風力助航船的風速監測技術
2023-05-10 04:46:52郭亞娜孫曉鋒
艦船科學技術 2023年7期
郭亞娜,孫曉鋒,2
(1.江蘇海事職業技術學院水上智能交通與海事服務研究所,江蘇南京 211170;2.長江南京航道工程局,江蘇南京 210011)
0 引言
船舶生產制造、海上航運等細分工業領域具有高污染、高能耗的特點,針對船舶工業領域的新能源開發也成為一項行業內的研究熱點[1]。
海上蘊藏豐富的風能、太陽能等可再生能源,而這些可再生能源的利用卻非常低,具有非常廣闊的應用潛力。目前,基于光能和風能的新能源技術不斷發展,風力助航船是一種利用風能進行船舶動力助航的船舶種類,相對于傳統柴油動力船舶,風力助航船利用海上豐富的風能資源,可以提高船舶動力系統的能源利用率,降低船舶成本。
本文針對風力助航船的風速監測技術進行深入研究,建立一種基于超聲波風速傳感器的風速監測平臺,詳細闡述了風速監測平臺的構成和工作原理。
1 風速監測技術的研究與發展現狀
風向、風速監測技術經歷了較長時間的發展,在各個領域都有重要的應用,尤其是氣象監測、風電領域、船舶領域,常用的風速風向測試技術包括風杯測試法、超聲波測試法等,本文在設計風力助航船的風速監測平臺時,主要采用的是超聲波風速測試傳感器,超聲波測試法又可以細分為時差法、多普勒法等,本文主要介紹多普勒法。
多普勒法是利用多普勒效率[2]進行風速風向測量的一種方法,當氣體中含有懸浮顆粒時,超聲波信號的多普勒頻移可以表示為:
式中:fr為超聲波發射器的發射信號頻率;fs為超聲波接收器的接收信號頻率;V為風速; θ為超聲波的入射角度;c為超聲波在流體中傳播的速度。
由式(1)可得風速為:
1)單向測速
圖1為基于多普勒法的單向風速測量原理。
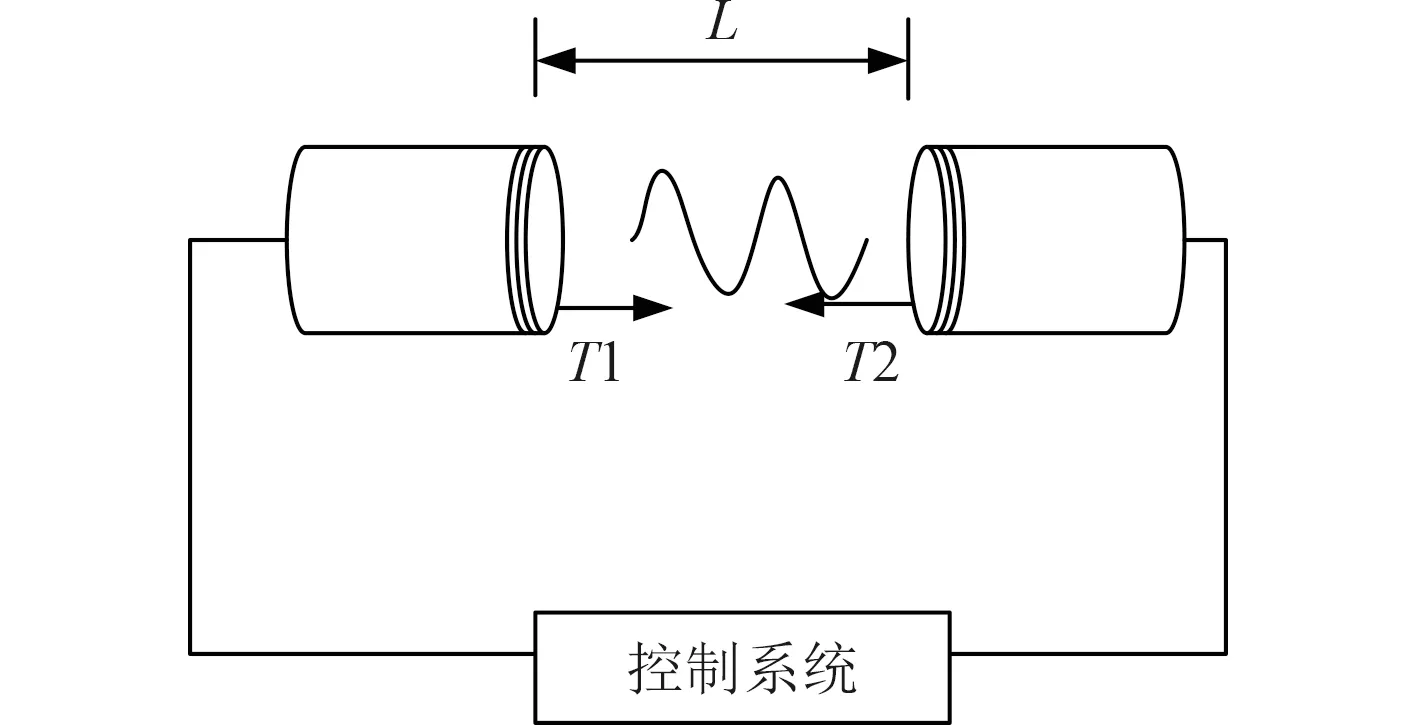
圖1 基于多普勒法的單向風速測量原理Fig.1 Principle of one-way wind speed measurement based on Doppler method
假設2個超聲波裝置之間的距離為d,超聲波傳播的速度為Vs,此時風速為Vw,順風時測的傳播時間為t12, 逆風時傳播時間為t21,可得:
進而得到風速Vw為 :
這種風速測量精度非常高,但只能測量單一風向的數據,且在實際應用場景中,風向往往是多向且不斷變化的。
2)多向測速
多向測速的原理圖如圖2所示。
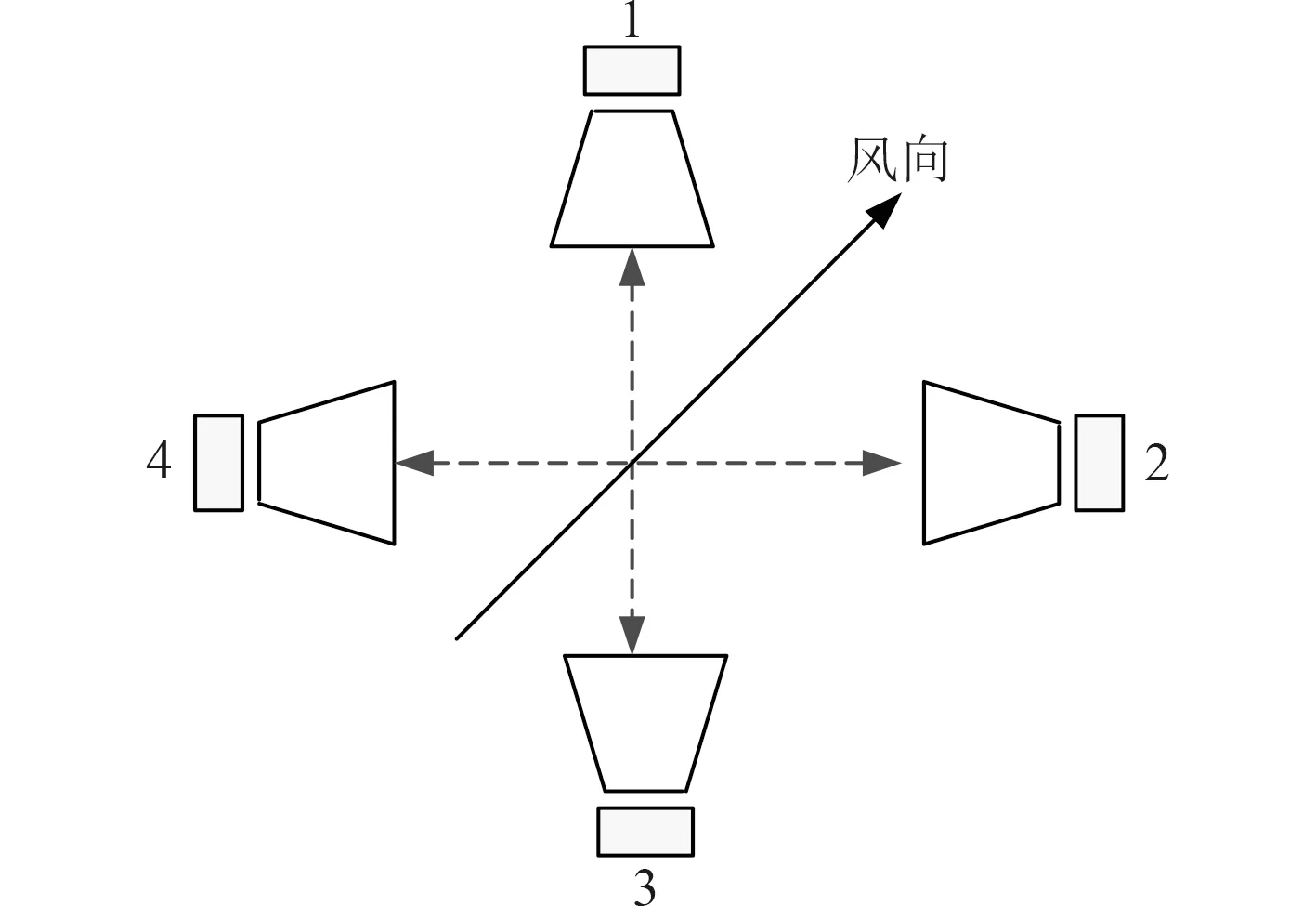
圖2 基于多普勒法的多向風速測量原理Fig.2 Principle of multidirectional wind velocity measurement based on Doppler method
如圖2,假設多個方向上有4組超聲波裝置,距離為d,超聲波傳播的速度為Vs,風速在南北方向上為Vwx,風速在東西方向上為Vwy,2組超聲波裝置測量得到的傳播時間分別為:順風時測的傳播時間為t12,逆風時測的傳播時間為t21;順風時測的傳播時間為t34,逆風時測的傳播時間為t43。可得:
可求得此時的風速為:
此時的風向為:
2 基于單片機的風力助航船風速監測技術開發
2.1 風速監測系統的整體開發
風力助航船的風速監測平臺具備以下功能:
1)數據的采集
監測平臺基于超聲波風速監測儀器和RS485通信電路,進行風速、風向的采集。同時,監測平臺還會同步采集船的航行速度、姿態角等參數[3]。
2)數據傳輸
平臺采集的風資源數據發送至單片機中和上位機中,并在上位機中進行存儲,單片機通過RS232通信接口將指令傳送至平臺的其他單元。
3)數據的處理和顯示
系統采用MSP430單片機進行數據的處理,并通過液晶顯示器將風資源數據展示給用戶,圖3為風力助航船的風速監測平臺原理圖。
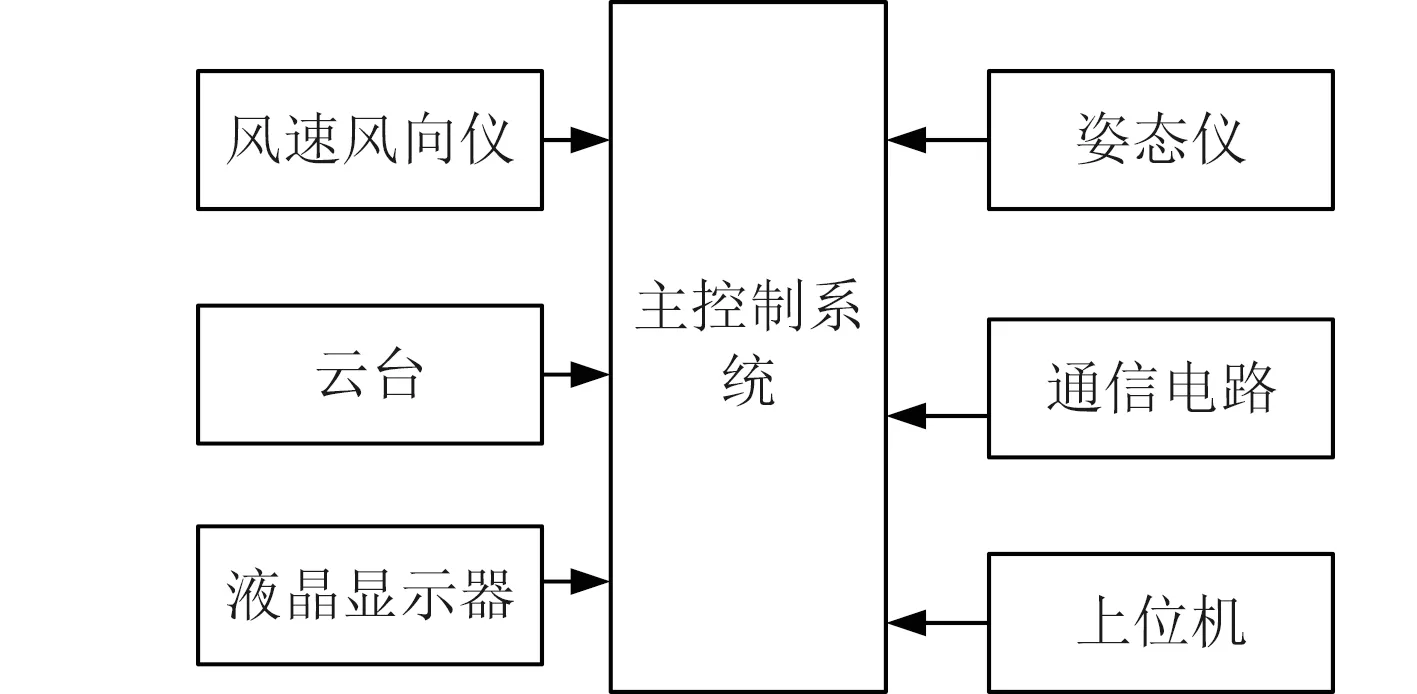
圖3 風力助航船的風速監測平臺原理圖Fig.3 Schematic diagram of wind speed monitoring platform for a wind-aided vessel
1)主控制系統
主控制系統是風力助航船的風速監測平臺核心,本文選用16位MSP430型單片機[4],該單元集成了60 Kflash 空間和2 k ram 存儲空間,具有2個串行通信接口,既能與上位機進行串口數據傳輸,也能同步或異步接收風速儀的數據。
2)姿態儀
針對船舶多自由度運動過程的姿態參數采集需求,本文采用三軸加速度傳感器MPU-600,該傳感器的性能出眾,具有三軸MEMS加速度計和可擴展處理器DMP。同時,姿態儀還具有其他數據接口,可以外接非慣性傳感器,如溫度傳感器和壓力傳感器等。
3)液晶顯示器
風力助航船監測平臺采用LCD液晶顯示器作為人機交互接口,LCD顯示器通過PSB引腳[5]的高低電平確定串口顯示,LCD液晶顯示器的引腳時序圖4。
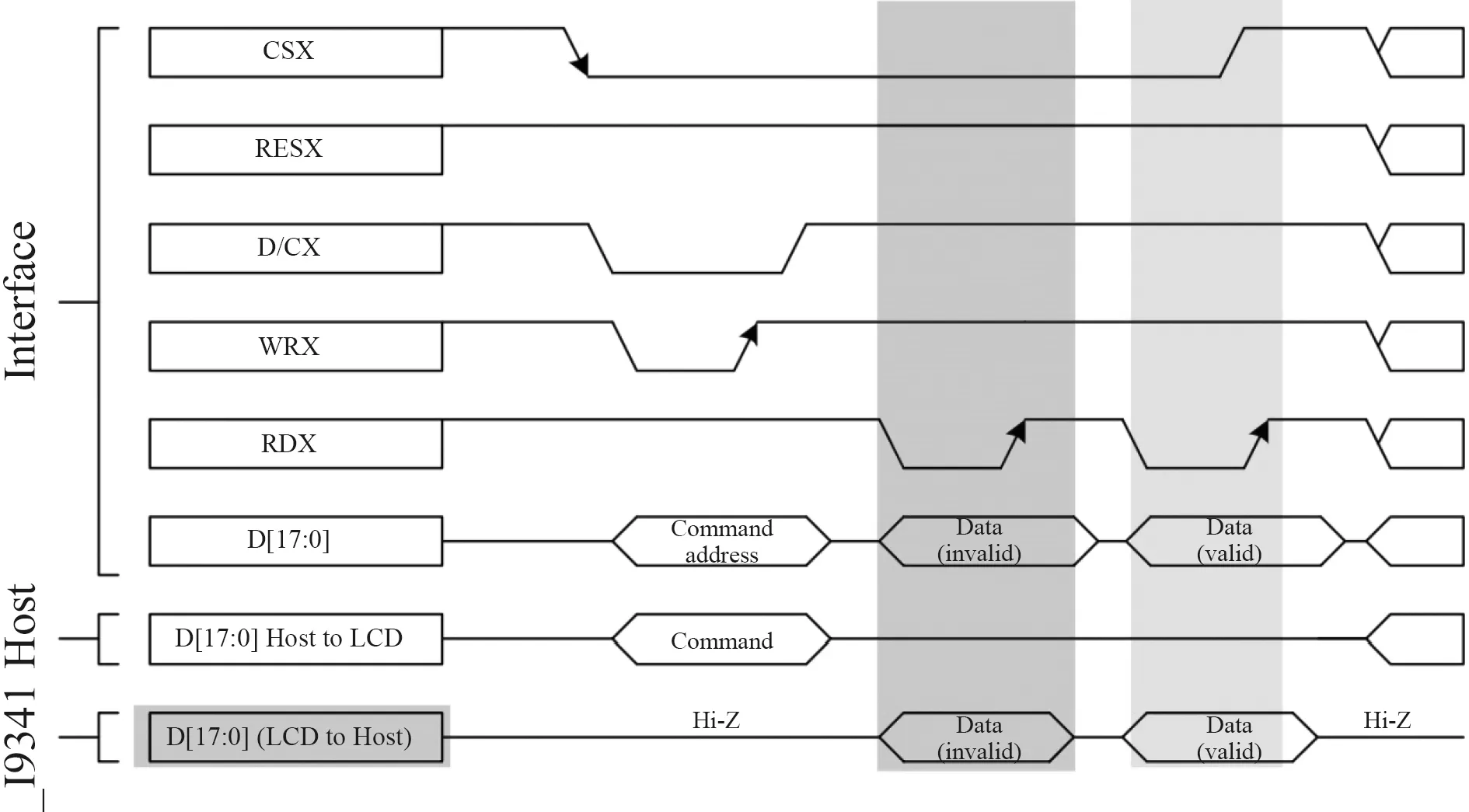
圖4 LCD液晶顯示器的引腳時序圖Fig.4 Pin sequencediagram of LCD liquid crystal display
2.2 風力助航船的風速數據后處理研究
為了提高風速監測平臺的數據采集精度,針對不同風向下的數據采集結果,本文提出一種風向矢量合成的數據后處理算法。該算法將風的空間矢量分解到X軸和Y軸兩個分量,矢量合成的原理圖5所示。
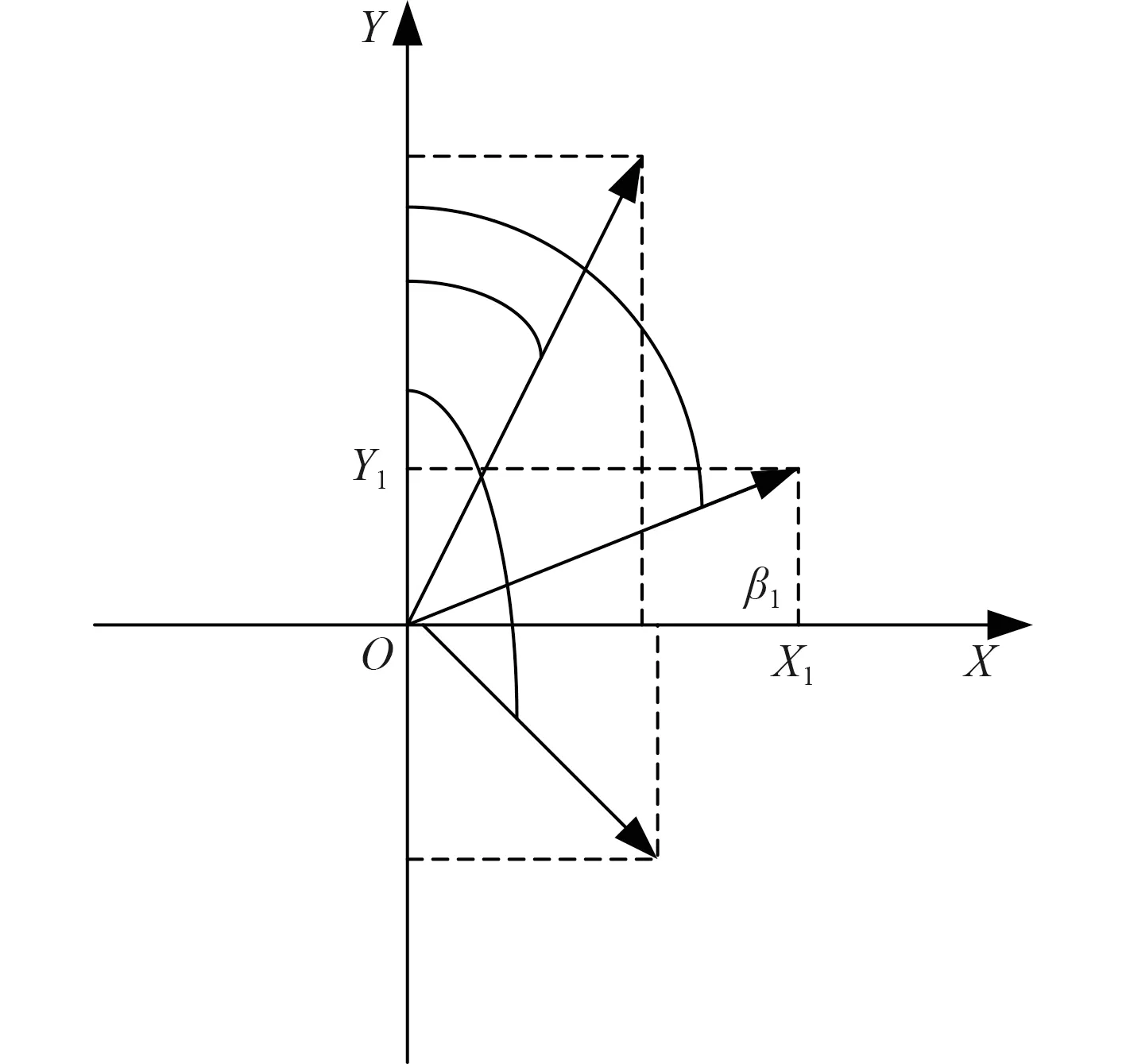
圖5 風向矢量合成原理圖Fig.5 Schematic diagram of vector synthesis
得到第一組測試數據的風向矢量分解為:
β1為第1組數據的風向,假設一次數據采集過程產生的數據量為n組,則可以得到:
得到風向的平均值和風向值為:
2.3 風力助航船風速監測系統平臺工作流程
監測平臺選用的風速風向儀為A45固體傳感器,基于IEC6122通信協議[6],監測平臺的工作流程圖如圖6所示。
3 結語
風力助航船是一種新興的新能源船舶,這種船舶能夠利用海上豐富的風力資源,提高自身動力系統的性能,風力助航船的關鍵控制輸入是風資源數據,本文針對風資源數據的采集原理、平臺建設、數據后處理等進行詳細研究,有一定的實際應用價值。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
