基于RBF神經網絡的艦載穩定平臺控制系統
2023-06-13 09:12:32俞竹青
艦船科學技術 2023年9期
關鍵詞:信號
鴉 婧,董 睿,俞竹青
(常州大學 機械與軌道交通學院,江蘇 常州 213164)
0 引 言
艦船在海上航行時,由于受到海浪等因素的影響,會發生橫搖、縱搖、首搖、橫蕩、縱蕩、垂蕩6個自由度的運動,這些非期望運動會對各種艦載設備的正常作業造成干擾[1]。艦載穩定平臺可以抵消這些搖擺運動,由于應用在海洋背景下,所以艦載穩定平臺控制系統是非線性和不確定性的,采用傳統PID控制無法滿足控制要求[2]。若能實現PID參數在線自整定,不僅能方便控制系統的調試,還可提高控制系統的自適應能力。由于RBF神經網絡可通過自學習自調整其權值和閾值找到最優的1組PID參數,從而逼近任意非線性函數,所以將RBF神經網絡與PID控制相結合對液壓驅動艦載穩定平臺進行控制研究。針對液壓系統突然啟動、停止、變速或換向時產生的液壓沖擊問題,提出采用正弦加速度導數連續原則設計穩定平臺理想速度曲線。
1 艦載穩定平臺控制系統設計
艦載穩定平臺主要由機械結構、執行機構、控制模塊和反饋元件組成。控制系統采用以絕對剩余距離為原則的速度控制方式,控制系統原理如圖1所示。該控制系統以STM32單片機為控制核心,當平臺發生傾斜時,慣性傳感器采集平臺俯仰和橫滾兩軸的角度,通過位姿反解求出使平臺穩定的活塞桿伸縮位移值,理想速度曲線根據活塞桿移動的剩余距離計算出相應的期望速度,期望速度與實時速度的偏差信號經過RBF神經網絡PID控制器,輸出PWM電壓信號,控制比例閥閥芯產生一定大小的開口,從而控制流入液壓缸工作腔的液壓油流量,使液壓缸按照理想速度伸縮指定位移,從而抵消船體的搖擺對上平臺的影響,通過運動補償使上平臺始終保持水平穩定。
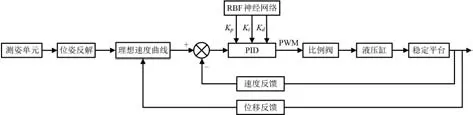
圖1 穩定平臺控制系統原理圖Fig.1 Schematic diagram of stable platform control system
1.1 位姿反解
已知上平臺在空間的位置和姿態,通過運動學逆解求出各伸縮桿的位移值,從而實現艦載穩定平臺上臺面始終保持水平。要抵消船體搖蕩運動的干擾,首先需要解決穩定平臺坐標系之間的相互轉換問題[3]。可將船體坐標系與慣性坐標系間的位置坐標變換描述為三次連續旋轉的歐拉角變換,則船體坐標系與慣性坐標系間的位置旋轉變換過程為:先繞Z軸旋轉角度ψ,再繞Y軸旋轉角度θ,最后繞X軸旋轉角度φ,可用如下旋轉矩陣表示,即
本文只研究橫搖和縱搖,所以繞Z軸旋轉的角度ψ=0?。艦載穩定平臺下平臺隨船體在做旋轉運動時還會產生平移運動,設平移位移量分別為xp,yp,zp,則位姿變換矩陣T定義為:
假設Ai(Aix,Aiy,Aiz)(i=1,2)為慣性坐標系中上平臺各鉸鏈中心點,為船體坐標系中下平臺各鉸鏈中心點。齊次變換矩陣為T,則下平臺中心點對應中的坐標Bi(Bix,Biy,Biz)(i=1,2)為:
可得各連桿的長度Li為:
各連桿的初始長度設為Li0,為隔離船體產生的搖蕩運動,各連桿應協調伸縮位移?Li,使上平臺相對慣性坐標系保持穩定,各連桿需要移動的位移為:
1.2 理想速度曲線設計
理想速度曲線的設計是實現速度控制的關鍵,液壓缸突然起動和停止會產生液壓沖擊,而造成液壓沖擊的主要原因是液壓缸的加速度存在突變,所以液壓缸的控制曲線要滿足以下基本條件:速度曲線連續;加速度曲線連續;加加速度曲線連續。由于正弦曲線加速度導數連續,所以采用正弦型曲線作為液壓缸的期望運行曲線,控制活塞桿在全行程任意點緩沖定位[4]。液壓缸的運動行程決定了液壓缸能否達到最大速度[5],所以控制曲線需要分成2種情況討論,如圖2所示。若液壓缸無法達到最大速度,則采用理想速度曲線1,若液壓缸能達到最大速度,則采用理想速度曲線2。其運動過程分為加速段、勻速直線段、減速段。
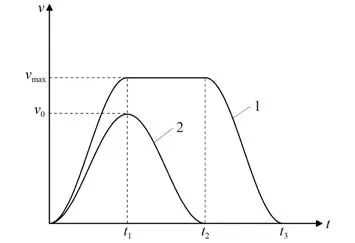
圖2 理想速度曲線Fig.2 Ideal speed curve
設計曲線時,假設加速段和減速段運行時間和運行距離均相等,則有t1=t3,l1=l3,勻速段運行時間t2=2t1,當液壓缸流量、液壓缸直徑、活塞桿直徑、緩沖距離確定時,緩沖時間則可確定。
1)加速段
2)勻速段
由于采用的是單活塞桿液壓缸,液壓缸伸出和縮回兩方向的推力和速度不相等,所以需要對液壓缸的伸出和縮回過程中的勻速段分別進行分析。該階段加速度為0,速度為v0,v0是液壓缸運行過程中所能達到的最大速度。
活塞桿伸出時勻速段速度為:
活塞桿縮回時勻速段速度為:
3)減速段
減速段初速度為v0,速度v的曲線方程為:
由于上述公式中含有大量三角函數和浮點數的運算,計算過程會花費大量時間,降低了系統的實時性[6],且理想速度曲線是連續的,所以需要將速度曲線離散化,通過表格的形式存儲在STM32的Flash中,以固定周期讀表獲取需要的速度指令。
2 RBF神經網絡PID控制器設計
RBF神經網絡可根據穩定平臺控制系統的性能要求和運行狀態,對權值進行修正,從而對PID參數進行實時調整[7]。本文使用RBF神經網絡對艦載穩定平臺位置控制系統進行在線辨識,根據得到的Jacobian信息對增量式PID參數進行在線整定。RBF神經網絡PID控制器原理如圖3所示,r(k)為活塞桿理想速度,y(k)為活塞桿實際速度,e(k)為活塞桿理想速度與實際速度的偏差,u(k)為PID控制器輸出的控制量,ym為RBF神經網絡的輸出。
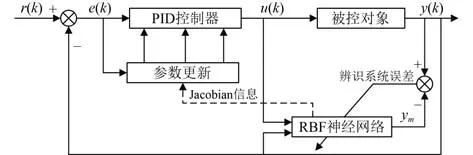
圖3 基于RBF系統辨識的自適應PID控制器原理圖Fig.3 Schematic diagram of an adaptive PID controller based on RBF system identification
2.1 增量式PID控制算法
采用增量式PID控制算法,公式為:
式中:kp,ki,kd為PID的3個調節參數;u(k)為第k次采樣時刻的控制量;e(k)為第k次采樣時刻期望輸出與實際輸出的差值。
2.2 RBF神經網絡控制算法
RBF神經網絡包含輸入層、單隱含層和輸出層[8],輸入到輸出的映射是非線性的,隱含層到輸出層的映射對可調參數而言是線性的,因此加快了學習速度且避免了局部極小的問題[9]。本文采用3-6-1的神經網絡結構,其結構如圖4所示。
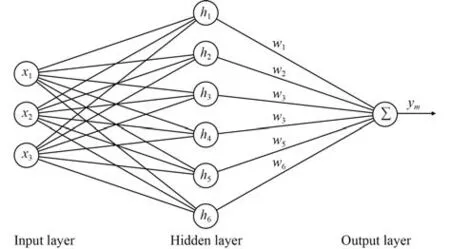
圖4 RBF神經網絡結構Fig.4 RBF neural network architecture
RBF神經網絡通過輸入層正向計算求解ym,繼而根據y與ym的差值,逆向更新網絡的輸出權值、基寬參數、節點中心。
1)前向傳播
X=[x1,x2,···,xn]T為網絡的輸入,分別為PID輸出控制量u(k)、系統當前實際輸出值y(k)、系統上一次實際輸出值y(k-1);H=[h1,h2,···,hm]T為隱含層的輸出;隱含層到輸出層的權值向量W=[ω1,ω2,···,ωm]T;隱含層的激活函數為:
其中Cj=[cj1,cj2,···,cji,···cjn]T為隱含層的第j個節點的中心矢量,bj為隱含層第j個節點的基寬度,基寬向量為:
辨識網絡的輸出為:
2)反向傳播
辨識器的性能指標函數為:
為使J最小,采用梯度下降法調整網絡的參數,η為學習速率,α為動量因子,各參數的迭代算法為:
由RBF網絡得到Jacobian信息,其算法為:
RBF神經網絡整定指標為:
通過梯度下降法調整kp,ki,kd;η1,η2,η3為PID調節參數的學習率:
3 艦載穩定平臺控制系統數學模型的建立
3.1 液壓缸的傳遞函數
選用油缸內徑D=80 mm,活塞桿直徑d=56 mm,行程L=200 mm(?100~100 mm)的液壓缸,液壓缸活塞桿的位移對指令輸入的傳遞函數為:
故液壓缸活塞桿的速度對指令輸入的傳遞函數為:
3.2 比例放大器的傳遞函數
選用VT-MRPA1-1-1X型比例放大器,可近似為比例環節[10],傳遞函數為:
式中:Ka為比例放大增益;I(s)為比例放大器輸出電流,U(s)為比例放大器的輸入電壓。
3.3 比例閥的傳遞函數
比例閥的輸入信號是電壓,輸出信號是流量,其傳遞函數由液壓動力元件的特性決定。采用4WRE1025-2X/G24K4/M型電液比例閥,其主要參數為:固有頻率440 rad/s,阻尼比0.7。根據電液比例閥的自身固有頻率與液壓動力元件的固有頻率的關系[11],可認為是二階環節,傳遞函數為:
式中:Ksv為閥的流量增益;ωsv為閥的固有頻率;ζsv為閥的阻尼比。
3.4 系統的傳遞函數
艦載穩定平臺控制系統的傳遞函數方框圖,如圖5所示。此處選取的是活塞桿做伸出運動時的傳遞函數。

圖5 系統傳遞函數框圖Fig.5 System transfer function block diagram
4 仿 真
在Simulink中搭建仿真實驗,由于選用的比例閥輸入指令信號范圍為?10~+10 V,需要加入飽和度模塊,上下限分別取+10和?10。分別對液壓缸階躍信號、正弦信號、理想速度曲線的響應進行仿真,并對常規PID控制和基于RBF辨識網絡的自適應PID控制的性能進行對比,系統模型的仿真框圖如圖6所示。
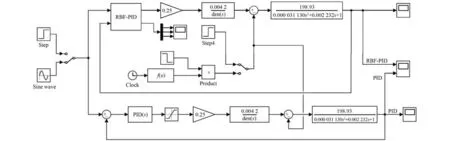
圖6 Simulink仿真圖Fig.6 Simulink simulation diagram
4.1 響應及調整性對比
采樣周期為0.001,RBF辨識器為3-6-1結構,其學習速率設為0.3,慣性因子設為0.05,PID參數的學習率設為0.2,仿真時間設為10 s,對RBF-PID控制器和常規PID控制器分別輸入一個幅值為0.025 m/s的階躍信號,并從5 s開始加入一個持續時間為0.05 s的干擾信號,階躍信號響應結果如圖7所示。2種控制方法的響應誤差如圖8所示。
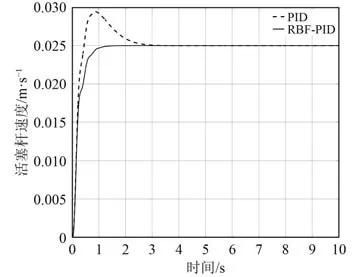
圖7 階躍信號響應圖Fig.7 Step signal response plot
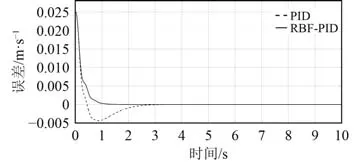
圖8 階躍信號響應誤差曲線圖Fig.8 Step signal response error plot
由圖7可知,PID控制的超調量為16%,RBFPID控制器的響應時間較PID控制快1.6 s,且基本沒有超調。在穩定狀態受到干擾時,RBF-PID控制器的調整時間較傳統PID控制器快1.2 s,回穩較快,且波動較小,因此與傳統PID相比,RBF-PID具有更強的適應性和魯棒性。在響應性能上,RBF-PID控制器優于常規PID控制器。
4.2 跟蹤性能對比
將上述非線性系統的輸入信號改為幅值為0.02 m/s,頻率為0.3 Hz的正弦信號,跟蹤結果如圖9所示,跟蹤誤差曲線如圖10所示。
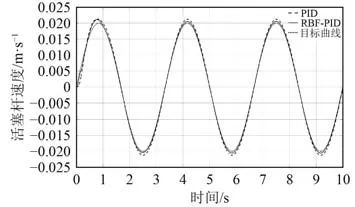
圖9 正弦信號跟蹤圖Fig.9 Sinusoidal signal tracking diagram
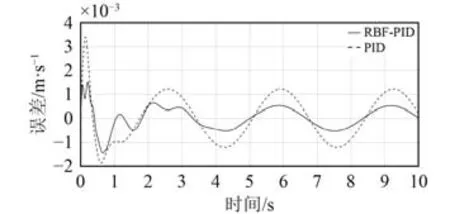
圖10 正弦信號跟蹤誤差圖Fig.10 Sinusoidal signal tracking error diagram
可知,在速度跟隨控制時存在滯后,但基于RBF辨識網絡的自適應PID控制器在調整速度、跟蹤精度時均優于傳統PID控制器,調整時超調較小,控制精度和效率也較好,且會持續接近跟蹤系統。
4.3 理想速度曲線仿真
q=24 L/min,由式(6)~式(9)計算活塞桿伸出0.12 m的理想速度曲線式(36),并在M文件中編寫理想速度曲線,理想速度響應曲線如圖11所示。
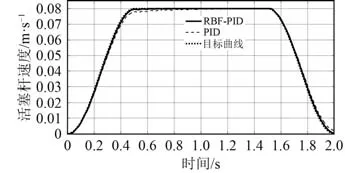
圖11 活塞桿伸出12 cm的理想速度曲線跟蹤圖Fig.11 Piston rod out 12 cm ideal velocity curve tracking diagram
采用RBF-PID控制的仿真曲線與目標速度曲線基本重合,且在啟動段和停止段基本沒有出現加速度突變,驗證了設計的理想速度曲線的可行性。圖12為對應的位移響應曲線。
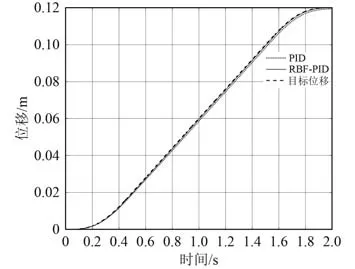
圖12 12cm位移響應圖Fig.12 12cm displacement response plot
5 結 語
本文對艦載穩定平臺的控制進行模型建立和仿真,并驗證了設計的理想速度曲線有效性。仿真結果表明,RBF-PID控制器在響應、調整性能、跟蹤性能方面均優于常規PID控制器,具有一定的自學習能力。采用RBF-PID控制算法可以在有效提高艦載穩定平臺控制精度的同時增強其抗干擾能力,達到了良好的控制效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
