基于知識圖譜嵌入學習的目標意圖智能識別方法*
2023-06-05 00:49:50衣軍波蔡林恭余舟川
艦船電子工程 2023年1期
龔 誠 衣軍波 蔡林恭 余舟川
(91001部隊 北京 100841)
1 引言
由于軍事科技的不斷發展,戰場環境的復雜性和信息不對稱性不斷增加,僅憑個人經驗不能實時準確地識別敵方目標意圖,因此需要智能識別預測方法。近年來,學者們建立了不同的智能模型來研究不同領域的意圖識別問題,在空戰目標意圖識別領域,文獻[1]綜合分析了軌跡與戰術之間的相關性,利用深度神經網絡對識別單個空中目標的作戰意圖。文獻[2]研究了一種在不完備信息條件下基于信息熵的空中目標意圖預測方法,可以對目標協同作戰意圖進行有效識別。文獻[3]提出了一種基于不完全信息的LSTM 網絡的空戰目標意圖預測模型,采用自適應矩估計(Adam)優化算法來加快目標意圖預測模型的訓練,有效解決了局部優化問題。文獻[4]利用目標信息特征集合以及戰場目標的作戰屬性與對抗狀態間的聯系性,建立模糊推理模型和模糊推理規則識別目標意圖。文獻[5]利用專家先驗知識構建聯合貝葉斯網絡識別模型來識別目標戰術意圖。雖然上述方法對目標常規戰術意圖識別有較好的效果,但無法有效解決復雜戰場環境下的目標意圖識別問題。另外,在分類器中加入不同線性度和相關度的特征會降低一些標簽的識別率,影響模型的可解釋性。在車輛駕駛員制動意圖識別領域,不同類型的神經網絡通過學習累積樣本數據來提高意圖識別的準確性[6~7]。SVM 用于提取低相關參數的特征,然后將提取的結果和高相關特征用于數據挖掘,進一步提高了車輛駕駛員制動意圖識別的準確性[8]。在用戶意圖識別領域,文獻[9]提出了一種啟用自動編碼器和基于k-means聚類(AKMC)的方法來識別潛在用戶,在仿真實驗中,該方法的準確率達到了80%以上。文獻[10]提出了一種雙向網格長短期記憶RNN 框架,用于提高用戶意圖識別的效率。通過綜合分析上述研究成果,學者們普遍使用機器學習來解決意圖識別問題,所選參數特征的相關性和完整性是影響識別結果準確性的關鍵因素。然而這些研究并未能夠充分考慮戰場因素之間的關聯性,在復雜戰場環境下意圖識別的準確性不高。
因此,本文利用知識圖譜嵌入學習技術,通過目標意圖知識圖譜來組織多源異類戰場情報數據,構建目標活動因素關聯關系網絡,形成跨時空、跨任務、跨實體等多維度的信息理解能力,實現在復雜戰場環境下對目標作戰意圖智能識別。
2 目標意圖知識圖譜
2.1 知識圖譜架構
在邏輯架構上戰場目標意圖知識圖譜可以分為模式層和數據層兩個方面,如圖1所示。模式層建立在數據層之上,通過形式化的方式描述相關公式、規則、概念實體、關系等模式信息,如圖1(a)所示。數據層含有許多實例與實例之間的關聯關系,是模式層的實例表示,如圖1(b)所示。屬性層主要是目標本身固有的屬性信息,這些屬性是用于目標意圖分析的參數,如:飛機本體有最大速度、最小速度、巡航速度和巡航高度、最大加速度、最大減速、最大過載爬升、最大過載俯沖等。特征層以各種特征為基本節點,節點信息主要包括特征類型和特征參數等,例如傳感器狀態、機動類型、環境狀態、我方目標狀態等;而意圖層的節點信息主要包括目標實體意圖間的包含關系、關系值域、關系約束等。
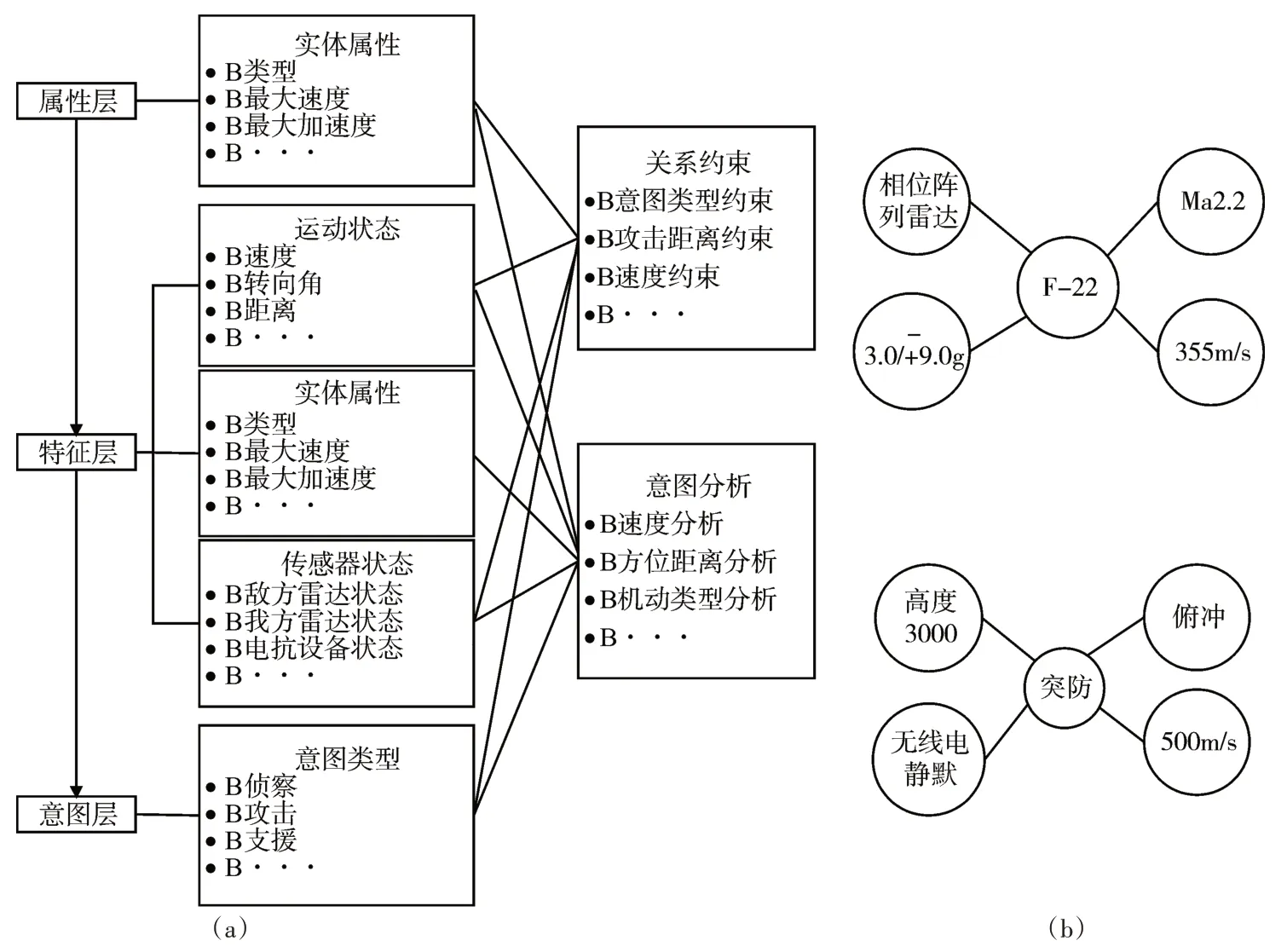
圖1 知識圖譜模型
2.2 知識圖譜構建
目標意圖知識圖譜的構建是一個動態循環的過程[11],如圖2所示。首先利用知識表示技術,結合可視化建模方法,對概念層、屬性、規則等進行定義,明確概念和概念之間的語義關聯,實現多層級領域知識體系構建;然后通過實體識別、關系抽取等知識抽取相關技術從結構化、半結構化、非結構化的數據中自動化地提取實體、關系、屬性、事件等知識要素;之后利用實體消歧技術、實體鏈接技術消除實體、屬性、關系、事件等知識對象之間的矛盾和歧義,利用知識合并技術來合并重復的知識;之后則是利用知識推理、知識計算、知識補全等技術,從知識庫中已有實體關系數據出發,經過推理和計算,建立實體間的新的關聯關系,從而擴展更新知識網絡,最終形成目標意圖知識圖譜;在目標意圖知識圖譜應用過程中,會反饋出新需求新概念,指導目標意圖領域認知框架的補充與完善[12]。
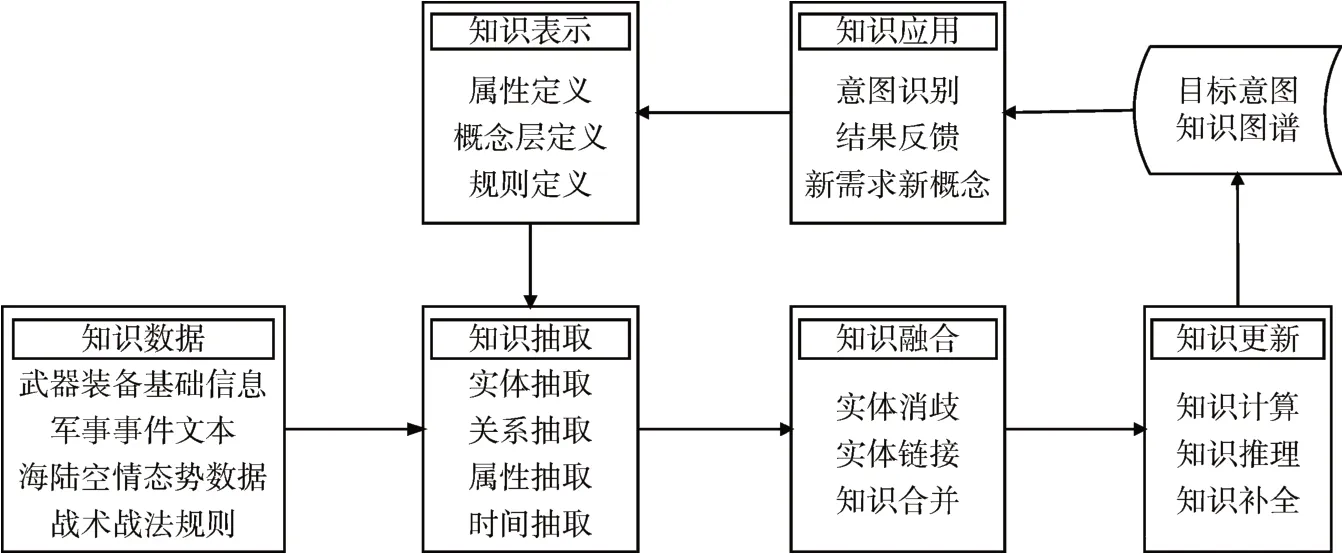
圖2 知識圖譜構建過程
3 基于知識圖譜嵌入學習的意圖識別
3.1 知識圖譜嵌入學習
為了方便戰場目標意圖識別任務的使用,我們可以利用知識圖譜嵌入學習技術來獲取實體和關系隱含的語義信息。每一個戰場目標在目標意圖知識圖譜中都會有其它的實體通過直接關系相連或者間接關系路徑與其相連,這些關系主要包括錄屬關系、包含關系、協同關系等,這些實體可以看作是目標的屬性,結合目標固有的屬性信息和目標狀態信息,能一定程度上反映目標的意圖傾向,可以通過嵌入傳播方法來利用這些知識信息。
我們定義實體和關系路徑的集合用來表示目標實體的傳播信息,公式如下:
其中Si(0)={(<>,i)} 為最初的集合,Si(1)={(<r2,e3>,i),(<r3,e4>,i)},以此類推;||表示將關系r放到關系路徑pl-1的后面形成一個新的路徑,pl表示從目標實體i開始傳播到第j跳的關系路徑。
目標-關系路徑的注意力權重為
目標-實體路徑的注意力權重為
歸一化得到最后的最終的權重:
對權重信息進行線性組合可以得到:
因此可以得到所有L跳實體嵌入信息的集合Γi,如下所示:
3.2 目標意圖識別模型
將集合Γi里的進行求和操作,可以得到新的嵌入e*i:
再通過SVD++方法將目標間的協同信息結合到目標的嵌入中,則可以得到目標u的嵌入u*:
其中T(u) 表示為與目標u交互過的意圖集合。
然后對u*和e*i進行內積操作,可以得到預測目標對意圖的概率分數:
3.3 損失函數
給定目標意圖知識圖譜G 和交互圖Y,對上面的預測模型進行最大化后驗概率模型參數θ:
max p(θ|G,Y)
其中,θ包括參數矩陣、偏置項向量、目標實體的嵌入、意圖的嵌入等。利用貝葉斯理論,上式可轉換為
利用極大似然估計理論,可以得到目標損失函數?:
4 實驗分析
因為意圖識別是一個分類問題,因此可以使用精確率、召回率、F1-分數來驗證方法的有效性,它們的定義為
其中真正數、假正數和假負數的含義如表1所示,真正數是預測值為正樣本且真實值也為正樣本的數量,假正數是預測值為負樣本而真實值為正樣本的數量,假負數是預測值為正樣本而真實值為負樣本的數量,真負數為預測值為負樣本且真實值也為負樣本的數量。

表1 混淆矩陣
采用某作戰仿真系統中的數據,研究本方法在對海作戰模式下對目標意圖識別的整體有效性。分別采用基于知識圖譜嵌入學習的目標意圖智能識別方法①、基于注意力機制的長短期記憶網絡的目標意圖識別方法②、基于深度神經網絡的目標意圖識別方法③、基于模糊推理的目標意圖識別方法④,這四種方法識別目標意圖,對比分析模型訓練過程和識別結果。
從圖3損失函數值變化情況可以看出,從左往右隨著訓練的迭代次數增加,四種意圖識別模型方法的損失函數值總體情況均逐漸下降,最后趨向于一個穩定值,其中基于知識圖譜嵌入學習的目標意圖智能識別方法損失函數值最小,優于其他三種識別方法。

圖3 損失函數值變化情況
識別目標意識所用的識別時間也是評估模型效果的一個重要指標,表2是在兩個不同的作戰場景采用四種識別模型對目標意圖進行識別所消耗的時間,從表2中可以得知,采用基于知識圖譜嵌入學習的目標意識智能識別的方法在四種方法中所消耗的時間最少,平均單次識別時間為1.20s。
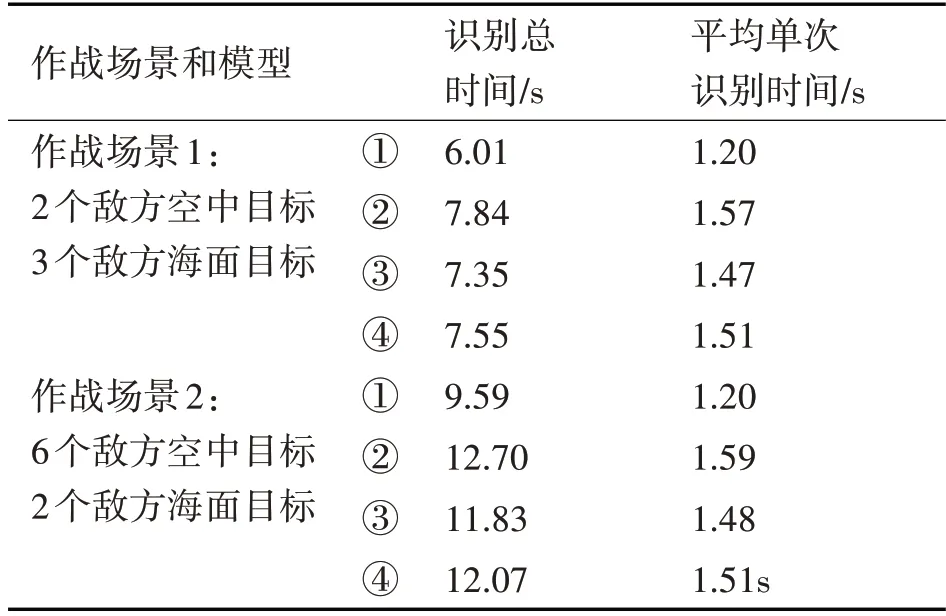
表2 不同作戰場景和識別方法下的目標意圖識別時間對比
從表3中可以得到四種方法對于撤退意圖的識別率較高,而突防意圖識別率較低,經綜合分析,撤離意圖的目標態勢特征與其它意圖區別最大,更易識別,而突防與攻擊的態勢特征接近,更難識別。基于知識圖譜嵌入學習的目標意圖智能識別方法對各類型的意圖的識別在四種方法中精確率、召回率、F1-分數均最高,表明本文所提方法對目標意圖進行識別的準確度最高。

表3 目標意圖識別性能度量
5 結語
針對當前戰場目標意圖識別方法戰場態勢情報信息利用率低、識別準確率不高的問題,本文引入知識圖譜嵌入學習技術,提出了一種基于知識圖譜嵌入學習的目標意圖智能識別方法。利用知識圖譜的可變動態數據模式、語義信息豐富、關聯清晰等優點,可以有效解決多源異構情報信息孤島問題,提高目標意圖識別的準確性。通過實驗分析結果可以得知,基于知識圖譜嵌入學習的目標意圖智能識別方法識別精度較高,平均識別時間短,能夠充分利用復雜環境下戰場因素之間的關聯關系信息獲取識別特征,擁有較好的魯棒性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32