柔性基座冗余機(jī)械臂的最優(yōu)反作用控制
2023-05-22 03:44:26尹旺王翔王為劉冬雨
中國(guó)空間科學(xué)技術(shù) 2023年2期
尹旺,王翔,王為,劉冬雨
北京空間飛行器總體設(shè)計(jì)部,北京 100094
1 引言
為了提升機(jī)械臂的綜合性能如快速響應(yīng)、高精度和大負(fù)載,世界各航天大國(guó)開(kāi)展了宏微機(jī)械臂的研制工作[1-3],文獻(xiàn)[4]綜述了空間宏微機(jī)械臂的控制方式。為了減輕機(jī)械臂自重、節(jié)約發(fā)射成本,臂桿一般采用輕型、細(xì)長(zhǎng)的碳纖維材料,因此宏機(jī)械臂輕質(zhì)、大跨度的特點(diǎn)使其表現(xiàn)出柔性特性[5-7]。宏微機(jī)械臂通常采用分時(shí)獨(dú)立的控制方式,因此微機(jī)械臂操作時(shí)宏機(jī)械臂相當(dāng)于柔性的被動(dòng)支撐結(jié)構(gòu),后文稱(chēng)為柔性基座機(jī)械臂。
機(jī)械臂與柔性基座之間存在動(dòng)力學(xué)耦合,機(jī)械臂的運(yùn)動(dòng)會(huì)激起柔性基座的振動(dòng),基座的振動(dòng)反過(guò)來(lái)又會(huì)影響機(jī)械臂末端精度[8-9]。為解決此問(wèn)題,文獻(xiàn)[10]基于動(dòng)量守恒原理推導(dǎo)了柔性基座機(jī)械臂的耦合矩陣,并據(jù)此提出了耦合圖的概念,從能量傳遞的角度揭示了機(jī)械臂運(yùn)動(dòng)與基座振動(dòng)之間的動(dòng)力學(xué)耦合關(guān)系。文獻(xiàn)[11-12]對(duì)柔性基座機(jī)械臂“點(diǎn)到點(diǎn)”的運(yùn)動(dòng)進(jìn)行了軌跡規(guī)劃研究,關(guān)節(jié)軌跡函數(shù)采用多項(xiàng)式函數(shù)和擺線函數(shù)構(gòu)成的復(fù)合函數(shù),以基座的振動(dòng)幅值和機(jī)械臂操作能量作為目標(biāo)函數(shù),基于多目標(biāo)優(yōu)化技術(shù)對(duì)待定參數(shù)進(jìn)行優(yōu)化從而得到了最優(yōu)軌跡曲線。
文獻(xiàn)[13]利用微機(jī)械臂運(yùn)動(dòng)產(chǎn)生的慣性力對(duì)柔性基座進(jìn)行了主動(dòng)阻尼控制。文獻(xiàn)[14]提出了一種改進(jìn)的主動(dòng)阻尼控制方案,提高了軌跡跟蹤誤差的收斂速度,同時(shí)對(duì)基座的抑振效果更好。
文獻(xiàn)[15]首次將反作用零空間的概念引入到柔性基座機(jī)械臂系統(tǒng)中,零反作用的控制法能使微機(jī)械臂與柔性基座完全解耦,即機(jī)械臂在完成運(yùn)動(dòng)的同時(shí)不對(duì)基座產(chǎn)生任何擾動(dòng)。文獻(xiàn)[16]將Nenchev提出的算法成功應(yīng)用到JEMRMS/SFA系統(tǒng),該系統(tǒng)前3個(gè)關(guān)節(jié)視為柔性基座,后9個(gè)關(guān)節(jié)視為微機(jī)械臂,仿真結(jié)果證實(shí)了算法對(duì)于真實(shí)系統(tǒng)的適用性。文獻(xiàn)[17]又將反作用零空間運(yùn)動(dòng)控制應(yīng)用到德國(guó)類(lèi)人型機(jī)器人,并開(kāi)展了實(shí)驗(yàn)研究。
雖然零反作用的控制法能使微機(jī)械臂與柔性基座完全解耦,但由于系統(tǒng)中非線性問(wèn)題突出,振動(dòng)抑制和零反作用的末端跟蹤控制算法只在很小的工作空間內(nèi)適用。另外,反作用零空間的控制法對(duì)微機(jī)械自由度的要求很高,微機(jī)械臂相對(duì)于柔性基座的冗余度應(yīng)大于操作空間維數(shù),否則方法失效,原因是零反作用法將反作用最優(yōu)作為主要任務(wù),而軌跡跟蹤作為次要任務(wù)。因此,有人將軌跡跟蹤作為主要任務(wù),反作用優(yōu)化作為次要任務(wù)開(kāi)展了研究[18-19]。
文獻(xiàn)[20]基于拉格朗日乘子法和最小二乘推導(dǎo)得到冗余機(jī)械臂的反作用最優(yōu)控制法。文獻(xiàn)[21]利用機(jī)械臂的運(yùn)動(dòng)學(xué)冗余特性減小了機(jī)械臂機(jī)動(dòng)激起的基座振動(dòng),基于激振最小化和基座能量衰減的方法都屬于局部?jī)?yōu)化,在對(duì)基座振動(dòng)幅值優(yōu)化時(shí)可能使得機(jī)械臂關(guān)節(jié)速度過(guò)大從而造成系統(tǒng)失穩(wěn)。文獻(xiàn)[22]對(duì)柔性基座冗余機(jī)械臂系統(tǒng)進(jìn)行了最優(yōu)反作用控制,分別以基座反作用力最小、基座能量衰減以及兩者綜合最優(yōu)為目標(biāo),為冗余機(jī)械臂的自運(yùn)動(dòng)項(xiàng)設(shè)計(jì)了控制律。
通常情況下,系統(tǒng)中柔性坐標(biāo)遠(yuǎn)大于機(jī)械臂的冗余度,因此基于最小二乘法求得的自運(yùn)動(dòng)項(xiàng)不能完全消除機(jī)械臂剛性運(yùn)動(dòng)產(chǎn)生的激振力。考慮到柔性系統(tǒng)響應(yīng)的幅值主要由低階模態(tài)決定,將柔性機(jī)械臂系統(tǒng)的振動(dòng)方程從物理空間轉(zhuǎn)換到模態(tài)空間,在保證機(jī)械臂末端軌跡跟蹤的前提下,文獻(xiàn)[23]利用冗余機(jī)械臂在零空間的自運(yùn)動(dòng)消除了系統(tǒng)中的低階的模態(tài)力,從而減小了機(jī)械臂剛性運(yùn)動(dòng)過(guò)程中激起的彈性位移,提高了末端跟蹤精度。國(guó)內(nèi)方面,文獻(xiàn)[24]也開(kāi)展過(guò)類(lèi)似研究。
前人對(duì)柔性機(jī)械臂的研究多以簡(jiǎn)單的平面二連桿、三連桿機(jī)械臂為研究對(duì)象。本文以空間站柔性基座冗余機(jī)械臂為研究對(duì)象,對(duì)剛性微機(jī)械臂在運(yùn)動(dòng)零空間的自運(yùn)動(dòng)進(jìn)行合理設(shè)計(jì),從而使微機(jī)械臂在完成軌跡跟蹤的同時(shí)使基座受到的擾動(dòng)最小。
2 柔性基座機(jī)械臂建模
若剛性微機(jī)械臂關(guān)節(jié)個(gè)數(shù)為n,基座柔性自由度為m,則根據(jù)第二類(lèi)拉格朗日方程求得柔性基座機(jī)械臂動(dòng)力學(xué)方程為[25]:
(1)

將式(1)展開(kāi)得到柔性基座的彈性振動(dòng)方程為:

(2)


(3)
式中:Jb為和機(jī)械臂基座運(yùn)動(dòng)相關(guān)的雅克比矩陣,Jm為和機(jī)械臂關(guān)節(jié)運(yùn)動(dòng)相關(guān)的雅克比矩陣,也是地面固定基機(jī)械臂的雅克比矩陣。
式(3)對(duì)時(shí)間求導(dǎo)得到機(jī)械臂末端加速度與關(guān)節(jié)角加速度之間的關(guān)系為:

(4)
柔性基座不具備控制能力,因此由式(4)得到機(jī)械臂加速度級(jí)的逆運(yùn)動(dòng)學(xué)表達(dá)式為:

(5)

3 冗余機(jī)械臂的自運(yùn)動(dòng)控制
3.1 基于PD控制律的軌跡跟蹤
當(dāng)機(jī)械臂末端跟蹤任務(wù)空間的期望軌跡時(shí),可采用簡(jiǎn)單的PD控制律:

(6)

式(6)代入式(5)即可得到關(guān)節(jié)加速度級(jí)的控制律為:

(7)
若不考慮機(jī)械臂的自運(yùn)動(dòng),即令機(jī)械臂的自運(yùn)動(dòng)矢量ε=0,得到最小范數(shù)解:

(8)
式(8)代入式(1)并展開(kāi),得到機(jī)械臂關(guān)節(jié)驅(qū)動(dòng)力矩的控制律為:
3.2 偽逆形式的冗余解
通常情況下,微機(jī)械臂的末端位姿控制是其主要任務(wù),反作用優(yōu)化及振動(dòng)抑制為次級(jí)任務(wù),次級(jí)任務(wù)的實(shí)施應(yīng)以不影響主要任務(wù)為前提。當(dāng)微機(jī)械臂相對(duì)操作空間具有冗余度時(shí),為次級(jí)任務(wù)的實(shí)現(xiàn)提供了條件,即在微機(jī)械臂的運(yùn)動(dòng)零空間內(nèi)實(shí)現(xiàn)對(duì)次級(jí)任務(wù)進(jìn)行優(yōu)化。

目標(biāo)函數(shù)可以轉(zhuǎn)化為如下形式:
當(dāng)自運(yùn)動(dòng)項(xiàng)矢量ε滿(mǎn)足如下關(guān)系時(shí)可使目標(biāo)函數(shù)值達(dá)到最小,此時(shí)微機(jī)械臂產(chǎn)生的反作用力完全被消除:
HbmZε=

(9)
式(9)表示具有ρ個(gè)未知數(shù)的m個(gè)代數(shù)方程,rank(HbmZ∈Rm×ρ)=min(m,ρ),rank表示矩陣的秩。通常情況下,微機(jī)械臂的冗余自由度ρ遠(yuǎn)小于柔性基座的自由度m,因此HbmZ不可逆,為了得到自運(yùn)動(dòng)矢量的表達(dá)式用偽逆代替求逆,于是得到最小二乘意義下的自運(yùn)動(dòng)項(xiàng)系數(shù):
(10)
式(10)代入式(7)中,得到基于關(guān)節(jié)角加速度的控制律為:

(11)
由于基座的柔性自由度數(shù)遠(yuǎn)大于機(jī)械臂的冗余自由度數(shù),最小二乘意義的逆解不能完全消除機(jī)械臂剛性運(yùn)動(dòng)產(chǎn)生的反作用力/力矩,當(dāng)機(jī)械臂的冗余自由度ρ等于基座的柔性自由度m時(shí)HbmZ滿(mǎn)秩,基于式(9)可求得ε的唯一解,此時(shí)利用微機(jī)械臂的自運(yùn)動(dòng)項(xiàng)可完全消除反作用力,該方法對(duì)微機(jī)械臂的冗余度要求較高,在工程實(shí)際中難以實(shí)現(xiàn)。
3.3 模態(tài)空間的冗余解
由結(jié)構(gòu)動(dòng)力學(xué)理論知,多自由度結(jié)構(gòu)的振動(dòng)響應(yīng)主要由低階主振型決定,而高階模態(tài)對(duì)系統(tǒng)響應(yīng)的影響很小。基于模態(tài)變換技術(shù)將系統(tǒng)的振動(dòng)方程轉(zhuǎn)換到模態(tài)空間,然后利用機(jī)械臂的冗余特性消除低階主模態(tài)力,當(dāng)機(jī)械臂具有ρ個(gè)冗余自由度時(shí),利用該冗余自由度可以消除振動(dòng)系統(tǒng)中的前ρ階主模態(tài)力。

式(1)兩邊同時(shí)左乘Γ*T,并引入坐標(biāo)變換xb=Φ*ξ,若不計(jì)外力,柔性基座機(jī)械臂系統(tǒng)在模態(tài)空間的動(dòng)力學(xué)方程為:
(12)

式(12)展開(kāi)后得到柔性基座在模態(tài)空間的振動(dòng)方程:

(13)
為得到模態(tài)坐標(biāo)下的初始條件,可作如下變換:

(14)

式(7)代入式(13)中,得到柔性基座前ρ階模態(tài)力的表達(dá)式為:

(15)


(16)
式(16)代入式(7)即可得到機(jī)械臂關(guān)節(jié)加速度級(jí)的控制律:

(17)
由于低階模態(tài)是影響結(jié)構(gòu)響應(yīng)的主要因素,當(dāng)微機(jī)械臂冗余度為ρ時(shí),可利用微機(jī)械臂的自運(yùn)動(dòng)項(xiàng)使其產(chǎn)生的前ρ階模態(tài)力為零。此時(shí)剩余的高階模態(tài)力對(duì)結(jié)構(gòu)的振動(dòng)響應(yīng)很小,從而使得微機(jī)械臂在執(zhí)行任務(wù)過(guò)程中激起的基座振幅很小。
4 仿真分析
4.1 平面3自由度機(jī)械臂
平面內(nèi)的3連桿機(jī)械臂安裝在柔性基座上,柔性基座具有2個(gè)平動(dòng)自由度和1個(gè)轉(zhuǎn)動(dòng)自由度(如圖1所示),機(jī)械臂系統(tǒng)各參數(shù)參見(jiàn)文獻(xiàn)[22]。令機(jī)械臂末端跟蹤一條圓心為(4.953,-0.305)、半徑為r=0.6m的半圓軌跡,軌跡起點(diǎn)為(5.553,-0.297),終點(diǎn)為(4.353,-0.297),不考慮機(jī)械臂末端姿態(tài)的變化,則3自由度機(jī)械臂有一個(gè)冗余自由度,分別基于式(8)、式(11)和式(17)對(duì)機(jī)械臂進(jìn)行軌跡跟蹤控制,下文稱(chēng)之為最小范數(shù)解、偽逆形式冗余解和模態(tài)空間冗余解,仿真結(jié)果如圖2~圖4所示。
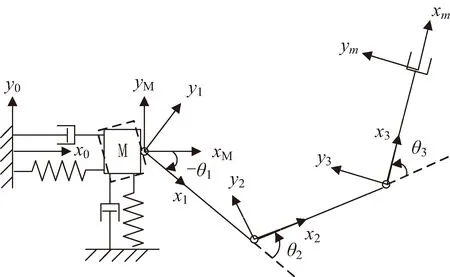
圖1 平面3自由度柔性基座機(jī)械臂Fig.1 Planner 3DOF manipulator with flexible base
由圖2知,最小范數(shù)解可使機(jī)械臂各關(guān)節(jié)以最小的運(yùn)動(dòng)量完成軌跡跟蹤任務(wù),但此時(shí)機(jī)械臂運(yùn)動(dòng)產(chǎn)生的各階模態(tài)力幅值相當(dāng),基座的第一階模態(tài)坐標(biāo)幅值明顯大于其他兩階。由圖3知,采取偽逆解時(shí),第一階模態(tài)力的幅值有所下降,但是仍然不為零。由圖4知,采取模態(tài)空間的冗余解時(shí),機(jī)械臂運(yùn)動(dòng)產(chǎn)生的第一階模態(tài)力和基座的第一階模態(tài)坐標(biāo)幾乎完全為零。
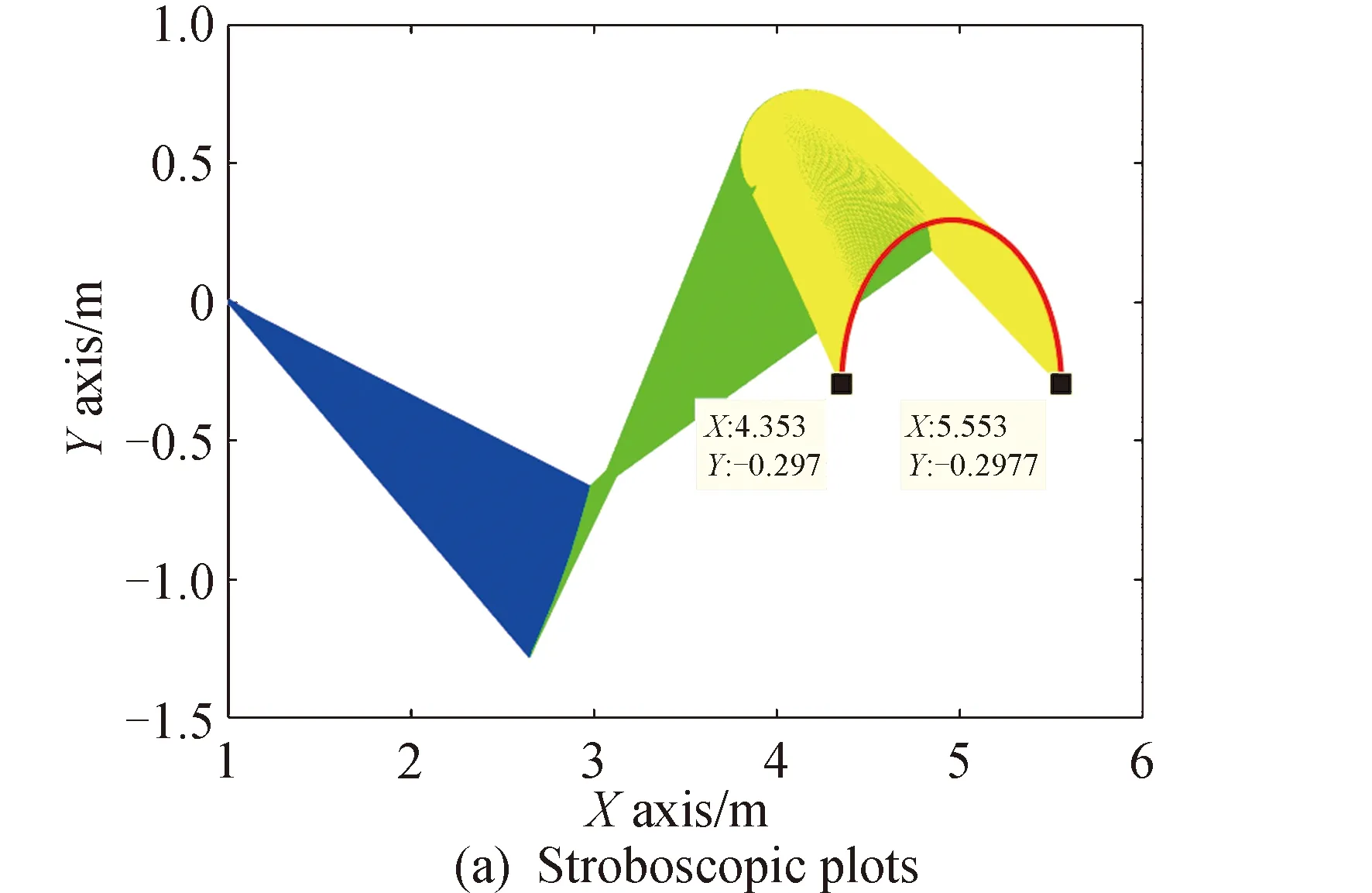
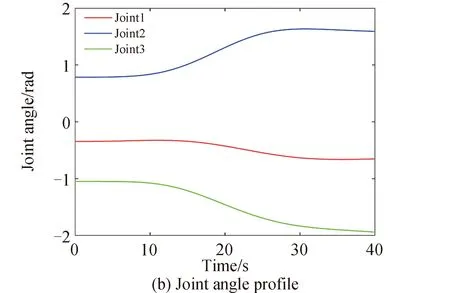
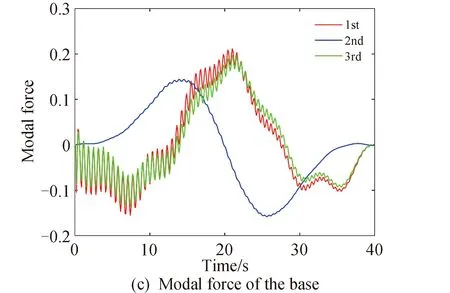

圖2 基于最小范數(shù)解的運(yùn)動(dòng)控制Fig.2 Motion control of minimum norm
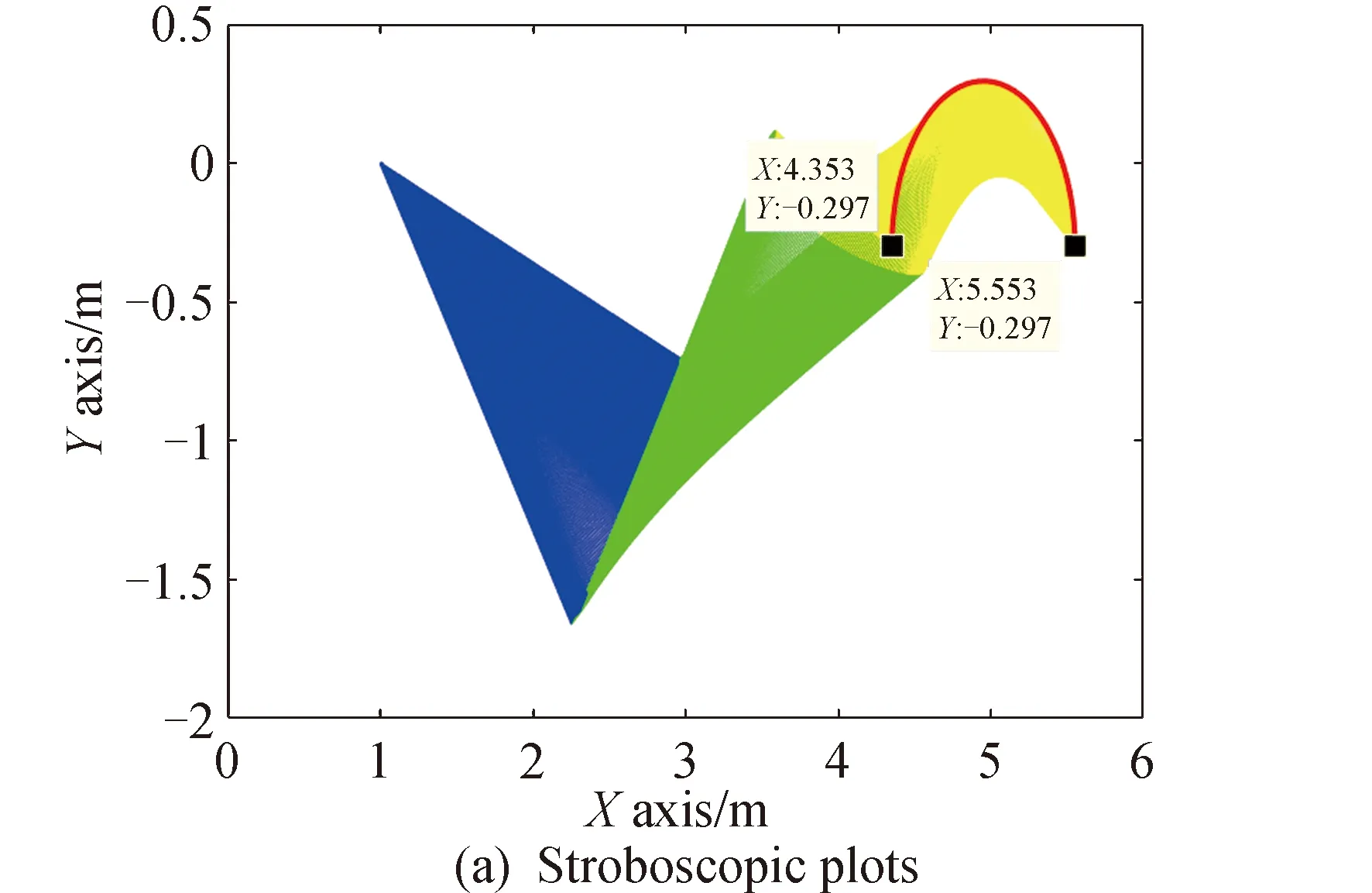
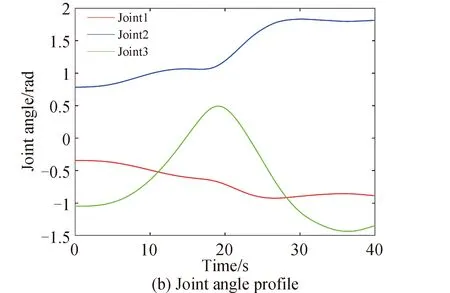
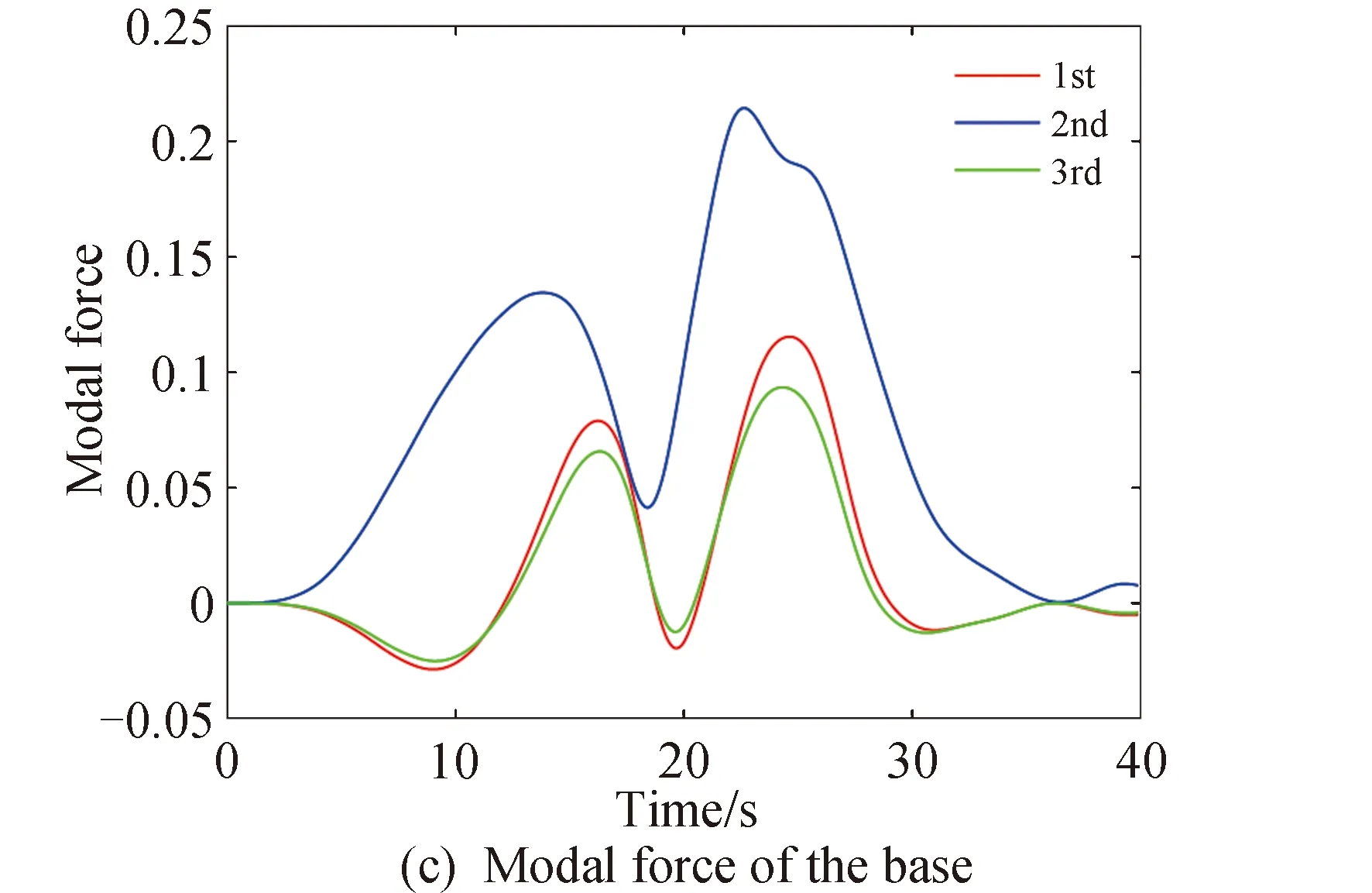
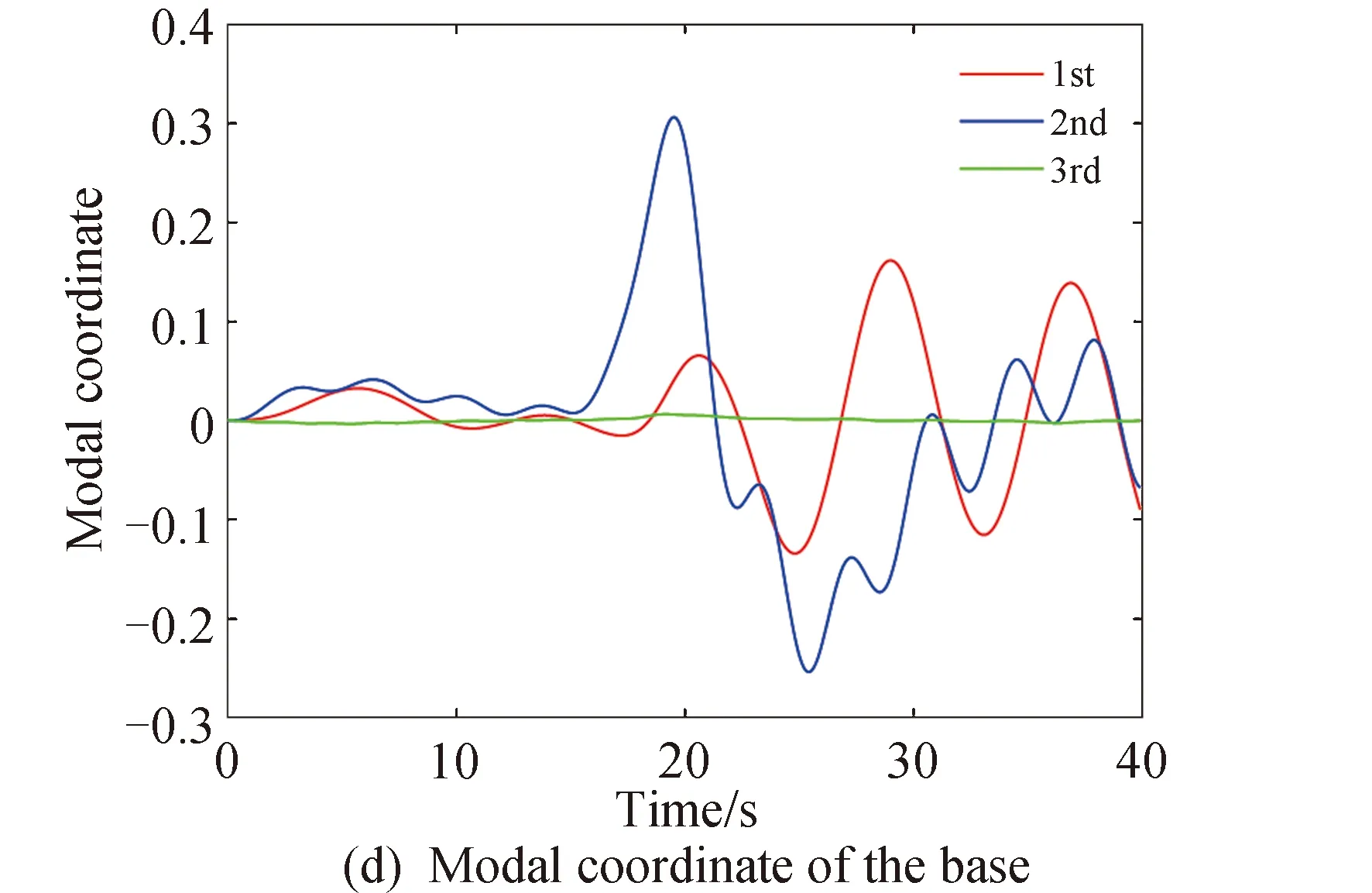
圖3 基于偽逆的運(yùn)動(dòng)控制Fig.3 Motion control of pseudo-inverse resolution
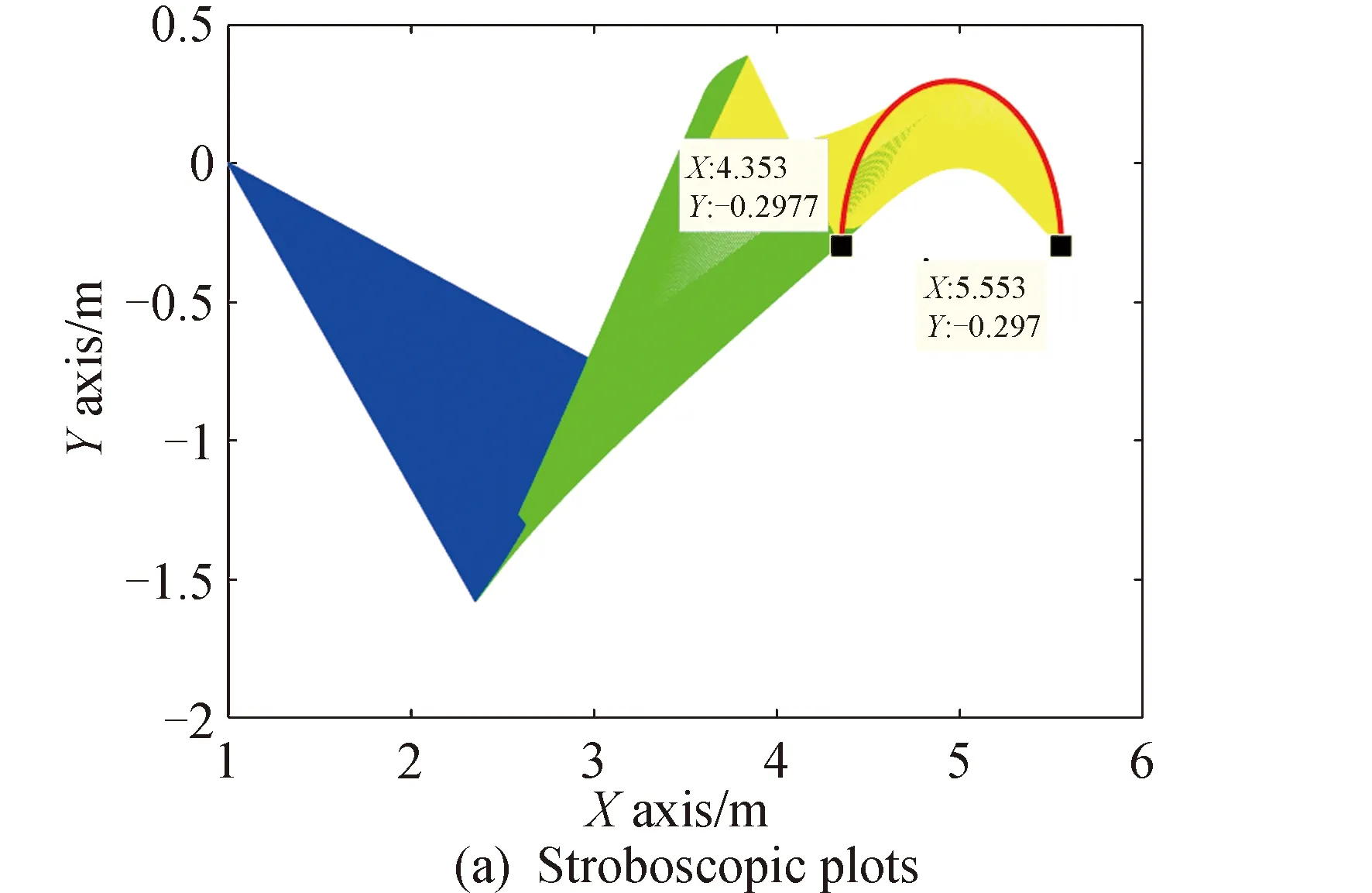
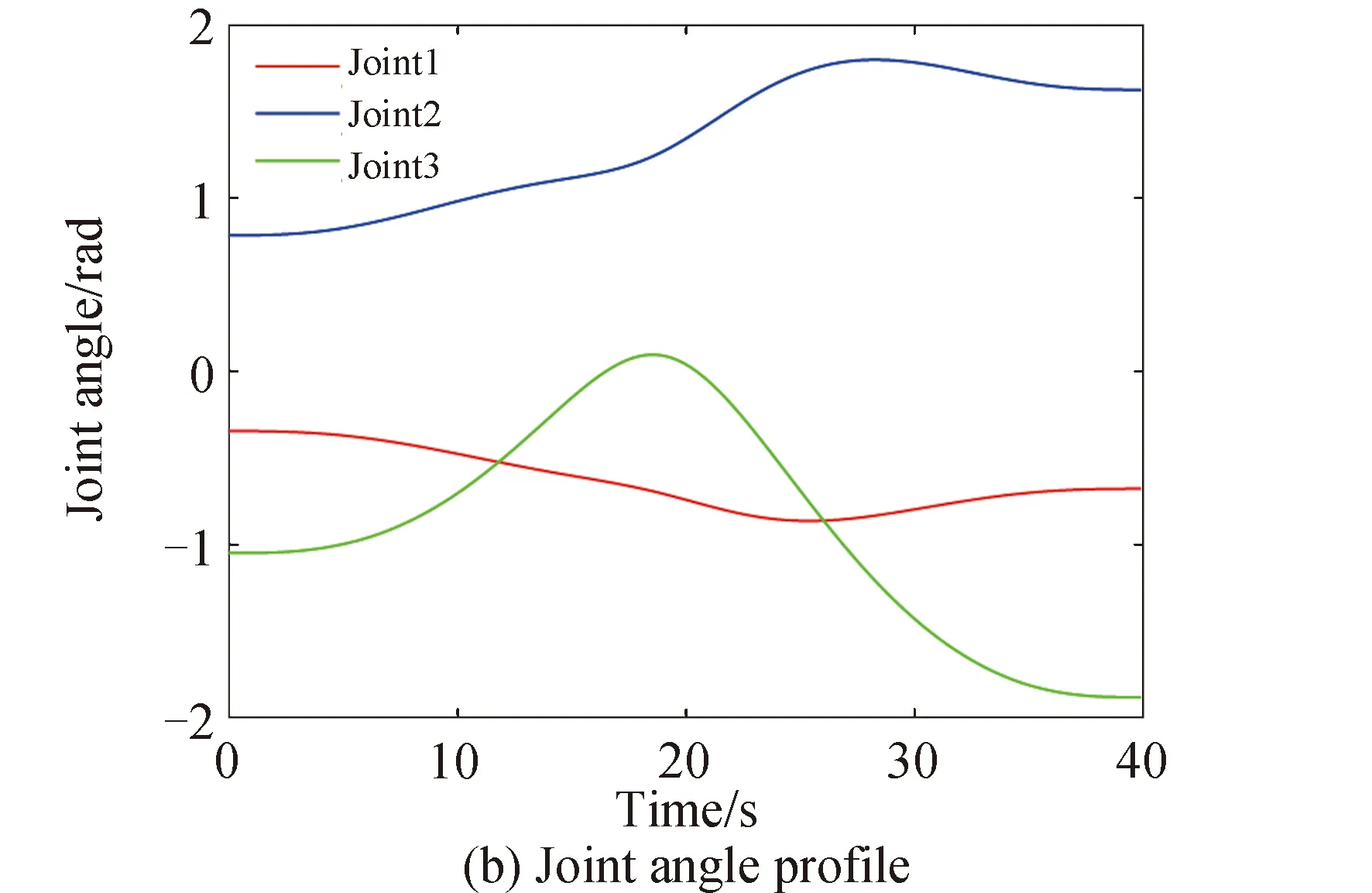
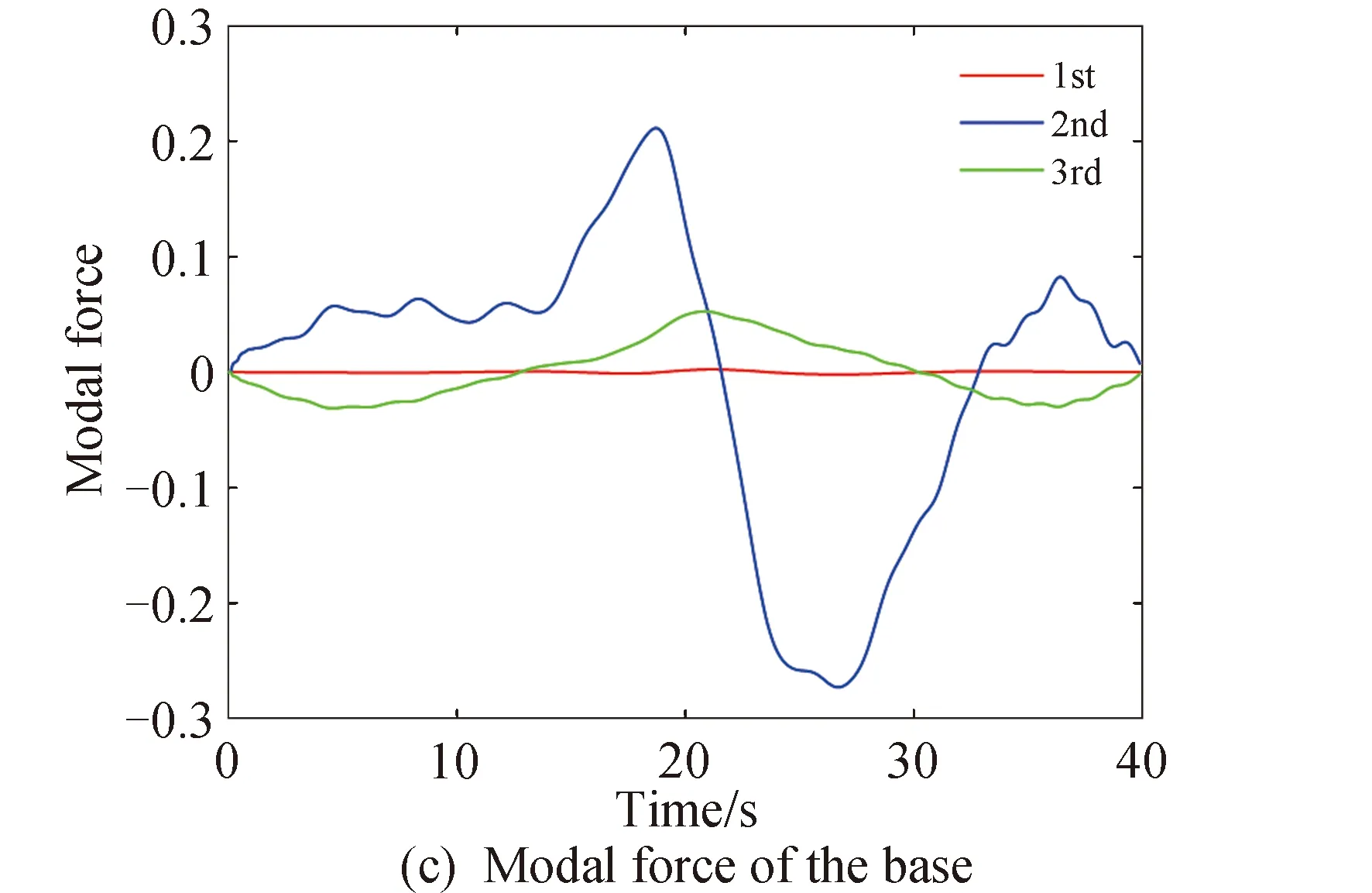
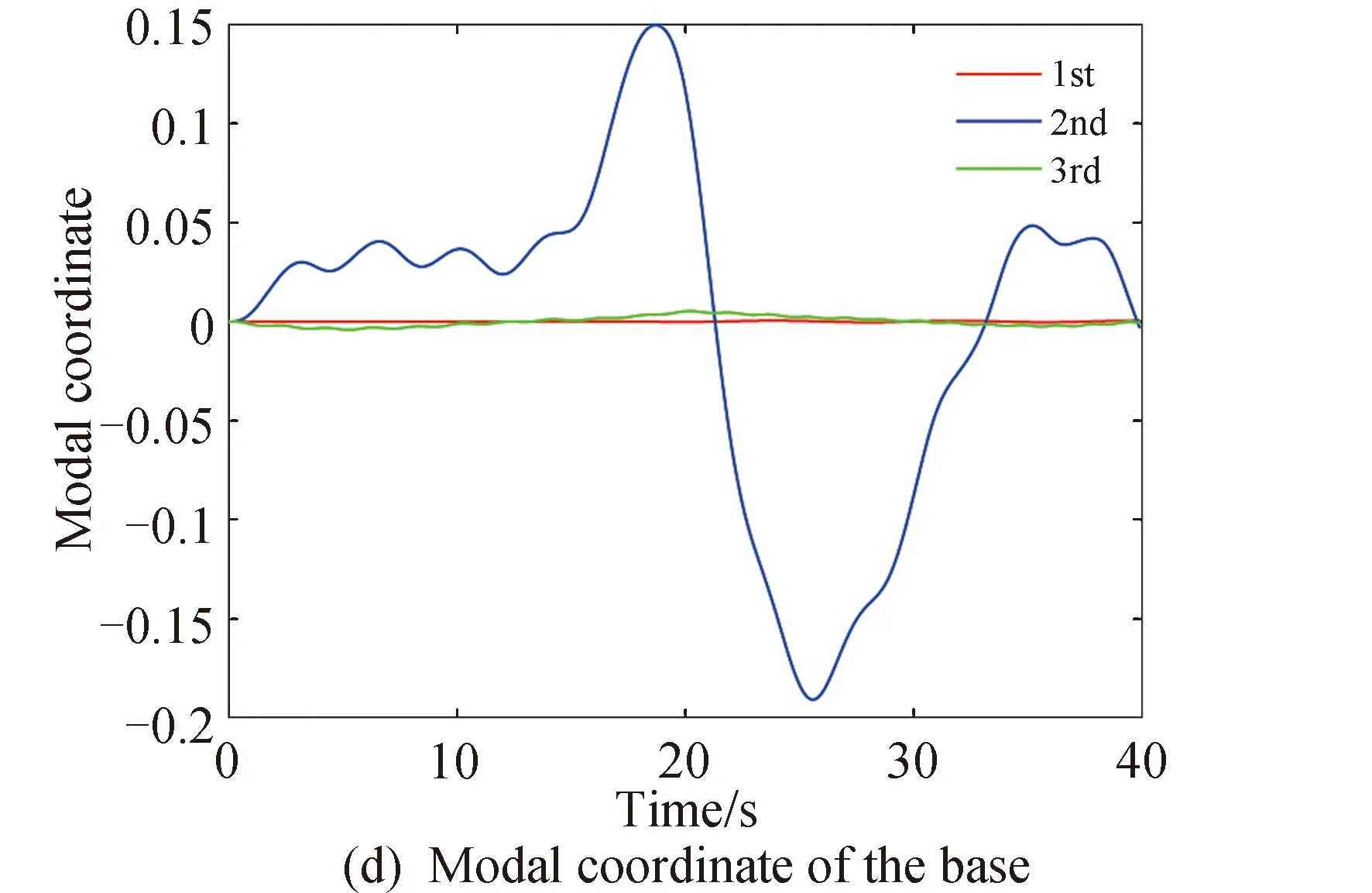
圖4 基于模態(tài)空間冗余解的運(yùn)動(dòng)控制Fig.4 Motion control of redundancy resolution in modal space
柔性基座3個(gè)自由度的振動(dòng)位移如圖5所示。由圖知基座沿x軸向的抑振效果不明顯,原因在于基座沿x軸向的位移主要由第二階模態(tài)坐標(biāo)決定。而該仿真模型只有1個(gè)冗余度,因此利用該冗余度只消除了第一階模態(tài)力。相比于最小范數(shù)解,基于偽逆解的仿真結(jié)果沿著y軸和繞z軸的最大位移分別降低了49%、68%,而相比于偽逆解,消除第一階模態(tài)力的仿真結(jié)果沿x軸、y軸和z軸的最大彈性位移分別降低了38%、95%、51%。
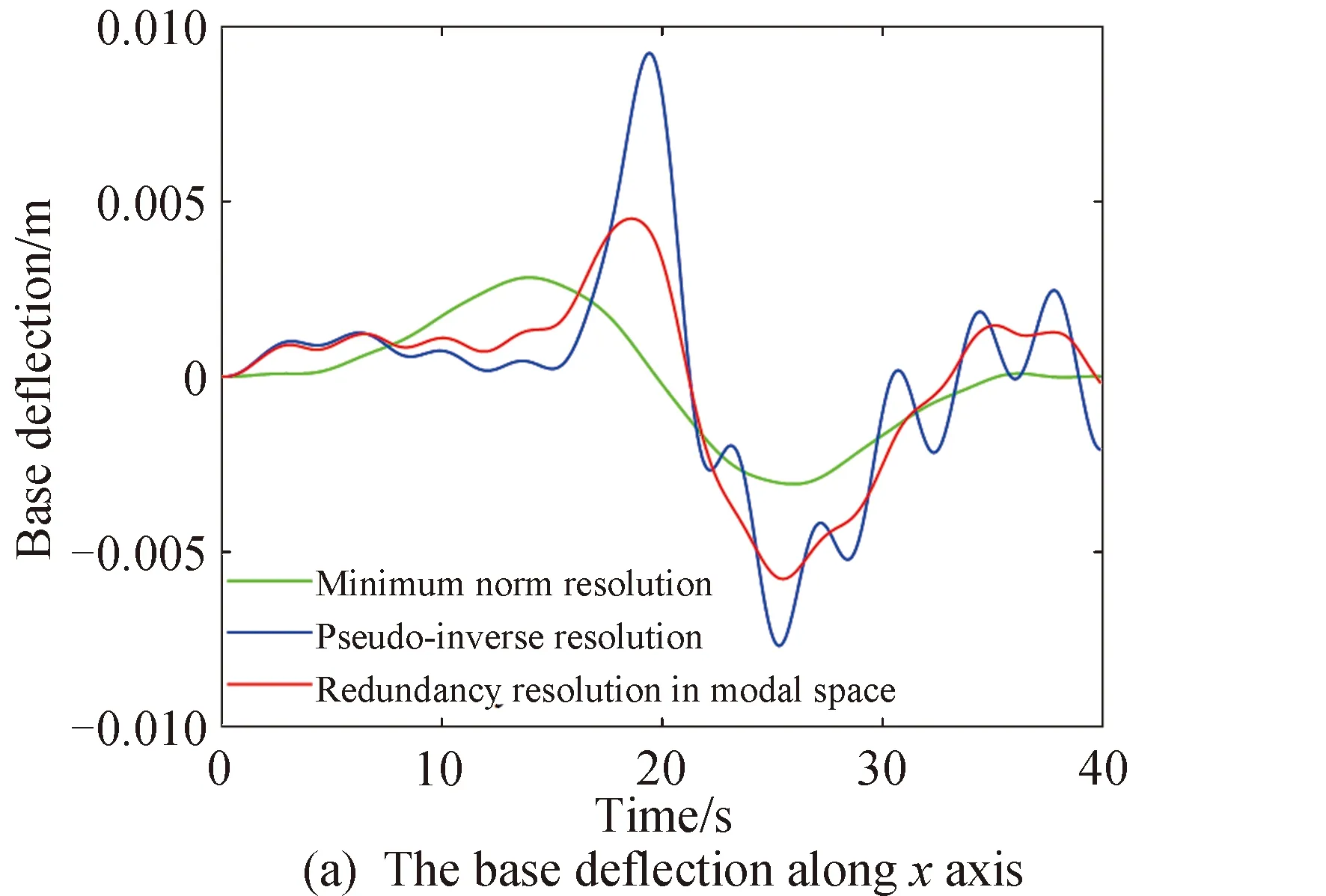
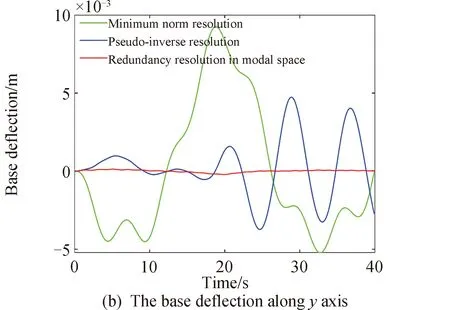
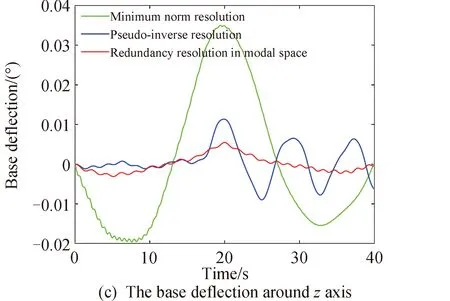
圖5 基座各方向的振動(dòng)位移對(duì)比Fig.5 Vibration comparison of base in all directions
由此可見(jiàn),通過(guò)對(duì)冗余機(jī)械臂的自運(yùn)動(dòng)矢量設(shè)計(jì)合適的控制律可降低柔性基座所受到的擾動(dòng)。當(dāng)機(jī)械臂的冗余度越高時(shí),借助冗余臂的自運(yùn)動(dòng)可消除更多階的模態(tài)力,從而基座受到的擾動(dòng)更加不明顯,基座的振幅越小,則機(jī)械臂末端的操作精度也越高。該算例對(duì)具有1個(gè)冗余自由度的柔性基座機(jī)械臂進(jìn)行了抑振分析,下面算例對(duì)多個(gè)冗余自由度的情形進(jìn)行仿真分析。
4.2 空間7自由度機(jī)械臂
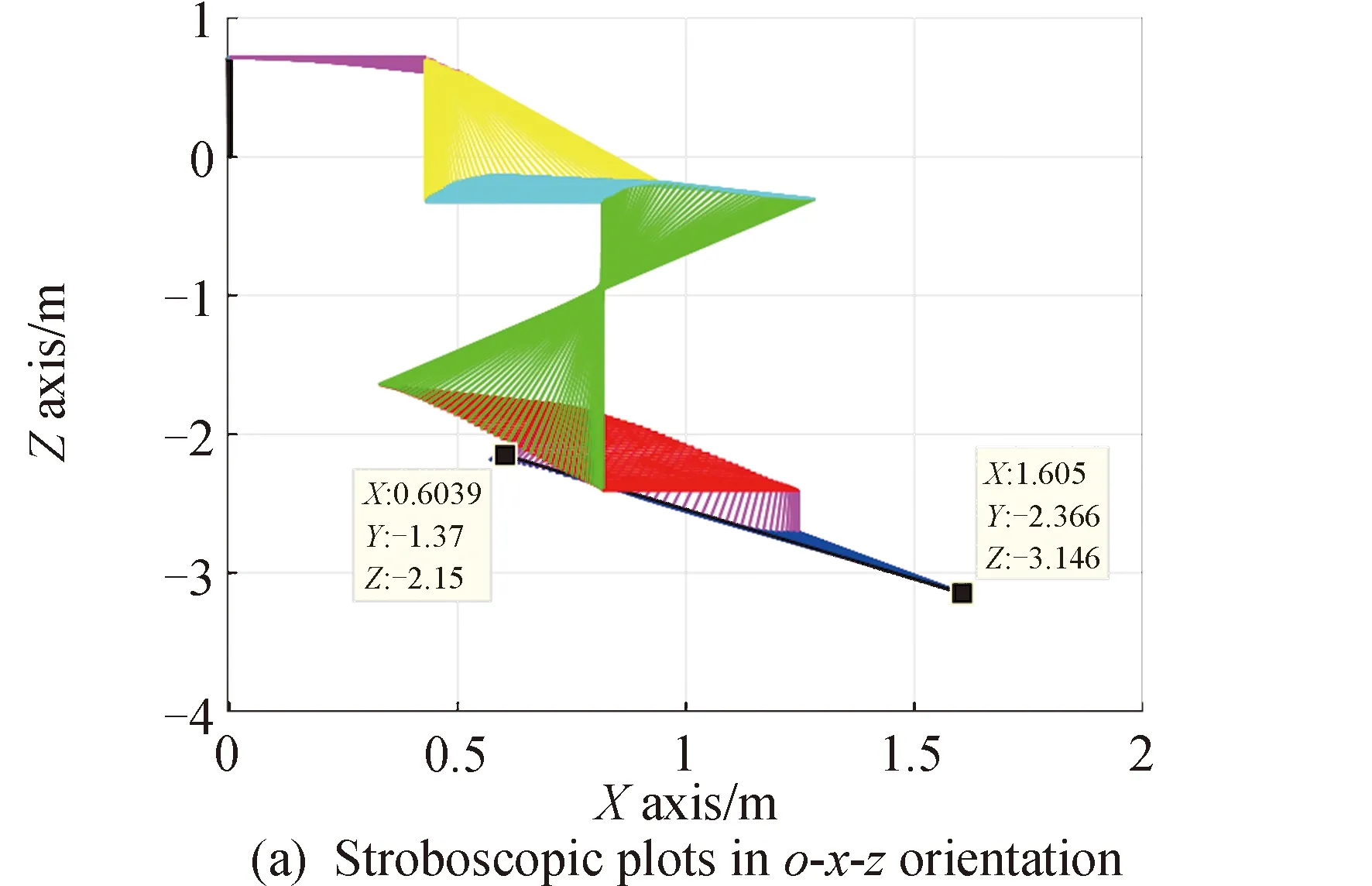
以空間柔性基座機(jī)械臂為例進(jìn)行仿真,微機(jī)械臂具有7個(gè)自由度,柔性基座具有6個(gè)自由度(見(jiàn)圖6),機(jī)械臂參數(shù)見(jiàn)文獻(xiàn)[26]。不考慮機(jī)械臂末端姿態(tài)變化,令其跟蹤一條三維空間內(nèi)的直線,從(1.605,-2.3657,-3.1465)運(yùn)動(dòng)到(0.605,-1.3657,-2.1465),通過(guò)對(duì)冗余機(jī)械臂的自運(yùn)動(dòng)矢量進(jìn)行優(yōu)化設(shè)計(jì),使基座擾動(dòng)最優(yōu)。
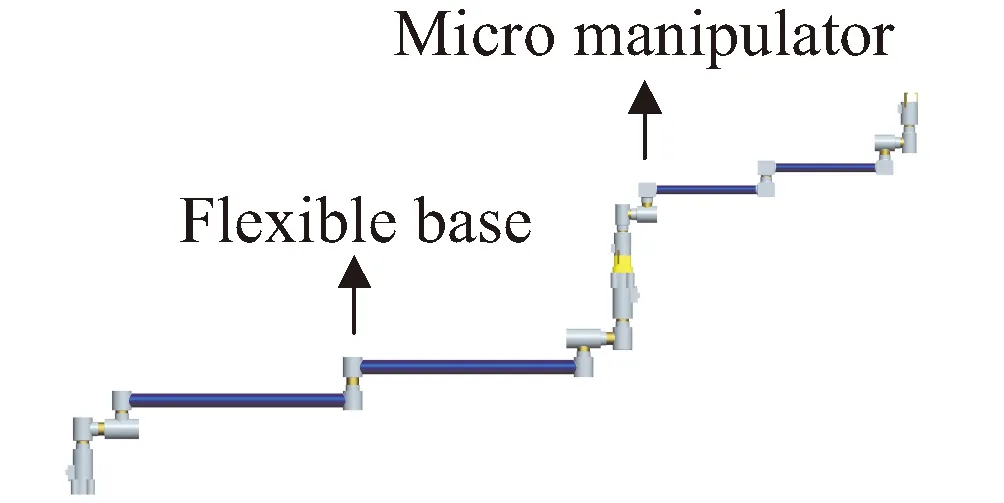
圖6 空間七自由度柔性基座機(jī)械臂Fig.6 Special 7 DOF manipulator with flexible base
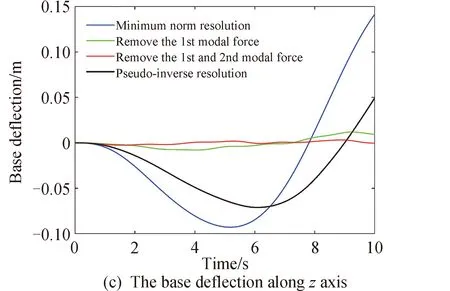
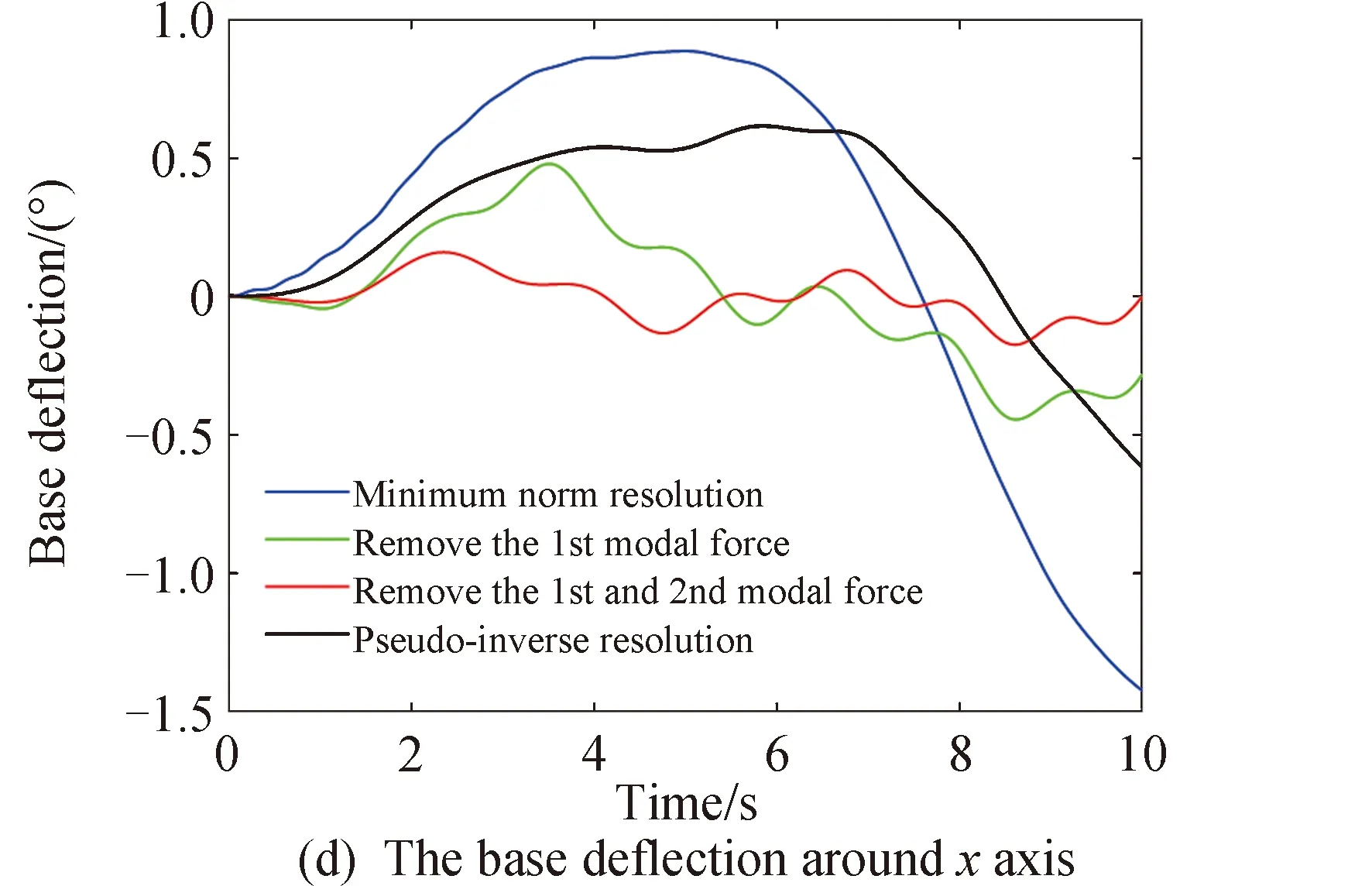
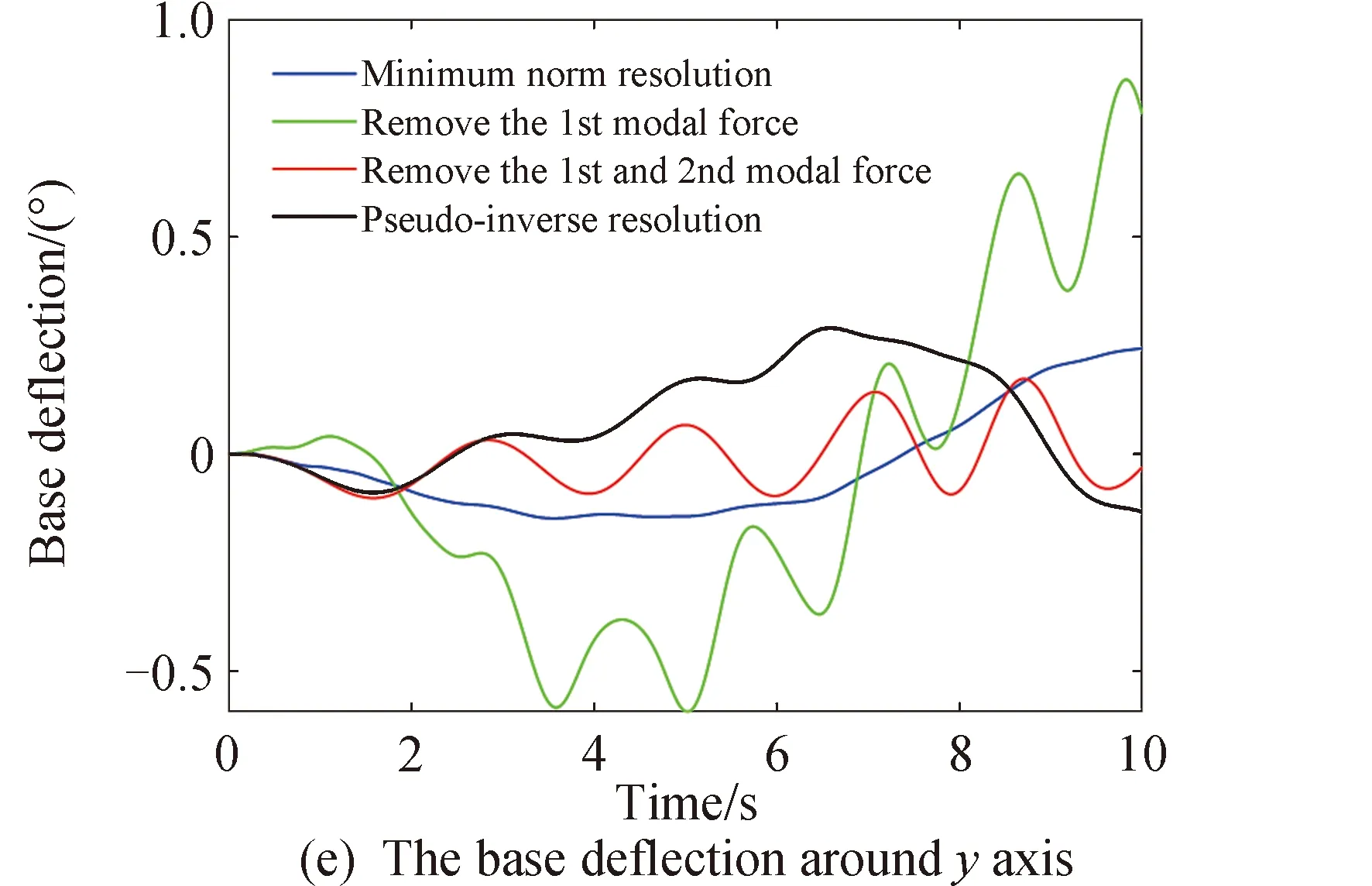
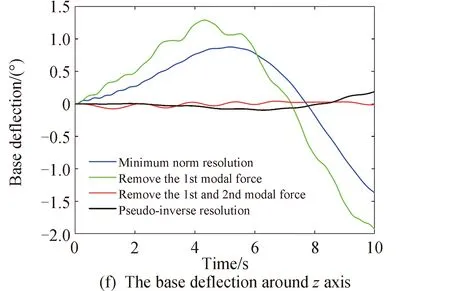
圖7為不考慮冗余解的情況,圖8和圖9分別為消除第一階模態(tài)力和前二階模態(tài)力的結(jié)果,圖10為微機(jī)械臂運(yùn)動(dòng)激起的基座振動(dòng),圖11為柔性基座的6階固有頻率,圖12為消除前二階模態(tài)力的末端軌跡曲線。
由圖10可見(jiàn),消除第1階模態(tài)力并不能明顯抑制基座的振動(dòng),而消除前兩階模態(tài)力抑振效果更加明顯。原因在于基座的前兩階固有頻率較小,且相差不大,因此前兩階模態(tài)是影響基座振動(dòng)的主要因素。盡管基座的剛度矩陣不變,由于機(jī)械臂構(gòu)型的改變會(huì)引起基座慣性矩陣Hb(xb,θ)的改變,因此系統(tǒng)的固有頻率也相應(yīng)變化,由圖11知基座各階固有頻率的變化范圍不大,且前3階固有頻率變化極小,也說(shuō)明對(duì)于時(shí)變的系統(tǒng)采用準(zhǔn)靜態(tài)的方法獲取瞬時(shí)模態(tài)特性誤差較小。
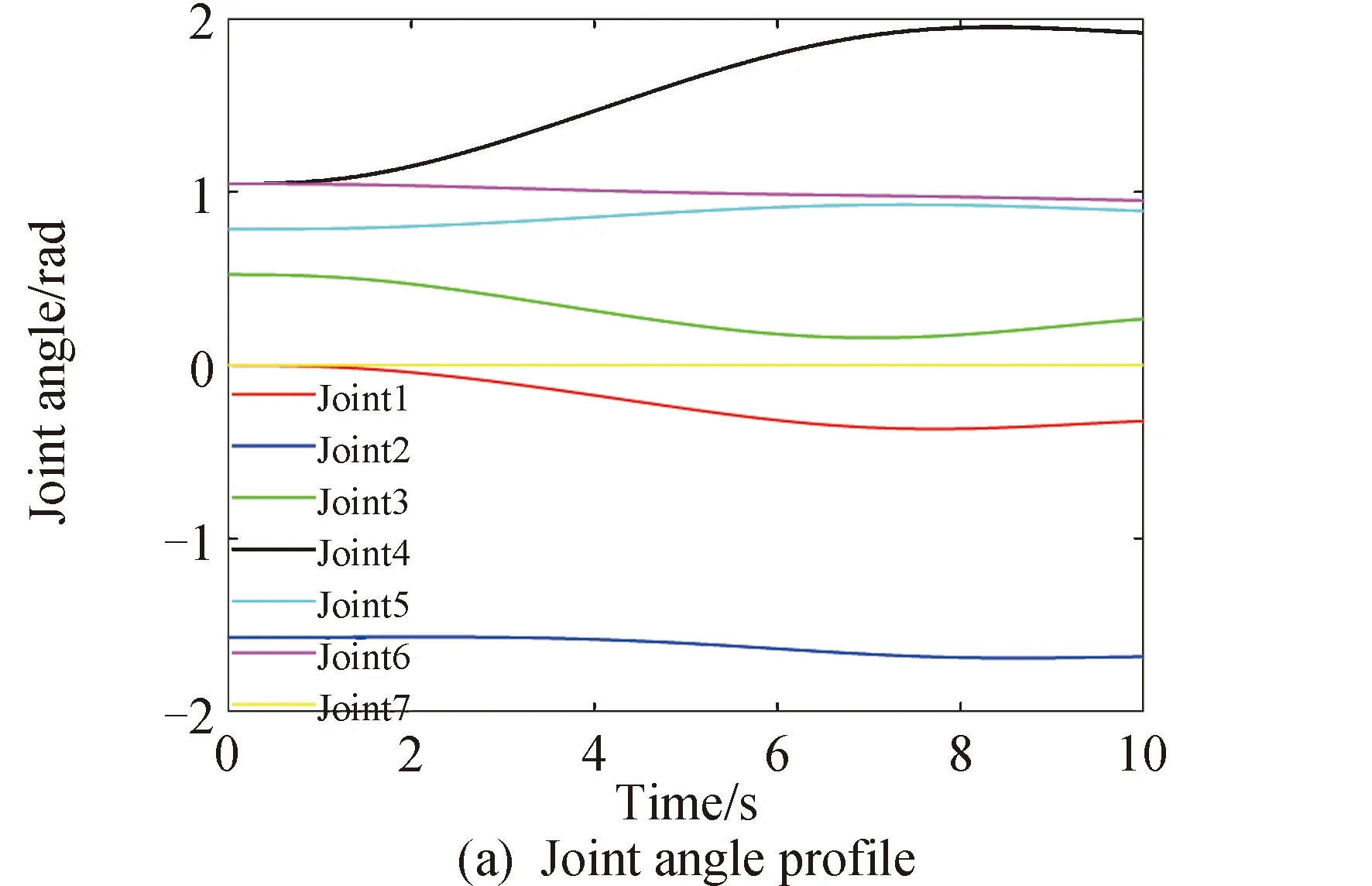

圖7 最小范數(shù)運(yùn)動(dòng)控制Fig.7 Motion control of minimum norm
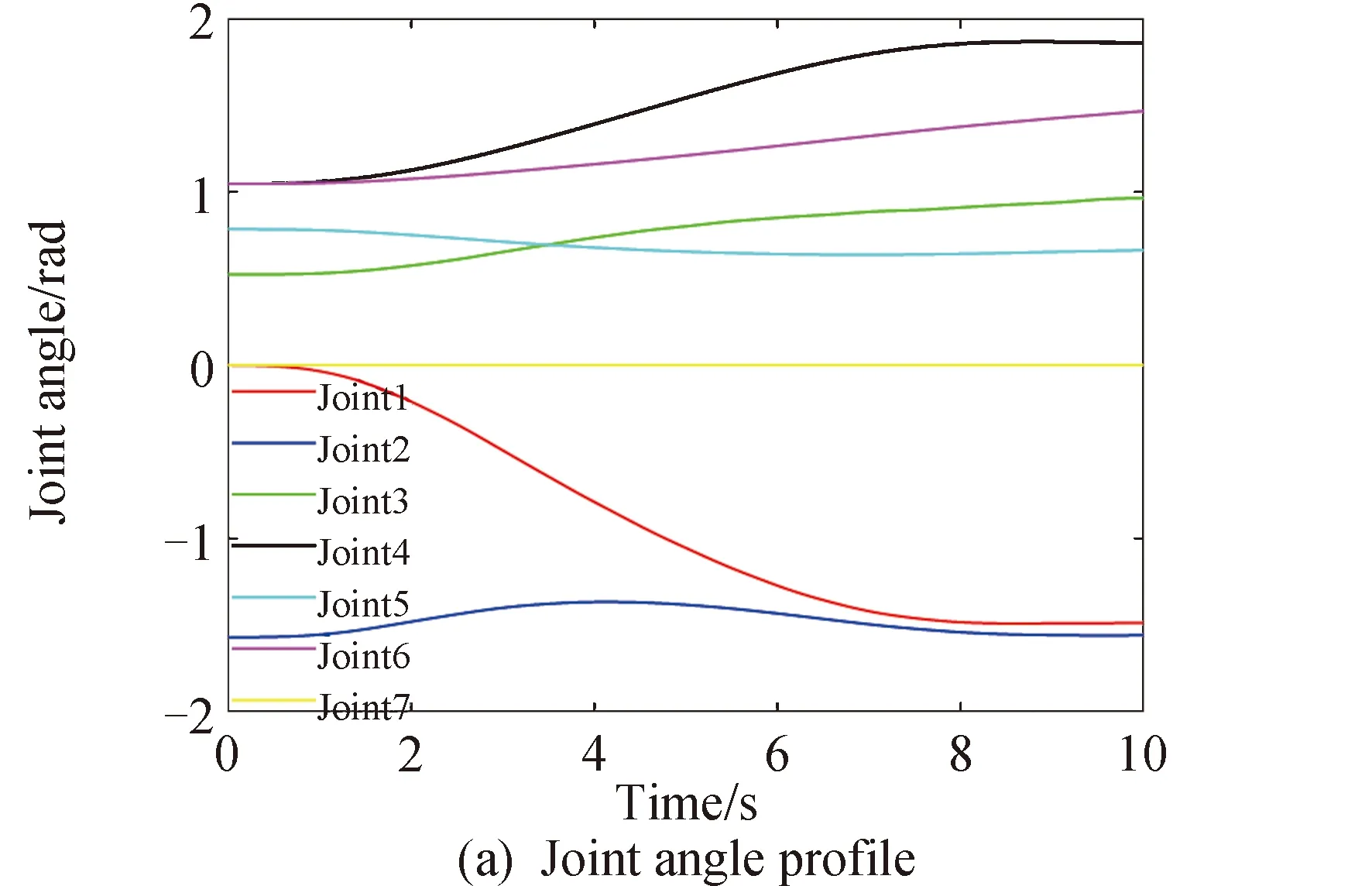
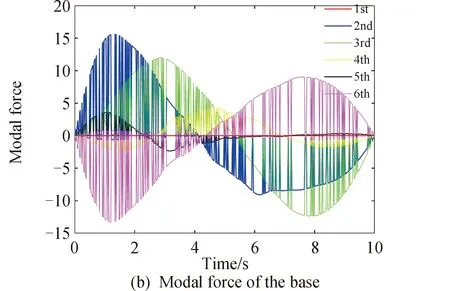
圖8 基于自運(yùn)動(dòng)消除第一階模態(tài)力Fig.8 Nullifying the first modal force utilizing

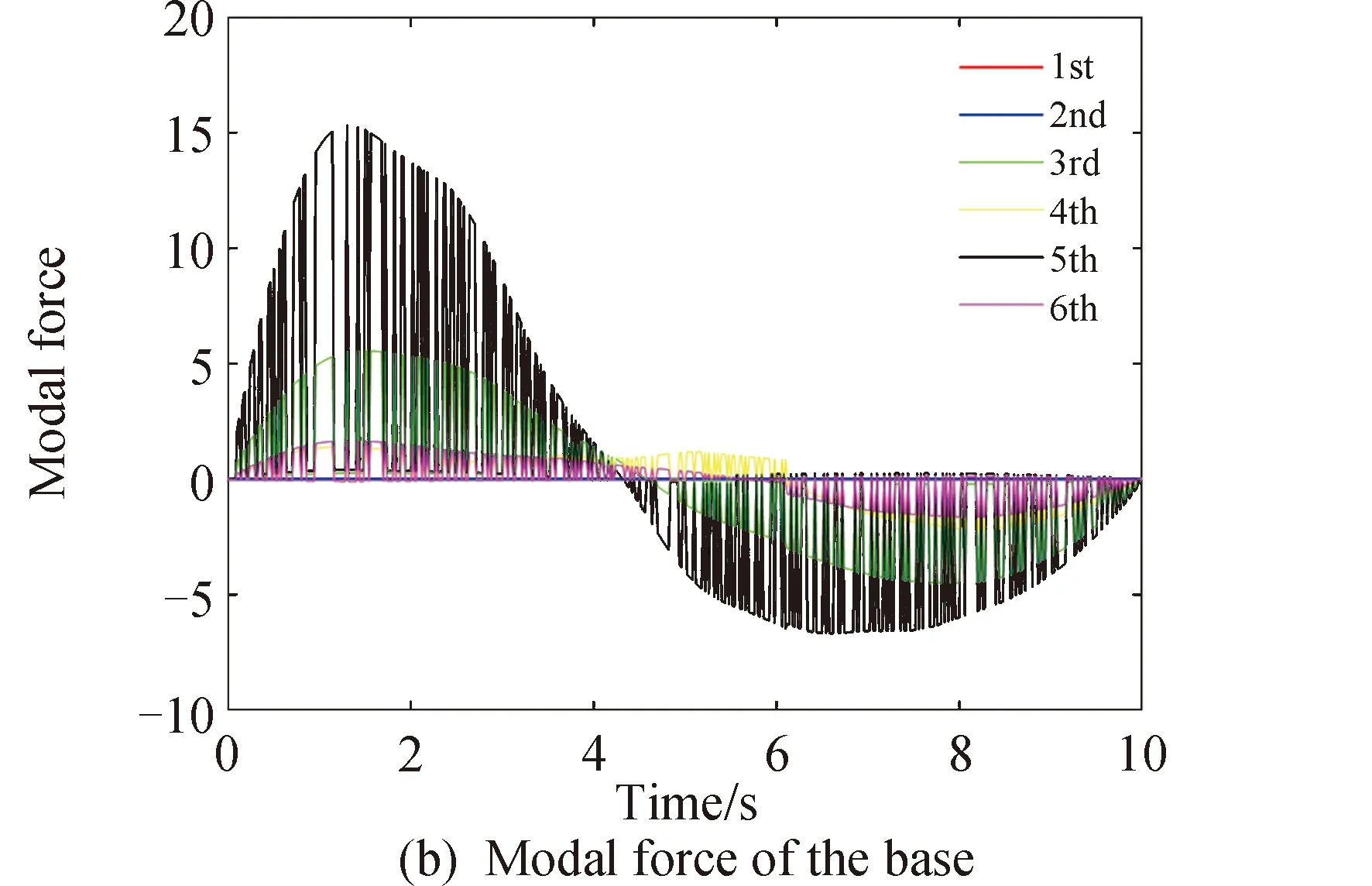
圖9 基于自運(yùn)動(dòng)消除前二階模態(tài)力Fig.9 Nullifying the first and second modal force utilizing self-motion
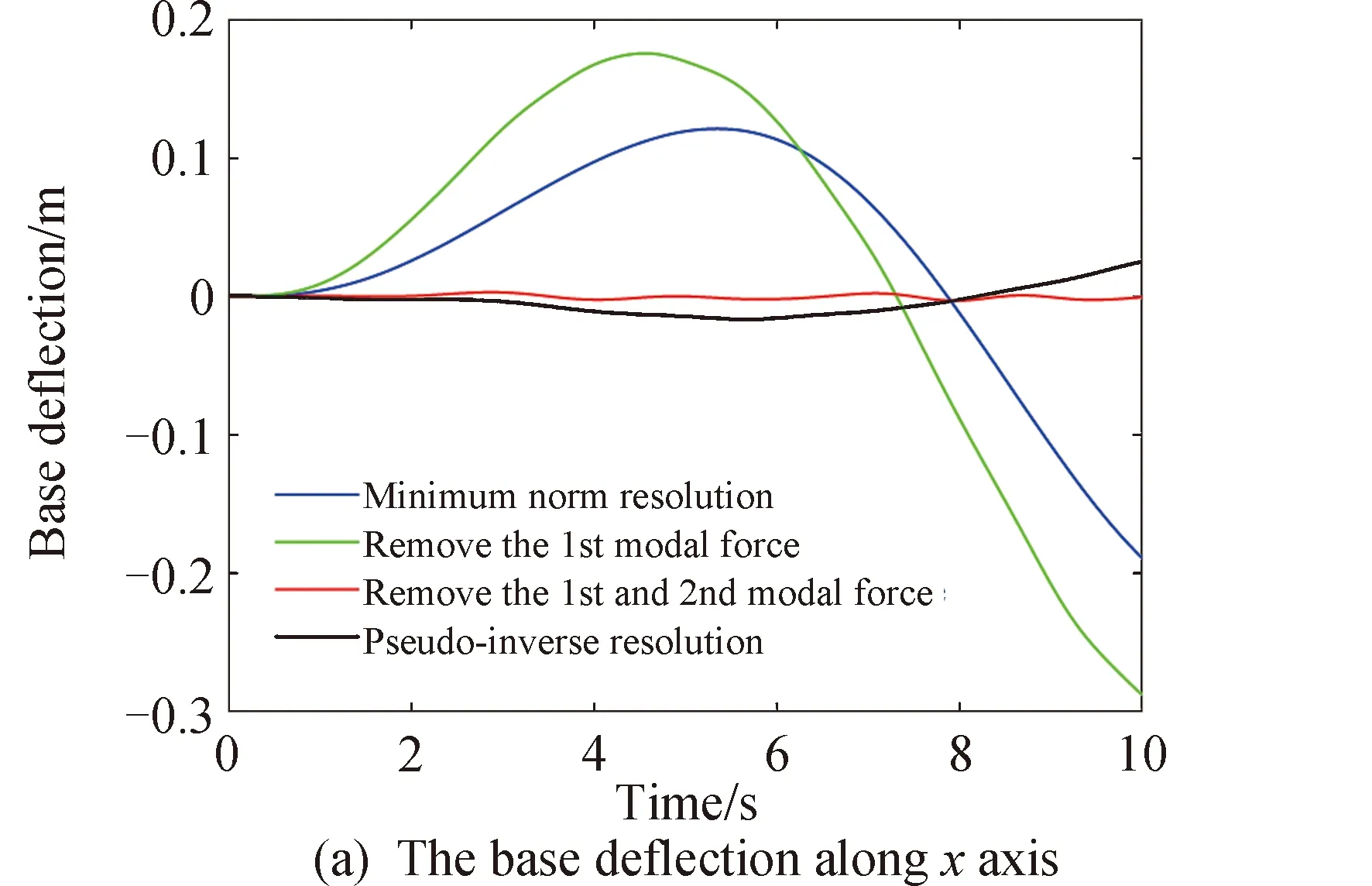
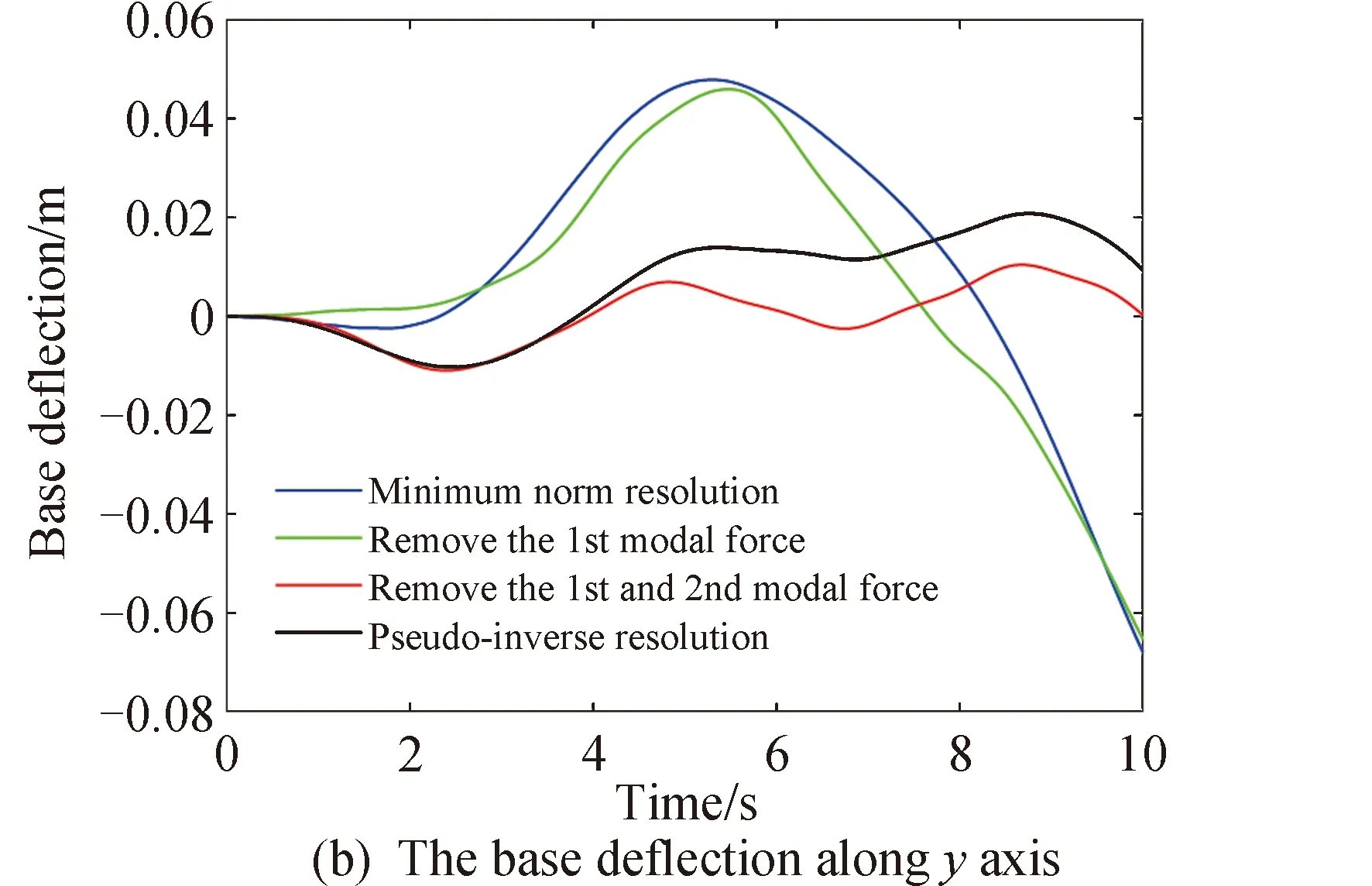
圖10 基座各方向振動(dòng)位移Fig.10 Vibration comparison of base in all directions
續(xù)圖10Fig.10 Continued
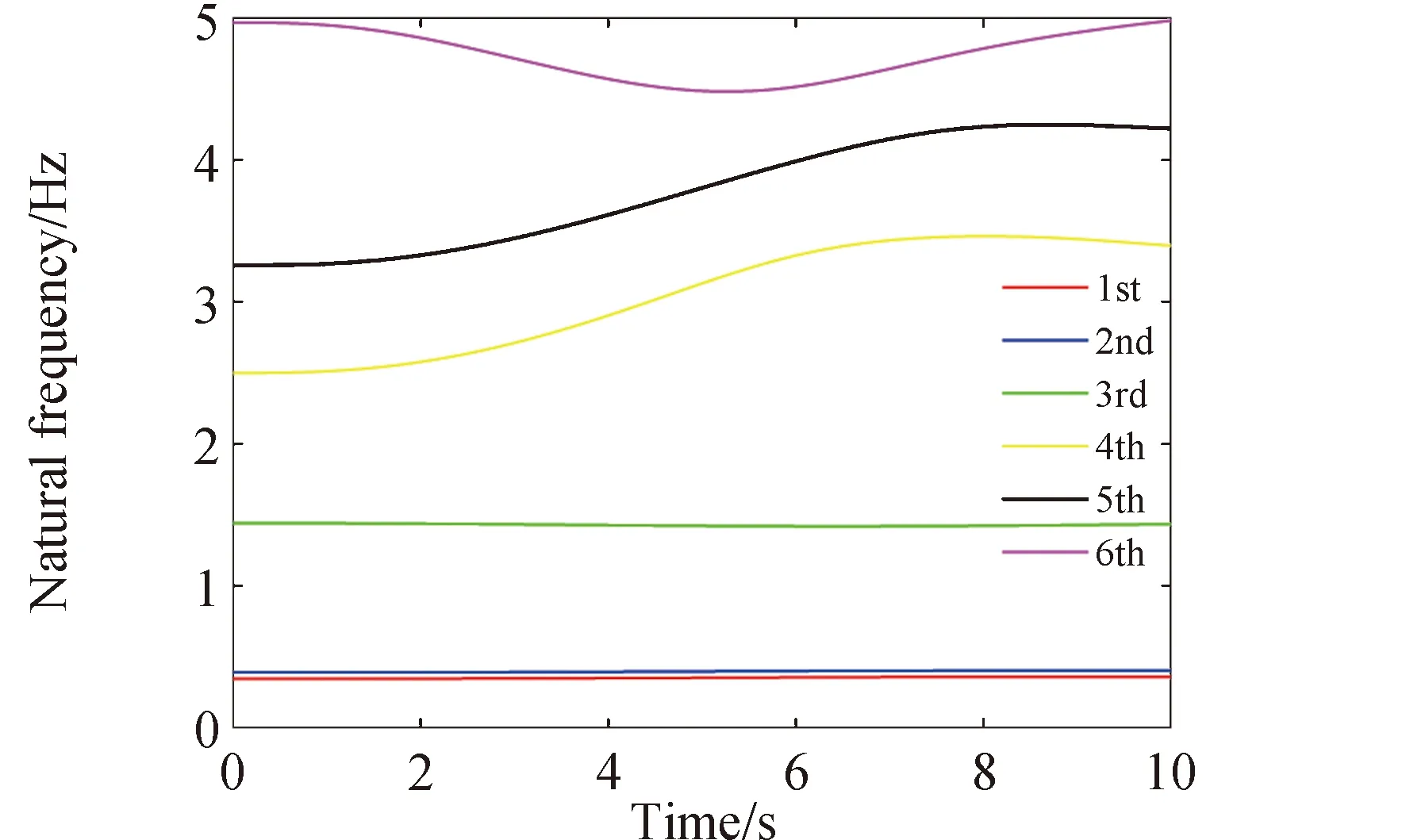
圖11 柔性基座各階固有頻率Fig.11 Natural frequencies of flexible base
由仿真結(jié)果知,利用冗余機(jī)械臂自運(yùn)動(dòng)消除前2階模態(tài)力的方式比傳統(tǒng)的反作用優(yōu)化控制方法效果更好,x軸、y軸、z軸的最平動(dòng)位移與最大轉(zhuǎn)動(dòng)位移分別降低了88%、50%、96%、72%、40%、60%。另外,當(dāng)剛性微機(jī)械臂的跨度比較大時(shí),柔性基座的轉(zhuǎn)動(dòng)位移比平動(dòng)位移對(duì)微臂末端的精度影響更大。低階模態(tài)力是引起柔性結(jié)構(gòu)振動(dòng)的最主要因素,因此當(dāng)微機(jī)械臂運(yùn)動(dòng)產(chǎn)生的低階模態(tài)力消除后,剩余的高階模態(tài)力引起的彈性變形量會(huì)很小。當(dāng)機(jī)械臂冗余度足夠高時(shí),即冗余度不小于柔性基座自由度,理論上可實(shí)現(xiàn)零反作用運(yùn)動(dòng)控制。
5 結(jié)論
利用機(jī)械臂的冗余特性進(jìn)行基座反作用優(yōu)化是一種行之有效的方法,本文針對(duì)柔性基座冗余機(jī)械臂的運(yùn)動(dòng)控制問(wèn)題,提出一種新算法,該算法對(duì)機(jī)械臂自運(yùn)動(dòng)矢量?jī)?yōu)化設(shè)計(jì),從而消除機(jī)械臂在運(yùn)動(dòng)過(guò)程中產(chǎn)生的低階模態(tài)力,由于低階模態(tài)力是引起結(jié)構(gòu)振動(dòng)的主要因素,因此抑振效果明顯。同時(shí)將該算法成功應(yīng)用于真實(shí)的空間柔性基座機(jī)械臂中,相比于傳統(tǒng)的反作用最優(yōu)控制算法,柔性基座沿各自由度的最大振幅分別降低了88%、50%、96%、72%、40%、60%。對(duì)柔性基座的振動(dòng)抑制不僅能提高微機(jī)械臂末端的操作精度,還能降低柔性基座因振動(dòng)造成的疲勞損傷的風(fēng)險(xiǎn)。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44