無人集群系統火力協同控制體系
2023-06-13 09:12:22管東林王成飛吳鑫輝
艦船科學技術 2023年9期
關鍵詞:系統
管東林,王成飛,吳鑫輝
(中國人民解放軍91977部隊, 北京 100036)
0 引 言
無人作戰平臺因其成本低廉、行動范圍廣、可生產性高、隱蔽性好、避免人員傷亡等優勢,將在未來戰場扮演越來越重要的角色。世界軍事強國紛紛投入巨額資源加大無人裝備研發,無人機、無人艇、無人潛航器等無人裝備初具實戰能力,并在納卡沖突、俄烏沖突等局部戰爭中得到應用,取得了一系列戰果[1–3]。
無人化作戰是未來軍事發展的重要趨勢。作為一種新型軍事力量,無人系統關鍵技術例如無人通信測控技術、無人圖像智能識別技術、無人自主規劃控制技術等迅猛發展,初步具備實戰能力。同時,為了適應未來無人智能作戰需求,無人系統通過“通用平臺”+“模塊化任務載荷”發展方式,大大拓展了無人集群多樣化任務執行能力,從傳統的廣域監視、中繼通信、補給運輸等單一任務向察打一體、通探一體、反艦、反水雷等綜合攻防任務發展[4]。
相比傳統造價昂貴、對人員技能要求高的大型艦船、飛機等平臺,無人集群作戰具有規模作戰優勢、體系生存率高、作戰成本低等非對稱優勢,已成為無人作戰平臺發展趨勢。在未來海戰場應用背景中,無人平臺將體現出多平臺協同工作的特點,即由多臺相同或不同型號的無人平臺組成多無人系統,協同作業、共同完成任務[5]。
現代戰爭中,對于火力的需求不再簡單地指火力密度和速度,而更是指火力的及時性、精確性和高效性。隨著無人作戰系統的發展,研究能夠適應未來戰爭發展的無人集群火力控制體系和協同要素已成為重中之重。
1 無人作戰系統內涵及其分類
1.1 無人系統的內涵
無人系統是和有人系統對應的一個概念。目前定義的無人系統實際上應該被稱為無人化系統,更準確地講是平臺無人化的系統。目前無人系統的概念還在不斷拓展,還沒有一個公認的、標準定義。美軍在2013年公布的無人系統發展綜合路線圖中,將空中無人系統、地面無人系統和海洋無人系統統稱為無人系統,并分別給出了定義。美國國防部無人系統綜合路線圖(2017–2042)將無人系統重點發展方向分為互操作性、自主性、安全網絡、人機協同4個主題,其中,明確了形成有人無人協同作戰能力是未來重要發展目標之一。2021年美海軍發布了《無人作戰框架》,提出了無人系統發展的五大目標,將無人系統發展分為人工操作(Human Operated)、遠程操作(Remote Operated)、人工監督(Human Supervised)、人工-機器編組(Human-Machine Teaming)、自主操作(Near-Independent Autonomy)5個階段,并明確了具體發展內容和目標。隨著無人系統與智能技術的深度結合,無人系統將向無人化、自主化、智能化高速發展[6–7]。
1.2 無人系統的分級
根據自主完成任務的能力,可以把無人系統分為初級、中級、高級和超級4個級別。
1)初級無人系統
主要以傳統的無人平臺遠程遙控方式為主, 即“平臺無人、系統有人”。無人平臺具有一定的感知、處理和執行能力,具備與操作員的交互能力,但不具備決策和學習能力。由人設定任務目的并操控完成任務,典型代表為無人機。
2)中級無人系統
主要以人工遠程控制監督+單平臺自主感知執行結合方式,其中,平臺的任務規劃、任務執行、狀態控制、火力打擊等由人工遠程控制與監督,而平臺具有初級的自主感知、自主識別、自主避障等功能,能自主完成特定的任務。典型代表為無人駕駛車輛,駕駛員輸入目的地,并全程監督車輛行駛,必要時人工干預;無人車則自主識別人、道路和車輛,規劃行進路線,自主避障避險。
3)高級無人系統
主要以人工遠程監督+多平臺集群自主控制為主,無人系統具備一定程度智能水平,能夠根據人工預設的任務要求、角色定位、職責分工,多機協同自主完成隊形變換、戰場偵察、目標識別、火力打擊、效果評估等工作。操縱人員需要在遠程實時監控無人集群行為,并針對突發事件及時干預修正無人集群行為,典型代表為無人機群。
4)超級無人系統
主要以多平臺集群自主控制為主,以人工監督干預為輔。此時,無人系統已具備強大的自主學習進化能力,已經具備自主感知、交互、決策、學習和執行能力,面對各種突發情況時分析決策能力已超過人類水平,形成了類人甚至超人的無機生命,典型代表為科幻的未來無人系統。
本文所研究的無人作戰系統是指高級的,用于作戰的無人系統。
2 火力協同控制體系架構
系統體系架構是復雜系統在其所處環境中的最高層次,是系統組成要素及其相互聯系與互操作性的綜合模型,也是系統設計的觀念與原則的總綱[8]。結合無人裝備的發展,以“有人/無人平臺協同作戰正在成為現代作戰的主要模式”為基礎。無人作戰系統協同火控系統包含了有人、無人、指揮、協同、理解、決策、數據傳輸與信息共享等要素,適應有人/無人武器系統的協同管控,如圖1所示。
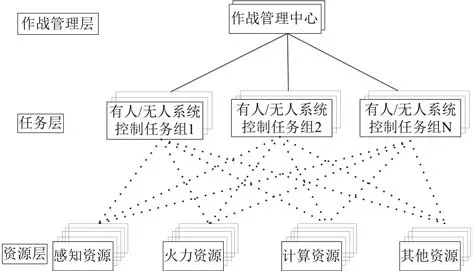
圖1 火力協同系統體系架構概略圖Fig.1 The system architecture of fire cooperation system
火力協同體系架構是一個由有人干預與無人平臺節點組成的多層、多維體系結構,在組成配置上包含無人平臺上的感知資源和計算資源、通信鏈路、系統控制任務組,以及作戰管理中的部分。
在較低的層次上(資源層),這些無人平臺節點所包含的資源生成了面向協同動作的反應式行為;在中間層上(任務層),人工干預或自主分解戰術級作戰任務,形成一系列可用于無人系統實際操作的協同指令和控制指令;在作戰應用層次上(作戰管理層),整個系統在人機交互作用下產生了面向有人/無人作戰集群戰役級作戰任務目標分解,形成一系列戰術級作戰任務。通過構建無人系統層次化火力協同架構,在上下層次之間,實現不同指揮層級無人系統的兵力協同、偵察協同、火力協同等作戰任務分解。在同一層次之間,實現同一指揮層級無人系統感知、認知、想象、推理等行為協同。在低層上,側重于實時作戰行動控制,時間片小(數分鐘至數小時之間)且行為控制精度要求高;反之,在高層上,側重于戰役戰術級作戰籌劃與指揮決策,時間片長(數小時至數天之間)且行為控制精度要求低。通過分層次分解,將“指揮”與“控制”分開,指揮層級更側重于全局性作戰籌劃,控制層級更側重于局部兵力與武器裝備控制。
在任務組各平臺能力均衡情況下,每個任務組的無人平臺采用無中心分布式架構,如圖2所示。每個無人平臺(節點)采用對等的網絡架構,各節點具備完整的自主規劃、定位導航、目標探測、指揮控制、武器打擊能力,通過通信技術,形成節點對等、無中心、具有自組織能力的無人集群系統。
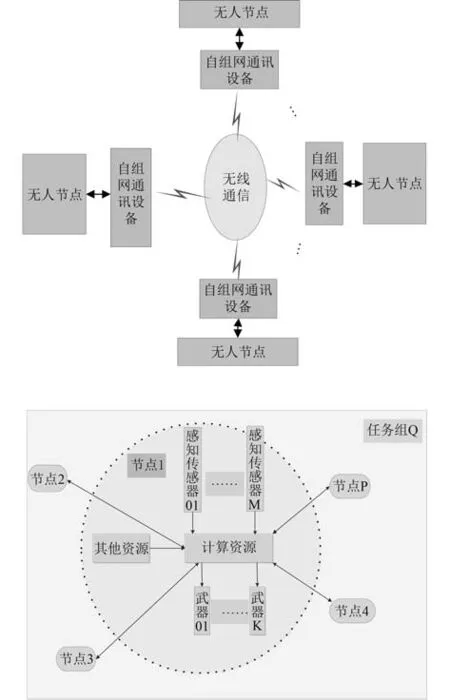
圖2 分布式架構無人作戰系統示意圖Fig.2 The distributed architecture for unmanned combat system
3 火力協同要素
火力協同系統的組成要素,是指在單個有人艦艇平臺火控系統基礎上,根據目標殺傷網高精度、低時延等快速響應需求,將多平臺感知資源、數據鏈、指揮控制資源、火力資源等高效組織運用,形成網鏈式、響應式動態協同控制模式,提升無人化、分布式、智能化目標打擊效能。而這些要素基于上述火力協同體系結構與傳統的火控系統融合在一起,火力協同系統的組成要素如圖3所示。
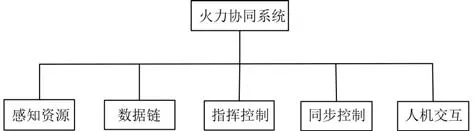
圖3 火力協同系統要素組成圖Fig.3 The composition diagrams of fire cooperation system
感知資源主要為無人平臺攜帶的各種用于探測目標的傳感器,無人平臺包括海上各型無人艇和無人機。
數據鏈是火力協同系統的實現保證,具有動態和無線自組織網絡特性。根據火力打擊時效性要求,需要高帶寬、高速率、低延遲的專用武器協同鏈、情報偵察鏈、指揮控制鏈,同時,針對反電子偵察、反電子干擾等要求,各類數據鏈應以定向波束、高頻率、低功耗通信設備為主。
指揮控制是火力協同系統的邏輯指揮中心,由平臺信息融合功能模塊、任務分配、決策等模塊組成。在戰斗編組中,每個平臺的邏輯指揮中心可形成相同的融合信息、統一的戰斗態勢圖。武器平臺將按照指揮控制中的“智能決策”輸出的火力分配結果對敵方目標進行協作打擊,同時,武器平臺作為“神經末梢”,將向“指揮控制”實時上報在平臺上探測并處理后的敵方目標等作戰信息,供邏輯指揮中心進行戰斗信息融合和戰斗任務決策。
同步控制是火力協同系統的核心組成部分,由多平臺協同管理與邏輯控制模塊和實施數據分發中間件組成。各平臺武器的同步控制模型相同,每一個平臺根據接收到的一致的協調控制指令,按對本平臺要求的指令,執行分配給本平臺的任務。
人機交互是火力協同系統的重要組成部分,無人平臺控制系統通過良好的人機交互接口為人員提供無人平臺的控制功能,并能夠實時監控無人平臺各種類型傳感器反饋信息(位置、速度、方位等),使得人員能夠及時裝完無人平臺的工作狀態,為人員順利完成任務提供支持。
4 火力協同的指揮控制機制和任務模式
4.1 指揮控制機制
協同指揮平臺對任務平臺的指揮控制采用OODA循環理論。在作戰過程中,作戰管理中心收集各無人作戰系統上報的戰場空間的觀察信息(O),進行態勢感知,形成戰場判斷(O),結合作戰任務進行指揮協調和任務分配決策(D),將分配的子任務下發到各無人作戰系統任務組執行(A),形成整個有人、有人帶無人、無人武器系統作戰分隊的大OODA循環。同時,各無人作戰系統按照子任務完成任務組的組建,在任務組中針對受領的子任務,進行局部戰場細化觀察(O)、戰場態勢判斷(O),進行臨機“局部決策”(D)與優化調整,將子任務智能分配為各平臺執行的元任務,控制各平臺協同執行(A),形成任務組內的小OODA。
4.2 協同任務模式
按照新一代裝備的特點,結合各平臺承載的能力,體系內各不同平臺相互之間組合主要分2類:有人平臺協同、無人平臺自主協同。
有人無人平臺協同火力控制模式主要解決利用無人平臺上的探測、火力資源,輔助有人平臺進行各項作戰任務的問題,通過有人平臺人工操控和網絡化火力資源控制,完成有人/無人平臺間的信息共享和火力協作運用。
無人平臺自主協同火力控制模式是一種遠期的作戰模式,主要解決利用多個無人平臺(空中/海面)上的探測、火力資源,通過自主協同決策和火力資源控制,完成多無人平臺間的探測信息共享、信息中繼、行動引導和火力協作運用等問題。表1為幾種典型協作任務模式,還可以不斷發展其他模式。
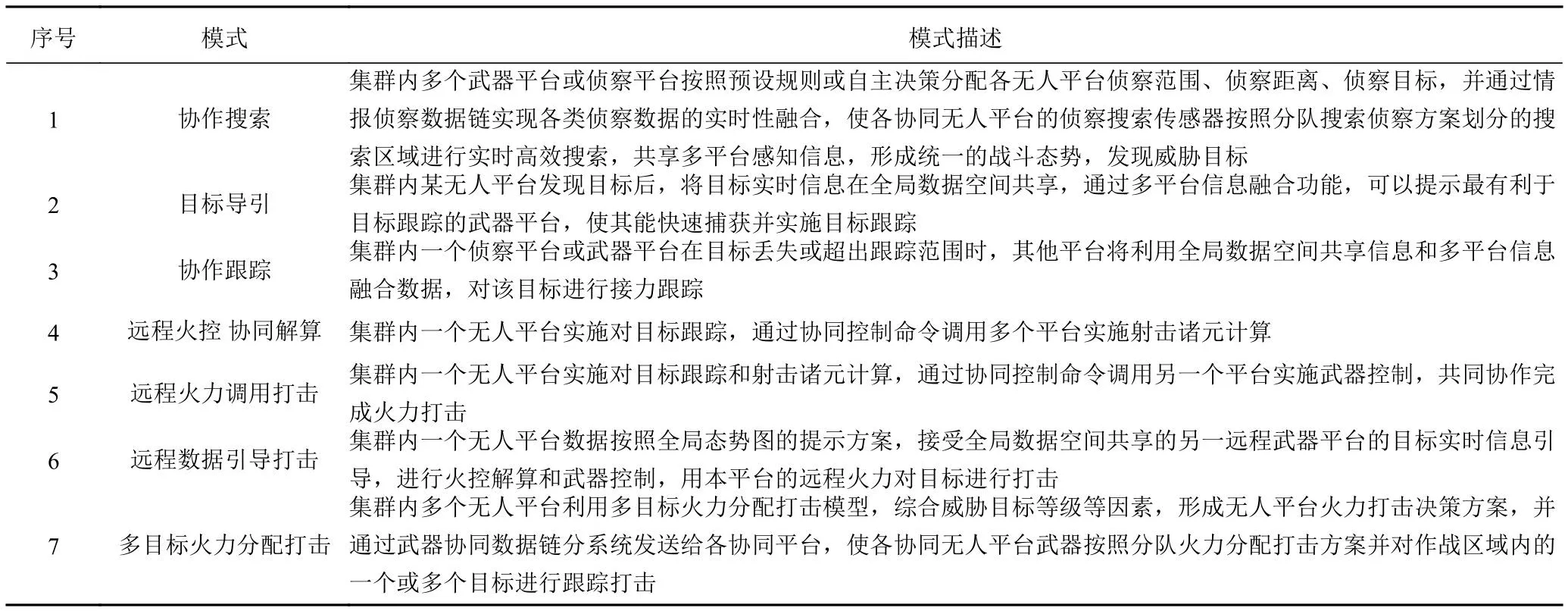
表1 典型協同任務模式Tab.1 The typical Cooperative Task-oriented Mode
5 火力協同關鍵技術
作為海戰場的主要力量,無人系統火力協同更依賴于網絡信息體系保障支撐,無人信息系統構建技術、無中心式自主規劃與協同任務優化技術、協同一致性控制技術等關鍵技術亟待攻關提高[9]。為了實現無人作戰系統的火力協同,必須實現各系統之間的信息和資源共享,故其網絡化資源的作戰管理與無中心的自主規劃與一致性控制尤其關鍵,其多變性和復雜性帶來了一系列必須解決的技術問題,如信息系統構建、無中心自主規劃、協同一致性控制等。
5.1 信息系統構建技術
海上無人系統行動因各類平臺能力特點的限制,易受到通信能力與條件、環境因素影響、無人平臺與其攜載載荷、不確定性感知環境、突發性兵力故障與戰損等方面因素制約。為了提高海上無人作戰系統在對抗條件下的生存力、靈活性與綜合作戰能力,需要研究與構建多種基于對抗條件的分布式智能信息處理架構,在此基礎上開展無人系統聯合作戰的兵力配置和使用時機、基于能力與環境變換的自適應角色分配、通信傳輸能力與兵力行動自適應匹配、基于無人蜂群多約束條件的自協同控制等技術研究,構建系統作戰應用模式與系統信息架構的關聯映射關系,形成無人系統跨平臺資源互操作能力,實現無人系統資源間遠程調用、復用與融合,提升無人集群多任務的支持和處理流程自適應優化。
5.2 無中心式自主規劃與協同任務優化技術
基于無人集群網絡自組織特性下無中心式信息處理與服務方法,構建面向群體智能與多智能體分布式自動規劃為理論的無人集群自主協同優化技術,形成復雜環境下無人系統無中心式協同規劃與智能控制技術,提升異構無人集群在復雜對抗環境下自適應協同感知、主動式任務加載、行為自主規劃與突發態勢下的快速重規劃能力。
5.3 協同一致性控制技術
除了滿足復雜戰場環境中的規劃實時性、避障能力、安全性指標和動力約束處理之外,還需要解決不同作戰單元之間同時抵達或者依次抵達目的地的時間協同問題、不同作戰單元從不同指定方位抵達目標的空間協同問題、不同作戰單元作戰載荷使用和信息協同等問題,滿足有人/無人系統在空間、時間、信息上的戰術協調一致關系,檢測和消解有人/無人系統航路之間可能存在的碰撞沖突,使有人/無人系統協同作戰效能最大化。
6 結 語
隨著人工智能技術和無人技術的發展,戰爭已逐漸出現無人化趨勢。美國國防部無人系統綜合路線圖(2017–2042)提出的遠景是“無人系統與有人系統無縫銜接,從而減少傷亡風險和壓縮作戰人員的決策過程”。本文基于這一需求,對無人作戰系統協同火控體系進行了初步研究,提出了多域無人集群火力打擊層次化指揮控制與多要素任務協同模式,對提升未來海上無人集群作戰能力和戰場生存能力提供技術支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
