基于縮尺試驗的聯絡通道機械法施工監測研究
2023-05-26 06:03:06鄭詩怡鄭榮躍楊佳棟鄧岳保朱瑤宏
寧波大學學報(理工版) 2023年3期
鄭詩怡, 鄭榮躍, 楊佳棟, 鄧岳保, 朱瑤宏
基于縮尺試驗的聯絡通道機械法施工監測研究
鄭詩怡, 鄭榮躍*, 楊佳棟, 鄧岳保, 朱瑤宏
(寧波大學 濱海城市軌道交通協同創新中心, 浙江 寧波 315211)
機械法聯絡通道作為一種新興的地下結構施工方法, 開展監測技術研究對其安全施工具有重要的意義. 針對目前工程中監測目標集成度不夠、信息化程度不高的問題, 以寧波地鐵機械法聯絡通道項目為基礎, 提出了一套完整的聯絡通道施工安全在線智能監測系統. 該系統分為應用層、傳輸層、感知層三個部分, 并且具有采樣、存儲、傳輸、數據處理和預警功能. 通過開展縮尺模型試驗, 測試了聯絡通道掘進過程中的變形及應力發展規律, 并檢驗了監測系統的可靠性. 試驗結果表明該系統可實現實時監測、無線傳輸等目標, 滿足實際工程的監測需求, 可進一步推廣至實際工程.
聯絡通道; 機械法施工; 無線監測; 縮尺模型試驗
地鐵作為城市軌道交通的重要組成部分, 以安全、綠色、便捷等優勢, 成為了緩解交通壓力、減少出行時間的重要交通工具. 統計結果顯示, 截至到2021年底, 全球共有79個國家和地區的541座城市開通了城市軌道交通, 運營里程達到了36854.20km[1]. 地鐵聯絡通道作為城市軌道交通兩條單線區間隧道之間的(長度大于600m)[2]消防安全逃生通道, 是軌道交通工程的重要組成部分. 聯絡通道機械法施工技術作為一項新型工法, 相關研究正逐步深入, 但其施工監測方法仍處于探索階段.
在地鐵主隧道的施工監測方面, 劉志鋒等[3]基于GRP5000移動式三維激光掃描儀對隧道橢圓度進行了監測分析; Che等[4]采用高精度光纖傳感技術, 對波紋鋼公用工程隧道力學性能進行了監測研究; Ye等[5]研究了低頻瞬態電磁雷達系統的原理, 并將其應用在地下管道和空洞檢測中. 以上研究只在監測技術方面進行改進, 仍要監測人員進入隧道內部進行監測, 存在監測效率不高等問題, 需進行智能化改進.
在現有地下結構的智能監測方面, Javier等[6]針對機器+活動識別和威脅監測兩方面, 提出了一種新型的基于光纖的管道完整性威脅預防監測系統; Liu等[7]提出了一種施工聲音監測系統, 收集了電錘、切路機、挖掘機破碎錘的施工聲以及環境噪聲, 以防止施工造成的地下管道損壞; 張利文[8]提出了一種利用傾角傳感器監測盾構隧道縱向沉降的新方法, 完成了測量系統的研究設計, 能實現遠程監測隧道縱向沉降曲線, 有較高的測量精度, 并且經濟成本低; Wang等[9]監測了西安幸福臨戴項目地下裂隙活動期的垂直地表沉降、結構應力、裂隙位移和接觸壓力等地下公用隧道結構的預警指標, 給出了安全控制值和預警標準; 周濟兵等[10]提出了一種基于事故情景的標準操作流程體系, 采用管廊狀態數據采集、分級分段層次風險評估、基于情景的分段應急檢索和多級應急響應, 實現了事前預防、事中快速響應的目標; 肖麗等[11]通過數值模擬和室內試驗, 設計了一套基于LES的多功能盾構隧道風險可視化預警試驗系統, 該系統可實時監測結構的橫向直徑收斂變形和管片轉角這兩項橫向變形指標, 并可視化地顯示結構在各種指標下的安全等級. 雖然以上研究取得了豐碩成果, 但是依然存在不同監測目標之間的集成度不夠等問題.
在機械法聯絡通道的施工監測方面, 李淑強等[12]以青島地鐵8號線某區間隧道為工程依托, 闡述了機械法聯絡通道施工質量管理體系, 并開展了現場沉降監測分析; 梅清俊等[13]以寧波地鐵3號線某聯絡通道工程為研究對象, 通過監測分析研究了機械法聯絡通道T接施工技術對周圍地層、主隧道結構等的施工影響; 楊佳棟等[14]基于縮尺模型試驗對機械法聯絡通道T接部位接收端切削洞口附近及主隧道變形、軸力、彎矩等變化規律進行了研究; 胡威等[15]依托杭海城際線余杭高鐵站—許村鎮站區間隧道機械法聯絡通道工程, 采用現場實測、理論分析和有限元模擬等方法, 研究了機械法聯絡通道開挖對T接部位隧道結構及地表變形的影響. 目前對機械法聯絡通道施工技術的研究多集中于隧道管片結構、隧道對周圍環境沉降等方面, 尚未形成一套系統體系來準確測量分析隧道之間、隧道與土之間以及隧道與周圍環境之間的影響.
綜上所述, 對于機械法聯絡通道施工中如何集成監測項目, 提高監測精度, 減少人工, 已成為亟待解決的問題. 為此, 本文以寧波地鐵機械法聯絡通道工程為基礎, 利用縮尺模型試驗, 提出一套完整的機械法聯絡通道施工安全在線智能監測系統, 并檢測該系統的有效性, 為相關施工安全智能監測提供參考.
1 模型試驗與監測方案
1.1 試驗概況
以寧波軌道交通3號線某區間機械法聯絡通道為基礎, 設計了一套縮尺試驗模型, 主要包括模型試驗箱、盾構掘進機以及監測系統三部分. 模型試驗采用13環主隧道管片拼接, 如圖1所示.
模型隧道管片外徑為600mm, 內徑為520mm. 中間3環為切削環, 管片長為150mm. 中間3環兩邊各對稱布置5環管片, 為標準環, 管片長120mm. 模型試驗示意和照片分別如圖2和圖3所示. 當盾構機對管片進行切削時, 會引起洞口附近的管片產生較大的應力, 嚴重時可能產生變形、裂縫等, 所以在此范圍進行重點監測. 中間5環為主要受影響環, 由于管片為對稱布置, 所以試驗主要針對中間第5、6、7環的收斂變形情況進行監測. 在前期試驗[14]中可以發現切削環上往往受到比較大的剪切力和頂推力, 這兩種力會產生較大的振動并使得結構產生傾斜. 因此, 需要在切削環上下布設傾斜監測傳感器對管片受力后的旋轉情況進行監測; 在洞口處以及其正后方管片上布設加速度監測傳感器, 監測盾構機切削過程中管片產生的振動及其耗散情況.
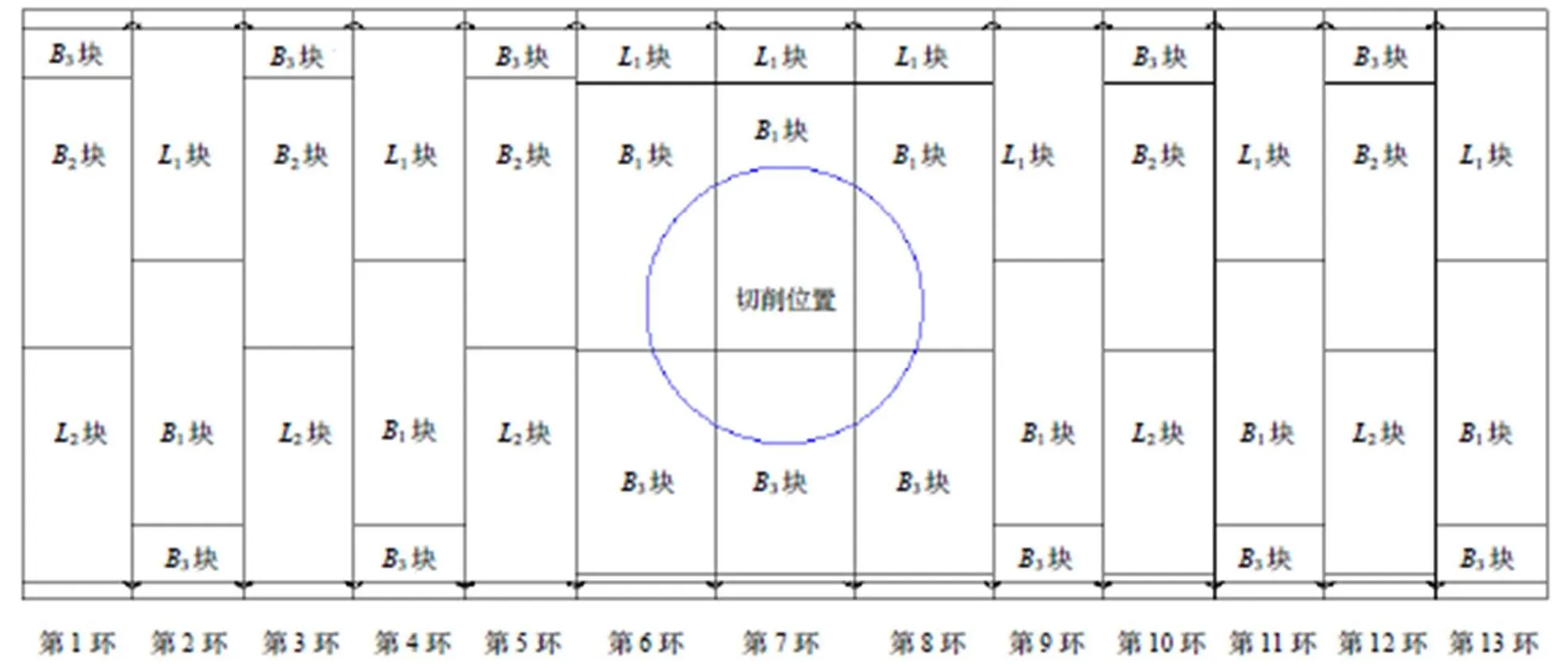
圖1 機械法聯絡通道主隧道示意
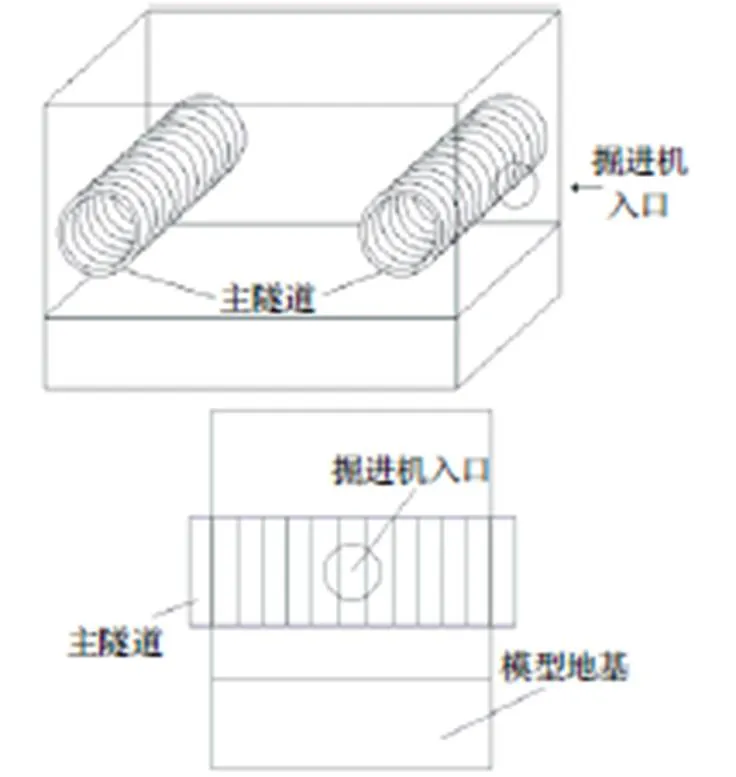
圖2 模型試驗示意

圖3 模型試驗照片
1.2 監測方案
監測系統基于無線傳輸技術原理組建, 分三部分: 感知層、傳輸層、應用層. 感知層是最基礎部分, 用于采集數據, 監測項目有應變監測、土壓力監測、位移監測、裂隙監測、孔壓監測、振動監測等, 具體監測內容見表1. 傳輸層主要用于網絡傳輸, 主要儀器為物聯網網關. 應用層主要用于數據接收、解析和展示.
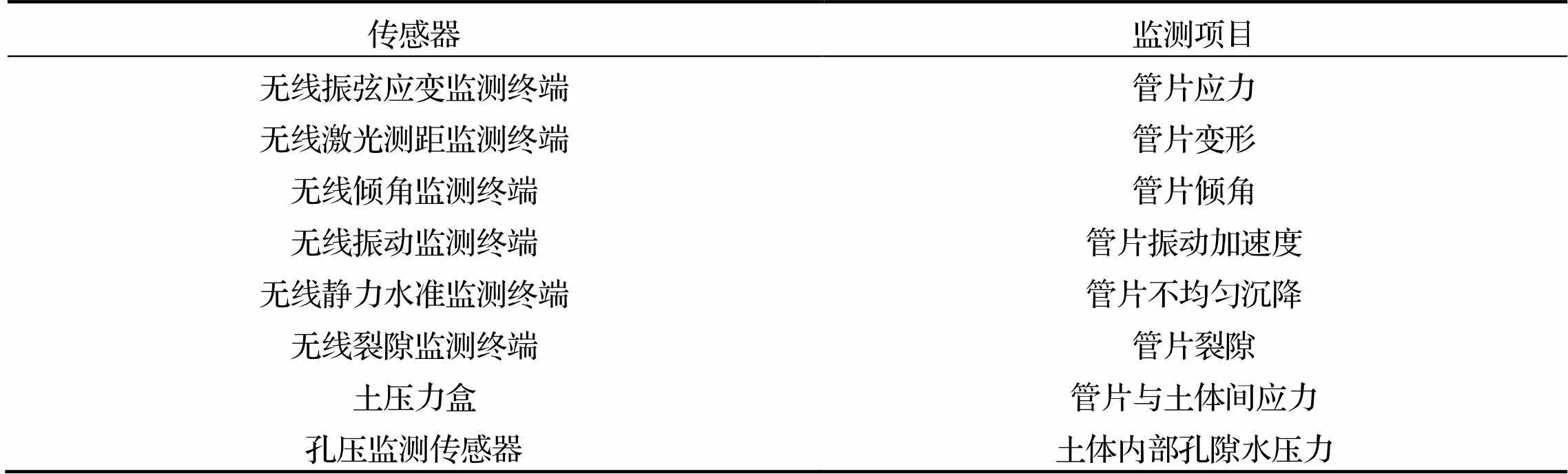
表1 監測內容
系統具有高性能的數據管理、計算能力, 支持隨時隨地在移動端查看數據. 系統架構如圖4所示. 無線傳感器終端按照設定的采樣時間間隙性工作. 終端數據上傳不成功時將緩存采集數據, 待網絡恢復后依據代價算法綜合評估, 篩選出最合適的設備加入其網絡并自動補發, 保證采集數據的完整性. 在接收數據后, 系統首先對數據進行預處理, 將4倍方差作為閾值, 過濾采集過程中由于傳感器自身或環境溫度、濕度等原因產生的異常數據, 以確保數據的可靠性. 同時系統會對不同采集器采集到的數據進行分類, 自動把數據轉換成動態的圖形, 通過可視化形式呈現在網頁上.
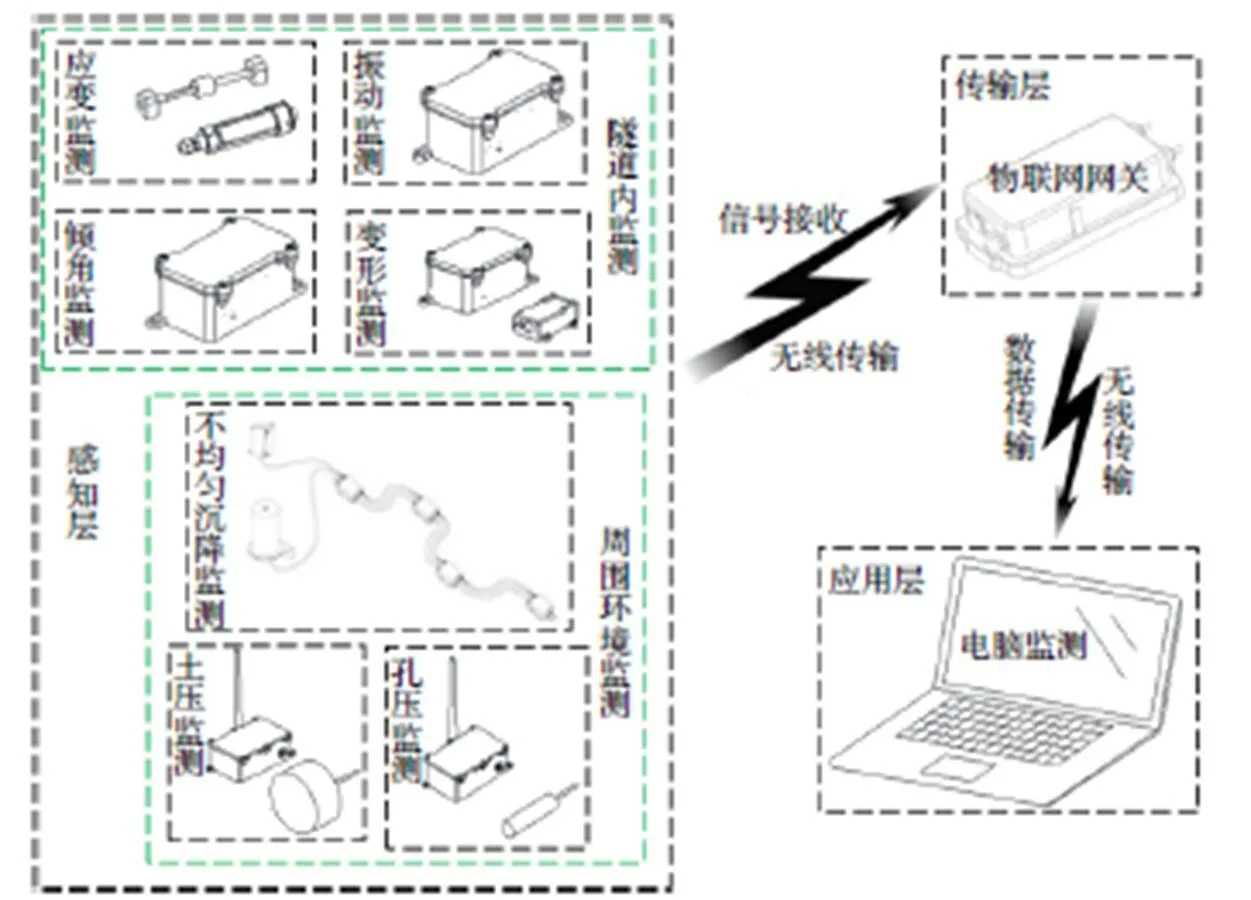
圖4 系統架構
系統還配有預警功能, 預警值根據不同部位監測的不同內容有針對性地進行設定. 系統預警等級與監測對象的風險等級相適應, 分為三級, 監測人員可根據不同的等級采取不同的防護措施. 預警值確定方法: 首先通過實際經驗或行業規范等獲得極限值, 然后將極限值加上一定的安全系數作為預警值[16]. 在監測前人為設定預警值, 平臺會自動將數據與預警值進行對比分析. 若采集值超過預警值, 平臺將以網頁或短信提醒方式發送相應預警等級.
1.3 傳感器布設
試驗主要對被切削主隧道的受力情況進行監測. 整條管片為拼接而成, 以第7環為中心, 對稱布置. 傳感器布設主要在第5、6、7環上, 布設情況如圖5、6所示. 其中1-1、1-2為應變傳感器, 布設在第6、7環管片的150°位置處, 監測切削過程中管片應力應變情況; 2-1、2-2、2-3、2-4為裂隙監測傳感器, 2-1、2-2布置在第5環的豎向與橫向位置, 監測隧道豎向和橫向變形, 2-3、2-4布置在第6、7環和第5、6環管片150°位置的接縫處, 監測切削環之間、標準環與切削環之間的裂隙發展情況; 3-1、3-2為傾角監測傳感器, 布置在第7環管片的0°和180°位置處, 監測切削過程中隧道傾斜狀況; 4-1、4-2為加速度傳感器, 布置在第6環管片的90°和270°位置處, 監測切削管片時產生的加速度.
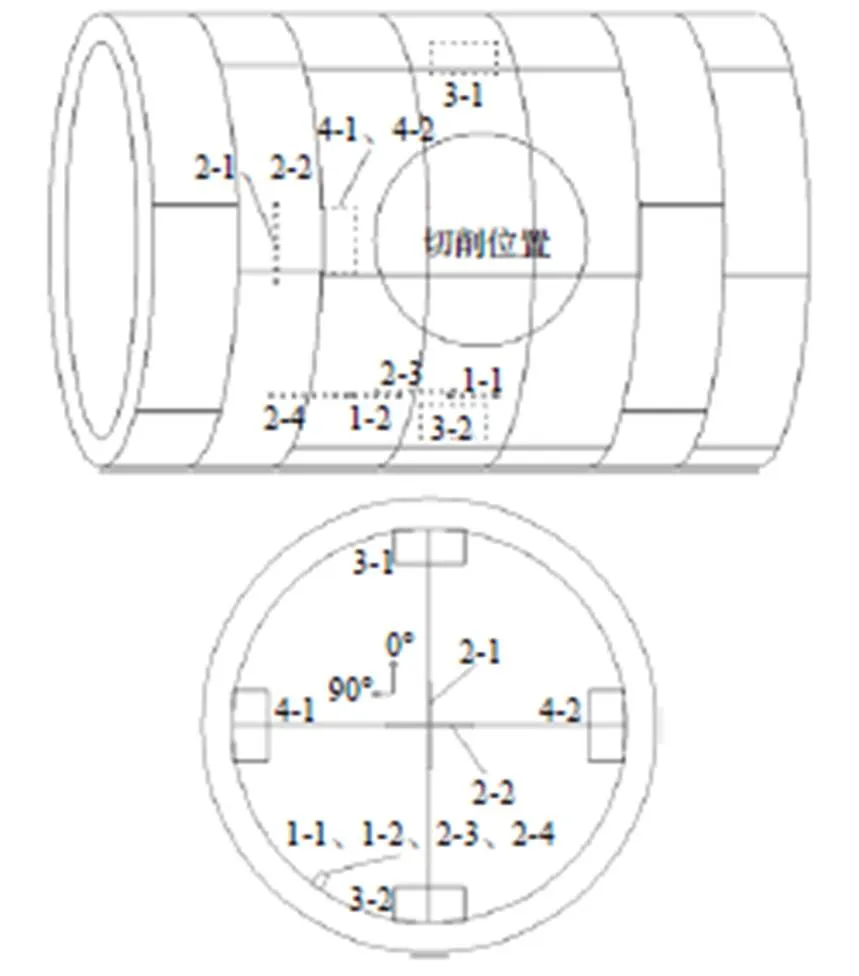
圖5 傳感器布設示意
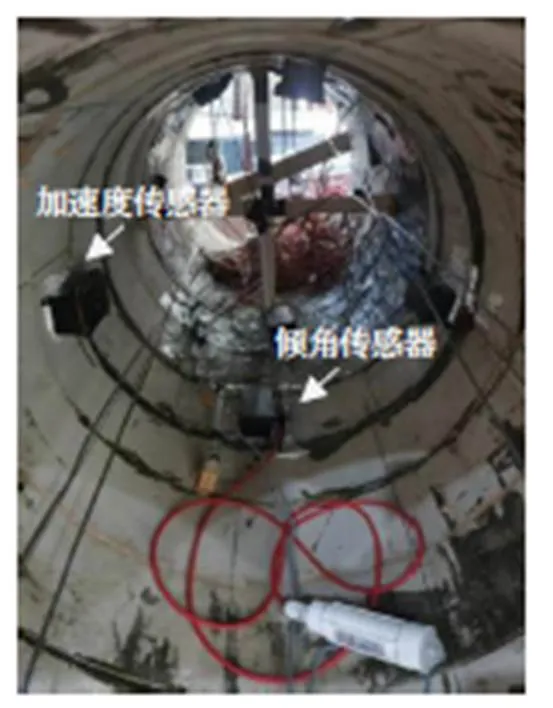
圖6 隧道內傳感器布設情況
2 試驗過程及分析
2.1 試驗過程
試驗對象主要選取中間第5、6、7環, 其中第5環為標準環, 第6環為半切削環, 第7環為完全切削環. 試驗分為四個階段:第一階段, 盾構機向前推進至與管片接觸; 第二階段, 盾構機切削管片至管片破洞前; 第三階段, 管片破洞, 盾構機繼續切削至整個刀頭完全貫穿管片; 第四階段, 盾構機繼續向前推進直至整個刀盤部位通過管片, 完成切削. 試驗總時長371min, 第一階段持續時間為67min, 其中盾構機向前推進至接觸到試驗箱持續時間為10min; 第二階段持續時間為164min; 第三階段持續時間為130min; 第四階段持續時間為10min. 圖7所示為主隧道破洞階段盾構機掘進情況.

圖7 主隧道破洞階段
2.2 試驗分析
(1)應力
整個切削過程應力變化情況如圖8所示, 其中224C(即1-1)布置在第7環上, 224D(即1-2)布置在第6環上. 可以發現圖中224C的應力增幅遠大于224D, 這是由于試驗中盾構機的頂推力主要作用于第6、7、8環上, 而整個隧道并不是一個整體, 是由一環環管片拼接而成, 使得應力向外傳播時環間衰減程度較大, 并且環內管片本身也有一定的衰減作用, 導致半切削環上的應力遠小于全切削環上的應力. 刀盤表面為弧面并布設有凸起的小刀片, 在刀盤切削時, 完全切削環首先受到頂推力, 待切削至122min, 半切削環開始受到刀盤切削, 此時半切削環上應力產生一個突增.
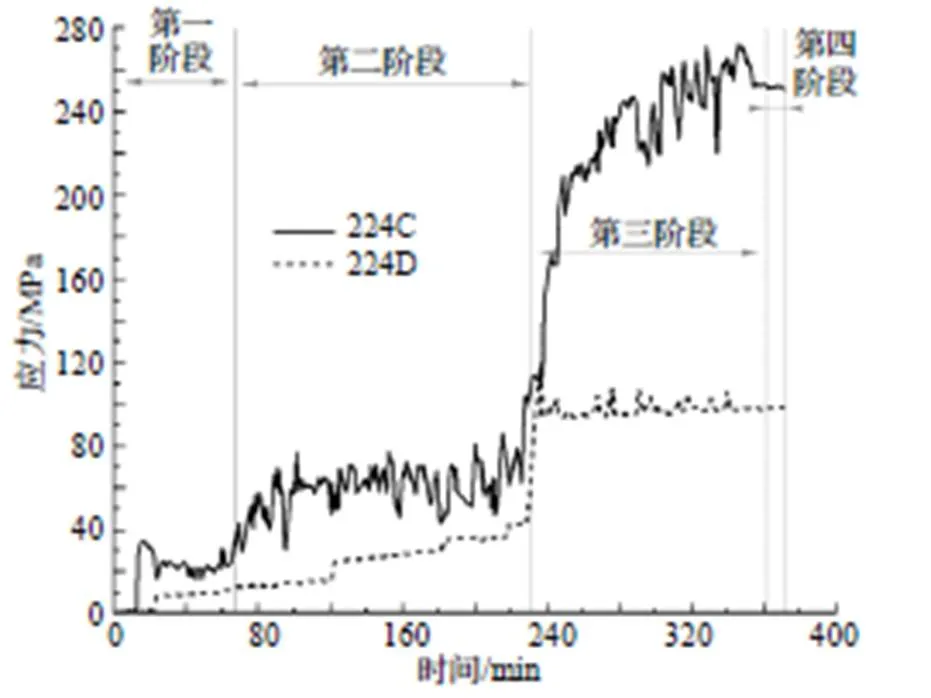
圖8 主隧道管片應力變化曲線
在切削過程中, 應力在第一階段末(即盾構機刀盤初頂至管片外壁時)、第二階段和第三階段產生較明顯的增幅, 第四階段應力呈現平穩發展趨勢. 在第一階段前10min, 盾構機向前推進至接觸試驗箱, 試驗箱內砂土和管片并未受到盾構機的頂推力, 應變可視為0. 當盾構機進入試驗箱并在砂土中向前掘進時, 盾構機上的頂推力通過砂土傳遞到管片, 管片產生第一個突增應力, 為34.41 MPa, 此時管片處于彈性階段. 隨著機器不斷向前推進, 刀盤距離管片越來越近, 管片上的應力也緩慢上升. 第二階段為盾構機切削管片直至破洞. 隨著盾構機對管片的持續切削, 混凝土開始出現裂縫, 此時切削環管片處于彈塑性階段, 盾構機對管片的頂推力保持在一個恒定的狀態, 因此管片上的應力呈現一種平穩波動的狀態. 在第三階段, 由于混凝土管片出現破洞, 在破洞周圍會產生應力集中現象, 因此應力曲線出現了第二個突增, 應力激增至209.37MPa. 隨著破洞面逐漸增大, 應力呈現緩慢增長的趨勢. 到第四階段, 管片被完全鉆穿, 盾構機繼續向前推進至整個刀頭完全穿過洞口, 此時應力不再增長, 呈現一個平穩狀態, 應力保持在252MPa左右.
(2)隧道變形
整個切削過程中隧道變形的監測結果如圖9所示.
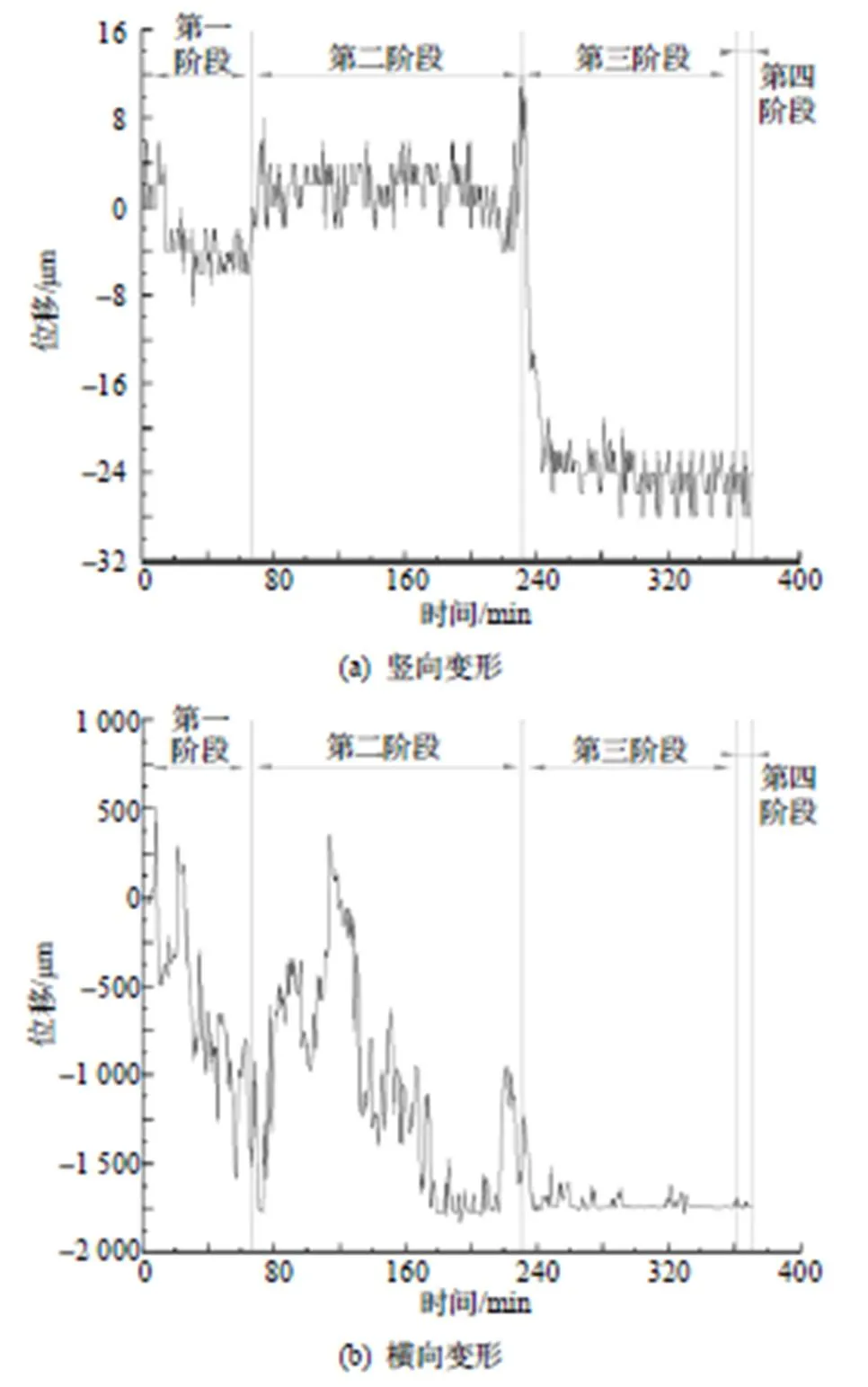
圖9 隧道變形曲線
圖9(a)為第4環豎向位移變化曲線; 圖9(b)為第4環橫向位移變化曲線. 第一階段, 當盾構機進入試驗箱內開始向前掘進時, 刀盤會將附近的土體通過內置的絞龍螺旋桿運送至刀盤后部的金屬護套內, 隧道管片前部土壓力減小, 導致隧道豎向變形減小了8μm, 橫向寬度增加了705μm. 但隨著盾構機將頂推力通過砂土傳遞給管片, 管片的變形不再增加, 砂土、隧道之間保持一種平衡狀態. 第二階段, 盾構機頂推力直接作用于隧道管片上, 此時隧道變形恢復到初始狀態. 但隨著時間的增加, 隧道管壁在切削作用下逐漸變薄, 橫向變形逐漸增加直至到達平衡狀態. 第三階段初, 由于切削環管片出現破洞, 應力集中在洞口附近, 因此標準環上受到的頂推力減小, 管片橫向變形出現回升狀態. 由于砂土間無黏聚力, 導致在第一階段盾構機挖去較多管片側面砂土后, 管片豎向土壓力大于橫向土壓力, 豎向變形縮短了34μm. 最終隨著管片完全破洞, 管片應力發生重分布, 管片變形再次達到平衡狀態.
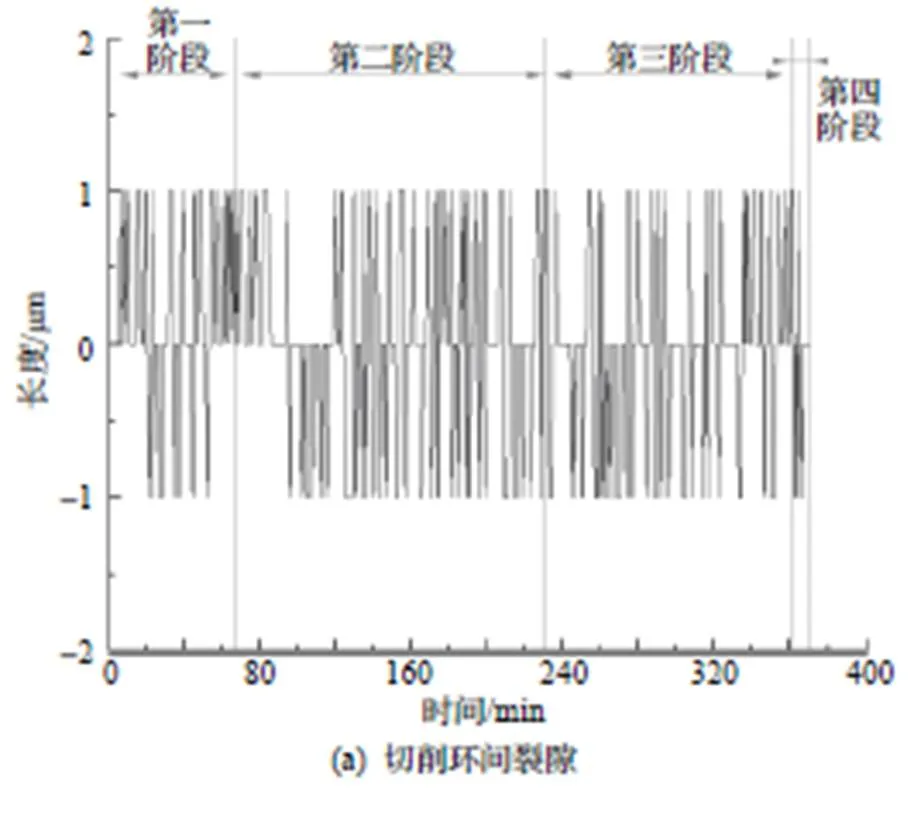
由于隧道由管片拼接而成, 因此需要對環與環之間的裂隙變化情況進行監測. 圖10(a)為切削環與切削環之間裂隙的變化情況, 可以發現環間裂隙變化并不明顯, 在-1~1μm之間. 這是由于在切削時, 頂推力作用于切削環上, 切削環間受力相差不大, 不會產生較大的裂隙. 圖10(b)為切削環與標準環之間裂隙的變化情況, 可以發現裂隙在第一階段并沒有很大的增長, 主要因為盾構機在砂土中掘進, 沒有直接接觸到管片. 第二階段, 盾構機開始切削管片后環間裂隙隨之緩慢增長, 增長幅度為5μm. 第三階段, 由于隧道破洞, 環間受到的頂推力減小, 使得隧道裂隙不再增長, 且隧道側邊砂土缺失, 導致隧道豎向和橫向土壓力不平衡, 標準環與切削環之間被擠緊, 裂隙長度縮短至-2μm. 第四階段為盾構機結束切削繼續向前頂進階段, 此時盾構機頂推力不再作用于管片上, 兩者之間只有盾構機向前推進時儀器金屬筒與管片洞口之間的摩擦力, 隧道裂隙不再產生比較明顯的變化.
(3)傾角
整個切削過程中隧道切削環管片轉動情況如圖11所示.
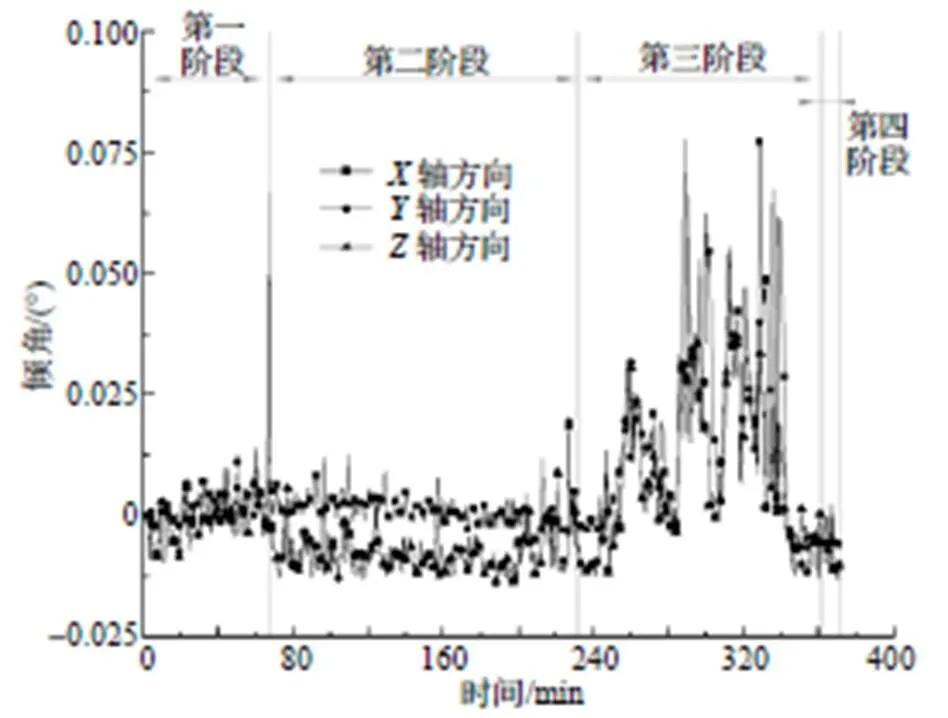
圖11 管片傾角變化曲線
在第一階段, 由于盾構機頂推力并未直接作用于管片上, 而是通過砂土傳遞到管片上, 隨著掘進長度不斷增加, 作用在管片上的力也不斷增加, 使得管片的傾角也不斷增加, 但增加的幅度不大, 只有0.01°. 在第二階段初, 當盾構機頂到管片壁時, 因為頂推力忽然施加于管片上, 管片產生一個明顯的轉動, 沿著軸和軸方向轉動了0.075°, 但該轉動隨即恢復. 這是由于隧道在第一階段時并未與管片后方的土緊密接觸, 當盾構機頂到管片時, 巨大的頂推力使得管片與后方的砂土接觸力增加, 從而使得管片恢復至原來狀態. 且因管片左側的砂土缺失, 側面土壓力減小, 管片沿著軸和軸方向轉回的角度略大于被接觸時轉動的角度. 在盾構機不斷切削管片的過程中, 由于盾構機頂推力與土壓力之間保持平衡, 使得管片并未產生較大的轉動. 在第三階段, 由于盾構機鉆穿管片導致切削環處管片內部的應力集中與應力重分布, 引起管片產生了0.0625°的轉動. 在第四階段, 當盾構機鉆穿隧道管片后頂推力不再作用于管片, 此時管片主要受到右側的土壓力, 管片轉動至-0.012°后整個體系恢復平衡, 管片不再產生轉動.
(4)振動
整個切削過程中隧道切削環管片振動情況如圖12所示. 為了避免切削時破壞振動傳感器, 將傳感器設置在第6環. 在第一階段, 盾構機切削加速度通過砂土傳到管片上, 因此管片產生了輕微的振動. 在第二階段, 由于管片第6環與第7環間存在縫隙且混凝土向外傳遞振動時會削減一部分振動, 因此第二階段振動強度與第一階段相差不大. 但隨著掘進的進行, 盾構機與第6環之間的橫向距離逐漸縮短, 在第二階段快結束時, 加速度呈現緩慢增加的趨勢. 在第三階段, 當管片出現破洞時, 振動迅速增強, 這是因為管片被切破后產生應力重分布, 引起振動強度迅速增加, 增加大小約為0.01m·s-2. 在第四階段, 盾構機完全貫穿管片后, 兩者之間只有盾構機向前推進時儀器金屬筒與管片洞口之間的摩擦力, 此時管片振動減小至0.
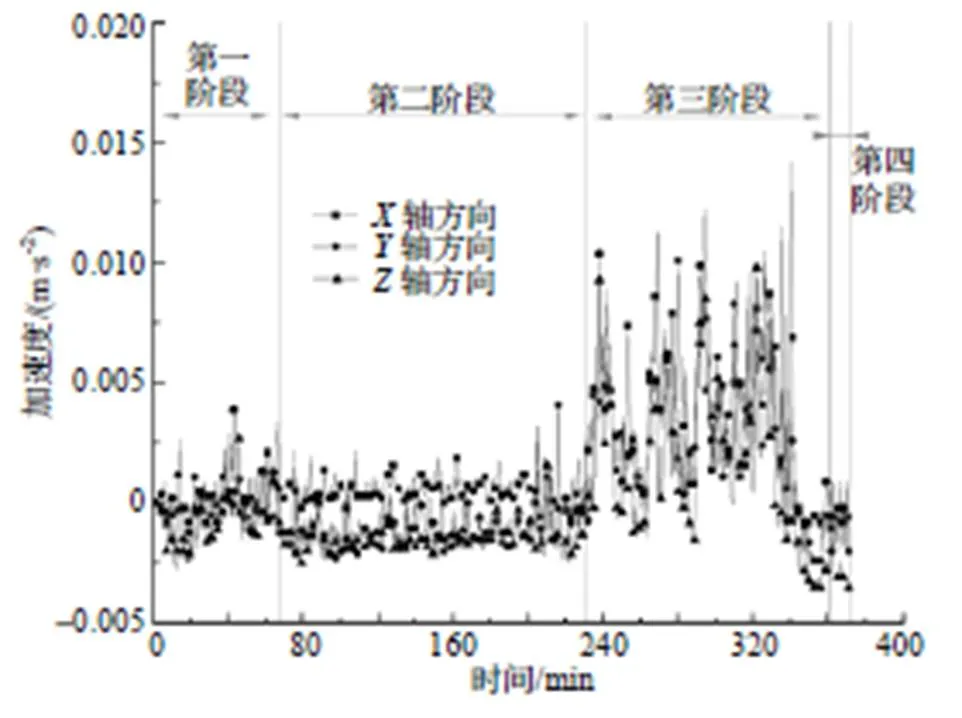
圖12 管片振動變化曲線
上述試驗結果表明該監測系統實現了對監測項目相關數據的無線實時傳輸以及預處理, 監測數據結果所采集到的隧道變形及應力變化情況與實際隧道變化相吻合[14], 證明該系統監測數據可靠有效, 可用于機械法聯絡通道工程的施工監測.
3 結語
(1)針對機械法聯絡通道施工過程中可能出現的諸多風險, 提出了一種無線智能監測系統. 該系統可對隧道管片的振動、應力、位移、裂隙以及周圍土層的沉降、土壓力、孔隙水壓力進行實時監測, 并可通過設定預警值對施工過程進行安全預警, 以保證施工過程安全可靠.
(2)通過模型試驗監測發現, 主隧道管片應力在第二和第三階段時變化主要呈現緩慢上升的趨勢. 在第三階段初隧道破洞時, 切削環管片產生應力集中現象, 應力出現突增.
(3)整個切削過程中隧道橫向位移明顯大于豎向位移; 標準環與切削環之間的裂隙在破洞階段發展較迅速, 但總體來說整個試驗過程中隧道變形不是很大; 隧道管片在盾構機頂進到管壁上和第三階段破洞后切削時產生輕微轉動, 總體傾斜程度不是很大; 隧道振動僅在第三階段時變化劇烈. 因為本試驗所采用的裝置為縮尺模型試驗平臺, 且隧道管片環與環之間不是整體澆筑, 而是拼接在一起的, 因此環間傳遞會損耗較多的能量, 導致隧道振動開裂情況不是很明顯. 而且隧道埋放在砂土內, 當盾構機頂推力、剪切力等作用于管片上時, 管片附近的砂土以及管片之間的連接件會阻止其發生相對轉動, 導致隧道傾斜情況不是很明顯.
[1] 韓寶明, 李亞為, 魯放, 等. 2021年世界城市軌道交通運營統計與分析綜述[J]. 都市快軌交通, 2022, 35(1):5- 11.
[2] GB 50157—2013. 地鐵設計規范[S].
[3] 劉志鋒, 商曼. 基于GRP5000移動式三維激光掃描儀的隧道橢圓度監測分析[J]. 河南科技, 2021, 40(14): 86-88.
[4] Che H B, Tong L Y, Liu S Y, et al. Field investigation on the mechanical performance of corrugated steel utility tunnel (CSUT)[J]. Journal of Constructional Steel Research, 2021, 183:106693.
[5] Ye Z J, Zhang C P, Ye Y. Principle of a low-frequency transient electromagnetic radar system and its application in the detection of underground pipelines and voids[J]. Tunnelling and Underground Space Technology, 2022, 122:104392.
[6] Tejedor J, Macias-Guarasa J, Martins H F, et al. A novel fiber optic based surveillance system for prevention of pipeline integrity threats[J]. Sensors (Basel, Switzerland), 2017, 17(2):355.
[7] Liu Z L, Li S Z. A sound monitoring system for prevention of underground pipeline damage caused by construction[J]. Automation in Construction, 2020, 113: 103125.
[8] 張利文. 盾構隧道沉降監測系統的設計與研究[D]. 上海: 上海工程技術大學, 2019.
[9] Wang X Y, Ma Z, Zhang Y T. Research on safety early warning standard of large-scale underground utility tunnel in ground fissure active period[J]. Frontiers in Earth Science, 2022, 10:828477.
[10] 周濟兵, 詹顯軍, 陳博. 一種基于情景-應對的綜合管廊應急響應體系的研究[J]. 現代隧道技術, 2021, 58(S1):108-119.
[11] 肖麗, 黃宏偉. 盾構隧道可視化風險預警試驗系統設計[J]. 武漢大學學報(工學版), 2016, 49(5):745-749.
[12] 李淑強, 楊一才. 機械法聯絡通道施工質量管理體系及監測研究[J]. 科技風, 2022(17):83-85.
[13] 梅清俊, 朱瑤宏, 馬永政, 等. 濱海軟土地層機械法聯絡通道施工影響監測分析[J]. 寧波大學學報(理工版), 2021, 34(2):73-79.
[14] 楊佳棟, 鄭榮躍, 鄭詩怡, 等. 機械法聯絡通道T接部位接收端切削模型試驗研究[J]. 施工技術(中英文), 2022, 51(3):12-17.
[15] 胡威, 黃強, 李海波, 等. 機械法聯絡通道施工對T接部位沉降影響的實測與數值分析[J]. 施工技術(中英文), 2022, 51(13):68-74.
[16] 周玉甲, 郭利偉, 肖海燕,等. “北斗+安全”邊坡綜合監測預警系統設計與實施[J]. 湖南交通科技, 2022, 48(3):183-188.
Mechanical construction monitoring of contact channel based on scale test
ZHENG Shiyi, ZHENG Rongyue*, YANG Jiadong, DENG Yuebao, ZHU Yaohong
( Collaborative Innovation Center of Coastal Urban Rail Transit, Ningbo University, Ningbo 315211, China )
As a new construction method of underground structure, it is of great significance to study the monitoring technology of mechanical connection passageway. Aiming at the problems of insufficient integration of monitoring targets and low information level in current engineering, a complete online intelligent monitoring system for the construction safety of contact channel is proposed based on the Ningbo Metro mechanical contact channel project. The system is divided into application layer, transmission layer and perception layer, and has sampling, storage, transmission, data processing and early warning functions. The development law of deformation and stress during the excavation of the contact channel is tested by scale model test, and the reliability of the monitoring system is verified. The test results show that the system can achieve real-time monitoring, wireless transmission and other objectives, meet the monitoring needs of practical engineering, and can be further extended to practical engineering.
contact channel; mechanical construction; wireless monitoring; scale model test
TU91
A
1001-5132(2023)03-0079-08
2022?12 ?26.
寧波大學學報(理工版)網址: http://journallg.nbu.edu.cn/
北侖區關鍵核心技術攻關項目(2022001); 寧波市重大科技攻關暨揭榜掛帥項目(2022Z063).
鄭詩怡(1999-), 女, 浙江寧波人, 在讀碩士研究生, 主要研究方向: 地下工程. E-mail: zhengsymail@qq.com
通信作者:鄭榮躍(1964-), 男, 浙江寧波人, 教授, 主要研究方向: 軟土地基處理. E-mail: rongyue@nbu.edu.cn
(責任編輯 韓 超)
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34