無人機蜂群作戰及其關鍵技術研究*
2023-06-05 00:49:58彭正忠歐青華
艦船電子工程 2023年1期
彭正忠 歐青華
(廣州市花都區擁軍路21號 廣州 510800)
1 引言
自海灣戰爭以來,無人機在戰爭中的應用領域不斷拓展,深刻影響著戰爭的走向。隨著無人機的不斷發展完善,其應用范圍不斷擴大、規模數量不斷增多、作戰樣式不斷翻新,作戰運用已從空中偵察、戰場監視、電子對抗向通信中繼、精確打擊和后裝保障等領域延申,正在逐步由輔助作戰手段向基本作戰手段過渡。綜合來看,無人機在軍事上可代替有人機執行四類任務,即4D 任務(枯燥乏味、環境惡劣、危險性高、深入敵方;Dull,Dirty,Dangerous and Deep)。
20世紀60年代,法國生物學家皮埃爾·保羅開始了關于智能蜂群(Swarm Intelligence)的研究。通過對自然界各類昆蟲群體的深入觀察分析,皮埃爾·保羅發現某類昆蟲群體內部存在高度結構化的組織,個體之間分工明確,協同工作,能夠完成遠遠超出單一個體能力的復雜任務。其中,蟻群是最具代表性的群體,單體之間通過簡單的信號傳遞,就能實現較成熟的溝通協調,從而表現出某種規模化的集群智能行為。在此現象的基礎上,人類不斷深入研究昆蟲之間的集群行為,最終得出了如蟻群算法(ACS)和粒子群優化算法(PSO)等諸多智能集群算法。
2 作戰樣式
目前,比較具有代表性的無人機蜂群作戰概念主要有兩種,分別是“集群作戰”系統與“忠誠僚機”系統。上述兩種概念在某種程度上均屬于協同作戰,但協同的對象卻有很大不同。“集群作戰”系統存在于大量小型無人機之間,體現的是機-機協同;“忠誠僚機”系統存在于有/無人機之間,體現的是人-機協同。

圖1 全球鷹無人機

圖2 蜂群
2.1 忠誠僚機
1)協同探測
在有/無人協同探測過程中,主要可采取以下三種方式完成任務:
(1)由無人機前置負責探測目標,可通過有源機載雷達傳感器對目標實施定位。然后通過數據鏈將目標信息傳送至后方有人機,有人平臺負責信息處理、威脅評判和打擊決策。
(2)有人平臺通過其有源雷達傳感器對目標進行照射,多架無人機前置接收反射波,通過無源定位的方式完成探測,再將目標信息回傳至有人機,該方式降低了目標起伏特性,擴展了探測距離。無源定位的精度與各接收站的位置密切相關,因此,可充分利用無人機的機動性,實時調整排布方式,提高定位精度。
(3)前置部署的無人機蜂群可根據敵方目標自身的輻射信息,直接實現無源定位,并通過數據鏈向長機或有人平臺傳遞相關數據,完成對目標的探測偵察。
2)協同攻擊
在有/無人協同攻擊方面,每架無人機均可裝配不同的任務載荷,如雷達、光電、紅外、電子支援設備,以及各類不同類型的攻擊性武器。在有/無人編隊中,長機或有人平臺負責指揮多架無人機執行攻擊任務,實現分布式協同作戰。長機或有人平臺對敵目標發射武器,無人機發揮中繼制導作用,擴展武器殺傷距離、提高打擊效率。在執行任務時,小型無人機能夠增加編隊作戰的殺傷鏈配置選項,降低大型有人平臺探測、對抗威脅目標的成本。在整個作戰過程中,長機或有人平臺負責目標探測、識別跟蹤、信息處理、目標打擊等任務分配,并通過數據鏈傳輸給無人僚機,指揮無人機完成作戰各類任務。

圖3 有/無人編隊壓制敵方防空系統
2.2 集群作戰
1)協同探測
無人機集群作戰的最大優勢在于體系的區域分布性,最大特征是單元的自主特性以及“去中心化”。在目標探測方面,小型無人機自身具有低截獲率、低檢測率等的特性,可在潛入敵方作戰區域甚至后方執行遠程偵察任務。由于小型無人機重量輕、尺寸小等原因導致個體功能單一,所以需要多架小型無人機密切聯系,才能實現集群協同探測。外輻射源探測是通過我方特定的輻射源照射敵方目標,再根據外輻射源的直達波與目標的反射回波相結合,進行數據處理實現那對目標的定位。外輻射源可以采用地面電臺、雷達,也可以利用我方的無人機搜索發現敵方的外輻射源,如機載照射源、預警機等,達到為我所用的目的。
2)協同攻擊
無人機集群作戰是由大型運輸機或戰斗機等攜帶大量小型無人機,在特定空域釋放,迅速完成編隊后對目標實施攻擊。集群式作戰網絡基于各平臺的位置、任務參數、載荷能力、預期效果,為每一項優先作戰任務選擇分配最適合的無人機。主要是由蜂群內個體之間通過三角定位等無源定位與瞄準技術,綜合多個平臺上的偵察資源、集中統一進行動態的任務分配,為引導目標信號干擾提供決策,壓制敵方防御系統、切斷敵方通信或向敵方數據網絡中植入惡意代碼,實現“cyber攻擊”等。
3 作戰優勢
對于蜂群作戰的優勢,美國國防智庫在《戰場機器人時代》的報告中曾在理論上進行了證明。在戰爭理論中,有一個基礎性理論——Lanchester 定律。交戰方的有效戰力,與其戰斗單位數的平方及每個戰斗單位的平均毀傷率系數的乘積成正比,如果我方武器系統的單個戰斗單位的平均效能為敵方的4 倍,則敵方在數量上集中2 倍于我方的兵力就可抵消我方武器在質量上的優勢。

圖4 Lanchester定律
另外,無人機蜂群作戰還有著更低的成本和更小的費效比。根據奧古斯丁定律可知飛機的單價是指數增長的。而同時國防預算通常是線性增長的,所以一個直接的結果就是各國空軍所擁有的飛機數量越來越少。單架飛機的成本及任務量都大大增加,在反介入/區域拒止環境下費效比太高。
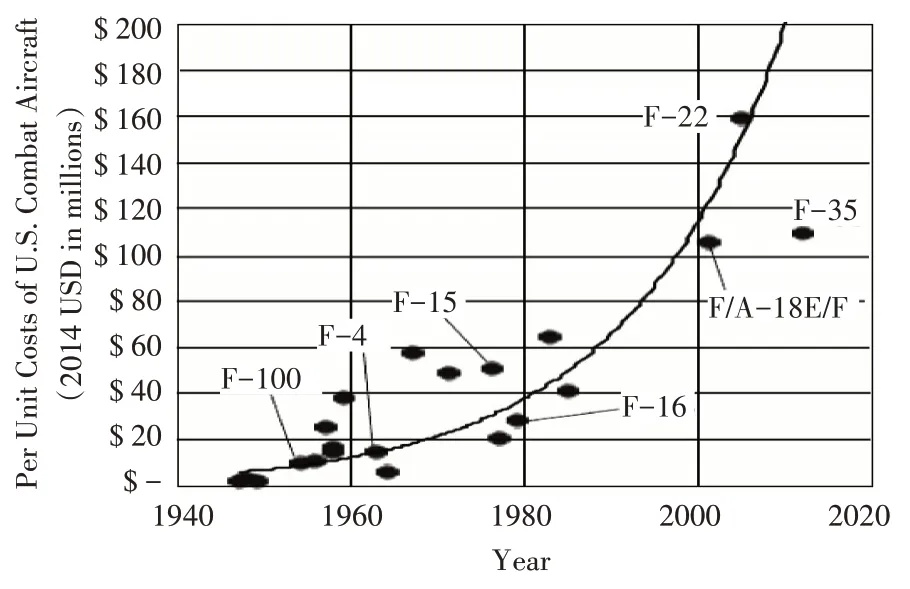
圖5 美國年度飛機造價變化圖
綜上可知,與功能復雜且全面的單一作戰平臺相比,無人機蜂群在作戰時具備以下優勢:1)功能分布化;2)體系生存率高;3)效費交換比高。
4 關鍵技術
為了更進一步弄清無人機的自主作戰能力,美國海軍研究辦公室及空軍研究實驗室(AFRL)定義了10 個自主控制級別(Autonomous Control Level,ACL)對無人機自主程度進行量化衡量。其中最高等級為完全自主集群,這一最高控制等級要求智能無人機蜂群系統在復雜環境下實現無人多任務目標全自主規劃,如圖6所示。
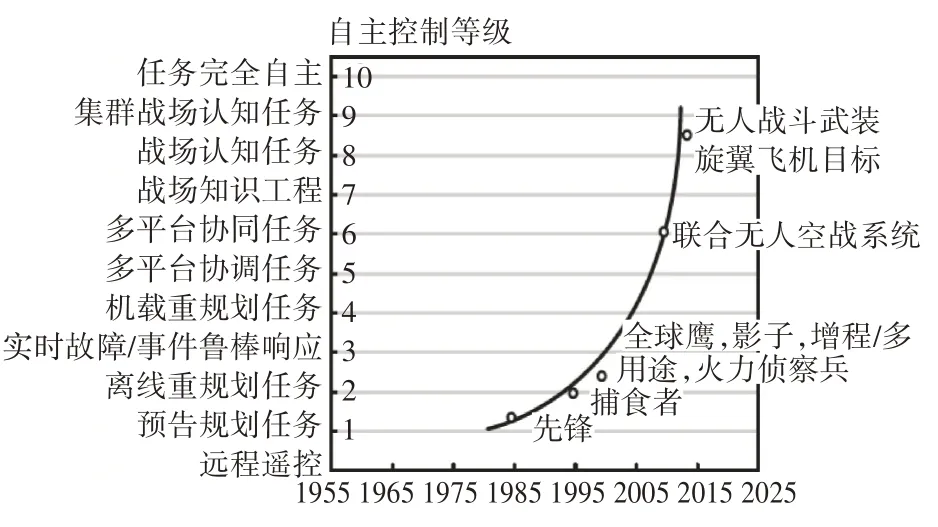
圖6 美軍無人機自主控制等級
目前,中美兩國在智能無人機蜂群領域的研究處于領先地位,但無人機蜂群受機體性能限制,還不具備遠距離、高自主的作戰能力。距離完全實現無人機蜂群的自主控制,還有很長一段距離,需要攻克的關鍵技術主要有:環境感知與認識、多機協同任務規劃與決策、信息共享與自主控制等。
4.1 環境感知與認識
無人機蜂群系統要具備在復雜環境下執行作戰任務的能力,就必須確保系統能夠準確感知和識別戰場環境。通過蜂群內單體之間的信息交互,不斷增強群體對戰場環境的感知與認識,這是整個系統實現自主控制、進行任務規劃、完成作戰決策的基礎。環境感知與認識技術是利用蜂群內單體攜帶雷達、紅外、光電等任務載荷,收集環境數據信息,通過數據分析與處理發現環境特點及潛在目標,在熟悉戰場環境之后進行目標識別、定位與攻擊。該技術的主要環節包括數據采集與建模、信息傳遞與融合、目標識別與定位等。
4.2 多機協同任務規劃與決策
無人機蜂群系統具備多樣化的能力,能夠在復雜的戰場環境中完成現地偵察、戰場監視、精確打擊、火力引導等任務。確保任務規劃與決策環節高效順暢是發揮蜂群系統效能的前提,該技術的成熟度在一定程度上決定了無人機蜂群系統執行任務時的成本。無人機蜂群系統以如何使收益最大化為基本原則進行任務規劃,綜合考慮戰場空間的特點,單機性能參數以及對環境的適應程度,充分發揮蜂群協同作戰的優勢,實現作戰效益的最大化。
4.3 信息共享與自主控制
規模龐大的無人機蜂群系統主要依靠單體之間的信息共享來實現對環境的認知,路線的調整以及自主控制的迭代。信息共享能夠支持單機選擇性接收自身需要的信息,實時路線調整與自主控制,避免單體之間的碰撞與重復執行同一項任務。無人機蜂群可能會面臨如何保持編隊穩定、抵抗電磁干擾或內部系統故障等問題,這都需要單機情報信息實時共享與自主控制。該技術的主要內容有多機協調與交互、復雜環境下的實時航跡規劃、編隊運動協調規劃與控制,基于故障預測的任務規劃等。
5 結語
隨著世界各國對無人機蜂群作戰的研究不斷深入,其發展趨勢和方向已經較為清晰。綜合來看,無人機蜂群作戰理念已經對現代防空體系造成了嚴峻挑戰,只有摸清其發展現狀、趨勢及特點規律,才有可能弄清無人機蜂群作戰的制勝機理,在未來作戰中掌握主動權。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02