145m 長小半徑曲線鋼箱梁頂推施工關鍵技術
2023-03-30 06:21:56邢東東XINGDongdong
價值工程 2023年8期
邢東東 XING Dong-dong
(中鐵十五局集團第二工程有限公司,上海 201714)
1 工程概況
安慈高速ZK0+927.5 主線橋的31#-32#墩是跨越長張高速通向慈利縣的匝道,32#-33#跨越長張高速,且兩條道路車流量均較大。該主橋設計采用(40+65+40)m 單箱雙室等截面鋼箱梁,鋼箱梁沿路線設計線全長145m,且位于主要半徑為280m 左右的圓曲線和少量緩和曲線上,整體呈圓弧形。箱梁在高程上處于-2%的縱坡上,高程下降高度最大達到1.816m。鋼箱梁采用厚度16-20mm 鋼板,支點位置加厚并設支撐加強肋,梁高2.5m,底板寬7.83m,橋面板寬12.75m,腹板按鉛錘直腹形式,鋼箱梁總重量約為965.30 噸,總體較重。
2 施工總體方案概述
本橋鋼箱梁具有噸位大、長度長且位于小半徑空間曲線梁的特點,施工受外部交通影響大,無法進行吊裝施工,結合施工設計和運輸條件,采用步履式頂推架梁的施工方式。本橋鋼箱梁分成13 個節段,每個節段由單元構件組成,由專業的鋼結構廠家進行定制生產,生產板單元構件后,運輸至位于施工現場的拼裝場地上,拼裝成鋼箱梁的節段。依托已布置的頂推支架,安裝頂推裝置系統,然后用汽車吊吊鋼箱梁節段裝至組拼支架上拼裝,再安裝導梁、依次頂推,直至完成頂推的所有過程,最后完成涂裝等作業后,將鋼箱梁體落架在永久支座上,拆除頂推裝置和臨時支架。

圖1 頂推施工工藝流程圖
3 導梁、臨時支墩及拼接平臺
3.1 導梁的設計
鋼箱梁前端設置導梁,導梁的長度取梁跨的0.6-0.8倍,剛度宜選主梁剛度的1/9~1/15。本導梁全長28m,寬7.75m,由兩片工字型梁構成,中間由?219×6 鋼管焊接而成的5 片橫連件連接主梁,工字梁的最大截面為2.4m,最小截面1.2m。由厚20mm、厚16mm 和厚14mm 鋼板呈工字型焊接而成。導梁前端底部1m 范圍內做成圓弧形過渡,抵消大懸臂狀態的撓度,使梁順利上墩。鋼導梁縱梁與鋼箱梁兩側箱室中心同高,采用熔透對接焊連接,導梁與鋼梁對接縫處采用大型馬板連接,以增加連接強度,如圖2 所示。

圖2 頂推導梁結構設計圖
3.2 鋼箱梁的臨時支墩的設計
鋼箱梁的臨時支墩在頂推施工過程中起到臨時過渡承載和臨時拼裝平臺的作用。本聯鋼箱梁頂推施工中在在31#-34#墩中間設置5 個頂推臨時支架,作為頂推臨時支架,每支架上設2 個頂推裝置,支架上設置通長滑道梁。另在在34#墩側設置一個臨時鋼管支架作為鋼梁節段的臨時組拼支架,為吊裝的鋼梁節段在橋上組拼提供穩定的作業環境。
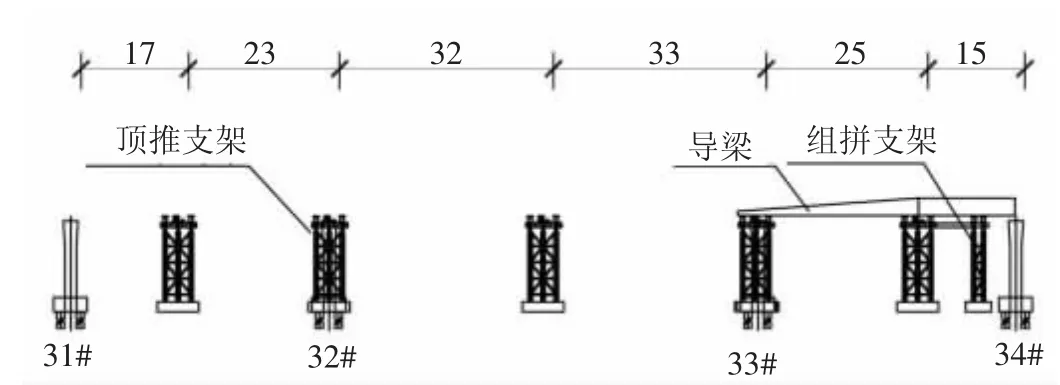
圖3 鋼箱梁的臨時支墩立面布置圖
臨時支架(墩)依托樁基承臺或者C30 擴大基礎。每個臨時支墩采用順橋3 排,橫橋向3 排?630×14 螺旋鋼管,剪刀撐用?219×8 鋼管焊接而成,柱頂焊接雙拼HN650×300 型鋼作為橫梁,長度12m。另依托頂推臨時支墩焊制外延工作平臺,作為高壓油泵控制平臺,便于放置高壓油泵和操作。
同時,在鋼箱梁的預拼裝區設立1 個組拼臨時支架,結構同頂推支架,利用33#-34#墩進行鋼箱梁拼裝焊接,在分節處設有臨時焊接平臺。
4 鋼箱梁頂推裝置的配置
4.1 鋼箱梁頂推裝置的選型
由于本橋位于半徑R=280m 的圓曲線和A=200 緩和曲線上,且位于2%的縱坡上,拖拉式的頂推施工無法滿足施工的要求,結合當前的施工條件,選擇步履式多點連續頂推施工工藝,該方法滿足曲線梁移動軌跡的需要,又可以利用其自身為自平衡頂推系統,減少對墩臺的水平力的作用。本項目選定10 個ZBD-100 型步履式頂推裝置,每2個組成1 組。每個頂推裝置由100t 水平千斤頂組、100t 豎直千斤頂組及糾偏裝置等組成的自平衡設備系統。該頂推設備具備橫向調整技術,可以處理曲線梁頂推過程中滑動軌跡的糾偏,確保曲線梁的平面位置準確。
4.2 鋼箱梁頂推裝置的驗算
本聯的鋼箱梁大部分位于半徑R=280m 的圓曲線上。按照將鋼箱梁看作為一小段圓弧,在頂推裝置的作用力下,鋼箱梁弧段繞圓心做圓周運動并沿圓弧曲線前進的過程,將多個頂推裝置的縱向頂推方向與線路的切法方向一致進行布置。因此可以認為總的頂推力等于所有頂推裝置的推力的和,同時大于頂推過程中它受到的摩擦力(考慮靜摩擦力),也即:
鋼梁自重G=9650kN,鋼梁最大懸臂33m,滑道摩擦系數μ 取值0.1,安全系數K 取2,縱坡i 為2%。則頂推裝置受到的最大摩擦力為2×9650×(0.1+0.02)=2316kN。現場中布置的10 臺型號相同頂推裝置,該型號的頂推裝置頂升、頂推的力均為1000kN。頂升力、頂推力均滿足結構的受力要求,并且頂推力儲備為摩擦力的4.3 倍,完全滿足施工的需要。
4.3 步履式頂推裝置單元的安裝
本項目選定10 個ZBD-100 型步履式頂推裝置組成5組,每組2 個頂推單元。每個頂推單元由頂推裝置、滑道梁和支撐墩等組成,固定落放在頂推支架上。
滑道梁落在雙拼工字鋼形成的橫梁上,滑道梁采用雙拼HN650×300 型鋼,全段采用10mm 鋼板做成橫肋加強,加密加強受力部位。如圖4 所示,在滑道梁上布置頂推裝置,兩側布置支撐墩,與滑道梁固定。全橋5 個頂推支架,共計布置頂推裝置10 個,每個頂推支架布置工作平臺1個,放置油泵設備,每墩共計2 臺油泵,其中一臺油泵控制豎向千斤頂,一臺油泵控制水平頂推千斤頂。支撐墩采用?630×14 螺旋鋼管支撐,底部和頂部均采用鋼板加強,并且與滑道梁進行臨時固結,配置鋼板用于調節高差使用,上安放50mm 厚橡膠墊用于防爬行。

圖4 頂推裝置縱向布置示意圖
每個頂推單元由1 個頂推油缸和2 個頂升油缸組成。該頂推單位向上頂推力為100 噸,水平頂推力為100 噸。步履式頂推設備利用“頂”“推”“降”“縮”的四個步驟交替進行,啟動液壓泵站,先用豎直千斤頂將鋼箱梁整體頂起,然后用水平千斤頂向前推送一個行程;接著豎直千斤頂回落下降,鋼箱梁完全放置在支撐墩上,水平千斤頂油缸回縮到底;通過往復頂推步驟,最終將鋼箱梁頂推到預定的位置。
5 頂推施工設計的受力分析
為保證頂推施工順利完成,采用有限元軟件對頂推過程進行了施工模擬,進行了三維空間結構分析。首先對頂推支架(墩)、拼裝支架進行驗算,支架體系的剛度、強度均滿足施工的要求。由于此橋為彎橋,且臨時支架與主梁軸線方向有一定夾角,為準確模擬其空間受力情況,因此使用空間梁格模型法對頂推過程進行模擬計算。模型共分為527 個單元,810 個節點,為準確模擬頂推施工過程中鋼箱梁、鋼導梁等相關受力及變形情況,細分為71 個施工階段。

圖5 鋼箱梁頂推施工過程仿真模擬模型
經過仿真模擬計算分析,計算得出鋼箱梁在頂推過程中受到的最大應力、撓度和導梁的設計符合規范要求,頂推過程的材料性能、整體抗傾覆能力滿足要求。
6 鋼箱梁的頂推施工及控制
6.1 鋼箱梁的頂推同步協調控制技術
由于本聯鋼箱梁位于曲線上,設計頂推力方向沿曲線切線方向布置而無法取得一致的方向。同時每個頂推裝置受到的摩擦力也有偏差。因此鋼箱梁在頂推過程中盡可能地減少頂推設備之間的損耗,確保頂推同步推力的協調控制是施工的關鍵。
本聯鋼箱梁采用的步履式頂推裝置包括多個頂推裝置、多個液壓泵站及1 套控制系統組成,其中。步履式頂推控制系統是一種具備實時感知、數據傳輸、遠程控制操作,通過可編程邏輯控制器控制技術的多功能控制裝置。當頂升千斤活塞伸出將主梁頂起后,頂推千斤活塞伸出將梁頂推前移,此過程需進行位移同步控制、壓力均衡控制、橫向調節控制。主控制臺除了控制所有支撐架上頂推千斤頂的統一動作之外,還必須保證所有頂推千斤頂每行程的同步。
在實際操作中,同一頂推支架上的水平頂推千斤頂中以其中一臺頂為主動點(這也是要儲備較高的頂推力的原因之一),以一定速度伸缸,其余水平頂為隨動點并與其比較,每臺頂與其的位移量差控制在設定值以內,若某臺頂伸缸較快,則減小相應的比例閥的流量,反之,則增大相應比例閥的流量。在不同支撐架上水平頂推千斤頂的同步控制以某一支撐架上的其中一臺頂為主動點,其余支撐架的同一軸線上的頂與之比較,若某臺頂伸缸較快,則減小相應的比例閥的流量,反之,則增大相應比例閥的流量,從而實現所有水平頂推頂的同步。此過程同步精度各支撐架之間可控制在5mm 之內,同支撐架兩側可控制在1mm 之內。頂推千斤頂縮缸則無需同步控制。
6.2 鋼箱梁的頂推線形控制技術
在鋼箱梁頂推過程中,限于梁自身為曲線梁和多點頂推等因素的影響,在頂推施工過程中嚴格控制鋼箱梁的軸線位置,確保其始終處于設計中線范圍內,確保頂推為梁體沿圓弧曲線前進。
首先,鋼箱梁的拼裝施工應確保準確無誤,嚴格按照設計的要求完成鋼箱梁的拼接,確保施工過程中在鋼箱梁上控制的基點無誤。同時頂推的速度要均勻,不可過快,及時對梁體內部的受力情況進行檢測、分析梁體在頂推過程中頂、落的過程中彎矩的變化帶來的形變影響。
其次,對于頂推過程中超出規范要求的偏差的情況,必須采取橫向糾偏措施。糾偏一定要在頂推過程中進行,不得在靜止中進行。本頂推裝置具有橫向位移糾偏功能,若需要側向調整,則啟動側移液壓缸,側推頂推塊,將鋼箱梁的水平位置調整到允許范圍內,實現糾偏功能。
第三,若施工過程中出現位移過大、千斤頂受力突變或者差值較大,出現箱梁爬行和脫空等現象,應立即控制現場的情況,暫停頂推施工,查找現場的原因,分析對策。
7 結束語
安慈高速ZK0+927.5 匝道橋跨線橋頂推施工歷時1個月順利完成。頂推過程中臨時支架位移未超限,前導梁未見異常,頂推就位精度滿足設計要求,未使用備用糾偏措施。頂推就位后各項技術指標及梁體應力均符合設計及規范要求。
①本項目臨時支架的地基礎處理剛性較好,有力的確保了施工支架變形較小,為頂推施工提供了穩定的環境。
②頂推梁的運行軌跡與設計平曲線一致,通過對頂推裝置協調控制技術,加強對頂推過程的監控和測量,通過一系列糾偏技術的運用,確保了梁體就位精度,線性控制較好。
③對頂推過程中的梁體的位移超限、頂推同步性差、梁體脫空、爬移等進行針對性的預控,確保施工過程中順利實施。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20