任意路徑航行的水下航行器回波特征研究
2023-06-13 09:12:18韓林江陸金銘劉進(jìn)偉彭子龍
艦船科學(xué)技術(shù) 2023年9期
韓林江,陸金銘,劉進(jìn)偉,彭子龍
(江蘇科技大學(xué) 能源與動力學(xué)院,江蘇 鎮(zhèn)江 212003)
0 引 言
水下航行器的隱蔽性決定了其戰(zhàn)斗力與生命力。為了提高其隱蔽性以及有效躲避水下聲學(xué)探測,水下航行器往往需要采用各種不規(guī)則路徑航行。開展面向收發(fā)合置聲吶探測模式下水下航行器任意航行路徑的時域回波特征研究,突破運動中水下航行器目標(biāo)時域回波計算方法,是當(dāng)前水下航行器隱蔽路徑規(guī)劃以及對運動中水下航行器探測等課題中亟需解決的問題。
有限元?完美匹配層聯(lián)合仿真計算方法有著適用頻率范圍廣、計算精度高、計算方法成熟等優(yōu)點,是當(dāng)前處理聲學(xué)散射問題常用的數(shù)值計算方法。隨著入射信號頻率的增大,以及目標(biāo)與聲波發(fā)射接收點距離增加,為了提高計算精度,需要的有限元體網(wǎng)格數(shù)量將成倍增加,采用上述計算方法需要大量的計算資源。為了能夠有效提高中高頻聲學(xué)散射問題的計算效率,克服高頻計算量大的問題,范軍[1]、鄭國垠等[2]提出并改進(jìn)了板塊元方法。該方法基于Kirchhoff近似原理,將目標(biāo)表面用剖分平面板塊元網(wǎng)格的方法近似模擬,最終目標(biāo)的總散射聲場由所有的平面板塊散射聲場疊加而得。經(jīng)過驗證,該方法具有較高的計算精度。賈波等[3]基于傳統(tǒng)板塊元方法,運用切比雪夫多項式插值實現(xiàn)了水下目標(biāo)寬帶回波特征的快速計算。孫乃葳[4]基于改進(jìn)板塊元法,利用Gordon積分方法,同時考慮了優(yōu)化后的模型中面元遮擋計算流程,完成了潛艇目標(biāo)強度的仿真計算,建立了基于改進(jìn)板塊元方法的潛艇目標(biāo)強度快速預(yù)報模型。馮奇等[5]基于板塊元法,研究了近場高頻情況下水下復(fù)雜目標(biāo)聲目標(biāo)強度方向特性。
對于水中動態(tài)目標(biāo)的回波特征,國內(nèi)外學(xué)者已經(jīng)進(jìn)行了一定研究。其中,周華等[6]通過研究目標(biāo)回波信號模型理論,結(jié)合目標(biāo)強度理論得到了圓柱體簡單目標(biāo)近場目標(biāo)強度計算公式,并推導(dǎo)了動態(tài)圓柱體目標(biāo)回波理論。潘明等[7]基于板塊元法分析了潛艇回波在直線運動狀態(tài)以及不同距離條件下的亮點結(jié)構(gòu)分布及其特點。
上述文獻(xiàn)基于板塊元法研究了水下目標(biāo)的動態(tài)回波特征,但仍存在以下不足:1)缺乏實測驗證;2)研究的水下目標(biāo)外形或者運動狀態(tài)單一,無法推廣到一般情況;3)未對水下多目標(biāo)同時運動的回波特征進(jìn)行研究探討。本文從工程應(yīng)用角度出發(fā),考慮單個或多個水下航行器以任意路徑航行的情況,通過構(gòu)建水下航行器幾何模型,采用基于頻域間接法的板塊元方法對其回波特征進(jìn)行研究。最后,通過水下聲散射試驗測試對預(yù)報結(jié)果進(jìn)行了驗證。
1 基于頻域間接法的板塊元基本原理
Kirchhoff近似原理基于如下2個基本假設(shè)[8]:假設(shè)1,散射表面可以分成產(chǎn)生聲波的散射的被照亮區(qū)域,即亮區(qū),以及不產(chǎn)生聲波散射的未被照亮區(qū)域,即影區(qū);假設(shè)2,亮區(qū)反射面的每個局部都可以看成是平面,波的反射特性服從局部平面波反射規(guī)律。
如圖1所示,S為整個散射體外表面,r1和r2分別為散射體表面S到入射點M1和散射點M2的矢徑,θ1和θ2分別為表面外法線方向與入射點M1和散射點M2矢徑間的夾角,V(θ)為散射體外表面反射系數(shù)。
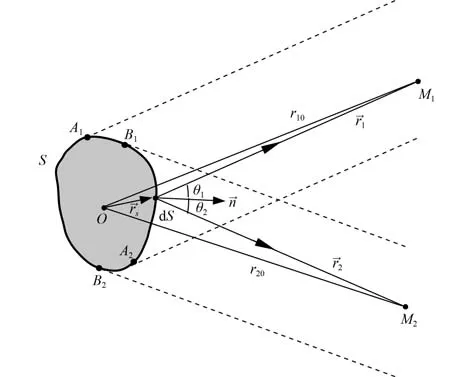
圖1 推導(dǎo)Kirchhoff近似的示意圖Fig.1 Schematic for deriving Kirchhoff approximation
在收發(fā)合置情況下,r1=r2=r,r10=r20=r0,θ2=θ1=θ,通過Kirchhoff近似可求得散射聲場滿足:
其中,θ隨表面上的點而變。再考慮遠(yuǎn)場,可以在指數(shù)上取r=r0+?r,分母上取r≈r0,得到:
目標(biāo)時域回波y(t)的計算過程如圖2所示。x(t)為時域入射信號,X(f)為頻域入射信號,Y(f)為頻域回波信號。目標(biāo)時域回波信號可以表示為:
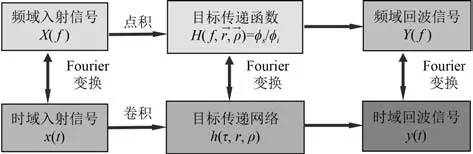
圖2 時域回波信號傳遞網(wǎng)絡(luò)模型Fig.2 Time-domain echo signal transmission network model
其中,?表示卷積運算。根據(jù)信號處理中線性系統(tǒng)時間域響應(yīng)和頻率域響應(yīng)相互對應(yīng)的基本原理,可以得到目標(biāo)的瞬態(tài)回波:
且有:
其中,F(xiàn)和F?1分別為傅里葉變換和逆變換。因此,根據(jù)上述公式輔以快速傅里葉變換和逆變換,就可以間接求出目標(biāo)瞬態(tài)時域回波。
2 任意路徑時域回波特征計算
根據(jù)基于頻域間接法的板塊元基本原理,計算水下航行器目標(biāo)回波特征需要獲得水面艦板塊元網(wǎng)格。水下航行器總長3.20 m,主艇體(不包含尾部推進(jìn)器)長3.00 m,最大直徑為0.39 m。首部為橢球的一半,橢球半長軸為0.38 m。尾部十字舵最前端距首部2.57 m,高0.21 m。尾部導(dǎo)管長0.16 m,最大直徑為0.36 m,螺旋槳由6個相同的葉片組成。利用幾何三維建模軟件,建立水下航行器三維幾何模型模型,如圖3所示。在網(wǎng)格剖分軟件中剖分三角形面網(wǎng)格,每個小板塊的尺寸滿足Rmin>D2/λ條件,以此保證聲波發(fā)射接收點相對于目標(biāo)為遠(yuǎn)場條件。其中,Rmin為達(dá)成遠(yuǎn)場條件的最小距離,D為每個面網(wǎng)格尺寸的最大值,λ為入射聲波波長,并保證有較高的質(zhì)量,共剖分25 934個三角形網(wǎng)格。將網(wǎng)格的節(jié)點坐標(biāo)信息及面單元排列的拓?fù)湫畔?dǎo)出,基于板塊元數(shù)值計算程序,讀取上述網(wǎng)格節(jié)點坐標(biāo)和面元拓?fù)湫畔ⅰ?/p>
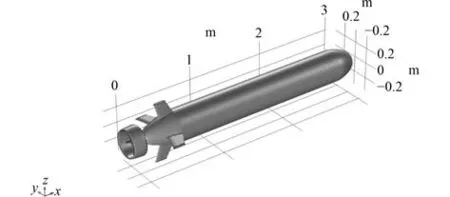
圖3 水下航行器幾何模型Fig.3 Geometric model of underwater vehicle
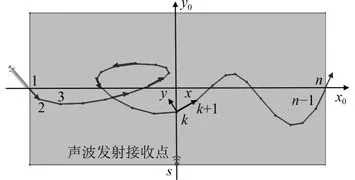
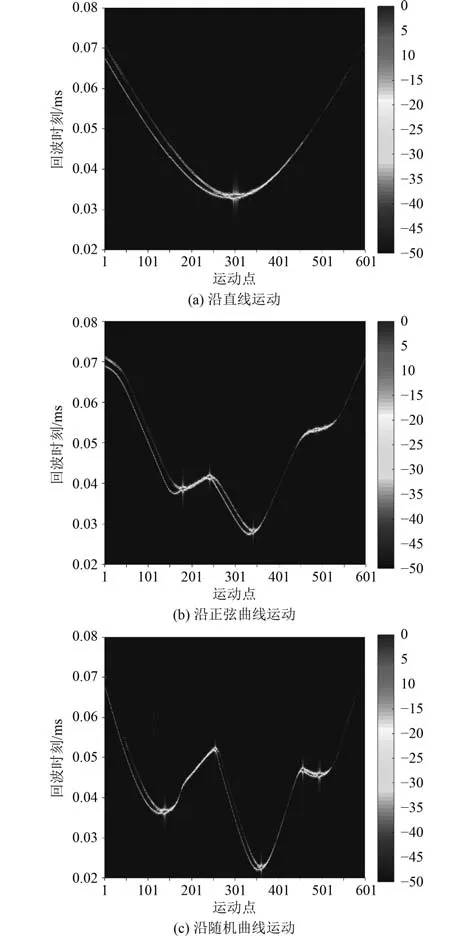
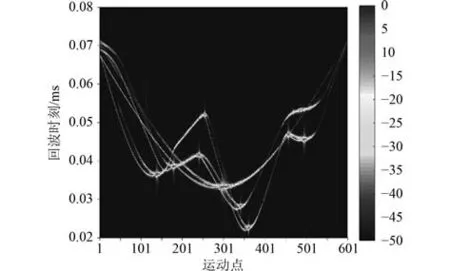
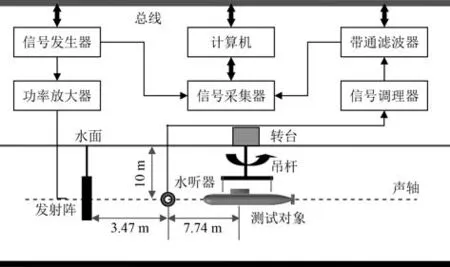
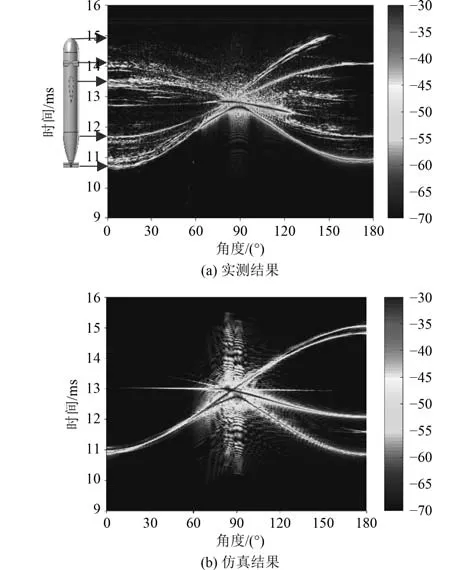
如圖4所示,計算時規(guī)定水下航行器在長60π m,寬100 m的二維矩形平面范圍內(nèi)航行,不考慮其上浮和下潛,航行路徑分別為:1)沿y0=0的直線航行(?30π 圖4 航行路徑Fig.4 Navigation path 如圖5所示,以隨機路徑航行為例,使用COMSOL軟件在航行范圍內(nèi)隨機畫一條開放曲線,將該曲線剖分若干數(shù)量的邊網(wǎng)格,從而獲得該航行路徑曲線上x0-y0-z0坐標(biāo)系下的n個點坐標(biāo)信息,將n個點按照航行經(jīng)過的先后順序編號為1~n,當(dāng)水下航行器航行到任意點k時(k≠n),以k點為原點建立新的x-y-z坐標(biāo)系,定義k到k+1的方向為x軸的正方向,假設(shè)k點在原始x0-y0-z0坐標(biāo)系下坐標(biāo)為(xk,yk,0),k1坐標(biāo)為(xk+1,yk+1,0),則x軸正方向單位向量i可表示為: 圖5 任意路徑航行回波特征計算示意圖Fig.5 Schematic diagram of calculation of navigation echo characteristics in arbitrary path z軸正方向垂直于x-y平面向外,可得z軸正方向單位向量為k=(0,0,1)將x軸正方向和z軸正方向單位向量叉乘,得到y(tǒng)軸正方向的單位向量為: 設(shè)聲波發(fā)射接收點s在原始x0-y0-z0坐標(biāo)系下坐標(biāo)為(p,q,0),則k點到s點的方向向量為:s=(p?xk,q?yk,0)。將向量s分別與向量i和j求點積,得到聲波發(fā)射接收點s在新x-y-z坐標(biāo)系下的坐標(biāo)為: 根據(jù)Sk的坐標(biāo)計算出新x-y-z坐標(biāo)系下聲波發(fā)射接收點與水下航行器在k點的相對位置,從而求得目標(biāo)在該點的瞬態(tài)時域回波,循環(huán)計算每一個航行點的瞬態(tài)回波即可獲得目標(biāo)在整個航行路徑上的時域回波特征。當(dāng)航行到最后一個點n,即k=n時,目標(biāo)航行方向與點n-1一致。 計算中,每個航行路徑都剖分600條邊網(wǎng)格,即最終航行路徑可由601個航行運動點來表示,聲波發(fā)射接收點在x0-y0坐標(biāo)系下初始坐標(biāo)為(0,50)。發(fā)射信號為60 ~70 kHz的線性調(diào)頻信號,脈寬0.5 ms,采樣頻率為1.75E5。 為了提高輸出信號的信噪比并獲得比較精細(xì)的距離分辨率,對目標(biāo)的回波信號做匹配濾波,最終計算結(jié)果分別如圖6所示。 圖6 不同運動路徑下水下航行器時域回波特征Fig.6 Time-domain echo characteristics of underwater vehicle under different moving paths 由圖6可知,水下航行器沿直線運動時,其回波特征由2條U型曲線構(gòu)成,在運動到第301航行點附近時,該航行器回波強度最大,航程過半以后U型曲線由2條變?yōu)?條。這是因為當(dāng)航行器運動到第301個點時整個航行器航行方向正好與聲波發(fā)射方向垂直,此時回波強度最大,且航程過半以后,聲波發(fā)射點矢徑與航行方向夾角大于90°,聲波無法照射到航行器首部,失去了航行器的首部亮點。 根據(jù)上述規(guī)律,不難發(fā)現(xiàn),沿正弦曲線方向航行時,航行器分別在序號為175,251,351和501的點附近航行方向與聲波發(fā)射方向垂直,此時回波強度較大,也是探測到該航行器最容易的區(qū)域。當(dāng)序號在201~251范圍內(nèi),沿正弦曲線運動的航行器回波強度都很強,說明在該區(qū)間內(nèi),航行器航行方向與聲波發(fā)射方向之間夾角變化不大,一直在90°附近。同理,沿隨機曲線運動時,航行器在序號為125,251,351,451和501的點附近回波強度較大,此時航行方向與聲波發(fā)射方向垂直,容易探測。 為了研究水下多目標(biāo)同時運動的回波特征,將上述3種航行路徑的時域回波相干疊加,經(jīng)過匹配濾波后,最終計算結(jié)果如圖7所示。可知,當(dāng)沿3種不同路徑的水下航行器同時航行時,其時域回波包含了單個航行器航行的所有回波特征。 圖7 三路徑同時航行時水下航行器回波特征Fig.7 Echo characteristics of underwater vehicle under three paths simultaneous navigation 為了驗證上述回波特征計算的正確性開展回波特性水下聲散射試驗。 試驗?zāi)P蜑?∶20縮比的單殼體Benchmark潛艇,殼體厚度為3 mm,材料為不銹鋼,其長度為3.2 m。在試驗過程中,按照圖8對試驗裝置進(jìn)行布置。 圖8 試驗設(shè)備布置圖Fig.8 Layout of test equipment 試驗開始時轉(zhuǎn)臺勻速旋轉(zhuǎn),信號發(fā)生器信號經(jīng)功率放大器放大后由發(fā)射陣發(fā)出。發(fā)射陣直達(dá)波和目標(biāo)散射回波由水聽器接收后經(jīng)過信號調(diào)理器和帶通濾波器的補償與限制,最終由信號采集器同步采集獲得,最后經(jīng)過分析計算即可得到1∶20縮比的Benchmark潛艇回波特性。 對于水下航行器任意路徑時域回波預(yù)報的正確性,關(guān)鍵在于對任意聲波入射角度下水下航行器時域回波的準(zhǔn)確計算。經(jīng)試驗測得的Benchmark潛艇在0°~180°(尾部到首部)聲波入射角度范圍內(nèi),60 ~100 kHz頻段時域回波特征實測結(jié)果與仿真結(jié)果對比如圖9所示。 圖9 潛艇縮比模型回波特征試驗和仿真結(jié)果對比Fig.9 Comparison of echo characteristics test and simulation results of submarine scaling model 由圖9可知,1∶20縮比的Benchmark潛艇尾部、首部以及圍殼的回波特征在實測結(jié)果和仿真結(jié)果都清晰可見,且特征十分相似。由此可以確定,利用板塊元法能夠較準(zhǔn)確預(yù)報以任意路徑航行的水下航行器時域回波特征。但實測結(jié)果在首部平衡舵以及尾部錐體部位明顯比仿真結(jié)果多出1~2條曲線特征,實測結(jié)果與仿真結(jié)果仍然存一定誤差。經(jīng)過分析認(rèn)為,這有可能是潛艇旋轉(zhuǎn)時吊放繩索的回波特征。仿真計算時潛艇殼體考慮為剛性殼體,但潛艇實際材料為不銹鋼,這也是實測結(jié)果比仿真結(jié)果回波特征更豐富的原因之一。 本文簡要闡述基于頻域間接法的板塊元基本原理。在此基礎(chǔ)上,提出了以任意路徑運動的水下航行器回波特征預(yù)報方法。進(jìn)一步,通過開展1∶20縮比的Benchmark潛艇回波特性水下聲散射試驗,驗證了上述預(yù)報方法的準(zhǔn)確性。得出以下幾個主要結(jié)論: 1)利用板塊元法能夠較準(zhǔn)確預(yù)報以任意路徑航行的水下航行器時域回波特征; 2)通過對3種不同路徑航行的水下航行器回波的仿真分析,可以確定航行方向與聲波發(fā)射方向垂直時回波強度最大,也是探測到該航行器最容易的區(qū)域; 3)對于給定的航行路徑,可以通過本文的仿真方法獲得該路徑水下航行器最容易探測的區(qū)域,這對水下運動目標(biāo)的探測與識別有一定意義。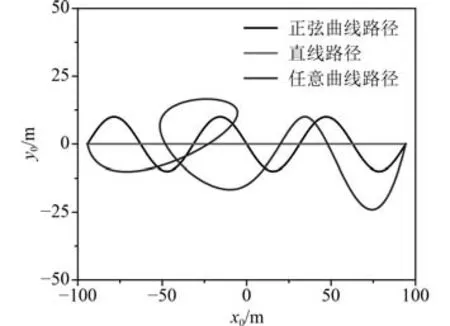
3 水下航行器回波特征湖上試驗驗證
4 結(jié) 語
猜你喜歡
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
小哥白尼(神奇星球)(2020年3期)2020-07-27 01:32:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
股市動態(tài)分析(2016年5期)2016-09-29 12:42:27
太空探索(2015年3期)2015-07-12 11:01:40
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
