基于改進型LADRC的光伏逆變器母線電壓控制
2023-07-07 03:10:06周雪松王佳垚馬幼捷
計算機應用與軟件 2023年6期
周雪松 王佳垚 馬幼捷
(天津理工大學電氣電子工程學院 天津 300384)
0 引 言
太陽能是最具發展前景的可再生能源,解決了傳統化石能源引發的一系列環境問題。光伏發電技術受到全世界的研究和關注[1-3]。光伏并網逆變器是實現直流-交流轉換的重要電力電子變換器,是光伏發電系統中前級DC/DC變換器和電網之間的接口裝置,在光伏并網發電中起到了關鍵性作用。逆變器具有非線性、強耦合等特點。光伏并網逆變器良好的控制效果可以保證并網順利地完成。因此,光伏逆變器的控制效果引起了國內外學者的關注和研究[4-6]。目前雙閉環PI控制仍然是使用最多的逆變器控制方式,但在系統受到擾動時,其控制效果和精度往往不能滿足需求。文獻[7]采用傳統PI控制方式對逆變器進行控制,但是如果想要使系統穩定需要增大PI控制器的增益,且控制效果不盡如人意。文獻[8]采用了無差拍控制策略,在此控制策略下,瞬時擾動可以消除,但是不可以對周期性擾動進行完全抑制。文獻[9]采用的方法是增加控制器的數量,這會使系統變得非常復雜。文獻[10]采用重復控制,但是這種控制方式會讓其在過渡過程中始終存在一個基波周期延遲。
自抗擾控制技術首先由韓京清[11]提出,自抗擾控制器是在傳統PID控制基礎上,結合現代控制理論知識所提出的更適合實際系統的控制策略。由于自抗擾控制器(ADRC)參數較多,調節起來較為困難,在此基礎上高志強博士通過將ADRC線性化,提出了線性自抗擾控制器(LADRC),將可調參數進行簡化,線性自抗擾控制器更加適用于實際工程。但是其控制性能由于參數的簡化也會得到降低。
為了提高自抗擾控制器的控制性能,本文提出一種基于新型LADRC的光伏并網逆變器控制策略。這種新型線性自抗擾控制器在傳統自抗擾控制器中引入校正環節,并將此控制器用于電壓外環進行控制。此改進方法可以使得高頻衰減能力增強,直流母線電壓可以更穩定,抗干擾能力增強。多工況下的仿真驗證了改進型LADRC的有效性,其具備更好的動態性能和抗干擾能力。
1 光伏并網逆變器建模及傳統LADRC設計
1.1 光伏并網逆變器建模
圖1為光伏并網逆變器結構,其中:L為等效濾波電感;R為濾波電感等效串聯電阻;C為母線濾波電容。
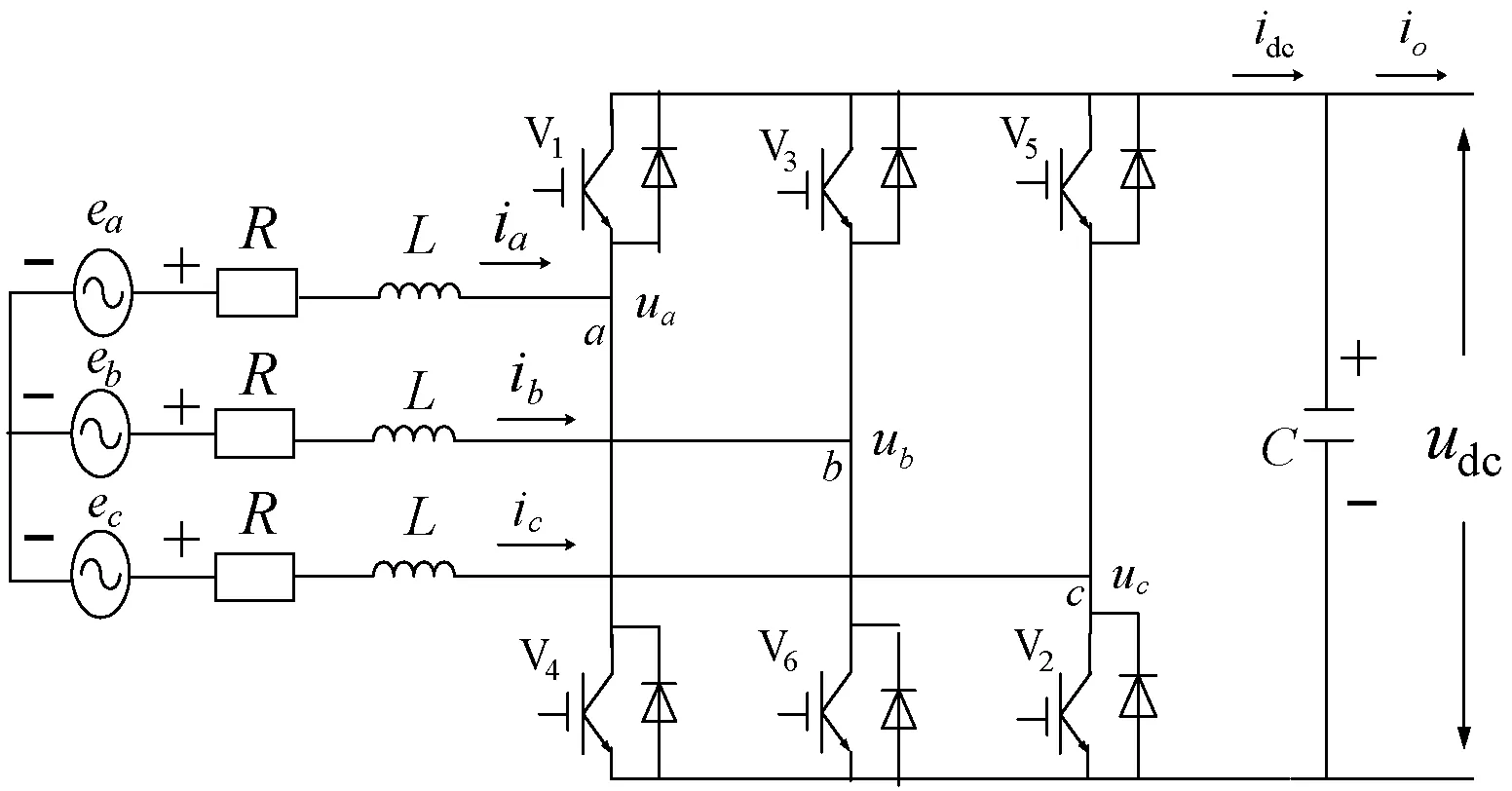
圖1 光伏并網逆變器拓撲結構
根據圖1和基爾霍夫定律,可以得到:
(1)
式中:ia、ib、ic為三相電網電流;ea、eb、ec為三相電網電壓;ua、ub、uc為電網側逆變器輸出相電壓。
在三相靜止坐標系下網側逆變器數學模型可以得到:
(2)
式中:udc為直流母線電壓。經過如下變換,可將三相靜止坐標系下的模型變換到d、q兩相旋轉坐標系下的數學模型:
(3)
(4)
經過式(3)、式(4)變換,可以得到網側逆變器在d、q旋轉坐標系下的數學模型:
(5)
式中:ed、eq為在dq旋轉坐標系下電網電壓分量;id、iq分別為d軸、q軸電流分量;ud、uq分別為逆變器輸出電壓在旋轉坐標d軸、q軸上的分量;sd、sq為在dq旋轉坐標系下開關函數的分量;ω為電角速度。
經過式(5)變換可得:
(6)
由式(6)可得,光伏并網逆變器可以等效為二階系統,由此可以設計二階自抗擾控制器。
1.2 傳統二階LADRC設計
線性自抗擾控制器(LADRC)由線性擴張狀態觀測器(LESO)、線性跟蹤微分器(LTD)和線性狀態誤差反饋率(LSEF)構成。其中LESO是LADRC的核心,可以解決主動抗擾技術中擾動觀測這一核心問題。將系統總合擾動擴張為一全新狀態變量,對系統狀態變量和總合擾動進行觀測。LTD可以安排過渡過程,很好地解決了系統快速性和超調之間的矛盾。傳統LADRC控制框如圖2所示。其中:r為給定直流母線電壓參考值;b0為控制增益;u為控制量;z1、z2、z3為各狀態變量及總擾動的觀測值;y為系統的輸出。

圖2 傳統LADRC結構
LADRC不依賴于具體的系統模型,通過擾動補償環節可以將被控對象變為積分串聯型,便于控制。下面將以二階系統為例介紹二階LADC,設二階被控對象為:
(7)
式中:y、u、ω分別為輸出、輸入和擾動。a1、a0、ω均未知。b部分已知(已知部分為b0)。則式(7)可以改寫為:
(8)

(9)
對應的三階LESO為:
(10)
由極點配置原理,將特征方程極點配置在同一位置(-ωo、ωo為觀測器帶寬)。
由λ(s)=|sI-(A-LC)|=(s+ωo)3=s3+l1s2+l2s+l3可得:
(11)
線性狀態誤差反饋率為:
u0=kp(r-z1)-kdz2
(12)
擾動補償環節為:
(13)
(14)
由式(14)可知,被控對象被等效為積分串聯型。
(15)
通過以上理論分析,LADRC可簡化為控制器帶寬ωc、觀測器帶寬ωo和b0三個可以調節的參數。
2 改進型二階LADRC設計
2.1 傳統三階LESO研究分析
LESO是LADRC的核心,LADRC的控制性能受到LESO對擾動估計能力的影響,它可以對系統總和擾動進行觀測并給予補償,將被控對象變為積分器串聯型,便于控制。下面將在傳統LESO基礎上,根據被控對象的特征,設計改進型LESO。
根據式(10),可以求得z1、z2、z3的傳遞函數為:
(16)
根據式(9)有:
(17)
根據式(16)和式(17)可得:
(18)
由式(18)可知,φ(s)是一個三階系統,它的頻率特性如圖3所示。在時域上與典型的二階系統類似,存在快速性與超調的矛盾;在頻域上存在嚴重的相位滯后和幅值衰減。以上分析的這些特點使得傳統LESO的擾動觀測性能并不理想。

圖3 改變觀測器帶寬
2.2 改進型三階LESO研究分析
從圖3可以看出,增加觀測器帶寬ωo可以明顯改善LESO擾動觀測能力,然而由于觀測噪聲和其他因素的影響,這樣的方法改善LESO的性能是有限的。為了增加LESO觀測帶寬,同時要避免減少高頻噪聲的抑制能力,φ(s)參照串聯校正的方法進行改造,可以得到:
(19)
式中:Tc為超前時間常數;α為系數。
如圖4所示,傳遞函數幅頻特性曲線顯示了傳統LESO與改進型LESO的擾動估計能力。可以看出,在保持觀測器帶寬不變的前提下,改進型LESO可以明顯提高擾動觀測能力,同時高頻衰減能力相較于傳統LESO明顯增強。

圖4 改進型LESO與傳統LESO擾動估計能力比較
由式(10)和式(19)可得改進型LESO狀態空間為:
(20)
2.3 改進型LESO抗擾性能分析
由式(12)、式(13)和式(20)可以獲得傳遞函數為:
(21)
式中:
l1)s2+(αTcl3+l2+Tcl3)s+l3]
[l3+kdl2+kpl1+kdTcl3+αTc(l3+Tckpl3+
kdl3+kpl2)]s2+(kdl3+kpl2+kpTcl3+
kpαTcl3)s+kpl3
N(s)=αTcs4+[(1+αTc(kd+l1)]s3+[kd+l1+
αTc(Tcl3+kp+l2+kdl1)]s2+(kp+l2+
kdl1+αTcl3)s
根據式(9),被控對象可以記為:
(22)
由式(21)、式(22)可以將系統的結構簡化為如圖5所示結構。

圖5 LADRC簡化結構
根據圖5,系統的閉環傳遞函數可以得到:
(23)
根據圖5與式(23)可知,當不計擾動項影響時,對控制器帶寬ωc進行調節,可以解決快速性與超調之間的矛盾,即實現系統快速無超調地對輸入的跟蹤。圖6為傳統LADRC與改進型LADRC的擾動傳遞函數bode圖,Tc=0時為傳統LADRC,當Tc不斷地增加,LADRC的抗擾性能明顯提高。

圖6 改進型LADRC抗擾性能分析
3 仿真實驗
為了驗證本文所提改進型雙閉環控制策略的有效性,在MATLAB/Simulink仿真平臺上搭建光伏并網系統仿真模型,本文光伏并網逆變器的控制策略為基于改進型自抗擾控制器的電壓外環控制和PI電流內環雙閉環控制策略。光伏系統參數和ADRC控制器參數見表1和表2。

表1 仿真系統參數

表2 控制器參數
圖7為光照強度突變下傳統ADRC和改進型ADRC控制效果對比,令直流母線電壓Udc初始值為500 V,由圖7(a)可見,0.7 s時光照強度由1 000 W/m2階躍變化至900 W/m2,在1 s時又有900 W/m2變為1 000 W/m2,通過超調和調整時間性能指標對改進LADRC和傳統LADRC的控制效果進行比較和分析。由圖7(b)可知,傳統LADRC的超調為2.4%,而改進型LADRC的超調為1.4%。傳統LADRC的調整時間為0.1 s,而改進型LADRC調整時間為0.05 s。對于圖7(c),傳統LADRC超調為3.6%,而改進型LADRC超調為2.4%。傳統LADRC調整時間為0.1 s,改進型LADRC經過0.05 s后趨于穩定。在光照強度兩次突變過程中,改進型ADRC受光照強度突變影響較小,達到穩態時間更短,直流母線電壓波動范圍更小,具有更好的抗擾性能。

圖7 光照強度突變下控制效果對比
圖8為光伏電池溫度突變狀況下改進ADRC和傳統ADRC控制效果對比,在1.5 s時刻溫度由25 ℃突變至30 ℃。可以看出,傳統LADRC的超調為3.8%,改進型LADRC超調為3.4%;傳統LADRC調整時間為0.06 s,改進型LADRC調整時間為0.03 s。改進型LADRC可以更好地穩定直流母線電壓,調節時間更短,具有更好的抗干擾能力。

圖8 溫度突變下控制效果對比
圖9為電網加載、減載(20 MW)工況下,改進型ADRC與傳統ADRC控制效果對比。由圖9(a)可知,傳統LADRC超調為2.2%,改進型LADRC超調為1.6%。傳統LADRC調整時間為0.1 s,改進型LADRC經過0.03 s后趨于穩定。對于圖9(b),傳統LADRC超調為2.4%,而改進型LADRC超調為2%。傳統LADRC調整時間為0.1 s,而改進型LADRC調整時間為0.03 s。改進型ADRC調節時間更短,可以更快達到穩態,電壓波動范圍更小,具備更好的動態性能和抗干擾能力。

圖9 電網加載、減載工況下控制效果對比
4 結 語
本文以光伏并網逆變器為被控對象,設計一種新型二階自抗擾控制器。采用雙閉環控制策略,為了提高傳統LESO的擾動觀測能力,在傳統LADRC基礎上引入校正環節,有效解決快速性與超調之間的矛盾。改進型LADRC的高頻衰減能力明顯提高,通過頻域分析法分析改進型LADRC的抗擾性能。最后通過搭建光伏系統仿真模型,在多工況下對不同控制策略的控制效果進行仿真對比,通過多工況下的仿真驗證了本文所提改進型LADRC控制策略的正確性和可行性。改進型LADRC可以更好地穩定直流母線電壓,抗干擾能力更強。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
