基于視覺識別模塊的智農惠農大棚采摘助手設計
2023-06-26 13:11:54苑立娟韓秋諾
無線互聯科技 2023年8期
苑立娟 韓秋諾

摘要:新型的農業生產方式和技術促進了農業的發展和社會的進步,同時隨著計算機技術的普遍應用,越來越多的技術人員開始對智能化、機械化的農業生產工作進行研究,視覺識別、自動采摘更是成為重點研究方向。文章設計的智農惠農大棚采摘助手通過機械臂配合視覺識別模塊實現農作物的采摘,同時為了使農作物在成熟期得到更好的管理,該系統還配有環境檢測以及噴藥施肥功能。該系統適用于農業大棚機械化工作,可以提高工作效率,減少人工投入,實現農業生產智能化。
關鍵詞:智能采摘;環境檢測;自動施肥
中圖分類號:TN108.4 ?文獻標志碼:A
圖1 系統方案設計
0 引言
農業是一個國家的基礎,隨著科學技術的飛速發展,機器人已開始逐步應用于農業生產,特別是設施農業生產過程中,這標志著農業生產已開始向智能化和自動化方向發展[1]。在整個農業生產過程中,農作物成熟期的管理以及后續采摘環節至關重要。在傳統的農業生產勞動中,農作物成熟期的管理及采摘工作主要依靠自然條件和人力勞動,這已經不能滿足現代人們對農業生產的需求。基于此背景,本文將安卓技術與下位機結合,連接多種傳感器,設計了一款大棚采摘助手,它可以實現環境檢測以確保農作物最佳生長條件,實現施肥噴藥保證農作物更好生長,最后進行智能化采摘。
1 系統原理及方法
1.1 系統設計
本系統由安卓上位機、機械臂及下位機組成。下位機包括多種檢測控制模塊和無線通信模塊。其中有環境溫濕度傳感器、CO2傳感器和光敏傳感器,主要負責采集棚內的溫度、CO2濃度、光照強度信息。視覺識別模塊配合機械臂完成對農作物的識別定位以及采摘工作。通信部分采用ESP8266 WiFi模塊,僅需要通過串口使用AT指令控制,就能滿足大部分的網絡功能需求,致力于移動終端和物聯網技術應用,可將客戶設備接入WiFi網絡,與互聯網和局域網絡通信,完成連接網絡的作用。
本系統的工作原理為主控芯片外接各種傳感器模塊采集信息數據,利用WiFi遠程傳輸數據到移動端。在農作物的整個生長階段,用戶可以在移動端檢測大棚內的環境信息,也可以控制采摘助手進行噴藥施肥操作,以便于使農作物得到更好的管理培育。待農作物成熟后,控制采摘助手進行采摘工作。
1.2 系統功能
本系統通過下位機采集周圍環境信息,WiFi模塊進行通信,在安卓App上可以檢測到數據信息以及控制采摘助手進行采摘、噴藥施肥。
具體實現的功能如下:
(1)溫濕度傳感器、CO2傳感器、光敏傳感器分別采集大棚內的溫度、CO2濃度、光照信息。
(2)視覺識別模塊實現對農作物的識別及定位,配合機械臂完成采摘工作。
(3)WiFi通信模塊實現上位機與下位機之間的通信,在App手機上實現溫度、CO2濃度、光照信息的實時監測。
(4)手機App可以控制舵機轉動,使肥料從出口落下,實現自動施肥。
(5)采用無線遠程控制技術,對農作物進行自動噴灑農藥工作。
1.3 系統創新
(1)本系統突破了傳統的農作物管理培育方式和采摘方式,實現了智能化管理、機械化采摘,提高了采摘效率,減少了人工投入成本,滿足人們對農業生產的需求。
(2)本系統采用無線遠程控制技術實現對采摘助手的遠程控制,可以實時檢測環境數據,可以隨時隨地進行自動化采摘、施肥噴藥操作。
(3)傳感器采集到的數據實時傳遞到手機App,數據清晰明了。
(4)操作界面采用圖形化界面,功能強大且容易上手,方便高效。
2 系統硬件設計
2.1 信息采集設計
信息數據采集設計方案涉及的模塊主要包括溫度傳感器、光敏傳感器和CO2傳感器。DHT11溫濕度傳感器是一種帶有數字信號輸出校準的溫度傳感器。其溫度誤差在檢測溫度2℃左右,溫度測試范圍在-20℃~+60℃。它可以實現對棚內溫度信息的采集。本項目使用光敏傳感器實現對棚內光照強度信息的采集。它的工作原理為利用光敏元件將光信號轉換為電信號,包括紅外線波長和紫外線波長,它的敏感波長在可見光波長附近。該傳感器具有靈敏度高、驅動能力強等特點。CO2是植物進行生長的必需氣體,而一般大棚中CO2濃度過低,使用CO2傳感器可以檢測CO2含量,同時傳輸到手機App。
2.2 通信傳輸設計
通信傳輸設計部分選用ESP8266WiFi模塊,它自帶了完備的TCP/IP協議棧,用戶可根據該協議棧在原有設備中提升網絡功能,搭建單獨的網絡控制器。該模塊應用串口(LVTTL)與其他串行通信系統進行通信,還可以在串口和WiFi之間轉換。該模塊適用串口轉WiFi STA、串口轉AP、WiFi STA +WiFi AP方式,能夠快速搭建串口轉WiFi傳送數據方式。通過該模塊實現上下位機的通信,并且實現溫度、光照、CO2濃度的顯示以及能夠遠距離控制采摘助手。
WiFi接線:連接模塊的GND和VCC,CH_PD腳拉高,GPIO15(在沒有GIO15的系統中,可忽略此步)拉低,系統即可啟動,默認系統運行AT指令,接收客戶的指令。
2.3 自動控制設計
自動控制設計部分主要有兩部分:一是識別采摘;二是施肥噴藥。
2.3.1 識別采摘
識別采摘系統由機械臂和視覺識別模塊兩部分組成,視覺識別模塊通過Micropython語言對農作物進行定位和識別,當識別到農作物時配合機械臂完成采摘工作。
(1)機械臂。
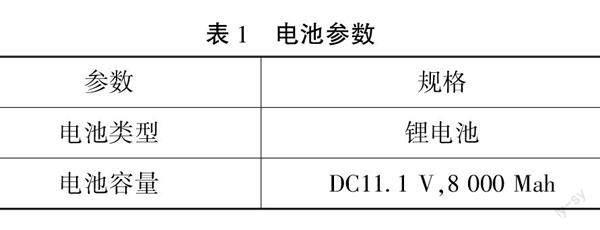
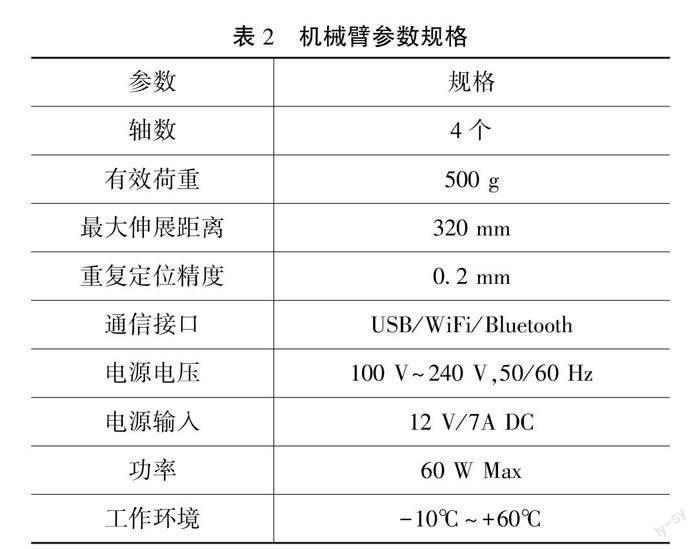
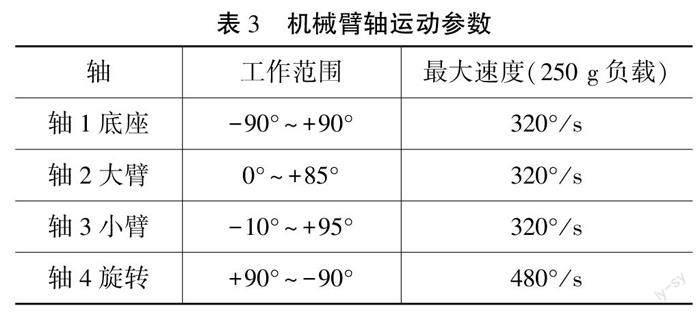
機械手臂重500 g,精密度為0.2 mm,采用3臺步進電機驅動,擁有兩個角度傳感器,下位機控制板選用arduino&FPGA。通過該協議,機械臂可以通過WiFi通信,完成對農作物采摘任務。
電池及機械臂參數如表1—3所示。
(2)視覺識別模塊。
開源的機器視覺框架(Open Machine Vision,Open MV)是一種開源、低成本、功能強大且體積小巧的視覺識別模塊,以STM32F767為核心處理器,集成OV7725攝像頭[2]。在非常小巧的硬件模塊上,利用C語言高效實現核心視覺算法,提供Python編程接口,使用者可以利用Python語言,使用Open MV提供的視覺功能。Open MV被安裝在采摘助手上,隨著采摘助手的移動,發現需要采摘的農作物時,Open MV會將數據通過串口發送給Arduino單片機,Arduino單片機執行編程好的動作組,控制機械臂采摘農作物并放置在托盤中[3]。
Open MV被定位于“帶機器視覺技術的安卓系統”,還可以操縱其他硬件配置、MCU模塊,例如Arduino,Raspberry Pi等。它還可以由別的MCU模塊操縱。通過這些特點,人們能夠很靈活地將它與其他流行的模塊相互配合,開發繁雜的產品功能。
Open MV上的機器視覺算法包括尋找色塊、人臉檢測、眼球跟蹤、邊緣檢測、標志跟蹤等。Open MV還可以用作非法侵入檢測與偽劣產品的挑選,跟蹤固定的標記物等[4],采用易于上手的Python編寫,降低了用戶的開發難度,可輕松地完成與各種機器視覺相關的任務[5]。
2.3.2 施肥噴藥
該系統通過ESP8266WiFi模塊發送信息控制噴藥、施肥,實現遠距離操作。通過手機App控制舵機的轉動,使得化肥從出口落下,進而實現自動施肥功能。
3 系統軟件設計
3.1 系統軟件開發環境
本項目的開發工具選用的是Arduino.exe。Arduino是一個便捷、靈便、實用的開源電子器件原型服務平臺。它包括硬件配置(各種類型Arduino板)和軟件(ArduinoIDE)。它內置在開源簡單的I/O插口版本,具備類似Java和C語言的處理方法和自然環境,包括兩個關鍵部分:一部分硬件配置為Arduino電路板,適合于線路連接;另一個是Arduino IDE,程序流程開發自然環境。只須在IDE里寫完編程代碼,把程序上傳至Arduino主板以后,便可執行操作。操作人員注意選擇相應的開發板和端口,加載相關機械臂控制的庫文件,上傳代碼時,需要將Arduino Mega2560通過連接電腦USB接口。
3.2 手機App設計
在開發安卓手機軟件的過程中,手機軟件開發者往往需要應用Java語言開展程序編寫和開發。在市場中,默認的Android移動App需要由Linux在其中全自動運行,假如在具體運行過程中需要取代Linux運行,往往會自動啟動程序流程。可是,假如代碼錯誤且不能正常運轉,手機 App應用程序將終止。根據安卓系統移動App自覺性的需求,務必不影響或毀壞別的App[6]。
3.3 移動終端配置
下載并打開手機App,設置IP地址和端口,點擊連接WiFi,可實現手機端對大棚內的溫度、CO2濃度和光照信息的實時監測,然后配置各個按鍵所發送的字符來控制機械臂進行采摘、噴藥和施肥。
3.4 機械臂和arduino通信配置
由于機械臂提供了相應的串口供用戶進行二次開發,所以可用Arduino mega2560控制機械臂。利用杜邦線分別將機械臂的RX、TX、GND與Arduino mega2560的TX、RX、GND接到一起。需要注意的是,由于串口3和串口2底層的庫函數里已經占用,所以在連線時,Arduino mega2560應該連串口0或者串口1。
4 結語
本文設計的智農惠農大棚采摘助手具有自動化采摘、施肥、噴灑農藥、棚內環境數據檢測的功能,對于農作物生長成熟階段的管理培育和后續采摘有很大的作用,可以廣泛應用于農業大棚、植物園等場所。但面對農業市場需求的日益變化,該智農惠農大棚采摘助手仍存在許多不足,比如筆者對農業市場的需求分析還不夠細致,本身對智能機器人的認識不夠,系統體系不健全、推廣能力不足等問題,需要不斷改善其功能以順應社會的快速發展[7]。本項目設計的大棚采摘助手系統十分可靠,且具有準確率高、穩定性好、操作簡單快捷、可維護性好等優點,同時加上國家對人工智能、物聯網等技術的支持,前景必然廣闊。
參考文獻
[1]項榮.開放環境中番茄的雙目立體視覺識別與定位[D].杭州:浙江大學,2013.
[2]同世雄,秦玉偉,肖康.基于視覺識別的乒乓球拾取機[J].電子設計工程,2022(13):146-150.
[3]崔志遠,曹文康,張志高,等.基于視覺識別的水面垃圾處理裝置[J].智能城市,2022(8):1-3.
[4]莊瓊云.基于OpenMV的智能尋跡小車設計與實現[J].黎明職業大學學報,2018(4):80-84.
[5]朱偉枝,楊亞萍,陳智.基于OpenMV的智能小車路徑規劃及定點擺放棋子的設計[J].機電工程技術,2020(7):126-128.
[6]秦蓉.基于Java語言的安卓軟件開發研究[J].電子技術與軟件工程,2021(5):44-45.
[7]金周英.關于我國智能機器人發展的幾點思考[J].機器人技術與應用,2001(4):5-7.
(編輯 王雪芬)
Design of picking assistant for intelligent agriculture and benefit agriculture greenhouse
based on visual recognition module
Yuan? Lijuan, Han? Qiunuo
(Baoding University, Baoding 071000, China)
Abstract: New agricultural production methods and technologies have promoted the development of agriculture and the progress of society. At the same time, with the widespread application of computer technology, more and more people begin to study intelligent and mechanized agricultural production. Visual recognition and automatic picking have become important research directions. In this paper, the picking assistant of intelligent agriculture and benefiting farmers greenhouse is designed to harvest crops through the mechanical arm and visual recognition module. At the same time, in order to better manage crops in the mature period, the system is also equipped with environmental detection and spraying fertilization functions. This system is applicable to the mechanization of agricultural greenhouses, which can improve work efficiency, reduce manual input, and realize intelligent agricultural production.
Key words: intelligent picking; environmental testing; automatic fertilization
