深度神經網絡在船用齒輪箱故障診斷中的應用
2023-06-13 09:12:32顧欽平
艦船科學技術 2023年9期
顧欽平
(江蘇航運職業技術學院,江蘇 南通 226010)
0 引 言
齒輪箱是船舶傳動系統的重要組成部分,其工作環境惡劣,易受載荷、振動和沖擊等多種因素的影響,從而產生各類故障。故障診斷根據設備運行狀態和故障特征,采用合理的診斷策略,對設備進行狀態監測和故障診斷[1–3]。基于模型的故障診斷方法存在依賴專家知識和經驗、精度低等缺點,尤其在多類故障同時存在時,難以準確識別。深度學習是近年來才被提出的一種新型人工智能方法,其通過將圖像處理領域中的深度神經網絡(DNN)與深度置信網絡(DBN)相結合的方式來進行特征提取與分類。
1 深度神經網絡原理
DNN是一種具有自組織、自適應、自動學習能力的人工神經網絡。考慮到DNN在實際應用中具備多層前饋神經網絡,在計算上和傳統的線性層相比,能夠更加快速地收斂。深度學習模型在本質上是一個多層感知器,即神經元每一個輸出都包含了多個隱藏層的神經元的輸出。DNN模型可以根據輸入數據的不同來決定如何激活某個神經元,進而得到最終的輸出。因此,深度神經網絡可以通過不斷地調整隱藏層來優化網絡結構,最終使得模型獲得較高的準確度[4–5]。
深度神經網絡結構如圖1所示,深度神經網絡由多個隱藏層組成。隱藏層中包含輸入層、中間層和輸出層3個部分。輸入層通過特征提取模塊從輸入數據中提取特征并作為輸入參數輸入到中間層中,包含多個神經元,其中每個神經元都包含多個輸入參數,這些參數分別對應于不同的輸出特征。經過前一步得到的輸入數據和中間層維度共同構成了網絡模型的輸出。輸出層將所有這些輸出參數通過神經元連接起來,形成一個神經網絡結構。最后,在輸出層對新的數據進行預測,從而得到整個模型的分類結果。
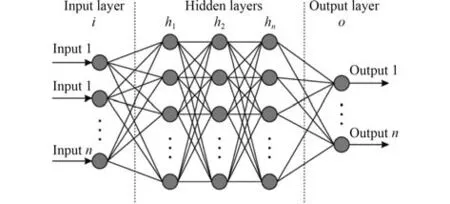
圖1 深度神經網絡結構Fig.1 Deep neural network structure
2 基于DNN的計算診斷方法
2.1 DNN計算方法
本文通過舉例說明邏輯回歸算法(LR)的思想,將其應用到DNN中,按照圖1所示的結構思路,對某個隱藏層的神經元進行放大,進而得到了圖2所示的DNN網絡結構
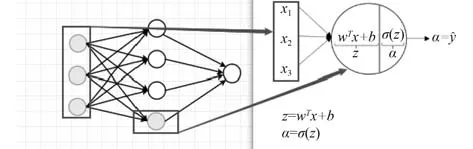
圖2 DNN網絡結構Fig.2 DNN network structure
輸入層的每一個樣本特征與隱藏層的特征方程線性擬合得到一個z值,得出以下激活函數:
基于以上函數,將z值映射到(0,1)之間的激活值α,得出邏輯回歸的基本迭代公式。
其中前向迭代的算法思想是,通過前面一層得到的激活值,計算下一層的Z值,再通過Z值計算激活值A。將樣本集如式(2)中樣本的每一個特征權重和特征值按列堆疊,可以得到式(3):
通過一些轉換,根據矩陣乘法的計算方式,AB矩陣相乘需要滿足A矩陣的列數要等于B矩陣的行數,所以得到下式:
其中,用W(1)的轉置矩陣為:
通過給Z(l)套上一個σ函數,由此計算最終的激活值。
2.2 DNN故障診斷模型計算流程
DNN是一種可以自動進行特征提取和分類的神經網絡模型,它將大量的特征提取操作轉移到了網絡中的底層,從而極大地降低了特征提取的復雜度。同時,由于其具有自動學習、非線性映射和并行計算等特性,在大數據處理方面具有其他算法所無法比擬的優勢。因此,DNN被廣泛應用于深度學習領域,主要包括分類、回歸、聚類和預測等功能。
DNN模型的初始化:A(l)=X隨機初始化一個服從正太分布Wl(=np.random.randn(0,1))但是不能為0,否則計算的結果都是0,沒有意義。b可以為0,有了初始化的值,就可以通過公式一步一步迭代得到最后一層的輸出結果,也就是需要的預測值A(1)。
在 DNN模型中,輸入的數據通過第一個隱含層傳遞到輸出層,經過前一層神經元得到的特征值作為該層的輸入。當網絡層數超過一定程度時,DNN將當前層數所得到的特征作為下一層輸入。
計算第1個隱層如下式:
基于上式發現,除了第1層的X是X,之后的都是用A(1)來替代。前一層的A(1)就是計算下一層的X,因為A的值是通過Sigmoid激活函數計算出來的,所以A(l)也叫激活值,用來激活下一層的計算。
計算第2個隱層(輸出層)得到下式:
將計算推廣到l層,在l-1層,可以得到下式:
在l層,可以得到下式:
由于DNN模型是一種非線性映射模型,因此對輸入數據進行特征提取時需要對其進行一定程度的降維處理,即將原始信號經過降噪、降維處理后得到的特征向量作為DNN模型輸出特征向量。
在DNN模型中,每個隱含層包含多個神經元節點,其中一個節點通常對應一個輸入層和一個隱含層,其余節點則對應多個輸入層和隱含層。通常來說,DNN模型具有2種激活函數:Sigmoid函數和ReLU函數。因此在進行特征提取時需要對2種激活函數進行選取。為了方便計算用交叉熵損失函數如下式:
由此可以得到代價函數如下式:
將上述函數獲得的結果寫成矩陣的形式:
其中:
3 故障診斷數據處理與結果分析
3.1 數據來源及預處理
對某船用齒輪箱進行故障診斷,測試信號為齒輪表面振動信號。由于采集到的故障信號含有噪聲,數據量較小,故采用小波包分解對原始數據進行處理。首先將原始信號通過小波包分解得到各個頻帶的分量,然后分別計算各個頻帶內各個分量的能量值,得到特征向量。該方法處理后的齒輪箱故障診斷數據如圖3所示。
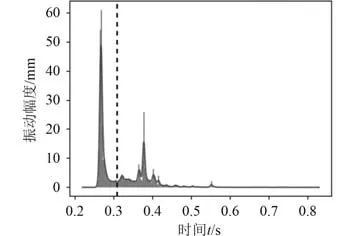
圖3 齒輪箱運行振動信號圖Fig.3 Vibration signal diagram of gearbox operation
將小波包分解后得到的各個頻帶內各個分量的能量值作為輸入特征向量,并借助SVM對其進行故障診斷。在進行SVM故障診斷時需要考慮輸入特征向量之間的相關性,然后對模型進行訓練。為了避免特征向量之間存在相關性和相關性對模型訓練造成不利影響,將故障特征向量進行標準化處理。
然后,根據Matlab軟件提供的標準化函數實現對原始數據進行標準化處理。將經過預處理后得到的特征向量作為輸入特征向量輸入至SVM模型中進行訓練與測試。為了保證模型訓練過程不受噪聲干擾,采用帶有閾值和歸一化處理的小波包分解方法對數據進行預處理。
3.2 實驗驗證
實驗裝置是一種能模擬齒輪裂紋、點蝕、斷齒、磨損、粘連及軸心錯位等多種典型失效形式的實驗裝置。在測試過程中,采用的壓電式加速度傳感器經由Matlab軟件進行PC端的數據分析。
首先,采用一個1 024點的窗口,與深度置信網絡(DBN)相結合,對收集到的振動信號進行傅里葉變換,得到一個1 750×1 024的診斷數據集,接著對各故障樣本展開進一步訓練,將最終剩余的25個樣本視為一個測試數據集。然后,結合頻率域信號的維數與故障的種類數目,將網絡的層次(含輸入層)設定為5個層次,節點數目是1 024-500-300-100-5,學習速率是01,最多可以進行100次的迭代。
最后,提出一種基于softmax神經網絡方法,輸出矩陣形式為:[1,0,0,0,0]表示正常狀態,[0,1,0,0,0]表示開裂故障,[0,0,1,0,0]代表斷裂齒的缺陷,[0,0,0,1,0]代表點蝕缺陷,[0,0,0,0,1]表示磨損故障。
為了更好地體現DBN在圖像中的應用,利用基于PC1,PC2和PC3的多維圖像進行降維,實現圖像的可視化。在此基礎上,使用DBN算法從一組故障數據中抽取一組故障特征,并給出一個可視化的結果,如圖4所示。
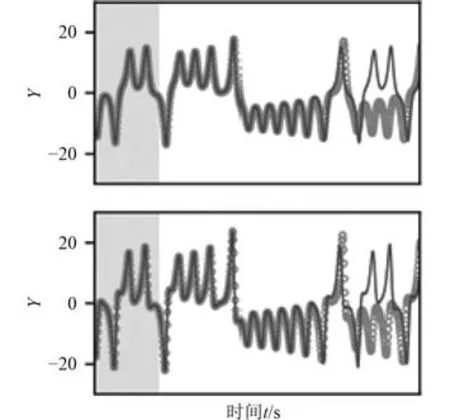
圖4 故障特征提取可視化Fig.4 Visualization of Fault Feature Extraction
從圖4可以看出,在凝聚狀態下,原始數據的故障特征并不是很好分辨,誤差始終在?20%~20%之間波動。特征值幅度曲線如圖5所示。利用DNN算法對故障特征值進行優化,利用隱層進行調整,得出如圖6所示的重構誤差變化曲線。
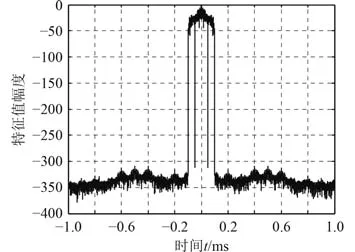
圖5 特征值幅度曲線Fig.5 Eigenvalue magnitude curve
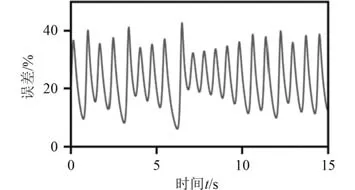
圖6 重構誤差變化曲線Fig.6 Reconstruction error variation curve
由圖6可知,經過DNN算法一段時間的修正后,深度神經網絡的重建精度穩定到20%~40%之間,在更多的數據更新后,重建誤差出現了快速的收斂性,表明了該算法的優越性。
綜上所述,經本次的最終實驗驗證后,得出深度神經網絡在齒輪傳動系統中的應用效果良好,對齒輪傳動系統中出現的各種故障有很好的判別能力,其判別效果與實際狀況一致,表明深度神經網絡在齒輪傳動系統中的應用是可行的。
4 結 語
本文針對船用齒輪箱的振動信號特征提取和故障診斷,提出基于深度神經網絡的故障診斷方法。采用基于模型的方法,先使用原始數據對模型進行訓練,然后再將經過訓練后的模型應用于新的數據,最后使用測試數據驗證了該方法的有效性。實驗結果表明,DNN在船用齒輪箱的相關故障診斷中,不僅精度高,而且收斂性好。主要結論如下:
1)雖然其收斂速度相對較慢,但對于具有一定數據量的系統,其收斂速度也能夠滿足使用要求。
2)由于船用齒輪箱振動信號特征復雜多變,本文通過大量實驗研究,確定了DNN模型中最佳參數和超參數。
3)為了進一步提高故障診斷效果,可以通過增加DNN模型的層數、提高 DNN模型的隱含層節點數以及減小DNN模型中殘差單元和隨機單元等方式來進一步提高DNN模型的診斷性能。
基于深度神經網絡的船用齒輪箱故障診斷方法具有一定的應用價值,今后將進一步研究模型優化、輸入信號處理方式等。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
電子制作(2019年15期)2019-08-27 01:12:00
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
