基于人體紅外傳感器的大型車輛盲區預警系統設計
2023-05-23 12:57:28陳嵐趙竹吳歡劉霽霆曾浩然
無線互聯科技 2023年6期
陳嵐 趙竹 吳歡 劉霽霆 曾浩然

作者簡介:陳嵐(1983— ),女,湖南長沙人,講師,碩士;研究方向:智能交通,交通控制,交通工程。
*通信作者:趙竹(1981— ),男,湖南長沙人,副教授,碩士;研究方向:智能交通,網絡通信,視頻監控。
摘要:大型車輛由于車身長、軸距長等特點,導致其在行駛過程中存在嚴重的視覺盲區。車身越長,轉彎形成的內輪差就越大,盲區也就越大,因此給行車安全帶來巨大的隱患。文章設計了一套低成本盲區預警系統,采用三級混合報警系統,將人體紅外傳感器、語音報警器、地面投影器、聲光報警器融合,實現多方位盲區檢測,達到“車避人”+“人避車”的效果,很好地解決盲區問題,大幅提高駕駛的安全性。
關鍵詞:大型車輛盲區;三級混合報警系統;行人檢測
中圖分類號:TP929 文獻標志碼:A
0 引言
隨著中國貨運行業的發展,貨運車輛大型化趨勢非常明顯,因車輛盲區引發的事故數不勝數,特別是雨霧天、夜晚、右轉彎等視野欠缺情況下,給行車安全造成極大隱患。因此,設計一種大型車輛的盲區監測系統對提示交通安全具有重要意義。現有盲區檢測系統均采用“車避人”方式防止盲區交通事故,且存在一定技術缺陷。本文提出的大型車輛盲區預警系統采用“車避人”+“人避車”原理,可以較好地解決這個問題。
1 車輛盲區問題分析
據《2020年交通運輸行業發展統計公報》統計,2020年全國大型車輛擁有量達到2 281.79萬輛[1]。大型車輛所導致的交通事故也在逐年增加,在涉及車輛發生的惡性交通事故中,盲區引發的事故高達70%,致死率超過90%[2]。分析可知,事故原因主要有 :大車司機的視線存在盲區導致其未能及時發現盲區內的非機動車、行人;非機動車及行人對大型車輛右轉盲區范圍判斷有誤造成的誤入;大型車司機駕車過程中的車速過快及疏忽大意問題。
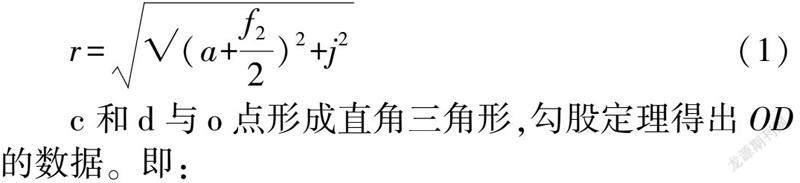
大型車輛在右轉彎時產生的內輪差導致巨大的視覺盲區。內輪差是在車輛轉彎過程中前后內輪轉彎半徑的差值,與車長、輪距、最小轉彎半徑3個因素有關[3]。根據內輪差模型(見圖1),A、B、C、D為4個輪的行駛軌跡。
半掛式貨車內輪差的計算推導:
abo為直角三角形,oa為車輛最小轉彎半徑,ab=cd為軸距,根據勾股定理可得:
c和d與o點形成直角三角形,勾股定理得出OD的數據。即:
式中:j為牽引銷與牽引車后軸的距離; r為牽引銷的運動半徑; c為掛車內側后輪中心線的運動半徑; n′為半掛車輛的內輪差(單位均為m)。
非掛式貨車內輪差計算公式:
其中d1表示前輪的外輪的弧度半徑,d2表示內輪的弧度半徑,d1d2表示兩輪弧度半徑的比值。
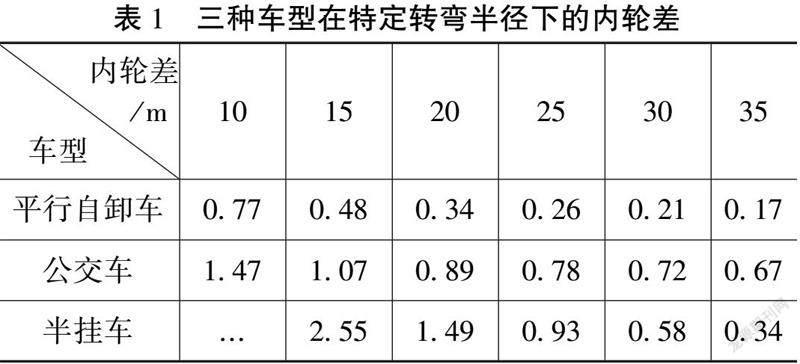
以重型貨車、公交車和半掛汽車列車為例,分別計算沿特定半徑道路中心線轉彎時產生的內輪差。其中車型分別選取一汽平頭柴油自卸汽車CA3071P9K2AE、宇通公交車ZK6891HG和一汽半掛牽引車CA4260P66K2T1A作為代表。計算后的內輪差范圍大小如表1所示。
根據以上結果 ,半掛車的寬度為2.5 m,車道寬度為3.5 m,當半掛車沿著25 m半徑圓弧轉彎時,所產生的內輪差極易侵入內側的車道,而行人與非機動車很難準確判斷自身是否進入大型車右轉盲區。
對此交警部門做出很多處理方式,如針對右轉內輪差盲區提出的右轉必停標志、右轉危險區域提示、雷視一體機路口監測等。這些措施能夠一定程度上減少事故發生,但都存在一定的缺陷。
“右轉必停標志”是交警部門針對盲區問題做出的相關法規[4],要求所有大型車輛駕駛員右轉必停,即車輛在路口右轉或者行經右轉渠化匝道時,自覺停到兩米線外進行觀望,在滿足道路安全情況下,才能進行右轉通行。這讓大型車輛因右轉彎導致的事故大幅下降。但其背后也有缺點,如不斷啟停會增加油耗、駕駛員不可能同時進行前、左、右盲區的觀察、停車后不能避免還會有人進入盲區。
“右轉危險區域提示”使用紅色油漆將內輪差盲區漆紅,變成一個醒目的區域警示非機動車和行人,達到自覺避開“右轉危險區”的效果。同時也存在一定的缺陷,如無法避免行人、非機動車不守交通規則,駕駛員在危險區域前沒有停車眺望直接駛過等危險。
除此之外,市面上還有針對盲區研發的技術解決方案,常見的有雷達、360°車輛全景影視、渣土車主動剎車系統等,也都存在一定缺陷。
雷達:探測聲波存在太窄的現象,障礙物一旦偏離雷達探頭的正對角度時,多數存在較大的探測盲區,對管狀、錐狀等特殊障礙物存在較多的死角。因車輛行駛過程中的環境十分復雜以及各種極端天氣的影響,導致雷達對障礙物的識別存在一定的誤差概率。
智能車載360度全景環視系統:通過視頻監控提醒大型車輛駕駛人注意避開行人,而大型車輛駕駛人有時不會及時地注意觀察監控屏,所以解決盲區的能力較弱。
渣土車盲區主動剎車系統:只有在車速15 km/h以下才會自動觸發。
以上大貨車盲區問題的方式都是從駕駛員的方面去考慮,以達到“車避人”效果。目前,針對進入盲區的非機動車、行人主動提醒等方面還處于技術空缺階段。
2 系統設計
本文提出的系統是專門針對大型車輛盲區以及內輪差這一危險地帶的解決方案,系統的檢測單元與警示單元通過信息傳播媒介(微處理器)進行信息交換和通信,以實現檢測與報警功能。主要核心部件為人體紅外傳感器、語音報警器、聲光報警器、地面投影器。STM32單片機運行三級混合報警系統做出決策,當行人進入設定的預警區域時,觸發三級混合報警系統對行人以及駕駛員進行預警。報警單元內的地面投影儀、聲光報警器以及語音播報器可以單獨使用,也可以混合報警,既可以自動調試,也可以手動操作。達到“車避人”+“人避車”的效果。
2.1 設備選取及安裝
2.1.1 人體紅外傳感器安裝
大型車輛因A柱及車身遮擋產生多個盲區,為解決這些盲區問題,布置2顆人體紅外傳感器于車前保險杠后。針對轉彎盲區,布置2顆人體紅外傳感器于駕駛艙間橫梁處。人體紅外傳感器最遠的探測距離約為12 m,探測角度為錐角120°~180°可調。通過4顆人體紅外傳感器覆蓋車身,達到監測目的,如圖2所示。安裝過程采用卡接式,探頭部位朝外。具體傳感器數量依據盲區大小進行配置。
2.1.2 地面投影儀安裝
大貨車的內輪差通常可達1.5~2 m,投影儀投射距離約為6 m。經過大量測試,采用鈍角三角形的投射方式,將投影器安裝至內輪差的頭部(前轉向輪附近),離地0.8~1.2 m,安裝角度與車身成15°夾角斜向下,達到警示盲區效果。
2.1.3 語音播報器安裝
距離每增加1倍時,聲壓會減少6 dB。通過測試,語音播報器的分貝為120 dB,街道環境聲音為70 dB左右,因此在內輪差盲區的起點,高度為1.8 m處安裝語音播報器可以更好使警報傳播到人耳。
2.1.4 聲光報警器安裝
為引起非機動車、行人注意,警報器通過安裝至車頂處。在緊急情況下發出警報聲,不斷閃爍強光,提醒盲區內的非機動車、行人迅速退出盲區,避免事故發生。
2.1.5 微處理單元安裝
微處理單元是本系統最重要的部件,為避免暴曬、潮濕等危害,須進行特殊的安裝保護,安裝在駕駛室中控臺內,根據情況找到固定點,并固定牢固。
2.2 系統功能分析
2.2.1 監測系統
監測系統由人體紅外傳感器負責[5]。通過紅外傳感器的探頭探測人體體溫恒定所釋放的紅外線,人體紅外傳感器所連接的電路通過對電荷進行檢測就能識別是否有人在此區域,從而達到探測盲區的效果。
2.2.2 報警系統
當監測單元感應到車輛盲區內有人,則將信息傳輸至微處理單元。微處理單元經過對監測單元信息的采集及處理,進而發送指令控制警示單元中的聲光報警器、語音報警器和地面投影器進行大型車輛盲區預警提示。具體工作方式為:地面投影器投影出車輛盲區的范圍,并標注字體“車輛盲區,請注意避讓!”;聲光報警器進行紅、綠、藍燈光的交替閃爍,聲光報警器結合語音警報器,在車內外進行燈光交替閃爍的同時發出蜂鳴聲警示周圍非機動車與行人。
2.2.3 決策系統
決策系統由三級混合報警系統進行判斷。將語音報警器、聲光報警器、地面投影器,結合多傳感融合技術進行處理。進行大量實驗,結合報警器可調節功能設計的三級報警方案,分別對應的音量分貝、報警頻率均不相同,如圖3所示。
通過監測系統、報警系統、決策系統三大系統結合對大型車輛盲區進行實時保護,達到“車避人”+“人避車”雙重保障效果。
3 結語
本文提出的大型車輛智能盲區預警系統利用人體紅外傳感器、語音報警器、聲光報警器、地面投影器高靈敏度傳感器組合,實現多方位盲區檢測,達到“人避車”+“車避人”效果。通過產品的測試以及逐步投入市場,使用效果證明該系統具有可靠性強、成本低的優勢,適用于各類大型車輛,可以很好地解決大型車輛的盲區安全問題。
參考文獻
[1]交通運輸部.2020年交通運輸行業發展統計公報[J].交通財會,2021(6):92-97.
[2]劉啟明.基于車輛碰撞事故反求的腦損傷評價研究[D].長沙:湖南大學,2018.
[3]徐令選.大型車右轉盲區形成機理及防治措施研究[D].天津:河北工業大學,2017.
[4]交宣.創新管理措施防范大貨車右轉盲區致禍[J].道路交通管理,2021(10):14-16.
[5]周湘峻.熱釋電人體紅外傳感器及其應用[J].電子技術應用,1994(4):45-46.
(編輯 傅金睿)
Abstract: Large vehicles due to the long body, wheelbase and other characteristics, resulting in serious visual blind spots in the driving process. The longer the vehicle body is, the larger the inner wheel difference formed by turning, and the larger the blind spot is, thus posing a huge hidden danger to driving safety. This paper designs a low-cost blind zone warning system, using a three-stage hybrid alarm system, integrating human infrared sensors, voice alarms, ground projectors, and audio and visual alarms to achieve multi-directional blind zone detection, achieving the effect of “car avoiding people” + “people avoiding cars”. Effect, a good solution to the blind spot problem, significantly improve the safety of driving.
Key words: blind zone of large vehicles; three-level hybrid alarm system; pedestrian detection
