一種面向作戰場景的任務建模方法*
2023-06-05 00:49:32閆澤林
艦船電子工程 2023年2期
閆澤林
(陸軍工程大學指揮控制工程學院 南京 210007)
1 引言
當前作戰呈現出多元、廣域、快速的特點,軍事作戰任務趨于多元化和復雜化,作戰場景存在變化性和不可預知性,這為指揮人員分析作戰任務,制定作戰計劃帶來了挑戰。新的軍事任務及其作戰過程不斷出現,遂行多樣化軍事任務的能力成為衡量部隊戰斗力的標準,這要求指揮信息系統結構在與任務建立聯系時功能多樣、組合靈活、調整迅速[1]。其重要前提是任務的有效分析。在分析作戰任務中,任務分解建模是一項重要工作。
作戰任務是各級指戰員在不同作戰場景中所面對的一系列任務的統稱。在作戰籌劃過程中,根據指揮層級不同,不同層級指戰員將完成不同的任務。作戰任務分解建模指將上級下發的作戰任務進行分解,劃分為更為細致的任務,用于指導本級制定相應的作戰計劃[2~3]。
精細化的作戰任務分解建模便于指揮員對作戰任務進行詳細分析。以往作戰任務分解中,僅從任務目標、任務完成單位、基本作戰單元[4]等要素考慮,缺乏對作戰場景的描述分析。為此,論文提出了一種面向作戰場景的任務建模方法,用于指導指揮員對作戰任務進行分解建模。
2 作戰任務描述
2.1 作戰任務分解框架
針對作戰任務多樣且關聯關系復雜的難點,本文擬通過對作戰任務進行規范化描述來解決;針對作戰場景要素多且影響任務分解、可行分解方案多且難以優選的難點,本文擬通過構建任務分解模型和設計任務分解算法來綜合解決[5]。在上述解決思路下,本文建立了一種通用的作戰任務分解框架,如圖1 所示。
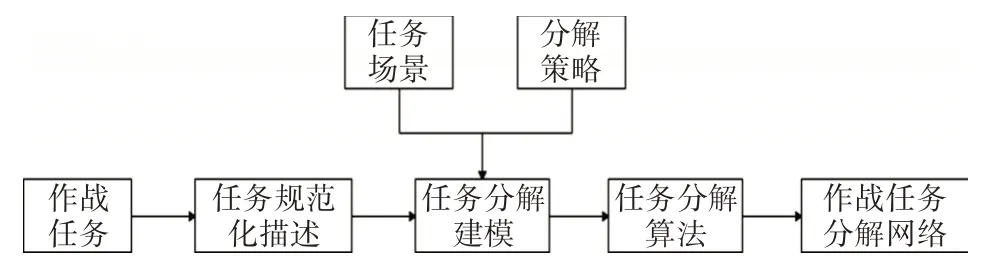
圖1 作戰任務分解框架
2.2 基本作戰任務定義描述
作戰任務描述是實施作戰任務分解過程的基礎,更是指揮員構建面向任務的作戰計劃的前提。各級指揮人員對作戰任務認知的基礎是建立特定戰場的概念模型,但面對不可預知的戰場情況,目前作戰任務的描述仍存在概念認識不夠準確、描述規則不夠全面、表達方式不一致等問題[2]。為此,本文從作戰任務規范化建模入手,綜合考慮作戰任務的應用場景、關鍵要素、關聯關系等建立統一且規范的作戰任務描述。
將基本作戰任務定義為多元組Mission=<Name,Role,Target,Opration,Time,Surroundings>[6],其中:
1)Name表示作戰任務的名稱;
2)Role表示參與作戰任務的角色集合,即參戰力量;
3)Target 表示作戰任務擬完成的指標,即作戰目標和對作戰任務完成后的客觀預測;
4)Opration 表示作戰行動集合,即作戰任務中出現的作戰行動或者根據具體情況可能衍生出的作戰行動;
5)Time 表示作戰任務的時間參數,屬性可描述為(TStart,TEnd),TStart 為任務的開始時間,TEnd 為作戰任務結束時間,即任務收尾戰場清理完畢的時間;
6)Surroundings 表示執行任務的作戰場景,包括執行任務的地理位置、氣象條件、電磁環境,屬性可描述為(Geography,Weather,Electromagnet)。
3 作戰任務分解
作戰任務受作戰場景的影響,其分解過程還受相關規則的約束。作戰任務分解過程可以看作是針對特定的作戰場景E,基于任務及場景分解方法、任務關系、任務模板等分解策略S,逐步實現對作戰任務分解樹N 實例化的過程。為了實現這一過程,將任務分解定義為任務分解景況:
Q=
即基于作戰場景E、分解策略S,并結合具體的算法,逐步生成N。
3.1 作戰場景
作戰任務與作戰場景相關,作戰場景的變化會直接影響作戰任務的調整,作戰計劃的制定需要綜合考慮戰場中面臨的敵情、戰場環境等信息,因此,需要對作戰場景進行描述,通過描述模型能夠直觀表征作戰場景,以便于有效直接支撐開展作戰任務分解,對指揮信息系統的調整方向、目標和渠道具有推動作用[8]。不同的作戰場景需求不同的作戰任務,不同的作戰任務適用于不同的作戰場景[9]。本文主要考慮會直接影響作戰任務分解的敵情信息、地形信息、戰場環境等主要因素對作戰場景進行建模[5],其中,敵情信息著重考慮敵部署和敵企圖。借鑒任務規范化描述方法,將作戰場景描述為E=<Edeploy,Eattempt,Eenvironment>,式中:Edeploy為敵部署,包括敵兵力及其位置信息;Eattempt為敵企圖,包含敵計劃、敵目標和敵動向;Eenviron為戰場環境,包括人工環境、自然環境、社會環境等。考慮到作戰場景要素繁多,且多數要素之間存在著復雜的多維關系,因此,本文將通過相關約束原則對關系予以明晰,進而構建作戰場景任務網絡,實現網絡調理化,支撐任務分解。
3.2 關鍵詞提取
基于作戰場景的建模,得到了一個敵軍較為詳細的戰斗部署分類態勢。根據戰斗任務的規范化描述規則,已經得到以元組形式呈現的任務規范化描述的實例,擬從作戰場景E 描述模型中提取關鍵詞K,任務分解景況Q 將目前分解得到的元組元素與提取的關鍵詞K 進行匹配,對任務進行進一步的分解,對于分解得到作戰任務通過分解策略S 分解為具體化的作戰行動,構成任務網絡N。
通過提取作戰場景E 中關鍵詞K,構建針對任務的關鍵詞體系,分解景況Q 在K 的基礎上細化成更具體的子任務。
下面對關鍵詞K的提取規則進行描述:
1)設置主關鍵詞、副關鍵詞及子關鍵詞。將作戰場景描述模型看作一個任務樹。標記作戰場景中對我軍部隊作戰行動有影響的因素,將任務樹中靠近根節點的且下屬元素中存在對我部隊任務行動產生影響的節點設置為主關鍵詞,由于主關鍵詞的設置依據是根據其下屬元素中對我軍行動造成影響的節點所設置的,那么采用倒推法,先篩選葉節點中會對我方作戰行動造成影響的各類因素條件。
2)搜索全部葉節點,發現其中對我方作戰任務產生影響或者可能產生影響的因素。如敵方有撤退計劃,我方必須考慮切斷敵退路,實施包圍等任務計劃。作戰場景中敵方的計劃部署需要我方戰斗任務做出適應性調整,使作戰任務更具針對性,便于指揮機構和指揮員實施精準打擊。具備上述條件的任務樹葉節點設置為子關鍵詞,同時存在子關鍵詞的路徑中,除主關鍵詞和子關鍵詞外均設置為副關鍵詞。
根據上述規則,形成以任務模型為基礎的關鍵詞K提取鏈路表,如表1。
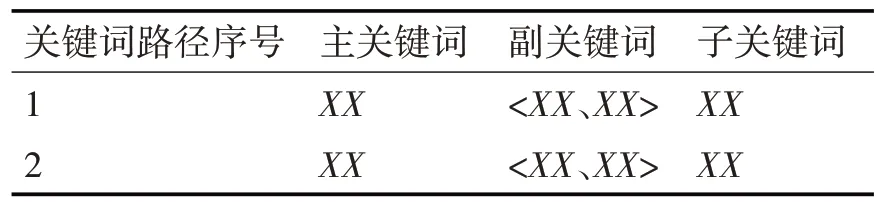
表1 關鍵詞K提取鏈路表
3.3 任務細化
在分解景況Q 的基礎上,基于關鍵詞K 的提取表構建一種匹配機制,目的是為了能夠對作戰任務進行細化,更貼近實際的作戰行動。任務景況Q為任務規范化描述后的集合,包含作戰任務的諸多要素,以多元組的形式呈現。現將每個多元組中的元素與關鍵詞K 提取表的關鍵詞鏈進行匹配,以達到預期目的。匹配機制描述如下:
1)逐個提取Q 中多元組的元素,依次命名為a1,a2,b1,b2,c1,c2,……依此類推。命名依據是任務的不同屬性,即規范化描述后同一多元組中的元素為同一字母模式。
2)將提取出的元素與關鍵詞K 提取鏈路表中的每一條路徑進行對比分析,若能夠根據路徑信息產生更詳細的任務描述或作戰行動,則視為一次匹配,每次匹配產生的作戰任務詳述會記錄進任務境況Q 中。若兩者無實際關聯,則不匹配,跳過該元素與當前關鍵詞鏈路的匹配分析,將該元素與下一條關鍵詞路徑匹配,重復嘗試匹配操作。在一個元素與所有路徑匹配結束后,對下一元素不斷重復以上操作。
3)匹配成功后,產生基于關鍵詞的子任務,生成作戰任務細化表2。
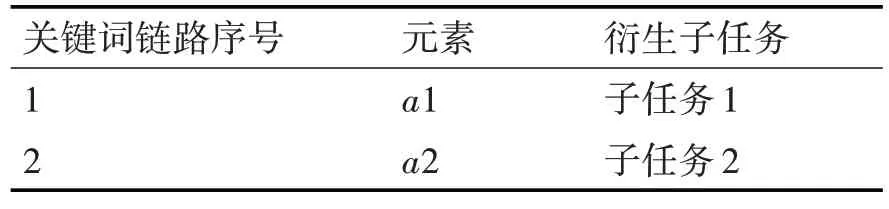
表2 機制匹配子任務形成表
3.4 任務分解樹構建
基于衍生子任務,形成初始作戰任務分解后的子任務集合。由于集合中子任務并沒有達到適應戰場信息系統指揮的元任務程度,且無歸類亂序排列,需要對子任務進行規則約束和關系約束,并進一步分解[7]。
3.4.1 規則約束
1)規則一:同類聚合規則
根據作戰行動任務性質的劃分,將執行同一類別任務的子任務聚合為同一集合,聚合分類擬定為:進攻任務、防御任務、保障任務、殲滅任務、排障任務。
2)規則二:重復消除規則
子任務集合中可能存在名稱相同的子任務,出現任務的無效重疊,消除重復子任務,簡化子任務集合所占空間。
3)規則三:指向目標原則
分析任務方向,行動預期和戰技指標,確保任務目標明確,精確指向打擊目標或階段目標,排除模糊任務
3.4.2 關系約束
作戰過程中,子任務之間存在著多種、復雜的關聯關系,關系約束是構建任務網絡、組織任務協同和(任務細致分解的基本前提。
1)關系一:層級關系
表示父任務與子任務之間的關系。用Rlevel表征,Ra、Rb表示兩個子任務,Ra>Rb代表Ra為Rb的父任務,層級高于Rb,Rb為Ra分解后的子任務之一且任務網絡N中Ra只能出現在Rb的上層級,確保層級關系清晰,任務分解符合作戰流程。
2)關系二:時序關系
表示子任務之間執行的先后順序。根據作戰要求和任務執行背景安排,父任務先于子任務并分解為子任務,子任務之間存在或不存在直接時序關系,不同分支子任務可能同時進行。例如“炮火覆蓋”時序上先于“戰場清理”,“戰場清理”可分解為“傷亡統計”和“繳獲武器”,兩個子任務時序上可同時進行。用Rtime表征,Ra>Rb表示前項任務時序上先于后項,先于Rb執行或是Rb的準備任務。
3)關系三:邏輯關系
表示子任務之間的邏輯依賴關系。在執行作戰任務的過程中,有些任務需要前序任務的鋪墊,即任務條件是前序任務的結果,任務之間產生邏輯關系。用Rlog表征,and、or、not表示任務之間的邏輯關系,以任務Ra和Rb為例,and 表示Ra和Rb為并列出現,即二者為關聯任務,一般同時發生并被執行;or 表示Ra單獨執行或者Rb單獨執行均可,互不干涉;not為非關系,當Ra被執行后,Rb不可被執行,反之亦然。
4)關系四:功能關系
表示任務執行情況對其他任務執行效果的影響關系。功能關系包括促進關系、阻礙關系和依賴關系。以任務Ra、Rb為例,促進關系表示Ra的執行對于Rb有有利影響,能夠從功能層面促進Rb的執行;阻礙關系說明Ra對R 的執行存在不利影響,會阻礙其執行,增加任務難度;依賴關系分為三種:
(1)執行觸發依賴。Rb的執行依賴于Ra的執行出發,即只要Ra開始執行,Rb就有了執行的基礎條件。
(2)執行效果依賴。Rb的執行依賴于Ra達成的任務效果,即需要Ra執行完畢之后達成某種特定的任務效果,才使Rb具有可以執行的基礎條件。
(3)完全依賴。Rb的執行完全依賴于Ra,即使得Rb執行的充分條件是Ra成功執行,既依賴于Ra的執行,又依賴于Ra的特定執行效果。
3.4.3 分解策略
針對規則約束和關系約束后的子任務集合,已經具備了可以執行任務進一步分解的條件,為了使任務分解為元任務,便于對應相應功能模塊,實現指揮過程精簡,需對任務集合執行分解策略S。子任務集合執行分解策略S 后,分解為任務樹,構成任務網絡N。具體分解策略如下。
輸入:子任務集合
輸出:作戰任務分解樹
分解過程:
1)確定任務
根據衍生子任務集經過約束之后的有序任務集確定目前的諸多任務。
2)判定性質
通過判定該任務是否具有可分解性從而做出判斷,若具備可分解性則繼續執行分解操作,反之停止分解。對此,判定標準如下:
(1)該任務是否是元任務。本文將元任務定義為“以戰場態勢所確定的作戰任務中處于架構底層的任務,是最基礎的任務形式和最小的分解任務單元[5],與作戰行動直接對應,且不能夠被分解為子任務的任務”。若判定為元任務則不可被分解,若不是元任務則需要繼續分解。
(2)該任務是否是實際相關任務。本文將實際相關任務定義為“在作戰任務執行過程中,與核心任務方向相同并且與作戰內容實際相關,會對戰斗效果產生實質影響的任務”。若判定為實際相關任務則可進行分解,若不是則無需進行不必要的分解。
以上兩種判定標準為同級規則,同時判定不分先后,且當同時符合兩種標準時,才能夠具備可分解性,并執行下一步驟。
3)任務拆解
將任務按照既定流程實施拆解,拆解遵循“任務牽引”原則、“扁平簡要”原則和“作戰單位匹配”原則。
(1)原則一:任務牽引原則
以任務主線和作戰目的為牽引,針對被分解的任務本身以及下階段作戰意圖對任務實施分解。例如對“火力打擊”進行任務分解,通過對作戰背景分析得到作戰意圖是首先摧毀敵通信節點和指揮機構,隨后對敵實施殲滅戰,則根據任務牽引原則將“火力打擊”分解為“精確打擊”和“炮火覆蓋”兩個任務,緊貼作戰意圖和任務實際。
(2)原則二:扁平簡要原則
“扁平”指基于當前需分解任務進行橫向扁平化分解,在同次分解過程中通過分析盡可能拆解任務,避免任務分解縱深化,根據作戰實施情況綜合考慮多方面因素,對本級任務全面考量,不遺留模糊任務至子任務分解;“簡要”指不做作戰計劃范疇以外的任務分解,所有按照程序進行的分解對于本級任務不擴展聯系,僅就任務涉及的領域、裝備、人員等實施拆解,簡明扼要,避免冗余。
(3)原則三:作戰單位匹配原則
為了使任務能夠更適應作戰及指揮員指揮實施,某些需要較多作戰單位執行的任務可分解為簡單任務,即越少數量作戰單位參與的任務,簡化指揮結構,明晰作戰分工。令作戰任務為集合A,作戰單位為集合B,兩者間關系為一對多,根據作戰單位匹配原則,減少一對多的匹配關系,使集合A中的元素在B中映射盡可能少的元素。
任務拆解之后,得到作戰任務分解樹。
4)任務檢查
對照任務性質及拆解原則,檢查其是否仍具備繼續分解的條件,若有缺失則補充完善任務,確保任務分解徹底、完整。
作戰任務分解策略流程圖如圖2所示。
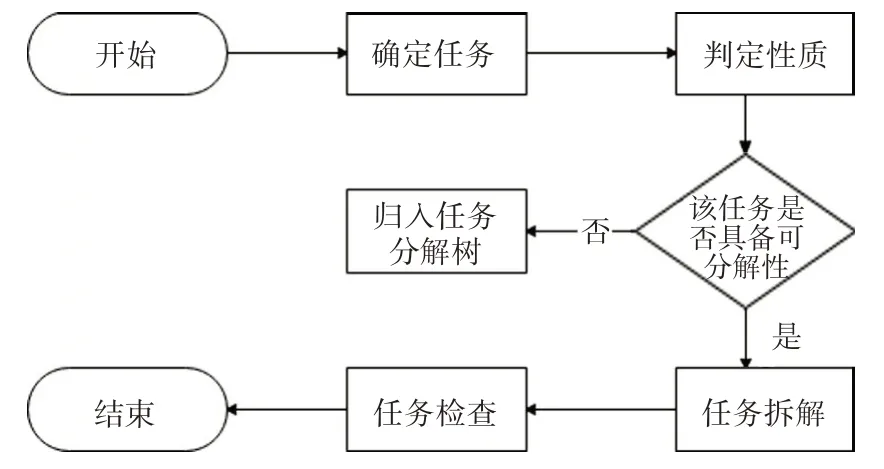
圖2 作戰任務分解流程圖
4 案例分析
4.1 案例描述
作戰雙方設定為紅藍雙方,紅方為進攻方,執行奪占陣地任務,藍方為防守方,執行防御任務并具備適應戰場的多種防御能力。目前,紅方已經完成了進攻前戰斗部署和兵力武器調配。本次任務目標是破壞藍方通信設施及通聯手段,摧毀藍軍陣地防御體系,最終奪占陣地。
藍方防御陣地主要位于961 高地。進攻方向上藍方設有混合雷場。藍方前沿陣地設置觀察哨、游動哨,設多道塹壕,塹壕之間設多處暗堡以及火力點。961 高地不同高程點共設三處通信節點,藍方指揮所在高地頂端。
961 高地北側100m 有藍軍炮兵陣地,可為藍方提供強有力火炮支援,東南方向10km 處有藍方后援部隊約一個營,可在較短時間內機動至高地對藍方實施增援。
961 高地向東6km 處有中型橋梁,可供藍方人員及車輛機動,是唯一的后撤路線。
4.2 作戰任務分解
依照上文的作戰任務分解步驟,對作戰案例的描述進行作戰任務的確定和分解。
1)本級作戰任務確定
根據案例描述,可以確定核心作戰任務為“奪占陣地”,為作戰任務分解樹的根節點。
2)任務規范化描述
根據任務想定,mask=“奪占陣地”,基本作戰要素多元組為
<名稱=“奪占陣地”
參戰力量=“指揮控制營、警衛營、戰術機動營、炮兵營、防空營、裝甲營、火力支援營、綜合保障營”
作戰指標=“占領陣地、摧毀敵通信設施、殲滅藍軍、遲滯并消滅藍方增援部隊”
作戰行動=“偵察預警、火力打擊、地面突擊、信息保障、火力支援、后勤保障、裝備保障”
時間=“20220515/9:00,20220517/8:00”
環境=“山地丘陵,晴轉多云,存在電磁干擾”>
3)作戰場景建模
根據任務想定,作戰場景建模為
{敵方企圖=“敵計劃、敵目標、敵動向”
{敵計劃=“遲滯我軍進攻,嚴防死守高地,等待友軍支援”
敵目標=“打退我軍進攻行動,打亂我軍戰斗部署”
敵動向=“前方防御,重心后移,加強火力”}
敵方部署=“兵力部署,位置部署”
{兵力部署=“人員{人員編成{炮兵營,偵察連,裝甲營,指揮部},人員職能},武器{武器種類、武器性能、武器數量}”
位置部署=“防御工事,火力點,通信樞紐{位置{指揮部,中部轉接站,前沿電臺}}”}
環境=“自然環境{地貌{山地,丘陵}},人工環境{雷場,障礙,塹壕},電磁環境{有電磁干擾}”
}
4)關鍵詞提取構建
根據針對“奪占陣地”的作戰場景建模,從中提取關鍵詞,通過對其任務貼合度進行分析,最終確定子關鍵詞集合,確定子關鍵詞后同樣能夠確定關鍵詞鏈路。子關鍵詞集合為
{“等待友鄰支援”、“重心后移”、“指揮部”、“中部轉接站”、“前沿電臺”、“山地”、“丘陵”、“有電磁干擾”}
5)任務細化與機制匹配
將子關鍵詞集合與任務境況根據匹配規則進行匹配,形成衍生子任務集合:
{“阻擊并殲滅援軍”、“損毀橋梁”、“實施包圍”、“精確打擊”、“越野機動”、“遠程火力覆蓋”、“摧毀敵電磁干擾設備”、“破除障礙”、“摧毀敵哨所”、“摧毀敵火力點”、“摧毀敵炮兵陣地”、“殲滅藍軍”、“占領陣地”、“防敵炮火襲擾”、“信息保障”、“后勤保障”、“裝備保障”
}
6)規則約束和關系約束
將上述衍生子任務集合及任務景況中涉及的任務對照相關約束條件重新規劃調整細化,得到進一步的任務集合為
{進攻任務
{“正面火力壓制”、“遠程火力覆蓋”、“精確打擊”、“摧毀敵哨所”、“摧毀敵火力點”、“摧毀敵炮兵陣地”、“摧毀敵電磁干擾設備”、“損毀橋梁”}
防御任務
{“防敵炮火襲擾”、“防敵電磁干擾”}
保障任務
{“信息保障”、“后勤保障”、“裝備保障”、“越野機動”}
殲滅任務
{“殲滅藍軍”、“阻擊并殲滅援軍”}
排障任務
{“破除障礙”}
7)執行分解策略
通過對現有任務進行性質判定,發現存在作戰任務“正面火力壓制”、“遠程火力覆蓋”、“精確打擊”、“防敵炮火襲擾”、“防敵電磁干擾”、“信息保障”、“后勤保障”、“裝備保障”、“越野機動”、“殲滅藍軍”、“破除障礙”均不是元任務,可以進一步拆解。
根據三項原則,可進行如下拆解:
將“正面火力壓制”分解為“摧毀敵掩體”、“構建火力前沿”、“集中炮火壓迫敵火力”;將“遠程火力覆蓋”分解為“雷達定位”、“遠程制導”、“區域打擊”;將“精確打擊”分解為“雷達定位”、“精確制導”、“斬首行動”;“防敵炮火襲擾”可分解為“地對空防御”、“地對地防御”、“雷達探測”、“預警反饋”;“防敵電磁干擾”可分解為“電磁屏蔽”、“無線電靜默”、“濾波控制”;“信息保障”可分解為“通聯環境搭設”、“信息傳輸檢查”;“后勤保障”可分解為“物資器材保障”、“醫療保障”;“裝備保障”可分解為“車輛檢修”、“槍械核查”、“裝備檢驗”;“越野機動”可分解為“日間隱蔽機動”、“夜間快速機動”;“殲滅藍軍”可分解為“敵軍清剿”、“武器繳獲”、“戰場清理”;“破除障礙”可分解為“工程排雷”、“障礙清理”。
對拆解后的任務進行任務檢查,未發現分解不徹底、不完整的作戰任務。最終構建的作戰任務分解樹如圖3所示。
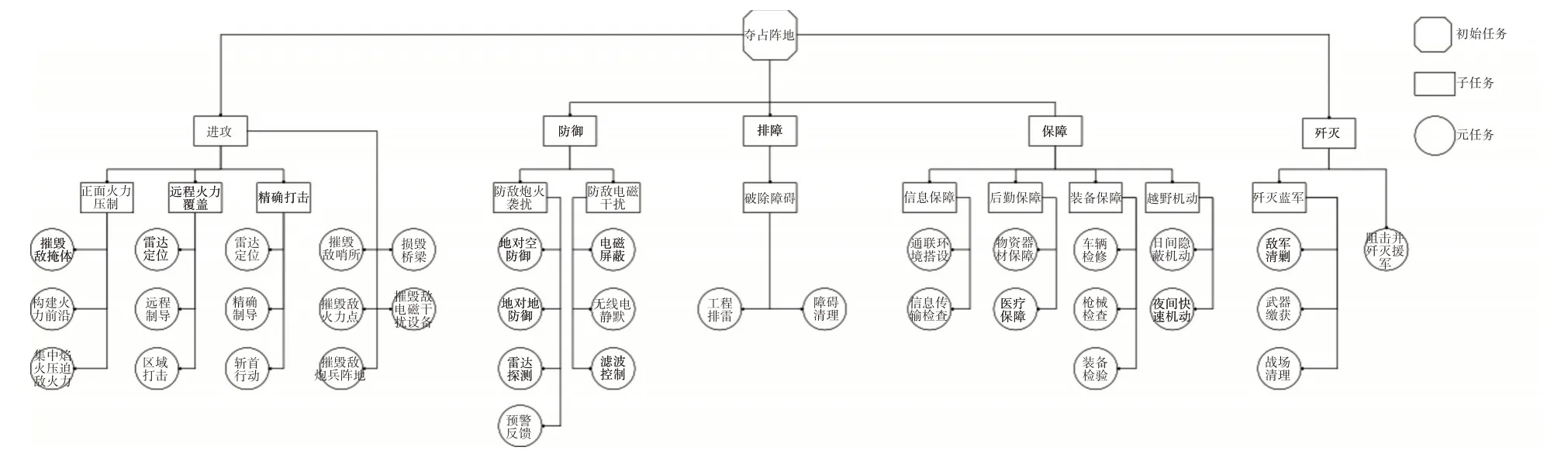
圖3 作戰任務分解樹
5 結語
目前,對于作戰任務的分解幾乎是基于相關人員的經驗,采用類似于DoDAF[10]和MODAF[11]中的使命任務模型來表示,存在漏洞和不恰當情況。本文建立了作戰任務實時分解的概念架構、設計了作戰任務分解的方法步驟以及流程算法[12]。其中,作戰場景的明確、敵我力量的熟悉對比以及緊貼實戰的任務實施是關鍵。本文旨在基于作戰場景,通過關系梳理及相關規則約束,對初始任務執行系統化拆解,最終形成明確、條理、實際、可執行的任務樹網絡,極大方便指揮員及指揮機構進行時效性指揮,使信息化戰爭中的作戰任務分解達到既定目標。
