無人駕駛新能源汽車轉向制動避障控制策略設計及試驗*
2023-07-02 09:00:56劉存香劉學軍林土淦陳健健黃文光
小型內燃機與車輛技術 2023年2期
劉存香 劉學軍 林土淦 陳健健 黃文光
(1-江蘇大學汽車與交通工程學院 江蘇 鎮江 212013 2-廣西水利電力職業技術學院 3-廣西交通職業技術學院 4-南寧市第四職業技術學校 5-廣西機電工程學校)
引言
移動互聯網、大數據、云計算的蓬勃發展,推動交通運輸以信息化與智能化深度融合,使運輸服務更加富有個性化和人性化,使交通運輸的運行模式、管理方式,乃至社會治理模式都將產生巨大的變革。
未來交通的三個革命就是汽車的電動化、駕駛的自動化和出行方式的共享化。物聯網、車聯網等信息物聯網、車聯網的發展,使得信息繞過人類,成為一個獨立于物理空間、社會空間之外的信息空間,交通將進入三元空間時代,自動駕駛將很大程度促進智能車路系統應用,大幅度提高交通運輸服務的效率,服務的品質和管理的效能。車路協同-無人駕駛的應用,將降低交通事故發生率、緩解交通擁堵問題、降低駕駛員駕駛疲勞。
在國外,2019 年4 月,博世公司針對無人駕駛汽車開發了PEBS 系統,實現車輛處于無人駕駛狀態下緊急制動[1];韓國現代汽車表示,到2025 年,現代旗下所有車型都可搭載L2 和L3 級制動駕駛系統,以及可用于泊車的高級駕駛員輔助系統ADAS[2]。保時捷公司在2019 年12 月4 日表示,將對公司開發的無人駕駛車輛的召喚功能以及autopilot 功能進行測試,測試結果表明,車主可以借助這個功能在離車60 m 范圍內,通過手機APP 使汽車自動駕駛到司機面前。
在國內,陳丁等人提出了一種采用距離欺騙干擾的評估方法,結合一種波形編輯軟件,研制出了一種可產生含有虛假距離信息的欺騙干擾信號的試驗平臺[3]。吉林大學夏海鵬針對改進RRT 算法的無人駕駛車輛開展了路徑規劃方法的研究[4]。東南大學李曉凡針對全自動無人駕駛汽車人機界面概念開展了設計工作[5]。國內外無論從公司、研究院到高等學校都有研發工程師、研究員對無人駕駛的部分關鍵技術開展研究。國外公司通過安裝ACC、ADAS 等裝置部分實現了無人駕駛的功能,但距離L4 級無人駕駛汽車還有很大差距。而國內研究更多聚焦在仿真研究,或是結合地理信息系統進行路徑規劃工作。
無人駕駛新能源汽車從車身設計、策略設計等需要統籌考慮,只針對某一個技術開展研究將導致臺架試驗結果和道路試驗結果存在很大差異。為此,在設計無人駕駛新能源汽車整車的基礎上,研究控制策略是無人駕駛汽車推廣應用的關鍵。
1 UNEV 結構設計
圖1a 和圖1b 所示為設計的UNEV 結構圖,該車車身長2 200 mm,寬度1 100 mm,高度1 340 mm;輪胎前外徑350 mm,前內徑220 mm,后外徑350 mm,后內徑220 mm,軸距1 180 mm,前輪距740 mm,后輪距740 mm;離地間隙110 mm;車重100 kg;滿載質量200 kg;轉向方式為電動助力,轉向電機采用傳統齒條齒輪式結構;前后橋采用后輪驅動,前橋轉向結構;采用電磁制動方式,輪邊線圈為四組,每組線圈為400 匝;采用5 節12 V 鉛酸電池組,電池容量為20 Ah;采用激光雷達進行路面識別。UNEV 其余參數為:轉向電機額定電壓:12 V,最大輸出電流10 A,額定功率為100 W;控制器最大輸出電壓:60 V,最大輸出電流:85 A 功率:1 500 W;轉向驅動電機型號和參數:電壓:48V,電流:32A,功率:1500W;轉向控制器芯片采用STM32。
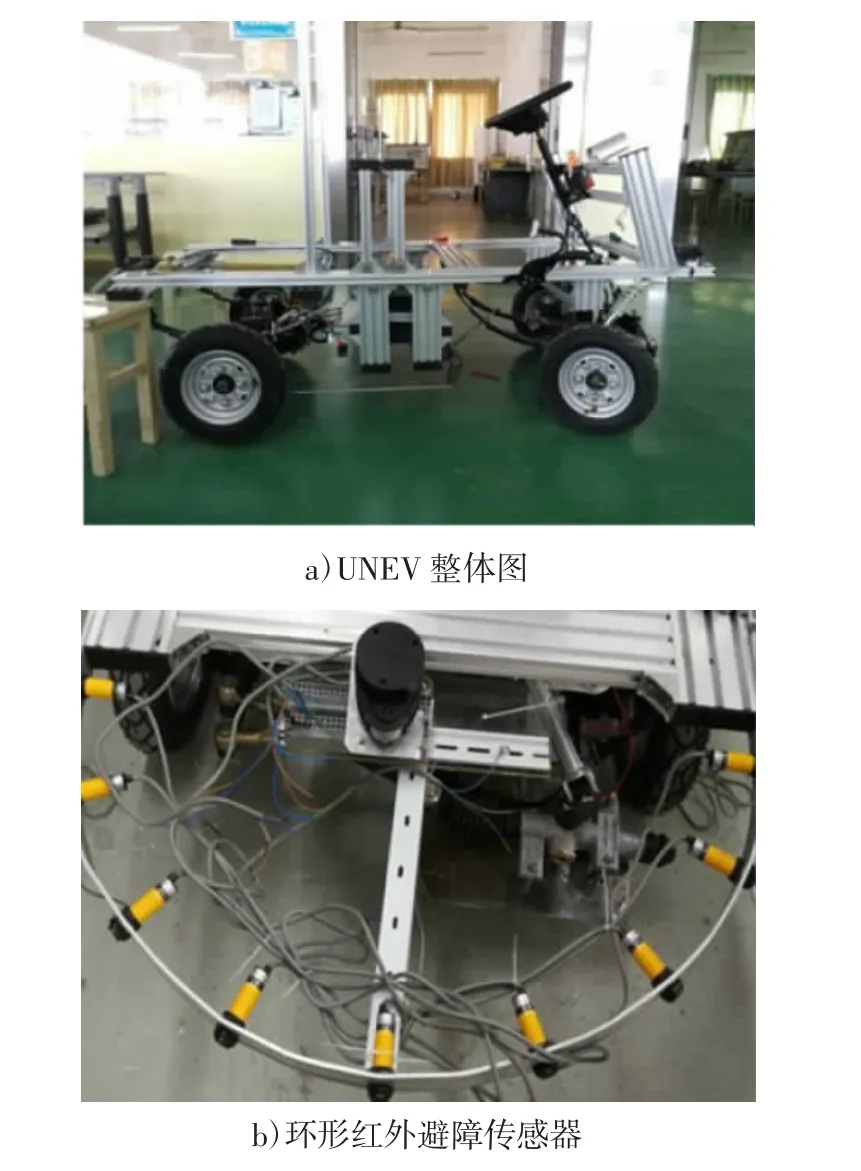
圖1 UNEV
圖2 所示為UNEV 控制系統原理圖,由控制器模塊、信號模塊及執行器等組成。控制器模塊ECU由32 位處理器STM32、信號調理電路、脈寬調節電路、信號調理電路組成;激光雷達信號、車速信號、輪速信號以及節氣門位置信號等經信號調理電路輸入處理器,處理器根據各路信號計算出與前方障礙物距離、當前汽車行駛車速等關鍵參數,根據相應控制策略做出判斷后,輸出控制信號,并經脈寬調節電路控制電磁制動器線圈以及方向盤舵機等執行器工作。
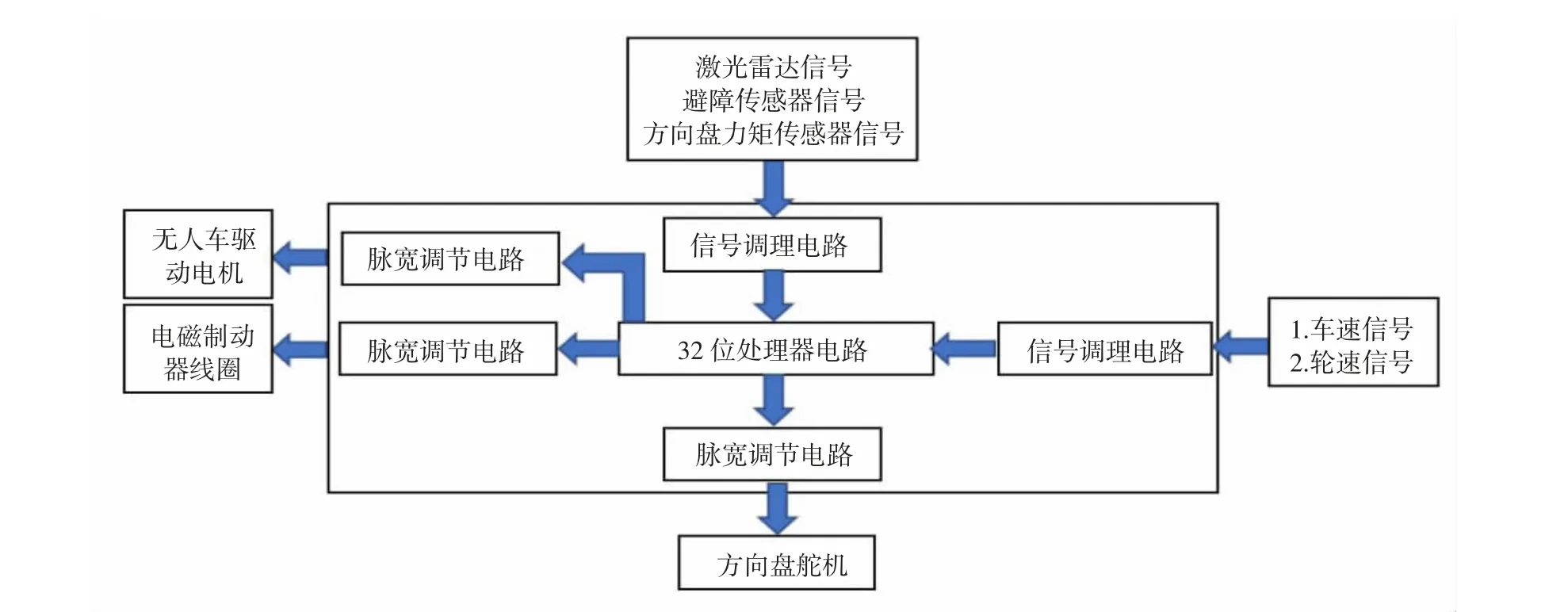
圖2 UNEV 控制系統原理圖
行駛過程中,UNEV 有兩種控制模式,即:駕駛員控制模式和無人駕駛模式。
當駕駛員將手置于方向盤時,手動旋轉方向盤的力矩將反饋到方向盤力矩傳感器中,力矩傳感器識別到當前狀態為駕駛員控制模式,并將信號反饋給控制器模塊,UNEV 將不對執行器進行控制。
當駕駛員手不放置在方向盤上時,方向盤力矩傳感器沒有監測到轉向助力,將識別當前狀態為無人駕駛模式,并將信號反饋給控制器模塊,UNEV 處于無人駕駛狀態。此時,控制器模塊將不斷監測紅外避障傳感器信號、方向盤力矩傳感器信號、激光雷達信號等,并根據控制策略對車輛行駛速度、轉向角度、電磁線圈等進行控制。
2 控制策略設計
駕駛員在轉向避障時通常伴有制動操作行為,這將會影響轉向避障的效果,即使車輛在避障過程中。然而,在無人駕駛汽車中,通過協調利用制動和轉向可以使前后車撞擊的距離最小化。為此,本試驗所采用的控制方法遵循Biral 等人提出的“最大方向盤轉速最小”原則,并確保駕駛過程沖擊感最小。
UNEV 處于無人駕駛模式時,根據多傳感器信息融合,判斷車輛能夠穩定到達且不會發生碰撞縱向距離(處于可行距離)時,則制動系統做單一避障控制;若前后車安全距離裕量雖不會導致車輛碰撞,但存在著高風險性時,則進行單一轉向避撞控制;若前后車發生事故的可能性非常高(處于危險距離),則需要通過對電磁制動器線圈通電電流和方向盤舵機通電電流同時控制,以確保車輛行駛軌跡與預期軌跡一致。
例如,正常行駛時,紅外避障傳感器在車輛前方安全距離內未監測到任何障礙物時,UNEV 以30 km/h時速運輸行駛。整車驅動電機將輸出大電流,驅動車輛直線行駛。
當紅外避障傳感器在UNEV 前方安全距離內監測到障礙物時,避撞方式將存在:單一制動避撞、單一轉向避撞以及轉向及制動同時避撞等三種方式,不同的避撞方式根據UNEV 與前方障礙物或前方車輛的縱向距離進行選擇。在開發制動駕駛緊急避撞控制策略時,需要對制動和轉向所需要的最短縱向距離進行準確的定量分析,以確定在不同工況下哪種避撞方式可行。
且L≥HS,
則Iw=0;Ib=0
式中:△t 為檢測時間,s;vi為i 時刻汽車速度,m/s;L為與前車距離,m;HS為安全距離,m;Iw為方向盤舵機通電電流,A;Ib為電磁制動器線圈通電電流,A;
且L≥HS,
則Iw=0;Ib=0;i=i+1
則Iw=0;Ib=Iaφ1;i=i+1
式中:Ia為電磁制動器線圈最大通電電流,A ;φ1為當前時刻輸出電壓占空比
汽車緩慢制動,但仍沿當前方向行駛。
則Iw=0;Ib=Iaφ2;i=i+1
式中:φ2為當前時刻輸出電壓占空比
汽車進一步制動,但仍沿當前方向行駛。
則Iw=Iw1;Ib=0;i=i+1
此時,UNEV 放棄對制動的控制,轉為加速變道超車,此時汽車總的轉向角度將由兩部分構成,一個是根據避撞路徑規劃得到的前饋轉向角輸入αFF[6],另一個是根據UNEV 側向位置Y 和航向角φ 兩個參量計算得到的總反饋輸入角αFB。
考慮到UNEV 橫擺角速度的二次積分會引起角度輸入較大誤差的出現,為此測量時不引入積分控制。
式中:KPY、KIY、KDY分別為PID 控制器的比例增益、積分增益和微分增益參數。KPφ、KDφ分別是PD 控制器的比例增益和微分增益。
3 道路試驗及結果分析
針對所設計的UNEV 進行道路試驗,試驗道路為雙向單車道道路,測試規范參考工業和信息化部、公安部、交通運輸部等三部制定的《智能網聯汽車道路測試管理規范(試行)》,測試項目包括:前方車輛(含對向車輛)行駛狀態的識別及響應、障礙物的識別及響應、跟車行駛(包括停車和起步)、超車以及人工操作接管等[7-8]。
行駛過程中,利用USB3106 隨車數據采集卡采集橫擺率傳感器信號及電磁制動器線圈通電電流大小,利用攝像機記錄UNEV 與前車距離。通過程序設置安全距離Hs為10 m,汽車勻速行駛車速為3 m/s。
圖3a~圖3d 所示為UNEV 避開前方車輛行駛軌跡圖,前方車輛保持靜止狀態。表1 所示為試驗過程中各參數值。
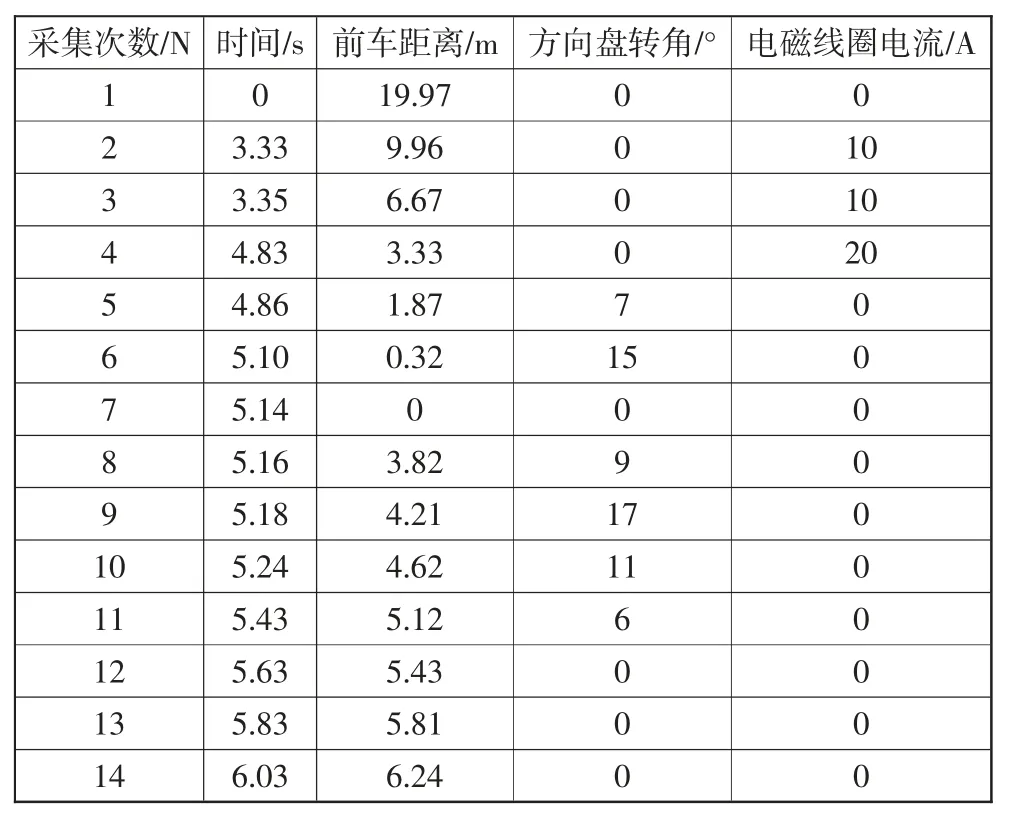
表1 試驗過程中不同時間下的各參數值

圖3 UNEV 壁障過程
圖4 為UNEV 與前車距離、方向盤轉動角度隨時間變化曲線圖。圖5 為電磁制動器線圈通電電流隨行駛時間變化曲線圖。圖中橫坐標為UNEV 行駛時間t,主縱坐標為UNEV 與前方車輛距離L,次縱坐標為方向盤轉過角度δ。在UNEV 與前方車輛距離超過10 m 時,UNEV 保持勻速行駛狀態。當兩車距離小于10 m 時,此時電磁制動器線圈通電電流為10 A,UNEV 減速。兩車距離進一步減小至6.6 m 時,電磁制動器線圈通電電流增大至20 A,車速進一步降低;行駛時間到達5.15 s 時,兩車距離減小至3.3m時,車速迅速提升,電磁制動器線圈不通電,此時方向盤快速轉動至15°,UNEV 變道超越前車,兩車間的縱向距離進一步縮短。5.22 s 時,UNEV 與前車平行行駛,方向盤轉角為0°。在5.35 s 時,UNEV 完全超越。6.1 s 時,UNEV 方向盤轉向角度為0°,UNEV完成超越。
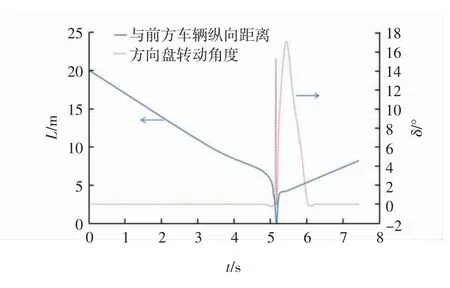
圖4 UNEV 與前車距離、方向盤轉動角度隨時間變化曲線圖
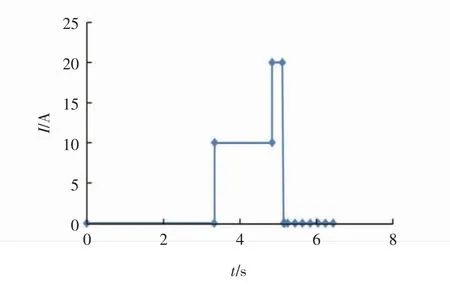
圖5 電磁制動器線圈通電電流隨行駛時間變化曲線圖
4 結論
針對UNEV 設計及整車控制策略設計等問題,本文進行了車體設計及控制電路分析,將避撞方式分為了單一制動避撞、單一轉向避撞以及轉向及制動同時避撞等三種方式,并逐一進行了策略設計。設計完成的UNEV 進行了道路試驗,并得出以下結論:
1)采用電磁制動器控制車輛制動、采用方向盤電機控制方向盤轉動等方式,結合所設計的三種避撞模式能提升無人駕駛車輛繞開障礙物行駛的穩定性和可靠性,且降低了因復雜程序導致的車體控制過程出現抖動及轉向卡死等問題。
2)采用32 位處理器STM32 能有效提升UNEV的識別及響應速度。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車與安全(2019年9期)2019-11-22 09:48:03
中國生殖健康(2019年3期)2019-02-01 06:12:26
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
決策探索(2014年21期)2014-11-25 12:29:50
環球時報(2010-02-11)2010-02-11 13:34:15