速回路包含增量編碼器、線路、變頻器測速單元(編碼器卡)、供電電源等,影響因素多,是造成變頻器速度監視故障保護停機的主要故障因素。供電電壓不正常、信號線路不通、編碼器機械連接松動、編碼器卡故障、測速回路接線錯誤均會導致變頻器無法接收到正常的脈沖信號,造成速度測量計算出現偏差。
2)變頻器參數設置 要實現起重機變頻器的矢量控制功能[4],必須根據電動機自身的參數一系列等效變換的計算,而進行計算的基本條件是盡可能了解電動機的各項數據,即電動機的初始化參數,不同的變頻器有不同的要求,如某品牌變頻器僅需輸入電動機的額定電壓、額定功率、額定電流參數,其他性能參數通過變頻器自學習功能測量計算獲得。為了獲得精確的數據,其自學習時需要將負載與電動機脫離,而SEW變頻器通電測量計算則不需要將負載與電動機分離,但要求輸入的電動機參數較多,在輸入電動機銘牌數據的基礎上,還需輸入電動機轉動慣量、電動機效率、負載轉動慣量等。如果輸入數據與電動機實際參數值不符,便會導致變頻器計算出的動態控制參數偏差較大而造成電動機轉速不穩,出現速度偏差。
實現速度閉環控制時,需要設置編碼器的類型,包括編碼器的信號輸出形式和每轉脈沖數。這些是變頻器接受編碼器脈沖數后,轉換處理成轉速實際值的計算依據,信號輸出形式和每轉脈沖數設置錯誤,便會導致計算出的實際速度值偏差較大。
根據變頻器速度監視故障機理可知,最終導致變頻器速度監視故障的原因是監視時間內測量實際速度值未達到設定速度值。因此,在電動機轉速控制環節,電動機的加減速時間、斜波監視時間和速度監視時間都會影響到變頻器的速度監測。通常,變頻器經過電動機初始化計算后,這些參數能夠給出合理的設置。但考慮起重機設備負載為變負載,空載和負載運行時差別比較大,其負載轉動慣量多為估算(經驗值為電動機轉動慣量的5~10倍),電動機初始化參數并不一定滿足不同負載的要求,如加減速時間設置偏小,便會導致負載時升速電流過大而過流保護。故需對加減速時間等進行手動設置以滿足不同負載情況的需要。此時需注意加減速時間和斜波監視時間的匹配關系,否則會因加減速時間過長而導致變頻器出現速度監視故障。
3)變頻器電源相序故障 在變頻器采用速度閉環矢量控制模式時,變頻器輸入側電源和輸出到電動機的電源的相序均會影響速度測量,主要影響到速度脈沖數增減的方向,即電動機測量速度的方向。方向與設定速度方向不一致,同樣會導致變頻器出現速度監視故障。
4)電動機過載 電動機過載會導致電動機的實際轉速達不到設定速度,在監視時間如果電動機電流還未超過設定的電流極限,而實際測量速度仍達不到設定值,變頻器便會先出現速度監視故障,先達到電流極限值便會出現過流故障。電動機過載原因主要有外部負載過大、制動器未打開、電動機和減速器軸承卡滯等。
3 變頻器速度監視故障排查及處理方法
針對變頻器速度監視故障的4個方面的原因[5],其出現故障的概率是不同的,其中變頻器軟件參數設置故障和電源相序錯誤基本只在調試階段發生,而速度測量回路故障和電動機過載故障在調試期間和使用過程中均可出現。因此,在不同的使用環節排查的重點不同,并且采用先易后難、先簡單后復雜的順序。圖4為變頻器速度監視故障判斷流程圖。
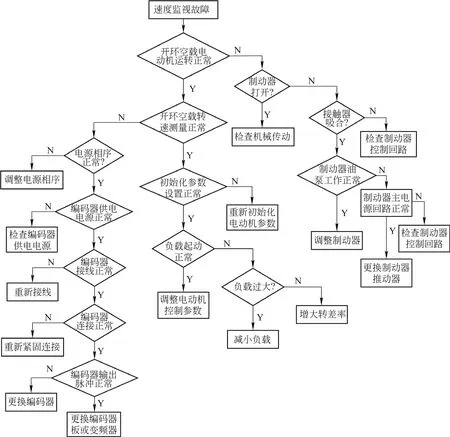
圖4 變頻器速度監視故障判斷流程
3.1 設備調試時速度監測故障排查及處理
起重機設備安裝調試時,首先要確保起重機空載無速度監測的矢量控制模式下(VFC)運行正常,然后再設置為速度閉環矢量控制模式(VFC-n-control或VFC-n-control&hoist)進行調試運行。此時如果出現速度監視故障,則說明不是設備外負載因素導致的,需要從測速回路、軟件參數設置和電源相序3個方面檢查分析故障原因[6]。
檢查時,可將變頻器設置為無速度監測的矢量控制模式下運行,通過變頻器面板或專用調試軟件監測變頻器接收到得編碼器脈沖數是否正常。如果脈沖數不隨電動機運轉變化,則是編碼器回路故障;脈沖數有變化,但增減方向與電動機旋轉方向相反,則為編碼器A、B 2對信號線接反,或電源相序錯誤;脈沖數量有變化,且變化方向與電動機旋轉方向一致,則一般為變頻器軟件參數設置問題。
3.1.1 編碼器測速回路故障處理[7]
1)檢查編碼器供電是否正常,在編碼器進線端測量供電電壓值是否在允許范圍內。
2)用萬用表測量信號線路的導通情況,檢查信號線路是否正常;檢查接線的正確性,有無A、B 2組信號線接反等接線錯誤。
3)檢查編碼器與電動機的鏈接緊固情況,連接松動的要及時緊固,并查明松動的原因,因同軸度誤差較大導致異常振動造成松動的,要調整編碼器安裝的位置,使編碼器軸與電動機軸同軸度滿足使用要求。
4)采用示波器在編碼器輸出端測量編碼器輸出脈沖波形,增量編碼器輸出信號正常為方波,如果無脈沖或脈沖波形不正常,則為編碼器故障,需要更換編碼器。某廠房大廳主起升機構使用中出現該類型問題,測量編碼器輸出的A、B 2路脈沖如圖5所示,其中A路脈沖正常,為正常的方波信號,而B路脈沖方波信號有明顯的干擾變形。由于脈沖波形不正常,導致變頻器編碼器卡無法識別接收到得脈沖,從而無法計數。

圖5 某廠房起重機主鉤故障編碼器輸出脈沖測量示意圖
5)如果編碼器輸出脈沖正常,測量變頻器編碼器板進線處編碼器輸出脈沖波形,如果波形正常,則為編碼器板故障,需更換編碼器板;波形有較大干擾毛刺,則為線路的信號干擾,檢查屏蔽信號線接地情況,并檢查編碼器信號電纜與電動機動力電纜是否分開敷設,在施工過程中應盡量使編碼器信號電纜與電動機動力電纜是否分開敷設。
要想盡量減少變頻器的測速回路故障,除加強日常對測速線路的檢查力度外,要做好設備的設計選型和嚴把施工質量。編碼器選擇應選用工作可靠性高、抗干擾能力強的成熟產品,增量編碼器盡量選用信號輸出為TTL的產品,TTL信號取通道A、通道B、通道、通道,而HTL 取通道、通道。TTL信號處理采用差動式放大器可以消除共模干擾信號,達到了抑制傳輸干擾的效果,抗干擾能力強,適合長線驅動方式。編碼器采用空心軸方式,與電動機軸的連接更可靠,安裝的同軸度更容易調整。此外,信號輸出為TTL的信號電纜采用雙絞線屏蔽電纜,可提高線路的抗干擾能力,線纜的連接采用O形接線端子能夠保證端子接線的可靠性,電纜插頭的連接采用螺釘緊固相對于焊接更容易檢查和維護,這些都是設備選型和安裝調試應重點注意的問題。
3.1.2 電源相序錯誤
調整變頻器輸出電源的任一兩相,觀察變頻器監視的編碼器脈沖值變化方向是否正確,如正確則改為速度閉環矢量控制方式運行;如變頻器仍出現速度監視故障,則調整變頻器輸入電源相序,同時變頻器輸出電源相序也做相應調整,再采用速度閉環矢量控制方式運行,如變頻器仍出現速度監視故障,應為變頻器軟件參數設置問題。
部分變頻器(如發射場常使用的變頻器)因脈沖增減方向不同而出現速度監測故障時,僅需要調整編碼器A、B 2組信號輸出即可,將A、B 2組信號對調,不需要調整電源的相序。
3.1.3 變頻器軟件參數設置
判定為變頻器參數設置問題時,需要對變頻器進行重新初始化,認真核對電動機參數和編碼器設置值,特別是電動機轉動慣量、負載轉動慣量的設置。部分電動機銘牌未標注,一定要查到準確數據,檢查編碼器類型和編碼器輸出每轉脈沖數,還有部分變頻器對增量式編碼器輸出信號形式有TTL和HTL的區別,需要根據實際的編碼器選型設計來選擇[8]。
初始化計算電動機運行參數后,分別在空、負載情況下運行電動機,根據實際調試情況檢查加減速時間和監視時間(設置加減速時間過短,易出現變頻器過流保護,設置時間過長,便會出現速度監視故障),直到空載、負載情況下均能正常運行。特別注意的是變頻器加減速時間設定的是以3 000 r/min為基準的,實際的加減速時間是根據電動機運行轉速成正比例變化的。
電動機變頻調速運行過程中,在低頻運行時,受電動機定子阻抗的影響,電動機電磁最大轉矩減小,導致電動機在低頻運行時因起動轉矩不夠而造成電動機無法起動或低速運行速度不穩。因此,起重機設備滿載運行時,可能會遇到低速無法起動,變頻器出現速度監視故障報警停機的情況。此時,需要使用變頻器的電壓補償功能或滑差補償功能。電壓補償是針對每個工作頻率的電壓調節,其本質是增加勵磁電流或抵消由于定子阻抗壓降引起的勵磁減小,其固有機械特性發生了變化。滑差補償是按檢測或計算得到的電流或轉矩值來進行給定或頻率的微調,不對磁場產生影響,不會導致磁飽和或弱磁,因而不會出現電動機過流,但由于計算依賴電動機的電阻和電感值,受溫度變化影響較大,補償穩定性差。因此,在實際應用中,首先在電流允許范圍內調節電壓補償,如果調節過大導致變頻器出現過流保護,則降低電壓補償,增大滑差補償。該種情況在某塔式起重機主鉤調試過程出現過,通過增大滑差補償值(某變頻器參數324由44改為56),解決了冬季寒冷天氣條件下滿載無法起動,變頻器頻繁出現速度監視故障的問題。
3.2 設備正常運行時速度監測故障排查及處理
設備安裝調試后,電源相序、變頻器軟件參數設置方面已固化,一般不會影響設備正常運行。設備使用過程中再出現變頻器速度監視故障,需要重點檢查編碼器測速回路故障和電動機過載等方面的影響。檢查時,同樣先將變頻器設置為無速度監測的矢量控制模式下運行,電動機運行正常,并通過變頻器面板或專用調試軟件監測變頻器接收到得編碼器脈沖數是否正常。如果脈沖數不隨電動機運轉變化,則是編碼器回路故障;電動機不能正常運行,則為電動機過載故障。
1)編碼器測速回路故障處理 編碼器測速回路故障檢查與調試期間的故障檢查和處理基本相同,但是重點檢查接線松動和編碼器連接松動等方面的問題。
2)電動機過載檢查處理 電動機過程原因主要有制動器未打開、負載過大和機械傳動裝置卡滯等。檢查時首先判別所吊重物是否超出起重機的額定載荷,再觀察機構的制動器是否完全打開,如能完全打開則手動轉動高速軸,如不能轉動,則為機械傳動裝置卡滯。
造成制動器無法完全打開的原因較多,總體分機械和電控2個方面的原因。機械方面主要是制動架推桿卡滯、推動器電動機損壞、推動器液壓缸內油液油量不足和液壓缸內進氣等原因。電控方面主要檢查PLC控制器有無輸出、制動器控制線路接線,接觸器、繼電器線圈有無損壞、活動部位有無卡滯等。
傳動裝置的機械卡滯主要是軸承損壞引起,特別是高速軸上的軸承潤滑不良易導致軸承燒毀。因此,判斷為機械傳動裝置卡滯后,將電動機軸與傳動軸脫開,分別轉動兩側軸,確定是電動機軸卡滯還是減速器軸承卡滯。某廠房東廳起重機在使用中出現過因減速器高速軸軸承損壞引起的變頻器速度監視故障,導致減速器高速軸軸承損壞的原因是低溫情況下減速器油量不滿足使用要求。
4 結論
本文針對航天發射場起重機設備變頻器速度監視故障故障率較高,故障定位難的現狀,分析了變頻器速度監視故障機理和原因,制作了變頻器速度監視故障樹,并結合自身調試和故障處理經驗,制定了變頻器速度監視故障判斷流程。為航天發射場起重機設備變頻器故障快速定位和處理打下良好基礎,提高了發射場變頻起重應急處置能力。
猜你喜歡
防爆電機(2020年3期)2020-11-06 09:07:42
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年5期)2018-12-09 09:04:50
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
電子制作(2017年7期)2017-06-05 09:36:13
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車維修與保養(2015年6期)2015-04-17 03:31:50