基于無人機傾斜攝影測繪技術(shù)的農(nóng)村不動產(chǎn)權(quán)籍測量
2023-03-30 06:23:12楊學(xué)武YANGXuewu
價值工程 2023年8期
楊學(xué)武 YANG Xue-wu
(赤峰市不動產(chǎn)登記中心,赤峰 024000)
0 引言
長期以來,采用傳統(tǒng)的全野外數(shù)字測圖模式進行農(nóng)村不動產(chǎn)權(quán)籍調(diào)查和測繪工作,存在成本較高、工序繁瑣、效率低下等問題。隨著科學(xué)技術(shù)的飛速發(fā)展,越來越多的測繪新技術(shù)開始涌現(xiàn)并被廣泛應(yīng)用于測繪各行業(yè)。無人機傾斜攝影測量技術(shù)是近幾年發(fā)展起來的新技術(shù),能夠真實、全面反映房屋、道路的界址和面積等信息,具有高精度、高效率、操作自動化等特點,在不動產(chǎn)測繪領(lǐng)域有著較好的前景。該技術(shù)的應(yīng)用是解決各種土地糾紛、推進不動產(chǎn)權(quán)籍測量工作優(yōu)化的有效途徑。對此,本文研究了無人機傾斜攝影測繪技術(shù)在某農(nóng)村不動產(chǎn)權(quán)籍測量中的優(yōu)勢、測量技術(shù)流程、內(nèi)外業(yè)數(shù)據(jù)處理技術(shù)等,并將該技術(shù)與常規(guī)權(quán)籍測量方法和三維激光掃描方法在精度、效率、難度等方面進行綜合對比,以期為不動產(chǎn)權(quán)籍測量提供更多更靈活的選擇。
1 無人機傾斜攝影測繪技術(shù)原理與應(yīng)用優(yōu)勢
1.1 測量原理與關(guān)鍵技術(shù)
無人機傾斜攝影測量技術(shù)是集無人機技術(shù)、傳統(tǒng)航空攝影技術(shù)、GPS 差分技術(shù)等多種技術(shù)于一體的新型測繪技術(shù),其技術(shù)原理為在一個無人機平臺上搭載多個傳感器,從垂直、傾斜等多角度獲取地物的空間信息,配合GPS 和POS 定位定向技術(shù)記錄拍攝點的位置信息,運用數(shù)據(jù)處理軟件構(gòu)建三維模型,最終生成數(shù)字線劃圖(DLG),獲取地面物體更加完整、精準的信息。無人機傾斜攝影測量技術(shù)的發(fā)展不僅擴大了該技術(shù)在測繪各領(lǐng)域的應(yīng)用范圍,也推動了測繪行業(yè)的進步。在農(nóng)村不動產(chǎn)權(quán)籍具體的測繪作業(yè)中,傾斜攝影測量的關(guān)鍵技術(shù)包括航攝規(guī)劃、像控點布設(shè)、空三加密等技術(shù)。一般無人機飛行測量前,需要結(jié)合攝區(qū)地形情況、宅基地格局、房屋結(jié)構(gòu)等因素設(shè)計合理的相機參數(shù)、航線規(guī)劃和飛行速度等。合理的航攝規(guī)劃是測繪影像有著較高質(zhì)量的保障,也是減少補測和返工的主要途徑。根據(jù)規(guī)劃的航線長度、測區(qū)面積等選擇合理的像控點個數(shù),通常像控點會均勻分散在測區(qū)的中心和四角位置。空三是空中三角測量的簡稱,空三加密技術(shù)是以像片上量測的像點坐標為依據(jù),采用相關(guān)算法,根據(jù)少量的野外控制點,在計算機上解求出所攝地區(qū)未知點的高程和地面坐標。空三加密技術(shù)是決定傾斜攝影測量最終成果質(zhì)量的重要因素[1-2]。
1.2 技術(shù)應(yīng)用優(yōu)勢
無人機傾斜攝影技術(shù)在智慧城市、智慧旅游、農(nóng)村不動產(chǎn)權(quán)籍測量以及違章建筑監(jiān)測中應(yīng)用廣泛,基于該技術(shù)獲得的實景模型能夠為各領(lǐng)域提供大范圍真實的地理環(huán)境、豐富全面的建筑物信息。將無人機傾斜攝影技術(shù)應(yīng)用于農(nóng)村不動產(chǎn)權(quán)籍測量中可發(fā)揮其全方位數(shù)據(jù)采集、高效率、高精度、操作自動化等多項優(yōu)勢。從垂直、前、后、左、右五個角度進行數(shù)據(jù)采集能全方位獲取地物空間信息;快速的業(yè)外數(shù)據(jù)采集、自動建模與數(shù)據(jù)處理大大縮減了測繪時間,節(jié)約了人力,將大量的外業(yè)工作轉(zhuǎn)移到業(yè)內(nèi),降低了業(yè)外勞動強度,同時也能夠減少測繪工作受天氣因素的影響;傾斜攝影測量的分辨率已經(jīng)達到2cm,可較好滿足農(nóng)村不動產(chǎn)權(quán)籍測量作業(yè)的數(shù)據(jù)精度要求;該測量方式獲取的三維數(shù)據(jù)帶有空間位置信息,能夠同時輸出數(shù)字表面模型、數(shù)字線劃圖和數(shù)字高程模型等數(shù)字成果,且數(shù)據(jù)成果有著較高的應(yīng)用價值,可繼續(xù)應(yīng)用于規(guī)劃、管理領(lǐng)域。
2 農(nóng)村不動產(chǎn)權(quán)籍測量
隨著傾斜攝影測繪技術(shù)的快速發(fā)展,其在農(nóng)村不動產(chǎn)權(quán)籍測量中的應(yīng)用前景更加廣闊,為進一步驗證該技術(shù)相比于其他技術(shù)在工作效率、數(shù)據(jù)精度、技術(shù)難度等方面的優(yōu)勢,采用該方法與常規(guī)不動產(chǎn)權(quán)籍測量方法、三維激光掃描測量方法對某農(nóng)村進行不動產(chǎn)權(quán)籍測量對比。該調(diào)查區(qū)的地勢不平、宅基地格局不規(guī)則,區(qū)域內(nèi)老房較多且房屋結(jié)構(gòu)不規(guī)則,宗地界址、房屋實際面積的確定存在一定難度[3]。
2.1 常規(guī)權(quán)籍測量方法
全站儀測量是一種常見的外業(yè)數(shù)據(jù)采集方法,將其應(yīng)用于該試驗農(nóng)村不動產(chǎn)權(quán)籍的測量,具備流程簡單、設(shè)備成本低、測量方法多等優(yōu)勢,但單獨使用全站儀進行測量需要大量人力物力,且受天氣變化、農(nóng)村地區(qū)樹木遮擋等影響較大。對此,將其和GPS-RTK 測量方法組合應(yīng)用,彌補各自缺陷,減小測量誤差。
在該試驗農(nóng)村不動產(chǎn)測量中,先進行GPS 首級控制網(wǎng)的布設(shè),在目標明顯、點位位置較高、無遮擋的位置埋設(shè)控制點,構(gòu)建平面控制網(wǎng)圖。根據(jù)GPS 接收機選用要求,采用三臺雙頻GPS 接收機進行觀測。GPS 控制測量工作模式為載波相位靜態(tài)相對定位模式。經(jīng)初步檢查后開機,記錄開機時間、測站編號以及天氣情況,在接收機旁不使用其他電子設(shè)備以免影響測量精度。D、E 級GPS 控制網(wǎng)靜態(tài)測量技術(shù)要求如表1 所示。
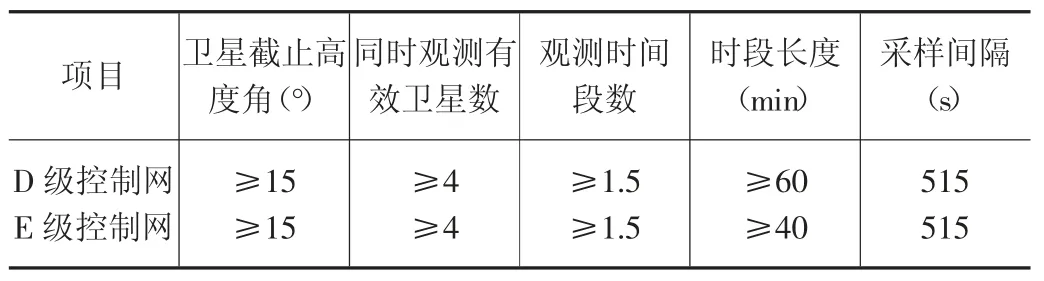
表1 GPS 控制網(wǎng)靜態(tài)測量技術(shù)要求
采用數(shù)據(jù)處理軟件進行基線解算,經(jīng)過基線向量計算,檢核,進行三維無約束平差,評定控制網(wǎng)精度。對于該農(nóng)村不動產(chǎn)首級控制測量觀測文件有14 個,站點數(shù)9 個,基線24 條。在此基礎(chǔ)上布設(shè)二級圖根控制點,根據(jù)該農(nóng)村不動產(chǎn)密集程度和通視條件布設(shè)15 個圖根點。運用動態(tài)RTK 測量圖根控制點,可保障控制點的精度均勻,獲得15個控制點的三維坐標。從其中選出5 條邊,檢測邊長的距離,發(fā)現(xiàn)邊長的核驗誤差小于1/3000。之后進行界址測量,為該農(nóng)村不動產(chǎn)地籍圖繪制提供位置信息。使用全站儀結(jié)合動態(tài)RTK 進行界址測量,觀測到95 塊宗地,135 個房屋界址點。同時觀測了區(qū)域范圍內(nèi)的房屋、圍墻、道路等地物要素,運用Cass9.1 成圖軟件繪制該試驗農(nóng)村的地籍圖,運用坐標法可測得宗地面積[4]。
2.2 無人機傾斜攝影測量方法
2.2.1 工作流程
無人機傾斜攝影測量工作包括前期準備工作、像控點布測、影像采集、數(shù)據(jù)檢查整理和導(dǎo)入、空三加密處理、制作數(shù)字線劃圖(DLG)等,其基體的工作流程圖如圖1 所示。
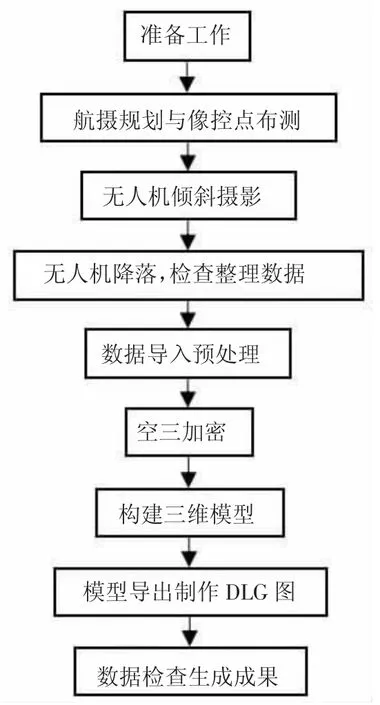
圖1 無人機傾斜攝影測量技術(shù)流程圖
2.2.2 外業(yè)數(shù)據(jù)采集
本次試驗采用“六旋翼無人機AC1500”平臺,該無人機系統(tǒng)的成本低、可靠性高、體積不大、操作使用簡單,且定位精度與影像分辨率也較高。六旋翼無人機AC1500 的技術(shù)參數(shù)如表2 所示。

表2 無人機技術(shù)參數(shù)
搭載的傾斜攝影相機為AP2300,其影像像元大小4.88um,焦距24mm,地面分辨率為0.02m。根據(jù)這些數(shù)據(jù)可計算無人機飛行時相對于基準面的垂直距離,將該試驗無人機的航高設(shè)為150m。為保障后續(xù)的影像匹配和三維模型的良好構(gòu)建,確定航向重疊度和旁向重疊度均為75%。根據(jù)測區(qū)0.12 平方公里的總面積,設(shè)定四條航線,航線間距55.3m 左右,拍攝間距35m。在該區(qū)域設(shè)定12 個像控點,像控點立體、均勻分布在測區(qū)內(nèi)。采用動態(tài)GPS-RTK 測量技術(shù)進行像控點測量。在測區(qū)內(nèi)選擇寬闊平坦的地方組裝無人機,在地面遙控控制板上輸入航攝規(guī)劃和攝影任務(wù),進行航空傾斜攝影。無人機在該測區(qū)的航攝飛行過程中,航線總長達4 公里,采集的影像總數(shù)為99 張,飛行時間總共0.2 小時[5-6]。
2.2.3 內(nèi)業(yè)數(shù)據(jù)處理
在業(yè)外獲取該測區(qū)影像信息的基礎(chǔ)上,進行業(yè)內(nèi)影像處理以快速構(gòu)建測區(qū)的三維立體模型。 采用ContextCapture 軟件進行業(yè)內(nèi)的數(shù)據(jù)處理與建模,數(shù)據(jù)處理的具體流程為:首先進行數(shù)據(jù)預(yù)處理,檢查采集數(shù)據(jù)的完整性與可靠性,刪除廢片,對多種數(shù)據(jù)進行聯(lián)合差分解算獲取高精度POS 數(shù)據(jù)。采用ContextCapture 軟件創(chuàng)建工程,下一步將全部照片和POS 數(shù)據(jù)導(dǎo)入,同時輸入相機的參數(shù)信息,自動進行影像匹配,將野外布設(shè)的像控點和影像進行關(guān)聯(lián),進行空中三角測量生成空三報告[7]。軟件自動完成該農(nóng)村區(qū)域三維模型的構(gòu)建,生成該試驗農(nóng)村區(qū)域75 塊宗地實景三維模型[8]。該農(nóng)村部分區(qū)域三維真實模型如圖2 所示。

圖2 三維真實模型
利用EPS 三維測圖軟件制作該試驗農(nóng)村1:500 DLG圖。采集居民地及圍墻、交通及附屬設(shè)施、管線及附屬設(shè)施、植被等地物要素和地貌要素,繪制標準房屋、道路和其他地物要素,輸出DLG 圖。
2.3 三維激光掃描測量方法
三維激光掃描技術(shù)是一項定位精度高、自動化程度高、數(shù)據(jù)采集快的新興技術(shù),通過掃描物體采集大量的三維點,可快速處理點云數(shù)據(jù)并構(gòu)建出目標物體的三維立體模型,給出各種幾何數(shù)據(jù)。將該技術(shù)應(yīng)用于農(nóng)村不動產(chǎn)權(quán)籍的調(diào)查能夠在短時間內(nèi)完成大量的測量任務(wù),極大地提升了作業(yè)效率,且該技術(shù)定位方式多樣,可較好保障采集數(shù)據(jù)的精度。但相比與前兩種測量方法,三維激光掃描系統(tǒng)的硬件和軟件設(shè)備價格都較為高昂,測量過程中設(shè)施的損傷會造成巨大經(jīng)濟損失。該技術(shù)的細節(jié)復(fù)雜,作業(yè)難度較高,需要專業(yè)的測量人員。
采用移動背包掃描儀對該農(nóng)村不動產(chǎn)權(quán)籍進行測量,先進行準備工作,對于該試驗農(nóng)村進行掃描軌跡的規(guī)劃,基準站的設(shè)置。然后按照規(guī)劃路線對巷子、院子、房屋等采集點云數(shù)據(jù),最后掃描路線閉合完成采集任務(wù)。將獲取的外業(yè)數(shù)據(jù)包括POS 數(shù)據(jù)、點云數(shù)據(jù)和GPS 數(shù)據(jù)進行處理。采用軌跡解算軟件,解算出移動背包的POS 數(shù)據(jù),消除誤差,進行統(tǒng)計分析生產(chǎn)有位置的點云數(shù)據(jù)。運用自動預(yù)處理軟件自動進行時間匹配,消除重疊數(shù)據(jù)之間的誤差。融合多種數(shù)據(jù)生成點云數(shù)據(jù),再與影像數(shù)據(jù)融合得到真實的三維點云數(shù)據(jù),從中提取不動產(chǎn)要素,繪制出該農(nóng)村的宗地圖、房屋分布圖等[9]。
3 試驗結(jié)果分析
基于以上三種方法進行該農(nóng)村不動產(chǎn)權(quán)籍測量的對比分析,明確該測繪新技術(shù)的應(yīng)用優(yōu)勢。
3.1 精度分析
界址點精度對比參考值為0.05m,界址線邊長精度對比參考值為0.1m。以常規(guī)權(quán)籍測量成果為參考,為其他兩種方法進行精度對比。將無人機傾斜攝影方法和常規(guī)方法進行對比,在上述獲取的數(shù)據(jù)成果中選取820 個界址點進行中誤差對比,發(fā)現(xiàn)無人機傾斜攝影測量界址點數(shù)據(jù)精度中誤差集中在0.05 以下,對比可知約有77%符合界址點中誤差。三維激光掃描測量方法與常規(guī)方法獲取的界址點比對,符合精度規(guī)范的界址點約占88%。
在無人機傾斜攝影所得DLG 圖中選取243 條房屋界址線邊長與常規(guī)方法所得邊長數(shù)據(jù)對比計算偏差,發(fā)現(xiàn)70%左右的界址線誤偏差小于0.05m,三維激光掃描方法獲取的邊長偏差也集中在0.05m 左右,這兩種方法均可滿足農(nóng)村不動產(chǎn)權(quán)籍測量精度要求。
3.2 效率分析
在該農(nóng)村0.12 平方公里共75 塊宗地的權(quán)籍測量中,常規(guī)測量方法和無人機傾斜攝影測繪新方法的作業(yè)時間分配表如表3 所示。
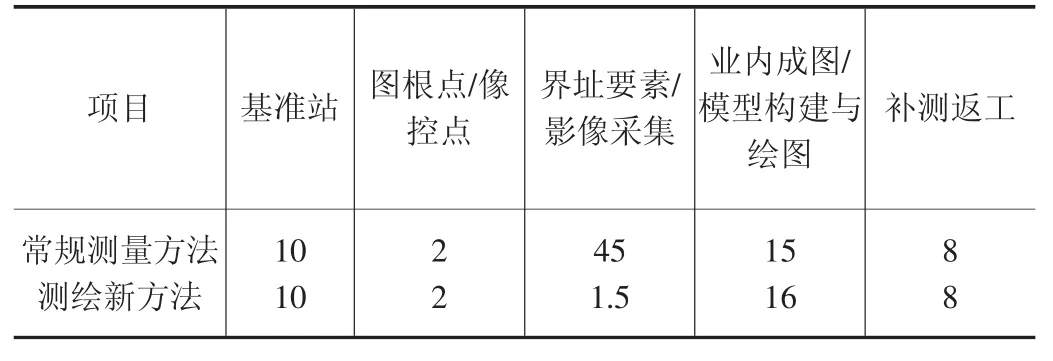
表3 不同測量方法下作業(yè)時間分配表 單位:h
可見,無人機傾斜攝影測量技術(shù)在外業(yè)數(shù)據(jù)采集方面比常規(guī)測量模式快十幾倍。這兩種方法在其他方面所需時間相差無幾。從整體上來看,無人機傾斜攝影測量技術(shù)使得農(nóng)村不動產(chǎn)權(quán)籍測量時間顯著縮減,提高作用效率約56%,充分展現(xiàn)了其快速、高效的測量優(yōu)勢。
在經(jīng)濟效率的對比中,一套常規(guī)測量系統(tǒng)軟硬件成本在幾千幾萬元,無人機傾斜攝影測量系統(tǒng)成本在幾萬幾十萬,而三維激光掃描系統(tǒng)成本為兩三百萬。技術(shù)難度的對比中,常規(guī)測量方法最簡單,無人機傾斜攝影測量方法復(fù)雜度高,第三種方法復(fù)雜度較高,作業(yè)流程也較復(fù)雜。因此,綜合來看,效率高、使用方便、成本適中的無人機傾斜攝影測量技術(shù)是該農(nóng)村區(qū)域最為適宜的不動產(chǎn)權(quán)籍測量技術(shù)[10]。
4 結(jié)語
無人機傾斜攝影測量技術(shù)有著靈活、操作簡單、成本低、分辨率高等優(yōu)勢,該技術(shù)非常適合范圍廣、面小、分散的農(nóng)村不動產(chǎn)權(quán)籍調(diào)查與測量。經(jīng)本文在應(yīng)用優(yōu)勢、技術(shù)流程、內(nèi)外業(yè)數(shù)據(jù)處理關(guān)鍵技術(shù)和試驗對比等方面的研究,證實了該技術(shù)可提高農(nóng)村不動產(chǎn)權(quán)籍測量精度、生產(chǎn)效率以及經(jīng)濟效益。無人機傾斜攝影測量技術(shù)今后將在農(nóng)村不動產(chǎn)權(quán)籍測量和管理中發(fā)揮更大的作用。
猜你喜歡
今日農(nóng)業(yè)(2022年1期)2022-11-16 21:20:05
今日農(nóng)業(yè)(2021年21期)2022-01-12 06:32:04
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21