GNSS多系統RTK授時性能分析
2023-07-08 07:54:08劉嘉偉孫保琪袁海波楊旭海
導航定位與授時 2023年3期
關鍵詞:系統
劉嘉偉,孫保琪,韓 蕊,張 喆,王 侃,袁海波,楊旭海
(1.中國科學院國家授時中心,西安 710600; 2.中國科學院精密導航定位與定時技術重點實驗室,西安 710600; 3.山東理工大學建筑工程學院,山東 淄博 255049; 4.中國科學院大學,北京 100049)
0 引言
時間是7個基本物理量之一,也是目前測量精度最高的物理量。高精度時間傳遞在國防建設和經濟社會的運行中起著基礎性的支撐作用,是現代社會正常運行的基本保障之一[1-3]。目前光纖雙向授時手段時間傳遞不確定度可達100 ps量級[3],但其設備成本和技術要求較高,并且受到光纜覆蓋范圍的限制。隨著全球導航衛星系統(global navigation satellite system,GNSS)的發展與完善,衛星授時的精度目前可達ns量級,因其具有全球覆蓋、全天候、全天時、低成本、高精度等特點,也成為應用最廣泛的授時手段之一。隨著科學技術和社會經濟的不斷發展,5G移動通信、物聯網等領域對衛星授時提出了更高精度、更低成本的需求[4]。
精密單點定位技術(precise point positioning,PPP)可以實現亞納秒量級的授時精度,雖不受基線長度的限制,但嚴重依賴實時精密衛星軌道和歸算到標準時間的衛星鐘差產品。除此之外,PPP解算還需要進行復雜的系統誤差改正和參數估計等[5],具有較高的技術門檻。對于城域范圍內短距離高精度時間用戶,基于實時動態定位(real-time kinematic,RTK)的思想,可以有效解決PPP時間傳遞較高技術門檻和計算資源成本的問題。RTK授時的核心是將RTK定位技術應用到授時中,流動站通過通信鏈路實時接收基準站的觀測數據,并與本站的觀測數據形成一次差分,從而求解流動站與基準站的相對鐘差。當基準站外接授時實驗室標準時間頻率信號UTC(k)時,RTK授時解算的鐘差即為流動站的站鐘相對于標準時間的相對鐘差[6-7], 從而達到授時的目的。
近年來,伴隨著移動通信技術的蓬勃發展,有關RTK授時技術的研究逐漸增多。馮延明等人在2010年提出了同時解算接收機位置和相對鐘差的4DRTK數學模型并進行了性能分析[8]。2021年董孝松等人以GPS(global positioning system)為例,基于2個月觀測數據分析了短基線RTK授時性能,試驗表明GNSS RTK授時精度能夠達到亞納秒量級[5]。北斗三號全球導航衛星系統(BeiDou-3 navigation satellite system,BDS-3)正式開通運行,2021年孫保琪等人基于BDS-3新體制信號開展了短基線、零基線RTK授時試驗,結果表明短基線授時精度優于0.2 ns,站間鐘差的頻率穩定度萬秒穩在10-15量級;零基線授時精度可達0.02 ns,萬秒穩在10-16量級[6]。另有文獻[9-12]研究了基于載波相位差分定位技術的時間傳遞。
然而RTK授時技術主要面向城域范圍內的時間用戶。在城市環境下,高樓大廈對GNSS信號的遮擋比較嚴重,當用戶接收機接收的衛星數量較少或衛星空間幾何結構較差時將會影響授時解算結果。隨著全球衛星導航系統的迅猛發展,繼美國的GPS、俄羅斯的格洛納斯衛星導航系統(global navigation satellite system,GLONASS)后,歐盟正在開發的伽利略衛星導航系統(Galileo satellite naviga-tion system,Galileo),我國已全面建成的BDS-3,為城域環境下GNSS多系統融合增加可觀測衛星數目、改善衛星空間幾何結構提供了保證[13-14]。
目前有關RTK授時的研究主要是基于GPS和BDS-3等單系統開展的,有關GNSS多系統融合RTK授時的研究還鮮有報導。為了更好地驗證GNSS多系統融合RTK授時的性能,提高城域環境下的可靠性,本文首先給出多系統RTK授時的觀測方程,其次利用中國科學院國家授時中心(National Time Service Center,NTSC)的時頻資源,基于GPS、BDS-3和Galileo的觀測數據開展GNSS多系統融合RTK授時試驗,從授時精度、收斂時間和穩定度3個方面展開分析。
1 Multi-GNSS RTK授時原理及數學模型
RTK授時原理與RTK定位相似,其原理為用戶接收機通過通信鏈路實時接收基準站的偽距和載波相位觀測數據,與用戶接收機形成站間一次差分,解算用戶接收機鐘差與用戶的三維坐標等。當兩測站相距不遠時,電離層延遲和對流層折射的影響具有很強的相關性,因而站間單差可消除大部分大氣折射誤差的影響。多系統RTK授時以GPS系統鐘差為基準,分別引入其他系統與GPS的系統間偏差[14](inter-system bias,ISB),觀測方程可表示為

RTK授時的參數估計采用擴展卡爾曼濾波的方式進行。對上述觀測方程及狀態方程線性化后可得
Xk=Φk,k-1Xk-1+Wk-1
Zk=HkXk+Vk
上式中,Xk為狀態向量;Φk,k-1為狀態轉移矩陣;Zk為線性化后的觀測值向量;Hk為設計矩陣;Wk-1為過程噪聲向量;Vk為觀測噪聲向量;記過程噪聲向量的方差為Qk;記觀測噪聲的方差為Rk。

其中增益矩陣Kk為

動態或靜態模式下,RTK授時中狀態向量參數估計包括接收機三維坐標、相對鐘差和載波相位模糊度。其中根據流動站接收機動態性能的不同,接收機位置參數可設置為動態、靜態參數,分別對應不同的狀態轉移矩陣。如果還引入流動站的三維坐標參數,此時為固定站坐標模式,對應的參數估計只包括相對鐘差和載波相位模糊度。
2 試驗平臺與策略
2.1 試驗平臺
依托中國科學院國家授時中心臨潼本部和西安場區時間頻率資源,建立由兩條基線(長度為32.85 km)SE22-SEPT和XIA6-SEPT組成的RTK授時試驗平臺(圖 1)。西安場區時間實驗室作為時間基準站,主鐘為一臺高性能被動型氫原子鐘,通過光纖雙向時間頻率傳遞鏈路實時駕馭到UTC(NTSC)。SEPT為時間基準站北斗/GNSS接收機,外接氫原子鐘10 MHz和1PPS信號。XIA6和SE22位于臨潼本部測定軌大廳,均外接UTC(NTSC)10 MHz和1PPS信號,且共用同一接收機天線。三臺接收機的型號均為Septentrio PolaRx5TR,天線型號為SEPCHOKE_B3E6。
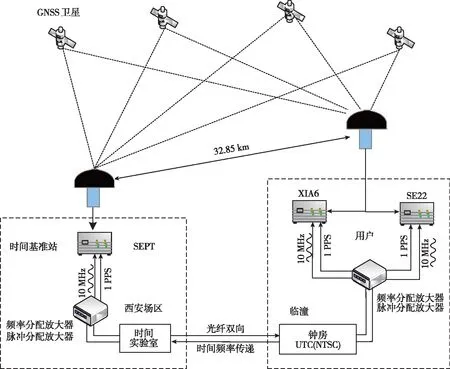
圖1 RTK授時試驗平臺Fig.1 RTK timing test platform
時間基準站原子鐘與UTC(NTSC)之間通過光纖雙向時間頻率傳遞技術[15](two-way optical time and frequency transfer ,TWOTF)進行實時比對,比對結果采樣率為1Hz。根據比對結果,采用調頻的方式將時間基準站原子鐘駕馭到UTC(NTSC)。本文中將光纖雙向時間頻率傳遞的時間比對結果作為短基線RTK授時的精度評估標準。另外文中目前對RTK授時只解算了用戶相對于標準時間的時間偏差,沒有根據解算的時間偏差對用戶時鐘進行駕馭。
2.2 試驗策略
基于改編的RTKLIB軟件[16],分別以SE22、XIA6為流動站,SEPT為基準站開展短基線多系統單頻和雙頻RTK授時試驗,涉及動態(kinematic)、靜態(static)、固定站坐標(fixed)3種授時模式(動態模式指接收機處于運動狀態,即接收機的位置在發生變化;靜態模式指接收機處于靜止狀態,即接收機的位置不發生變化,但位置坐標未知;固定站坐標模式指接收機處于靜止狀態且位置坐標已知)。實際試驗時3種模式的流動站均靜態安置。其中單頻利用GPS L1、BDS-3 B1C、Galileo E1的觀測值,雙頻利用L1/L2、B1C/B2a、E1/E5b觀測值組合,觀測數據時段為2021年4月19日—2021年4月30日。詳細解算設置如表 1所示,其中截止高度角設置為15°,在保證觀測衛星數量的同時降低多路徑效應帶來的干擾。
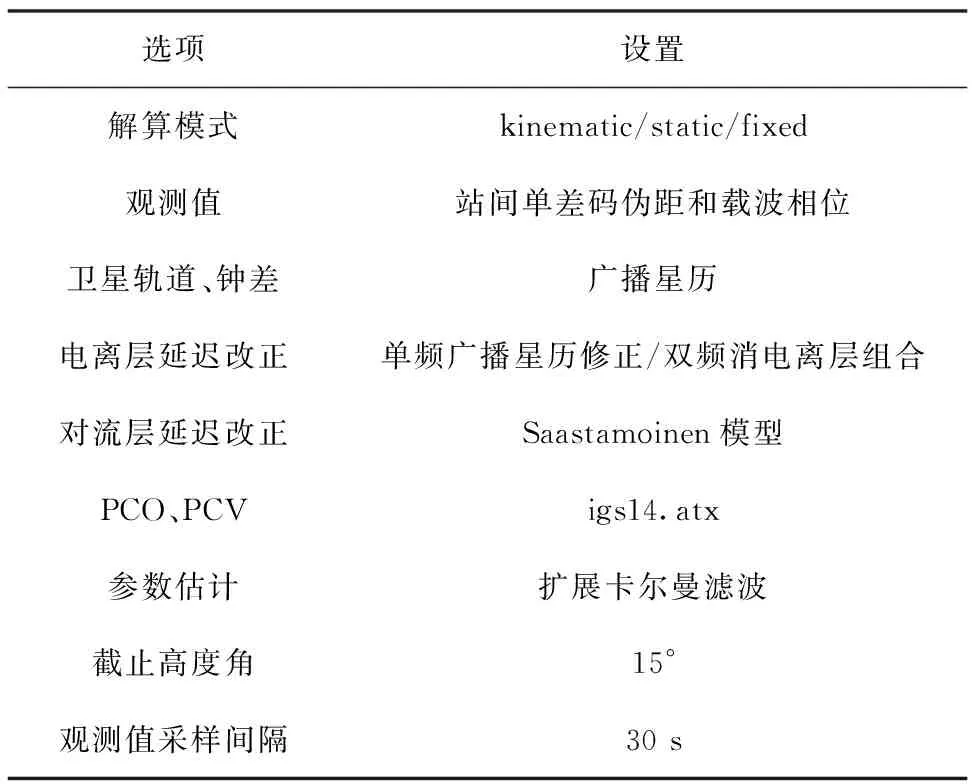
表1 RTK授時解算策略Tab.1 RTK timing solution strategy
3 結果與分析
3.1 可見衛星數
圖2給出截止高度角為15°時,試驗時段兩條基線GPS、BDS-3、Galileo的可見衛星數,GPS與BDS-3的平均可見衛星數為8個,Galileo的平均可見衛星數為5個,三系統可見衛星總數在22個左右。相比于GPS單系統,多系統融合顯著增加了可觀測衛星的數量,這也使得整個GNSS的可靠性和可用性得到提高。

圖2 可見衛星數Fig.2 Number of visible satellites
3.2 多系統RTK授時結果
圖 3和圖 4給出了SE22單頻和雙頻GPS(a)、多系統(b)RTK授時結果,XIA6的結果與SE22類似,由于篇幅原因不再展示。因為信號傳輸電纜較長,且經過多級頻分、脈分設備,SEPT與SE22兩接收機外接時間信號的延遲在700 ns左右。三系統融合12天的授時結果均比較連續平穩。不考慮收斂過程,單頻RTK授時靜態和固定站坐標模式下峰峰值偏差約在1 ns,動態模式下峰峰值偏差約在2 ns;雙頻RTK授時三種模式的峰峰值偏差均在1 ns。動態、靜態和固定站坐標3種模式的結果趨勢符合性較好,但由于每個歷元解算一組坐標參數,動態模式的結果噪聲最大,固定站坐標模式的收斂時間最短。動態模式下多系統RTK授時結果與GPS單系統相比,鐘差起伏更小;動態模式下雙頻RTK授時結果的噪聲明顯小于單頻RTK授時。
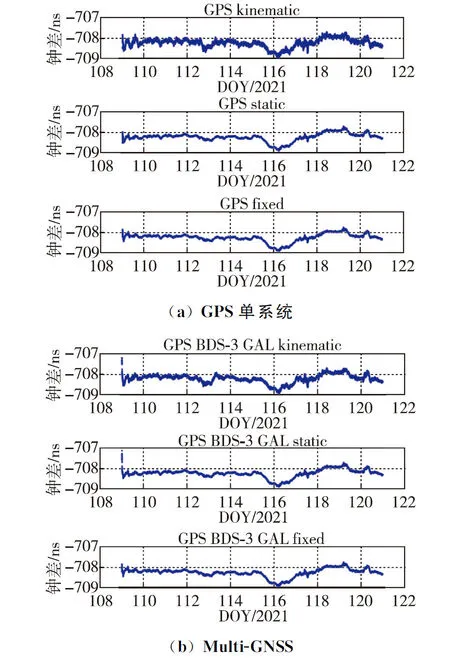
圖3 SE22單頻RTK授時結果Fig.3 SE22 single-frequency RTK timing results
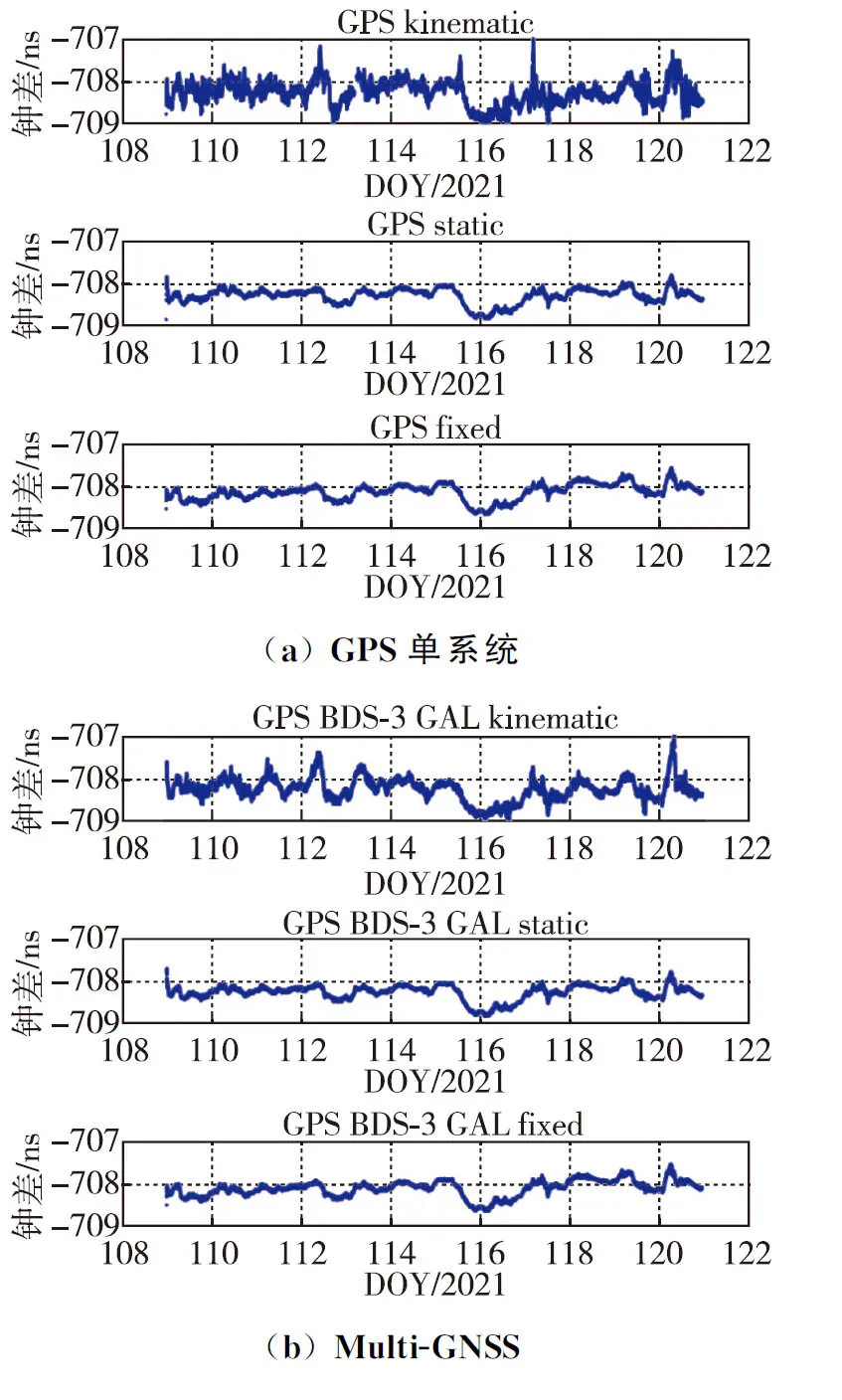
圖4 SE22雙頻RTK授時結果Fig.4 SE22 Dual-frequency RTK timing result
3.3 系統間偏差
多系統RTK授時的站間單差ISB可以間接表征基準站與流動站接收機設備時延的一致性情況,后文中提到的ISB均指站間單差的ISB。通過對站間鐘差進行單歷元求解,分別得到BDS-3、Galileo與GPS的ISB,并對12 d內的ISB變化進行分析。以單頻RTK授時為例,圖 5和圖 6分別為2021年4月19日—30日SE22-SEPT與XIA6-SEPT基線的ISB時間序列。表 2給出了這些ISB的統計信息,包括均值(MEAN)和標準偏差(STD)。從這些結果中可以看出,3種模式下兩條基線的ISB均趨近于0,標準偏差均小于0.1 ns。因為SEPT、SE22和XIA6的接收機類型相同,且所處環境的溫度差別很小,由此可以看出這3臺接收機設備時延的一致性比較好。相比BDS-3,Galileo與GPS的ISB均值更小,這可能得益于Galileo衛星較高質量的信號特點。由于試驗中兩條基線的ISB具有較高穩定性,后續可進行建模處理。
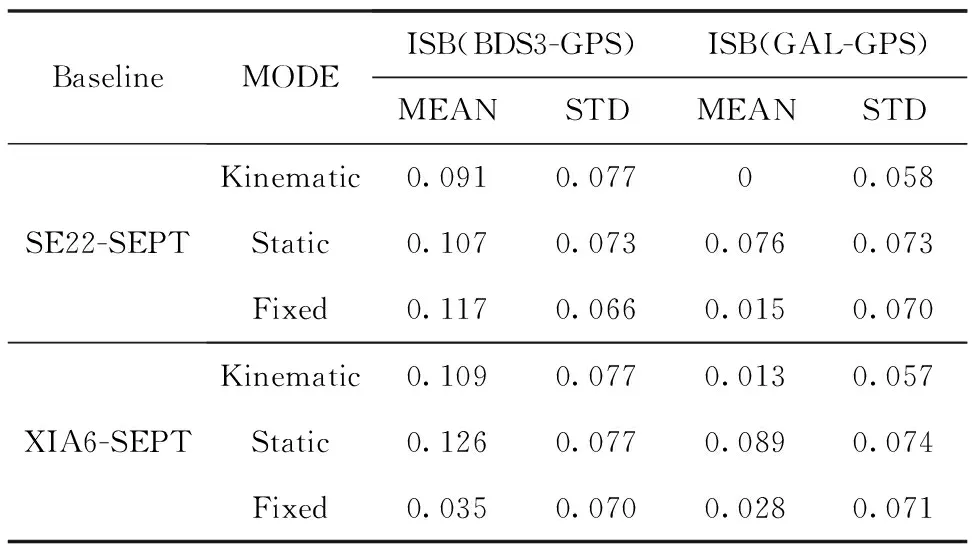
表2 ISB統計信息Tab.2 ISB Statistics ns
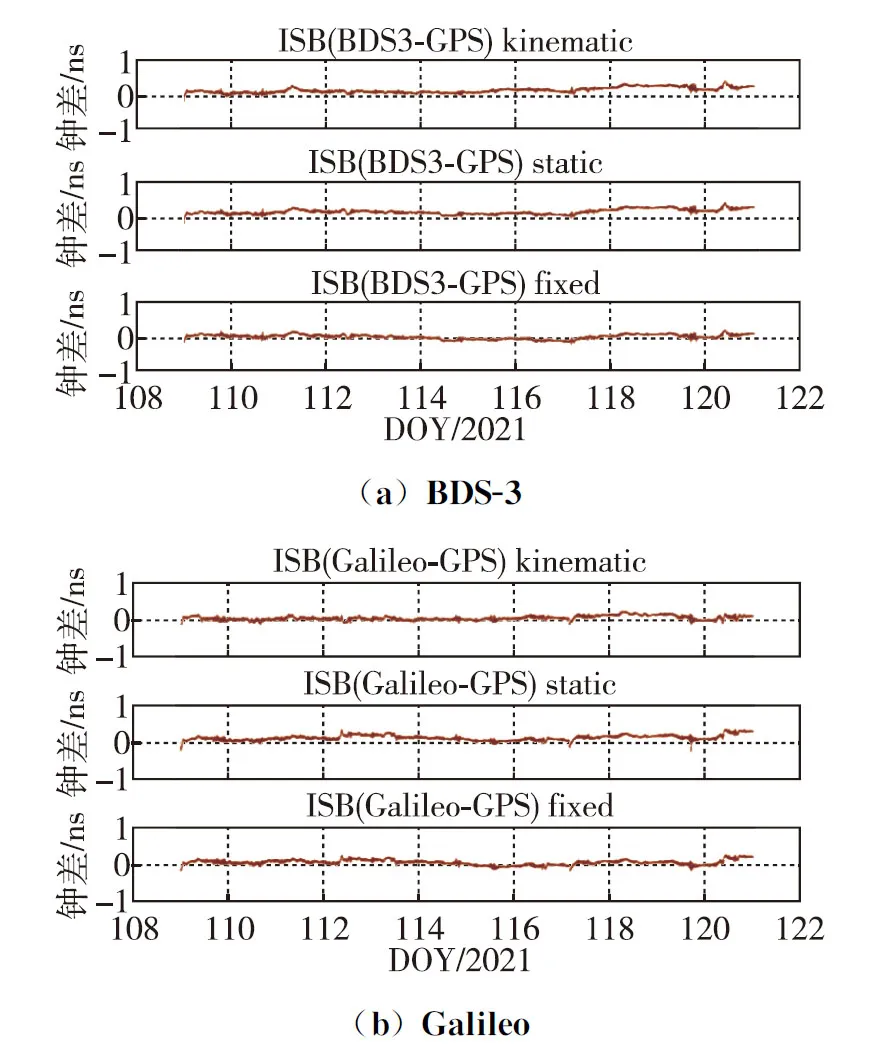
圖5 SE22-SEPT基線 BDS-3、Galileo與GPS的系統間偏差Fig.5 Intersystem bias between SE22-SEPT baseline BDS-3, Galileo and GPS
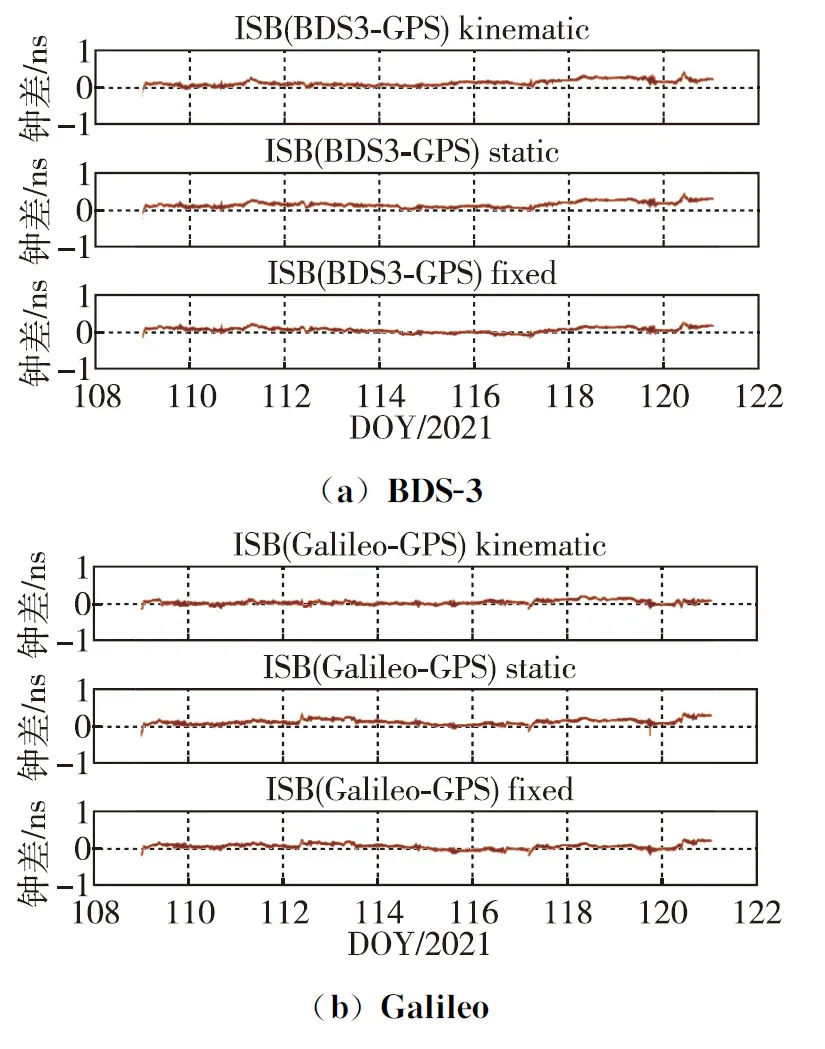
圖6 XIA6-SEPT基線 BDS-3、Galileo與GPS的系統間偏差Fig.6 Systematic deviation between XIA6-SEPT baseline BDS-3, Galileo and GPS
3.4 授時精度
試驗平臺臨潼-西安兩地鐘房之間部署了光纖雙向時間頻率傳遞設備,時間傳遞精度優于100 ps[15],以此作為參考,評估RTK授時的精度。圖 7給出了2021年第109天—2021年第114天共6 d的光纖雙向時間頻率傳遞結果。從圖 7中可以看出,時間基準站原子鐘與UTC(NTSC)時間偏差峰峰值小于0.6 ns,大部分時段在±0.2 ns以內,標準偏差為0.07 ns,這表明時間基準站原子鐘能夠以較高的精準度實時駕馭到標準時間。
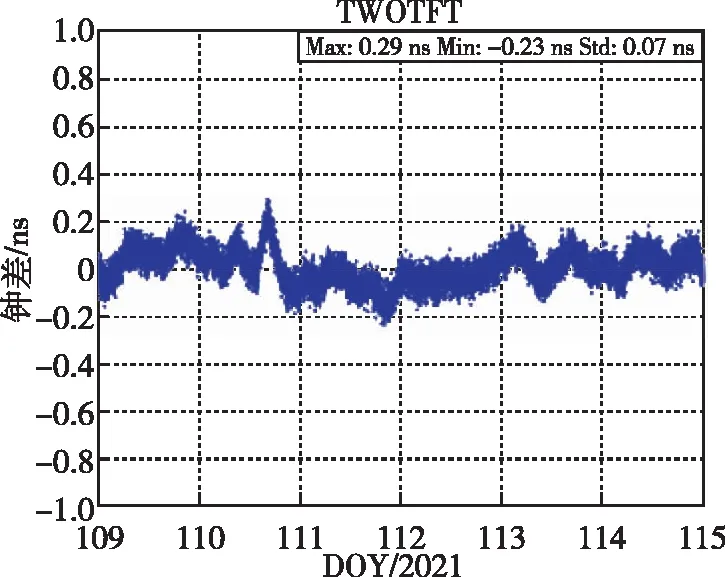
圖7 光纖雙向時間頻率傳遞結果Fig.7 Optical fibre two-way time-frequency transfer results
因篇幅原因僅給出SE22單頻和雙頻RTK授時結果與光纖雙向時間傳遞結果的差異(圖 8和圖 9),其中(a)代表GPS單系統,(b)代表多系統。從授時差異圖中可以看出,兩種授時方式的差值存在一個-708 ns 的絕對誤差,這主要是因為RTK授時中SEPT與SE22兩接收機外接時間信號的延遲所造成的;不考慮收斂過程情況下單頻動態模式峰峰值差異小于2 ns,單頻靜態、固定站坐標模式以及雙頻3種模式峰峰值差異均小于1 ns。表 3給出了兩條基線兩種授時結果差異的標準偏差,同時計算了多系統RTK授時與TWOTFT差異標準偏差相比GPS單系統減少的百分比。動態模式下,兩條基線單頻多系統授時精度相比GPS單系統分別提高9.13%和9.01%,靜態模式分別提高6.09%和11.76%,固定站坐標模式分別提高3.04%和5.79%;雙頻多系統動態模式授時精度分別提高2.92%和3.01%,靜態模式分別提高4.65%和2.41%,固定站坐標模式幾乎沒有改進。與光纖雙向時間傳遞相比,單頻RTK授時結果差異STD優于0.25 ns,雙頻優于0.15 ns。與GPS單系統相比,多系統單頻RTK授時精度改進較雙頻更為明顯。
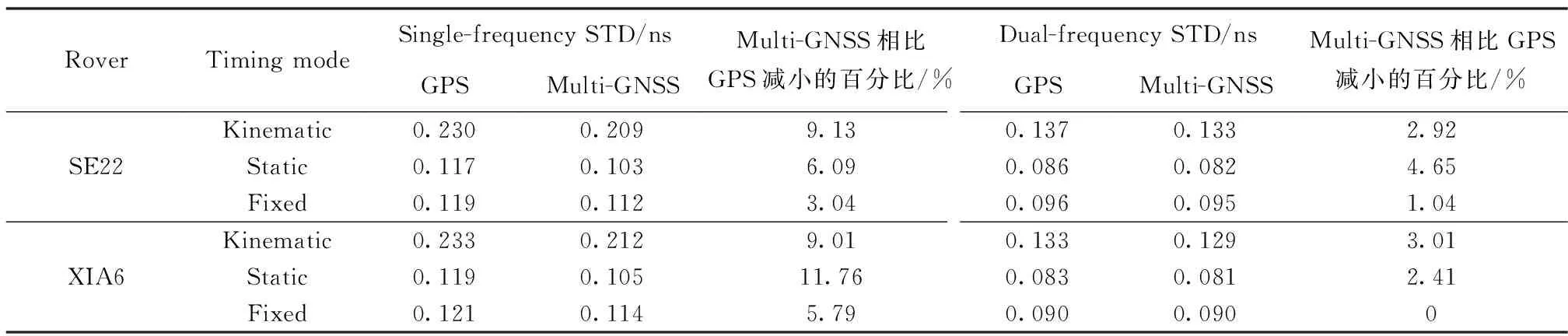
表3 RTK授時與TWOTFT差異標準偏差Tab.3 Standard deviation of difference between RTK timing and TWOTFT
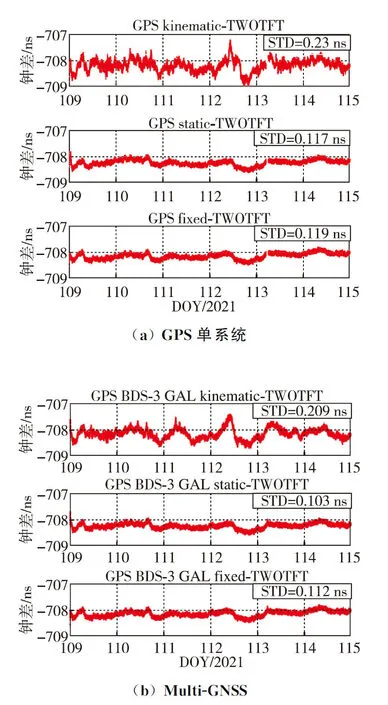
圖8 SE22單頻RTK授時與光纖雙向時間頻率傳遞結果差異Fig.8 Differences between SE22 single-frequency RTK and optical fibre two-way time-frequency transfer
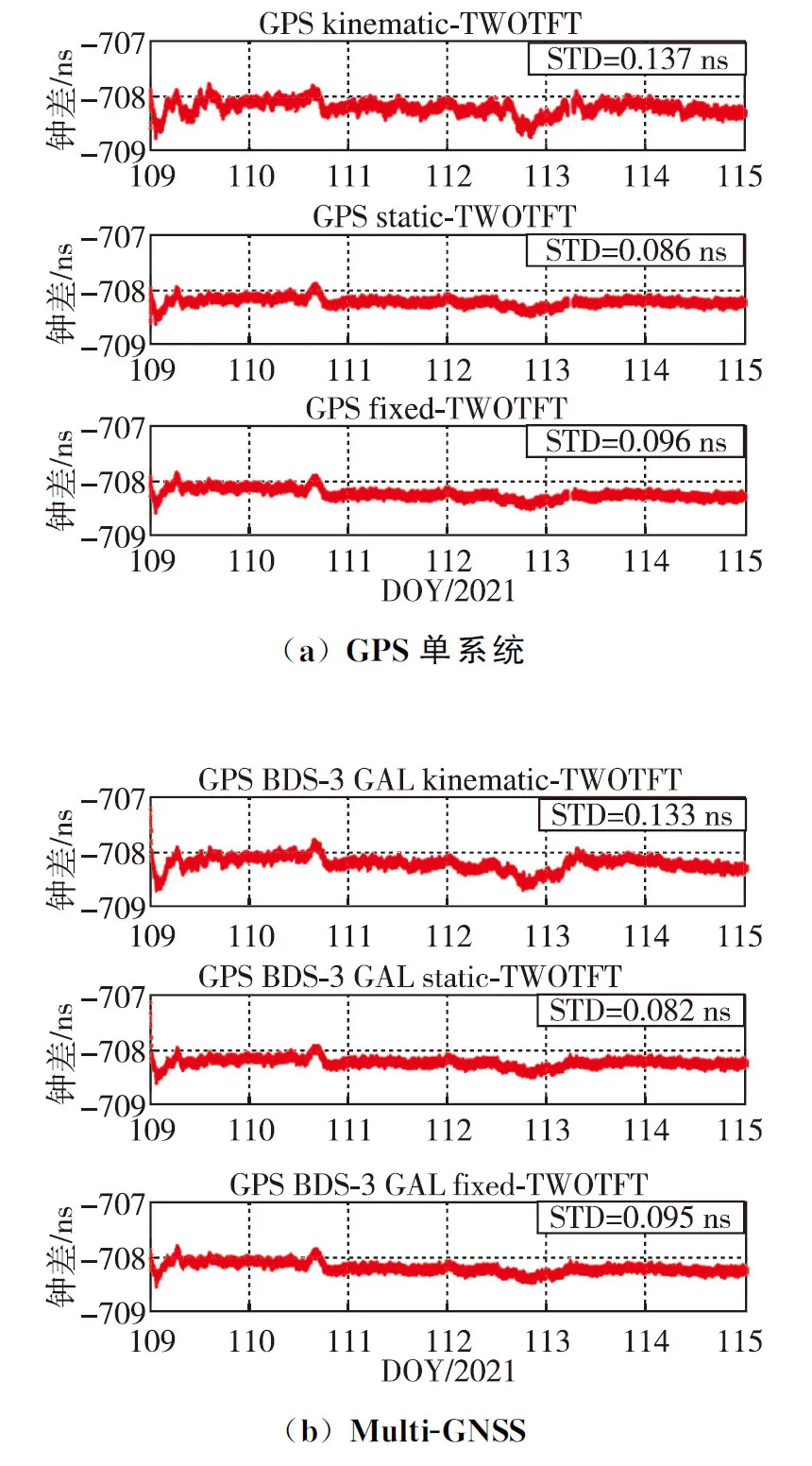
圖9 SE22雙頻RTK授時與光纖雙向時間頻率傳遞差異Fig.9 Differences between SE22 dual-frequency RTK timing and optical fibre two-way time-frequency transmission
3.5 收斂時間分析
為量化動態模式和靜態模式下多系統RTK授時相比GPS單系統收斂時間縮短的程度,依據流動站的精密坐標,以流動站三維坐標收斂時間間接表征授時收斂時間,規定收斂時間為解算三維方向定位誤差小于1 dm并保持至少10個歷元所需要的時間[17]。最終以12 d收斂時間的平均值作為最終的收斂時間,并計算了多系統RTK授時相比GPS單系統收斂時間縮短的百分比,如表 4和圖 10所示。
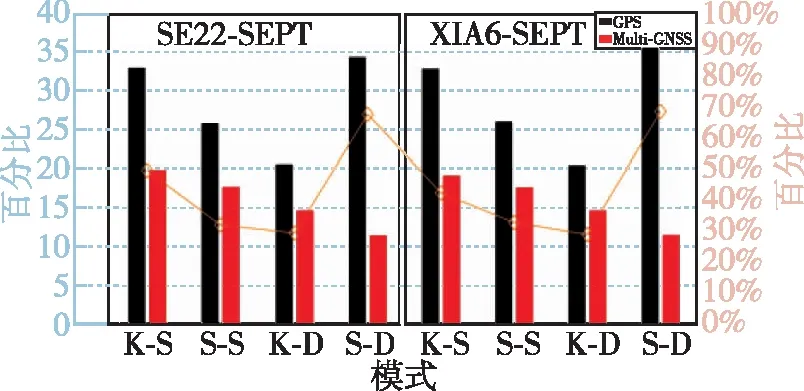
圖10 GPS單系統/Multi-GNSS RTK授時的收斂時間Fig.10 Convergence time of GPS single system/Multi-GNSS RTK timing
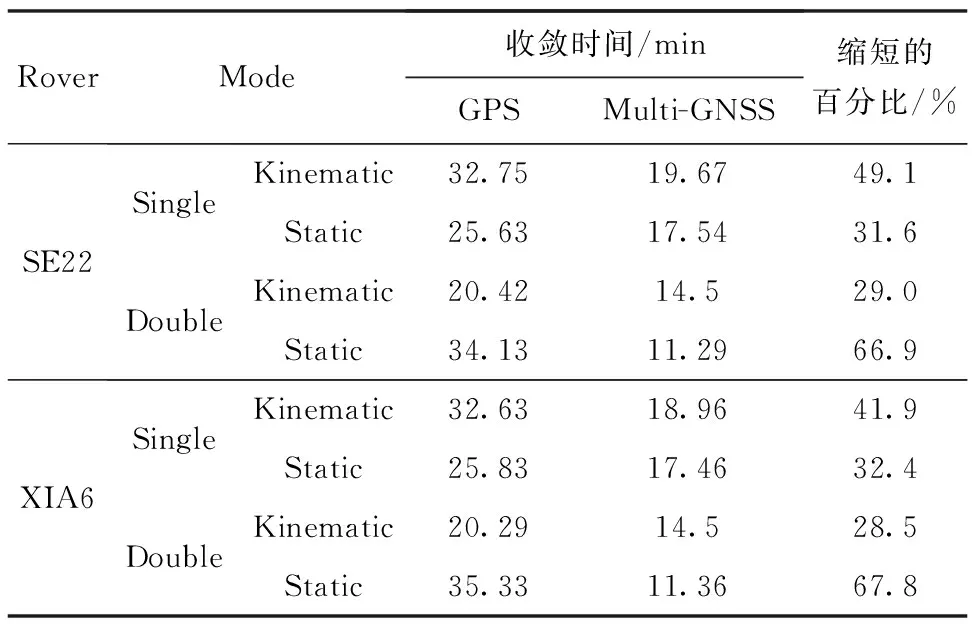
表4 RTK授時的收斂時間Tab.4 Convergence time of RTK timing
圖10中黃線代表多系統相比GPS單系統收斂時間縮短的百分比,橫坐標中K-S、S-S、K-D和S-D分別表示單頻動態模式、單頻靜態模式、雙頻動態模式和雙頻靜態模式。由圖 10可以看出GPS單系統RTK授時的收斂時間都在20 min以上,而多系統的收斂時間都小于20 min,多系統雙頻靜態模式下收斂時間最短,為11.29 min;動態模式和靜態模式下多系統RTK授時的收斂時間明顯比GPS單系統縮短,且至少縮短25%以上;靜態模式下雙頻RTK收斂時間縮短最多,兩條基線分別縮短66.9%和67.8%。多系統融合使得可見衛星數大幅增多,從而使RTK授時的收斂時間有顯著的縮短。
3.6 穩定度
對時間傳遞穩定度的評價,目前常采用美國學者D.W.Allan提出的表征方法,即阿倫方差[18],該方法通過多次測量后計算振蕩器噪聲標準差的平均值來描述頻率的波動情況。RTK授時站間鐘差的頻率穩定度以修正Allan偏差(modified Allan deviation,MDEV)表示,如圖 11和圖 12所示,(a)代表單頻,(b)代表雙頻,將所有固定站坐標模式站間鐘差的頻率穩定度結果以子圖的方式呈現在主圖的左下角。多系統RTK授時3種模式萬秒穩均進入10-15量級。固定站坐標模式下,多系統RTK授時站間鐘差的頻率穩定度與GPS單系統幾乎一致。
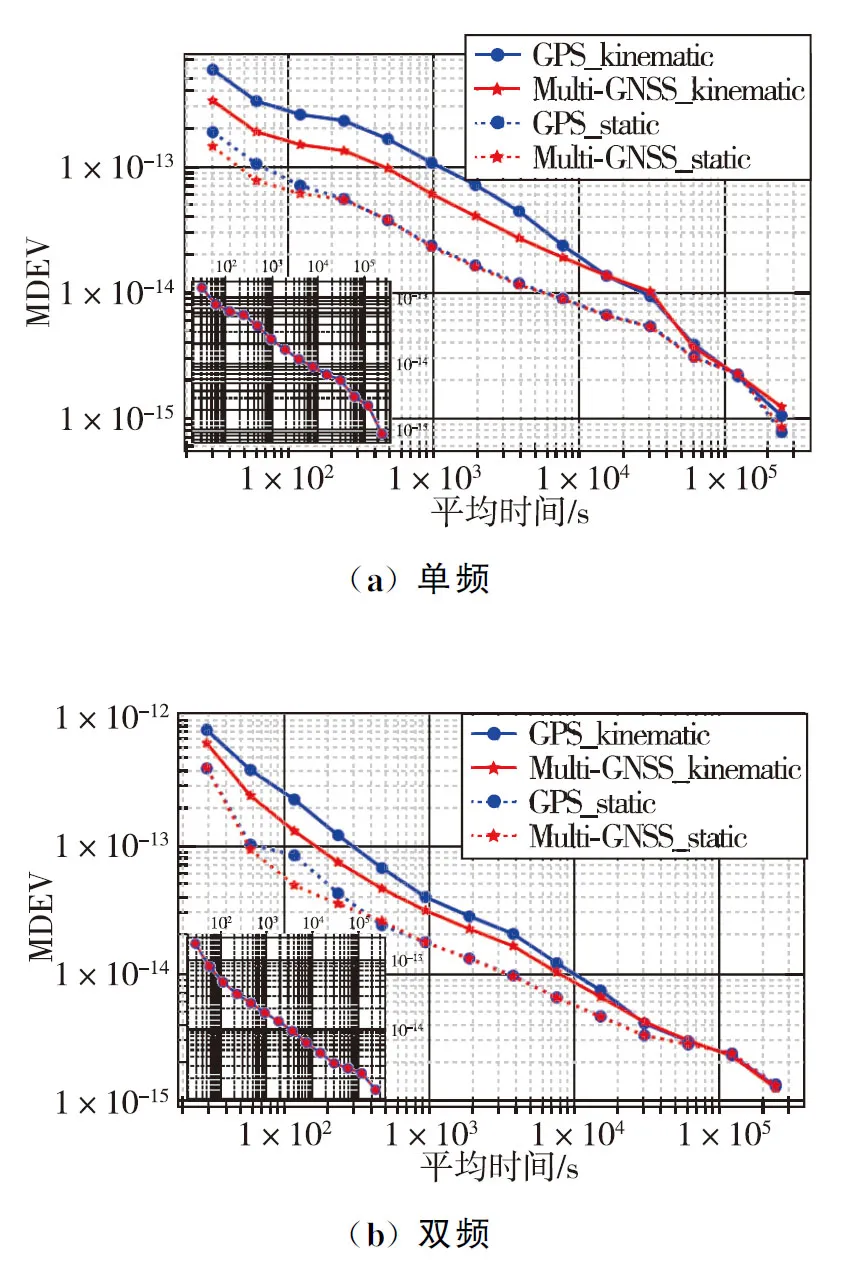
圖11 SE22授時頻率穩定度Fig.11 SE22 timing frequency stability
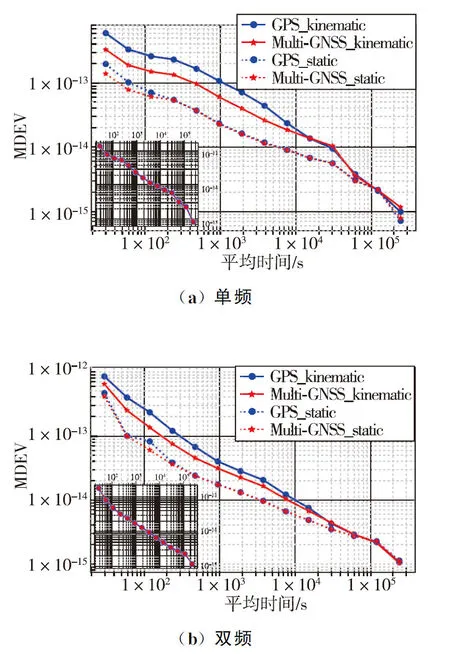
圖12 XIA6授時頻率穩定度Fig.12 XIA6 timing frequency stability
對于單頻RTK授時,平均時間120 s,動態模式下兩條基線多系統的時間傳遞穩定度比GPS單系統分別提高42.5%和42.3%,靜態模式下分別提高13.8%和14.2%;平均時間960 s,動態模式分別提高43.8%和43.75%,靜態模式分別提高2.92%和2.81%。對于雙頻RTK授時,平均時間120 s,動態模式分別提高43.44%和42.09%,靜態模式分別提高42.12%和27.18%;平均時間960 s,動態模式分別提高21.74%和22.26%,靜態模式分別提高0.33%和1.23%。動態模式下多系統RTK授時的穩定度相比GPS單系統有著明顯的優勢,靜態模式下也有一定程度的改善。動態和靜態模式下,多系統RTK授時的短期穩定度相比GPS單系統有著不同程度的改善,但隨著平均時間的增長,這種改善也在明顯減弱。
4 結論
利用中國科學院國家授時中心3個GNSS跟蹤站的BDS-3、GPS和Galileo觀測數據,開展短基線多系統單頻和雙頻RTK授時試驗,涉及動態、靜態和固定站坐標3種模式,兩條基線的結果表明:
1)與光纖雙向時間頻率傳遞結果比對,多系統單頻RTK授時結果差異STD優于0.25 ns,雙頻優于0.15 ns。3種模式下單頻多系統RTK授時相比GPS單系統均有一定程度的改善,雙頻改善較少。動態模式下,單頻多系統授時精度較GPS單系統分別提高9.13%和9.01%,靜態模式分別提高6.09%和11.76%,固定站坐標模式分別提高3.04%和5.79%。
2)多系統融合使得RTK授時的收斂時間比GPS單系統明顯縮短,且至少縮短25%以上。靜態模式下雙頻RTK收斂時間縮短最多,兩條基線分別縮短66.9%和67.8%。
3)多系統RTK授時3種模式站間鐘差的萬秒穩均進入10-15量級,平均時間在120~960 s,動態模式和靜態模式下短期穩定度相比GPS單系統均有著明顯的改善,但隨著平均時間的增長,這種改善也在明顯減弱。
4)3臺接收機設備時延的一致性比較好。3種模式下RTK授時的站間鐘差ISB具有較高穩定性,后續可將其建模處理。
相比GPS單系統,多系統GNSS顯著增加了可觀測衛星的數量,使得動態模式和靜態模式下RTK授時的收斂速度和短期穩定度得到顯著的提高,授時精度也有一定程度的改善。試驗結果可為城域環境下GNSS多系統RTK授時的應用推廣提供一定的參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32