基于自平衡的林間竹子獨輪搬運車的設計
2023-05-30 10:48:04李曉曉母銀飛孫付春楊濤龔一龍董萬福
成都大學學報(自然科學版) 2023年1期
李曉曉 母銀飛 孫付春 楊濤 龔一龍 董萬福

摘 要:利用現代設計方法學完成林間竹子搬運車的初步功能方案設計,再通過有效值分析法獲得最佳設計方案.完成竹子獨輪搬運車的行走裝置、搭載平臺和平衡調節裝置的結構設計后,還進行了搬運車自平衡控制系統的設計與運動仿真分析.基于自平衡的林間竹子獨輪搬運車的設計,能有效地解決目前竹子搬運工具的通過性和平衡性差的問題,提升了運輸效率、減輕了勞動強度,具有良好的開發前景.
關鍵詞:竹材;現代設計方法學;搬運車;有效值分析法;自平衡
中圖分類號:S776.361
文獻標志碼:A
0 引 言
我國竹林資源大多分布在地勢復雜的丘陵地區,竹林間基本上都是崎嶇的林間路,道路窄小、路面狀況復雜,而且林間路坡度大、拐彎多且急[1],該路況基本無法使用中型和大型的運輸機械來搬運物資,林間竹子的搬運大多使用手推車、兩輪和三輪摩托車來搬運.基于地形和路面情況的復雜,尤其是下雨過后山間道路泥濘且很滑,一般的手推車很難控制速度[2],兩輪的摩托車又很難控制平衡,而三輪摩托車轉向時容易發生側翻,總之,現有的搬運工具實用性低,竹材運輸需要投入大量的人力.基于目前竹材搬運車機械的自動化、智能化程度低,通過性和平衡性不可兼顧[3],因此,本研究制作出一款適合在丘陵山地復雜的林間道路上作業且可自動調節平衡的小型獨輪搬運車,以克服目前竹材搬運車的不足.
1 竹林間竹子搬運車方案設計
1.1 搬運車的設計任務
通過對竹子生長環境和搬運路況的考察,結合具體使用情況和現代設計方法學原則[4],竹子搬運車具體的要求明細見表1.
1.2 總功能分解
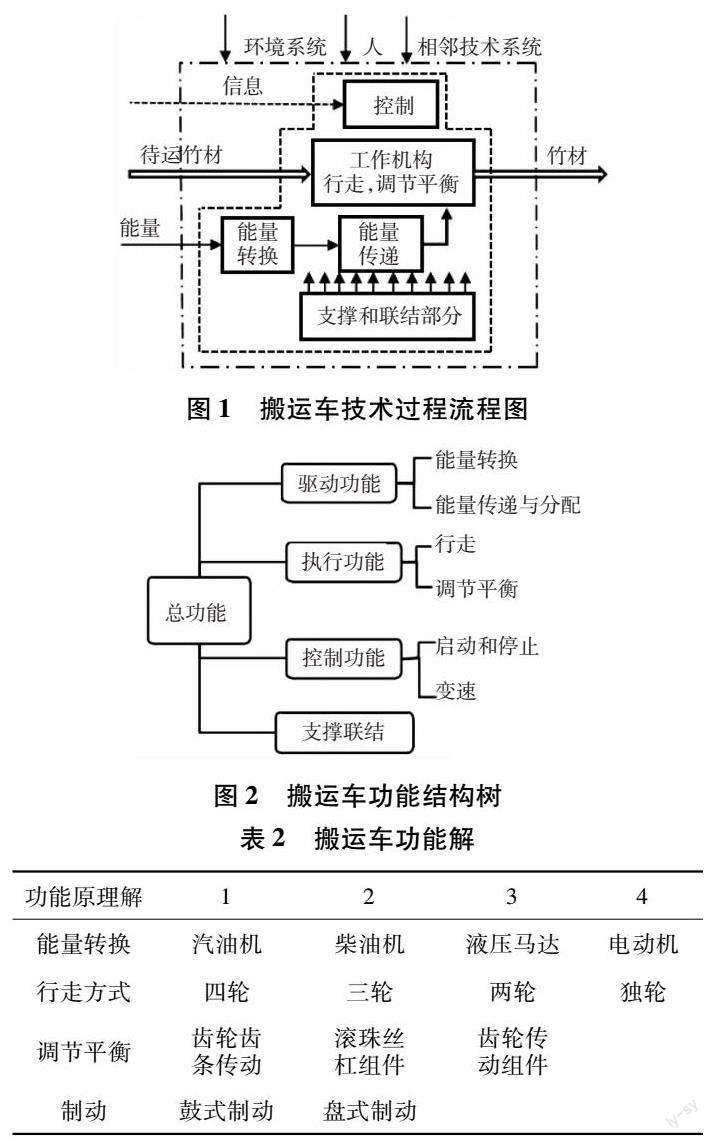
竹林間竹子搬運車的總功能是對竹林間的竹子實現短距離的運輸,并且能夠在行駛過程中實現自動檢測并調節車體左右2側平衡.為了清楚地表示竹林間搬運車各工作部分和周圍環境的工作關系,建立了如圖1所示的獨輪搬運車技術過程流程圖.流程圖中,環境系統是指丘陵山地的竹林環境,相鄰技術系統是指搬運車對能源和控制等的技術要求,圖中點劃線表示機械系統與外部的聯系.
為了更直觀地了解竹林間搬運車系統各部分的功能,將系統的總功能分解為簡單的功能元,并建立如圖2的搬運車功能樹.搬運車總功能具體分為驅動功能、執行功能、控制功能和支撐聯結部分.
1.3 原理方案解
根據搬運車功能樹,采取系統組合的方法,建立起搬運車組合的形態矩陣,將其可能的方法進行列舉排列,計算出解法,并在所有的解法中找出符合項目實際意義的方案.搬運車所有形態矩陣見表2.
由表2可知,當不考慮實際工作環境和其他條件制約的情況下,能得到的方案一共有4×4×3×2=96種方案.
1)能量轉換.丘陵地區竹林間的竹子運輸對生態環境的保護是必須首要考慮的問題,首先考慮使用電動機作為驅動源.交流電動機在竹林中使用會造成諸多的不方便,初步考慮使用直流電動機作為驅動源.
2)行走方式.對于竹林間的道路而言,四輪、三輪和兩輪的搬運車都存在通過性差的問題,相比較之下獨輪車擁有較好的通過性.
3)制動方式.盤式制動的制造成本會比鼓式的更高,但是鼓式構造零件多,不利于后續的維修,盤式剎車構造簡單,維修更容易,初步選用盤式制動.
綜上所述,初步制定了3種搬運車的設計方案.
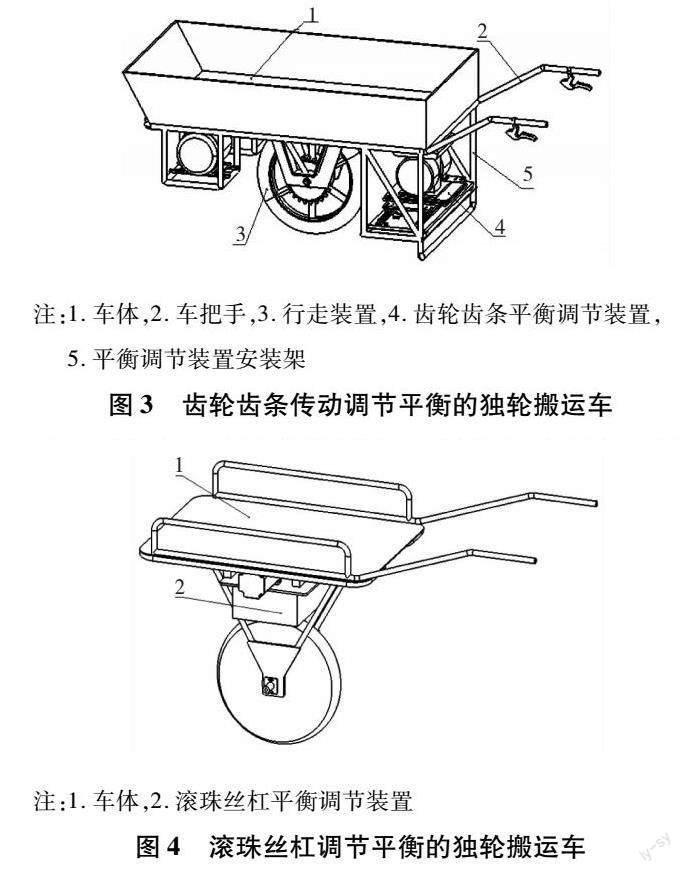
方案1:使用直流電機的齒輪齒條傳動調節平衡的獨輪搬運車如圖3所示.其主要包括車體、車把手、行走裝置、齒輪齒條平衡調節裝置、平衡調節裝置安裝架和控制器.此方案通過控制把手對行走輪的運動狀態進行調控;通過剎車把手停止行走輪;當檢測到車體不平衡時,通過平衡調節裝置對車體進行平衡調節;當車體有向左傾斜的趨勢時,則由伺服電機控制齒輪向右運動,從而帶動整個滑板向右運動,最后使車體重新恢復平衡;當車體有向右傾斜的趨勢時,則由伺服電機控制齒輪向左運動,從而帶動整個滑板向左運動,最后使車體重新恢復平衡.
方案2:使用直流電機的滾珠絲杠調節平衡的獨輪搬運車如圖4所示.其主要包括車體、行走裝置和滾珠絲杠平衡調節裝置.此方案通過控制車體上的把手對行走輪的運動狀態進行調控;當檢測到車體不平衡時,通過滾珠絲杠平衡調節裝置對車體進行平衡調節;當車體有向左傾斜的趨勢時,則由伺服電機控制滾珠絲杠向右運動,從而帶動整個平衡調節裝置向右運動,最后使車體重新恢復平衡;當車體有向右傾斜的趨勢時,則由伺服電機控制滾珠絲桿向左運動,從而帶動整個平衡調節裝置向左運動,最后使車體重新恢復平衡.
方案3:使用直流電機的齒輪傳動組件調節平衡的獨輪搬運車如圖5所示.其主要包括行走裝置、搭載平臺和齒輪傳動組件平衡調節裝置.此方案通過控制車體上的把手對行走輪的運動狀態進行調控;當檢測到車體不平衡時,通過齒輪傳動組件平衡調節裝置對車體進行平衡調節;當車體有向左傾斜的趨勢時,則由直流減速電機控制齒輪傳動組件帶動配重向右擺動,從而使整個重心向右偏移,最后使車體重新恢復平衡;當車體有向右傾斜的趨勢時,則由直流減速電機控制齒輪傳動組件帶動配重向左擺動,從而使整個重心向左偏移,最后使車體重新恢復平衡.
1.4 設計方案的評價與選擇
有效值分析法是系統工程學最重要的評價方法之一,根據系統論觀點,有效值分析法把待評價的目標看成1個系統,由于系統可以分解,于是可以把總評價目標拆分成多個級別的分目標,整體呈現出一個樹狀結構,也就是目標樹.例如,Z為總目標,Z1和Z2為第1級分目標,Z11和Z12為Z1的分目標,即Z的第2級分目標,Z111和Z112為Z11的分目標,即Z的第3級分目標,最末級的分目標即為總目標的具體評價目標,即評價標準.建立評價目標樹時應選擇起決定作用的設計要求和條件作為主要目標,各個目標之間應相互獨立.每個評價標準在總的評價目標中有著不一樣的重要性,通常把重要程度用加權系數表示,加權系數通常用0~1之間的數來表示,最終每個分目標的加權系數等于1.搬運車的評價目標樹和加權系數如圖6所示.
2 自平衡獨輪搬運車結構設計
自平衡獨輪搬運車主要包括行走裝置、搭載平臺和平衡調節裝置3部分.其中,行走裝置主要包括行走輪、行走輪安裝架、車架和控制把手等;搭載平臺主要指的是安裝在搬運車行走輪兩側的載物框;平衡調節裝置主要包括直流減速電機、電機安裝架、齒輪傳動組件、配重電池和電池安裝架等.自平衡獨輪搬運車的主要設計參數見表4,整體結構如圖7所示.
2.1 行走裝置的設計
自平衡獨輪搬運車的行走裝置主要包括行走輪、行走輪安裝架、車架和控制把手等.使用環境決定著行走輪的選用,土壤的承載能力影響行走輪的寬度,路面的狀況影響行走輪的大小[5].車架是行走裝置的基礎部件,搭載和固定連接著整個獨輪搬運車所有必需的零部件.搬運車在行駛過程中和搭載貨物受到外界作用力時,所有的作用力都只能由車架來接收和傳遞.竹農通過車架上的車把手對行走輪的狀態進行控制,右車把手上的手柄控制車速,左把手上的手柄控制搬運車的啟停.行走裝置的三維結構如圖8所示.
2.2 搭載平臺的設計
自平衡獨輪搬運車主要是用于林間竹材運輸,竹材的密度是隨著生長的時間而有所差異的,本研究針對的竹材為生長期超過3年的竹材,由研究報告可知,該類竹子的密度大約為1.16 g/cm3,竹材的主干高度通常為6~12 m,竹子的直徑大小在40~90 mm之間[1].選擇中間的數據作為初步估算的依據,選取主干為10 m,竹子直徑為70 mm.根據搬運車整體設計的要求,將竹材截切為900 mm長的小節,根據竹子的密度和直徑估算每1小節竹子重2 kg左右,1根竹子的重量約22 kg,單個裝滿竹材的竹材框的重量小于50 kg.根據竹材的物理特性,竹材框的尺寸為920 mm×220 mm×290 mm.竹材框上的邊框連板為可以旋轉設計,目的是卸載竹材時,竹農可以手動把搭掛在邊框連板上的連接板挪動,此時邊框連板放下,則竹材便可以從竹材框中卸載下來.竹材框的三維結構如圖9所示.
2.3 平衡調節裝置設計
2.3.1 平衡調節裝置設計
平衡調節裝置用于調節車體的平衡.當傳感器檢測到車體傾斜的信息后,將信號傳遞給控制系統,這時控制系統啟動平衡調節裝置當中的直流減速電機,當電機接受到來自于控制系統的信號后,電機開始工作,同時帶動裝置中的電機齒輪轉動,從而帶動回轉齒輪一起運動.由于配重電池和回轉齒輪是通過螺栓連接在一起的,當回轉齒輪轉動時,與其連接的配重電池配重也會隨之一起運動,利用配重電池的重量在一定程度上逐漸抵消掉車體傾斜的重量,在一定程度上重新調節車體的重心.電機齒輪如此左右循環往復運動,使車體保持動態平衡狀態.平衡調節裝置的三維結構如圖10所示.
2.3.2 控制系統設計
1)自平衡原理.電動獨輪搬運車主要存在前后左右4個方向的平衡問題.通過分析可知,搬運車前后2個方向的平衡主要通過竹農來手動平衡,而自平衡指的是獨輪搬運車左右2邊的平衡.當控制器檢測到車體的傾斜信號時,控制獨輪搬運車平衡調節裝置中的直流減速電機,使平衡調整裝置向相反的方向擺動,從而平衡掉獨輪搬運車的傾倒趨勢,以此保持獨輪搬運車的動態平衡.自平衡獨輪搬運車的車體左右傾斜與其車輪的轉動是互相獨立的,同時使用者手扶車把手,把握車體前后的平衡.當車體向左傾斜時,則通過控制直流減速電機驅動平衡調節裝置中的齒輪向右運動以保持車體平衡;當車體向右傾斜時,則通過控制直流減速電機驅動平衡調節裝置中的齒輪向左運動以保持車體平衡;當車體保持平衡狀態時,直流減速電機不工作.以此往復循環,使獨輪搬運車始終保持動態平衡狀態.
2)主程序流程圖設計.主程序中先對各個模塊進行初始化設置,然后根據芯片所要實現的功能,對主程序進行編寫.自平衡獨輪搬運車最主要的目標就是實現小車的平衡控制.當控制器接收到平衡傳感器的信號后,輸出脈沖到直流減速電機,使其控制平衡調節裝置左右運動.通過控制器對車體的平衡狀態進行判斷,當檢測到車體處于不平衡狀態時,啟動平衡調節裝置當中的直流減速電機,通過擺動電池配重來調整搬運車重心,當搬運車的車體恢復平衡時,直流減速電機停止工作,當車體不平衡時再重新啟動,以此循環往復,使獨輪搬運車一直處于一種動態平衡之中.
2.3.3 平衡調節裝置的運動仿真分析
平衡調節裝置是搬運車自動調節平衡的關鍵部件,依靠齒輪傳動來帶動配重電池的運動,從而使搬運車的車體偏移時的整體重心得到一定程度的調節.對平衡調節裝置做相應的運動分析,是衡量該裝置設計合理性的一個重要實驗過程,可以了解模型在運動過程中的變化規律,讓平衡調節裝置在搬運車的行駛過程中,能夠具有更好的穩定性與可靠性.將建立的三維模型從Solidworks中另存為x-t的中間通用格式,將其導入到ADAMS軟件中,在各零部件位置添加相關的條件約束與對應的載荷作用,得到平衡調節裝置的邊界條件施加圖如圖11所示.
當所有的約束添加完成過后,對電機的輸出軸進行一個旋轉驅動的添加,平衡調節裝置中直流減速電機的轉動速度為665 r/min.在該裝置中,電機安裝架中的電機軸與回轉齒輪安裝軸都是固定不動的,即設置為固定副,電機齒輪和回轉齒輪分別圍繞著電機軸和回轉齒輪安裝軸做回轉運動,即都為轉動副.齒輪在運動過程中經過計算時間為2.5 s,即設置仿真的時間為2.5 s,得到回轉齒輪的位移如圖12所示,回轉齒輪的質心速度變化如圖13所示,回轉齒輪的質心加速度如圖14所示.
由圖12~圖14可知,在搬運車的行駛過程中,平衡調節裝置中回轉齒輪的移動位移隨著速度減小而逐漸縮小,加速度逐漸增加,但運動范圍處于設計的合理范圍之內,符合自平衡獨輪搬運車實際的工作過程規律.
3 結 論
竹資源的生長環境比較復雜,給竹材的運輸帶來了諸多困難.基于自平衡的竹林間竹子獨輪搬運車,專門用于丘陵地區竹林間的竹材運輸.利用機械設計方法學的設計理論,對獨輪搬運車的各部分進行了功能元求解,通過有效值分析法對3個初步方案進行評價,得到竹林間竹子獨輪搬運車的最佳方案,完成了行走裝置、搭載平臺和平衡調節裝置的設計,后期還需要樣機制作和實驗.隨著智慧農業和精準農業的不斷發展,林竹運輸將繼續向自動化和智能化方向快速發展,無人操作的農業機器人是農業發展的必然趨勢.
參考文獻:
[1]李曉曉,王茂安,楊濤,等.手持式竹林采伐機設計[J].成都大學學報(自然科學版),2020,39(2):199-203.
[2]林玉新.一種斜坡上可調節平衡的小推車[J].中國科技信息,2019,31(17):66-67.
[3]劉冰.一種新型農用單輪手推車:CN211281053U[P].2020-08-18.
[4]李梅芳,趙永翔.TRIZ創新思維與方法:理論及應用[M].北京:機械工業出版社,2016.
[5]鮑玉冬,楊杰,趙彥玲,等.基于輪壤接觸力學行為的藍莓采收機行走驅動系統設計[J].農業工程學報,2020,36(7):43-52.
(責任編輯:伍利華)
Abstract:
Modern design methodology is used to complete the preliminary functional design of the bamboo carrier in the forest,and then through the effective value analysis method,the best design scheme is obtained.After completing the structural design of the walking device,carrying platform and balance adjustment device of the single wheel bamboo carrier,the design and motion simulation analysis of the self balance control system of the carrier are also carried out.The design of forest bamboo single wheel carrier,based on self balance,can effectively solve the problems,such as poor trafficability,poor balance in current bamboo handling tools and so on.Therefore,the design can also improve transportation efficiency,reduce labor intensity,and have a good development prospect.
Key words:
bamboo;modern design methodology;carrier;effective value analysis method;self balance