基于圖像處理的目標活動分析方法
2023-03-29 05:34:04徐才進倪辰辰
航天電子對抗 2023年1期
高 飛,徐才進,梁 璟,倪辰辰,楊 玲
(中國電子科技集團公司第二十九研究所,四川 成都 610036)
0 引言
隨著現代戰場環境日益復雜以及戰場目標活動愈發頻繁,傳統目標情報中包括的基本屬性、信號參數等靜態信息已經難以滿足聯合作戰對支援情報的需求。基于歷史偵察數據的目標活動規律分析可以挖掘出重點目標的典型航路和頻繁活動區域,不僅能為聯合作戰指揮控制、作戰籌劃等業務提供戰場目標數據支撐,還能在戰場態勢感知中用于目標活動異常檢測和預警等。受益于戰場偵察能力的提升和情報信息系統能力的增強,戰場目標的歷史偵察數據在系統中持續積累,為目標活動分析提供了良好的條件。作為戰場情報分析的主要組成部分,目標活動分析依賴戰場偵察數據開展工作,傳統的目標活動分析方法[1]以偵察數據統計、挖掘為主,輔以人工標注等干預手段,雖然能得到較為完整準備的目標活動分析結論,但是存在挖掘算法設計困難、大數據計算耗時較長以及人工標注效率較低等問題。蓬勃發展的圖像處理技術為目標活動分析提供了新的技術思路,將偵察數據在地圖上進行圖像化,使用圖像處理方法進行目標活動分析,可以有效減少算法設計難度、提升數據分析效率并增強分析結論可視化水平。
本文創新性地將圖像處理方法引入目標活動規律分析。由于環境和裝備能力的影響,不同目標的歷史偵察數據情況有所不同,根據數據量的數據分布情況可以分為歷史稀疏航跡點和歷史密集航跡點2 種情況:對于稀疏航跡點通過偵察數據圖像化、二值化以及圖像濾波實現了目標活動航路提取;對于密集航跡點通過偵察數據熱度圖生成、圖像去噪、圖像增強實現了目標活動區域提取。最后,使用仿真數據驗證了將圖像處理技術引入目標活動分析的有效性。
1 稀疏航跡點目標活動航路分析
針對稀疏型航跡點數據,主要研究基于歷史稀疏型航跡點的航路分析,具體處理分析流程如圖1 所示。
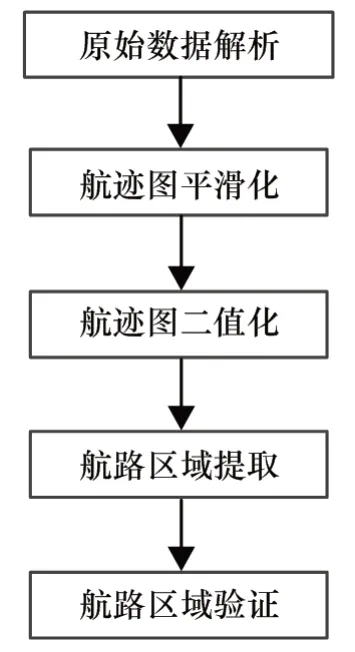
圖1 稀疏航跡點目標活動航路分析流程
1.1 原始數據解析與航跡圖平滑化
通過戰場情報偵察等手段獲取的目標位置信息主要是經緯度信息,在進行基于數字圖像處理的活動航路分析前,需要將這種地理坐標系統轉換為平面坐標系統,形成平面坐標航跡圖。考慮到偵察時的環境影響、裝備狀況和目標混疊等情況,原始偵察數據的經緯度信息中可能存在一定誤差和噪聲,可以采用數字圖像處理中平滑模糊濾波方法[2],使航跡圖像平滑模糊化并具有一定的容錯性。
圖像空間濾波器一般由一個鄰域和對鄰域所包圍圖像像素執行的預定義操作組成。對每個像素濾波器產生一個新像素,其坐標等于鄰域中心坐標,其像素值是濾波的響應結果。濾波器依次訪問輸入圖像中的每個像素后,就生成了濾波后的圖像。對圖像中的任意一點(x,y),其像素值為f(x,y),濾波器的響應g(x,y)是濾波器系數與由該濾波器所包圍的圖像像素的乘積之和。濾波器鄰域一般為奇數尺寸,最小為3×3。對大小為m×n的鄰域,設奇數m=2a+1,奇數n=2b+1,其中a、b為正整數。使用大小為m×n的濾波器對大小為M×N的圖像進行線性空間濾波,可表示為:
例如,對于3×3 鄰域的線性空間濾波器:
1.2 航跡圖二值化
進行目標活動航路分析時,圖像中只存在航路區域和非航路區域,是一個典型的二值化問題。圖像的二值化就是通過確定一個閾值,把灰度圖像的每個像素按其灰度值分為2 類,使得原圖像變為二值圖像,即灰度圖像的二值化[3]。
設灰度圖像P尺寸為m×n,經過上文濾波后處理的每一像素灰度值為x(i,j)。圖像像素灰度均值為:
設整數min、max,其中min 為最小灰度像素灰度值向下取整,max 為最大灰度像素灰度值向上取整。
設整數k∈[min,max],對圖像進行遍歷,得到圖像中灰度值近似為k的像素點個數Ak。遍歷開始時Ak=0,對任一像素點,若k-0.5≤x(i,j) <k+0.5,則Ak=Ak+1。遍歷后得到序列Amin,Amin+1,…,Amax,對數列A進行排序,由大到小得到新的序列B1,B2,…,Bm,與B1相對應的An的角標n即為圖像中像素出現頻率最高的灰度,由此可得到灰度分布中一個較大的峰值處的灰度值。通常圖像的灰度均值應在兩峰值之間,故可用下述方法確定另一峰值的位置,即按順序將B2,B3,…對應An'的角標n'代入式|n-n'|,當出現第一個滿足條件的n'時,認為該n'為另一波峰灰度值。所要取的閾值T應在n與n'之間 :
取得閾值后,對圖像進行二值化運算得到邊緣清晰的二值化圖像:
1.3 航路區域提取
提取出二值化后的航跡圖像后,研究采用數字圖像處理中的數學形態學濾波方法,分析提取出航路區域。數學形態學可以很好地對圖像中存在的一些空洞或斷點進行處理,得到更加本質的圖像形態,主要包括膨脹、腐蝕、細化、粗化、開運算和閉運算等。
膨脹是將目標區域的背景點合并到該目標物中,使目標物邊界向外部擴張的處理。選取結構元素B,將圖像X中的每一個像素點擴大為B+x,膨脹可以使圖像斷點連合,成為一個整體。
腐蝕是將目標區域的邊界收縮,直觀上就是使得目標區域變小,與膨脹是互為對偶的過程,但是并非經過2 種運算后圖像可以還原。選取結構元素B,將圖像中的X的B+x收縮為點x。腐蝕可以消除邊界處的干擾點。
另外,開運算和閉運算是為了解決膨脹和腐蝕運算改變圖像大小而提出來的。開運算是先腐蝕后膨脹的過程,可以消除圖像中細小噪聲,平滑物體邊界。閉運算是先膨脹后腐蝕的過程,可以消除圖像中存在的空洞,平滑物體邊界。
2 密集航跡點目標活動區域分析
針對密集型航跡點數據,主要研究基于歷史密集型航跡點的區域分析,具體處理分析流程如圖2 所示。

圖2 密集航跡點目標活動區域分析流程
2.1 原始數據解析與航跡點熱度圖生成
通過解析原始數據,將經緯度信息轉換為平面坐標系下的航跡圖,便于進行圖像處理。統計每個像素點區域目標出現的熱度(像素點位置出現一次航跡點,便將像素點灰度值加1 或者其他固定值),分析處理后,目標出現越頻繁的像素點區域灰度值越高,圖像對應區域就越高亮顯示。
2.2 航跡點熱度圖去噪
通過圖像學中值濾波去除熱度圖中的“非頻繁噪聲點”。中值濾波的基本原理是把數字圖像或數字序列中一點的值用該點的一個鄰域中各點的中值代替,從而消除孤立的噪聲點[4]。
設二維矩[xij]表示一副數字化的圖像(其中i、j表示各像素點的位置,xij表示各像素點的灰度值),W[xij] 表示對圖像[xij]中的點xij做窗口操作,Med{xij}表示對窗口W[xij]內的所有點取中值,若[yij]為圖像[xij]經過中值濾波后的輸出圖像,濾波窗口的大小為m×n(其中m、n為奇整數),那么:
2.3 航跡點熱度圖增強
在數字圖像處理中,直方圖均衡化(HE)是一種最常用的空域直方圖修正技術,其以概率理論為基礎,運用灰度點運算來實現對圖像直方圖的變換,從而達到增強圖像對比度的目的。HE 是把給定圖像的直方圖分布改造成均勻直方圖分布,使輸出像素灰度的概率密度均勻分布。基本原理是當圖像中所有的灰度級出現的概率是一個均勻分布時,圖像所暴露出來的信息量最大[5]。
空域圖像增強的基本方法是對圖像做灰度變換T:f(x,y)→g(x,y)。直方圖修正試圖尋找灰度變換函數T:它能把f(x,y)映射為g(x,y),使得g(x,y)的直方圖Pg(r)具有指定的形式qr,因此它不是事先指定變換函數,而是從Pf(r)及qr中計算得到T。任一圖像f(x,y)的直方圖Pf(r)在變換s=T(r)下具有以下形式:
式中,T(r)在區間[0,1]上是單調上升的單值函數,對于0 ≤r≤1,有0 ≤T(r)≤1。實際應用當中,處理的圖像都是數字圖像,因此需要離散化,HE 的離散化表達式為:
式中,NL、NS分別是圖像行數和列數,從而可以得到:

3 仿真驗證
基于上述目標活動航路和活動區域分析方法,構造對應的稀疏、密集仿真數據,驗證其理論算法和分析流程的有效性。
3.1 稀疏航跡點目標活動航路分析驗證
構建稀疏的仿真目標活動位置信息,形成原始的平面坐標點跡圖,如圖3 所示。

圖3 原始點跡圖
基于時間序列繪制其航路,中間缺失的航跡點采用直線連接表示,如圖4 所示。

圖4 原始航跡圖
采用高斯濾波進行原始航跡圖平滑化處理。根據航跡點在圖像上的成像分辨率大小,選擇一定半徑的高斯核對航跡圖像進行平濾波滑,針對仿真數據選擇的高斯核大小為5×5,濾波效果如圖5 所示。

圖5 航跡圖平滑模糊濾波效果
航跡圖平滑模糊濾波后,進行圖像二值化處理,便于進行航路區域分析提取,試驗效果如圖6 所示。

圖6 航跡模糊圖像二值化
在二值化航跡圖像的基礎上,對二值化圖像重復進行3×3 或5×5 等區域大小的圖像學膨脹與腐蝕處理,重復進行2 至3 次,試驗效果如圖7 所示。
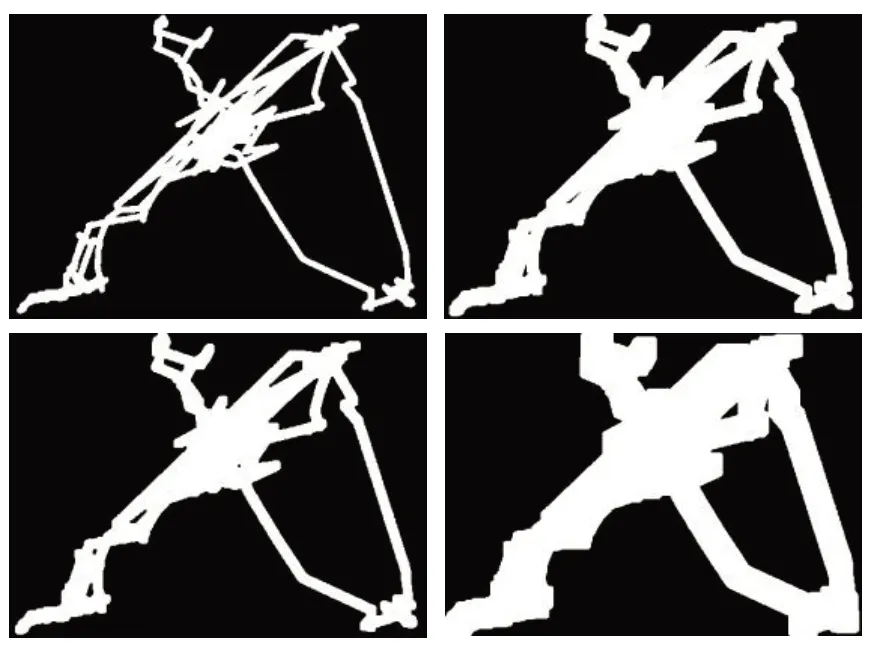
圖7 航路區域提取效果
為驗證航路分析提取效果,將其與原始航跡數據疊加進行驗證,試驗效果如圖8 所示。
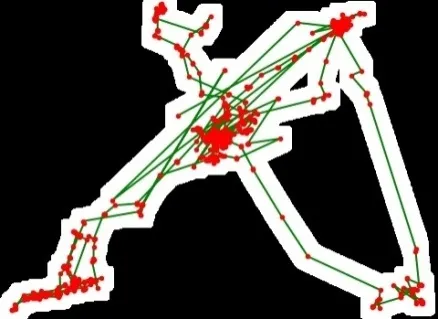
圖8 航跡點航路驗證
3.2 密集航跡點目標活動區域分集驗證
構建密集的仿真目標活動位置信息,并將地球經緯度轉換為平面像素坐標系下的絕對坐標值,形成如圖9 所示的原始航跡點圖像。

圖9 原始航跡點圖
在原始航跡點數據基礎上,通過灰度圖亮度值累加,生成航跡點熱度圖效果,如圖10 所示。
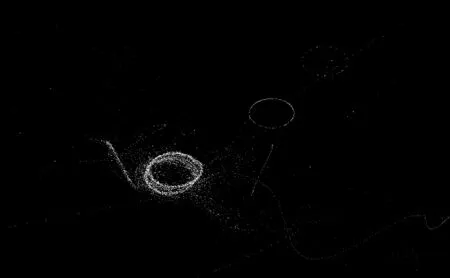
圖10 航跡熱度圖
在航跡點熱度圖基礎上,利用圖像中值濾波原理,去除非頻繁活動航跡點,從而實現航跡點熱度圖去噪,效果如圖11 所示。

圖11 航跡熱度圖中值濾波效果
在通過中值濾波實現航跡熱度圖去噪后,采用直方圖均衡化方法,拉升圖像對比度,實現圖像增強,將航跡熱度圖顯性化,效果如圖12 所示。

圖12 航跡熱度圖增強效果
在航跡熱度圖增強效果基礎上,進行圖像二值化處理、圖像濾波,實現航跡熱度圖區域的擴張和活動區域顯性化,效果如圖13 所示。
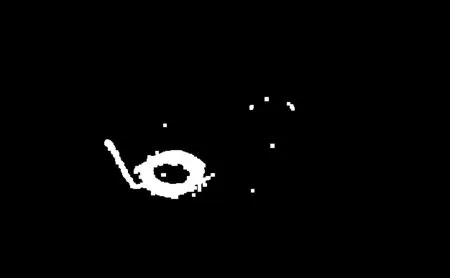
圖13 航跡熱度圖頻繁活動區域效果
將提取的頻繁活動區域與原始數據進行疊加驗證,可以看出頻繁活動區域呈現出一些特定形狀區域、直線區域或點狀區域等,如圖14 所示。

圖14 頻繁活動區域效果驗證
將通過仿真數據提取到的活動航路、區域結果與原始航跡點進行疊加驗證,可以看出該方法得到的結論能有效地描述不同數據分布情況下的目標典型航路和區域信息,結果邊界光滑且對比顯示清晰。
4 結束語
本文將數字圖像處理的相關方法引入目標活動分析,對于稀疏航跡點通過航跡平滑化、二值化以及形態濾波實現了目標活動航路提取,對于密集航跡點通過熱度圖生成、去噪、增強、濾波實現了目標活動區域提取。并通過仿真數據驗證了方法的有效性。相對于傳統的基于統計和人工標注的方法,本文提出的方法能有效消除數據噪聲和非頻繁活動點的影響,通過形態學濾波消除由于偵察數據缺失導致的邊界不平滑問題,并實現提取結果的增強顯示。后續可以基于本文的活動分析結果,同樣利用圖像處理的方法判斷目標當前是否在典型活動航路或區域內,判斷其是否異常活動。■
猜你喜歡
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
今日農業(2021年9期)2021-11-26 07:41:24
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
快樂語文(2020年30期)2021-01-14 01:05:38
海峽姐妹(2018年3期)2018-05-09 08:20:40
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
