GNSS實(shí)時(shí)衛(wèi)星鐘差估計(jì)在地震監(jiān)測(cè)中的應(yīng)用
2023-07-08 07:54:40王浩浩莊文泉
導(dǎo)航定位與授時(shí) 2023年3期
關(guān)鍵詞:系統(tǒng)
王浩浩,郝 明,莊文泉
(中國(guó)地震局第二監(jiān)測(cè)中心,西安 710054)
0 引言
近年來(lái),隨著全球?qū)Ш叫l(wèi)星系統(tǒng)(global navigation satellite system, GNSS)高頻定位技術(shù)的不斷發(fā)展,其在地殼運(yùn)動(dòng)監(jiān)測(cè)領(lǐng)域發(fā)揮著越來(lái)越重要的作用,為地震監(jiān)測(cè)提供了一種有效的新型技術(shù)途徑[1-2]。其中,利用差分相對(duì)定位技術(shù)可以計(jì)算得到監(jiān)測(cè)站相對(duì)于某一固定參考站毫米級(jí)的動(dòng)態(tài)位移,但監(jiān)測(cè)區(qū)域內(nèi)有時(shí)因地質(zhì)條件等客觀因素難以布設(shè)觀測(cè)環(huán)境良好、穩(wěn)定的基準(zhǔn)站,而且坐標(biāo)精確已知的基準(zhǔn)站在強(qiáng)震發(fā)生階段可能會(huì)發(fā)生移動(dòng),導(dǎo)致動(dòng)態(tài)解算的定位精度顯著降低[3-4]。而采用國(guó)際GNSS服務(wù)(international GNSS service, IGS)組織發(fā)布的精密衛(wèi)星軌道和鐘差等產(chǎn)品的精密單點(diǎn)定位(precise point positioning, PPP)技術(shù),具有不依賴于某一特定參考基準(zhǔn)站、實(shí)時(shí)性強(qiáng)等優(yōu)勢(shì),僅利用單臺(tái)GNSS接收機(jī)即可獲得國(guó)際地球參考框架下高精度的“絕對(duì)位置”,具備準(zhǔn)確捕捉地震位移波形的能力,更適合長(zhǎng)距離、大范圍的地殼形變監(jiān)測(cè)[3-4]。文獻(xiàn)[5]實(shí)驗(yàn)結(jié)果表明,衛(wèi)星鐘差的采樣率越高,利用PPP動(dòng)態(tài)解捕捉遠(yuǎn)場(chǎng)站點(diǎn)形變信息的優(yōu)勢(shì)越明顯。文獻(xiàn)[6]利用武漢大學(xué)自主研發(fā)的PANDA軟件對(duì)高頻GNSS觀測(cè)信號(hào)進(jìn)行PPP后處理,能夠很好地獲取2016-11-13新西蘭Mw7.8地震產(chǎn)生的動(dòng)態(tài)位移特征。
地震瞬時(shí)地表動(dòng)態(tài)位移的實(shí)時(shí)高可靠性監(jiān)測(cè)對(duì)地震預(yù)警系統(tǒng)而言至關(guān)重要,能夠?yàn)檎鹬幸约罢鸺?jí)的快速確定等研究工作提供關(guān)鍵信息[3]。然而,實(shí)時(shí)PPP高精度動(dòng)態(tài)解的實(shí)現(xiàn)取決于精密衛(wèi)星軌道和鐘差的實(shí)時(shí)估計(jì)性能。目前超快速實(shí)時(shí)預(yù)報(bào)軌道產(chǎn)品已經(jīng)能夠滿足其時(shí)效性和可靠性等要求,但衛(wèi)星鐘差的精確預(yù)報(bào)極易受到自身時(shí)頻特性以及復(fù)雜太空環(huán)境的影響,高可靠的厘米級(jí)GNSS實(shí)時(shí)衛(wèi)星鐘差則需利用地面站觀測(cè)數(shù)據(jù)進(jìn)行實(shí)時(shí)估計(jì)得到[7]。文獻(xiàn)[8]實(shí)時(shí)估計(jì)的多模GNSS衛(wèi)星鐘差與武漢大學(xué)最終精密鐘差互差優(yōu)于0.2 ns。文獻(xiàn)[9-10]利用均方根信息濾波實(shí)現(xiàn)GNSS四系統(tǒng)實(shí)時(shí)衛(wèi)星鐘差的快速估計(jì),且與最終精密鐘差產(chǎn)品符合性較好。文獻(xiàn)[11]提出了一種基于序貫最小二乘的在線質(zhì)量控制方法,GNSS四系統(tǒng)實(shí)時(shí)估計(jì)衛(wèi)星鐘差的標(biāo)準(zhǔn)差均值優(yōu)于0.1 ns。
鑒于此,本文以長(zhǎng)安大學(xué)北斗分析中心為平臺(tái),基于多模全球?qū)Ш叫l(wèi)星系統(tǒng)實(shí)驗(yàn)跟蹤網(wǎng)(multi-GNSS experiment, MGEX)監(jiān)測(cè)站1 Hz的GNSS觀測(cè)數(shù)據(jù),采用模型嚴(yán)密、精度較高的非差估計(jì)法[12],實(shí)現(xiàn)了多模GNSS衛(wèi)星鐘差的實(shí)時(shí)估計(jì)和性能評(píng)估,并將其用于高頻動(dòng)態(tài)PPP實(shí)時(shí)獲取2021年漾濞Mw6.4地震和瑪多Mw7.4地震發(fā)生時(shí)段的地表形變波形,具體分析震時(shí)點(diǎn)位的運(yùn)動(dòng)變化情況。
1 數(shù)據(jù)處理
1.1 鐘差估計(jì)
本文采用無(wú)電離層組合觀測(cè)值進(jìn)行GNSS衛(wèi)星鐘差的實(shí)時(shí)估計(jì),非差偽距和載波相位的觀測(cè)方程為

(1)

由于公式中的偏差參數(shù)具有很強(qiáng)甚至完全的線性相關(guān)性,將其作為未知數(shù)進(jìn)行估計(jì),不僅會(huì)引入大量待估參數(shù),還會(huì)減弱衛(wèi)星鐘差的估計(jì)精度。其中,衛(wèi)星端的碼偏差參數(shù)具有較高的時(shí)間穩(wěn)定性,可以在觀測(cè)方程中將其合并到衛(wèi)星的鐘誤差參數(shù)中,而且相位延遲偏差可以被相應(yīng)的相位模糊度參數(shù)吸收。進(jìn)而可得觀測(cè)模型

(2)
對(duì)于全球定位系統(tǒng)(global positioning system, GPS)、格洛納斯衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system, GLONASS)、伽利略衛(wèi)星導(dǎo)航系統(tǒng)(Galileo satellite navigation system, Galileo)以及我國(guó)的北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigation satellite system, BDS)而言,不同衛(wèi)星導(dǎo)航系統(tǒng)所采用的時(shí)空基準(zhǔn)以及信號(hào)體制不一致,導(dǎo)致衛(wèi)星信號(hào)在GNSS接收機(jī)內(nèi)部產(chǎn)生系統(tǒng)間偏差(inter system bias, ISB)以及GLONASS所特有的頻率間偏差(inter frequency bias, IFB)[11]。若以GPS時(shí)間系統(tǒng)為基準(zhǔn),則顧及ISB/IFB參數(shù)的GNSS衛(wèi)星鐘差實(shí)時(shí)估計(jì)模型為

(3)

1.2 處理策略
無(wú)電離層組合模型是GNSS精密衛(wèi)星鐘差估計(jì)、精密單點(diǎn)定位等數(shù)據(jù)處理常用的函數(shù)模型,表1總結(jié)了GNSS衛(wèi)星鐘差實(shí)時(shí)估計(jì)以及實(shí)時(shí)動(dòng)態(tài)PPP基于該模型的數(shù)據(jù)處理策略。對(duì)于GNSS衛(wèi)星鐘差的實(shí)時(shí)估計(jì),則是在觀測(cè)方程中將衛(wèi)星鐘誤差作為白噪聲進(jìn)行估計(jì)以免受到鐘跳的影響,將衛(wèi)星軌道和測(cè)站坐標(biāo)作為已知值進(jìn)行改正。對(duì)于GNSS實(shí)時(shí)動(dòng)態(tài)PPP,則是將測(cè)站的位置坐標(biāo)作為待估參數(shù)進(jìn)行估計(jì),將精密衛(wèi)星軌道和衛(wèi)星鐘差作為已知值進(jìn)行改正。

表1 數(shù)據(jù)處理策略Tab.1 Data processing strategy
2 多模GNSS實(shí)時(shí)衛(wèi)星鐘差估計(jì)分析
在MGEX中選取60個(gè)均勻分布在全球的連續(xù)運(yùn)行跟蹤站。從IGS下載2021年5月19日—2021年5月22日連續(xù)4 d所選測(cè)站1 s采樣間隔的GNSS觀測(cè)數(shù)據(jù)用于衛(wèi)星鐘差的實(shí)時(shí)估計(jì)。在實(shí)時(shí)估計(jì)多模GNSS衛(wèi)星鐘差的過(guò)程中,測(cè)站始終處于靜止?fàn)顟B(tài)且位置已知,可以將測(cè)站坐標(biāo)固定到IGS周解。現(xiàn)階段,超快速實(shí)時(shí)預(yù)報(bào)軌道產(chǎn)品與最終精密軌道產(chǎn)品的精度量級(jí)相當(dāng),衛(wèi)星軌道可以固定為武漢大學(xué)提供的包含G/R/E/C四系統(tǒng)軌道的6 h超快速解,以減少待估參數(shù)的個(gè)數(shù)。同時(shí),選擇某一測(cè)站的接收機(jī)鐘差作為參考基準(zhǔn)鐘進(jìn)行約束[15],基于雙頻非差消電離層組合的載波相位和偽距觀測(cè)值,采用序貫最小二乘平差和驗(yàn)后殘差質(zhì)量控制算法,最終估計(jì)得到歷元間隔為5 s的多模GNSS實(shí)時(shí)衛(wèi)星鐘差。
2.1 估計(jì)時(shí)間分析
當(dāng)利用60個(gè)測(cè)站構(gòu)成的地面跟蹤站網(wǎng)進(jìn)行多模GNSS衛(wèi)星鐘差實(shí)時(shí)估計(jì)時(shí),每個(gè)歷元大約需要處理3 000個(gè)觀測(cè)值并對(duì)將近2 000維的矩陣進(jìn)行求逆。每個(gè)歷元需要處理的觀測(cè)值數(shù)目和法方程維數(shù)如圖1所示。為加快高維矩陣的運(yùn)算速度,提高鐘差估計(jì)算法的計(jì)算效率,本文采用LAPACK函數(shù)庫(kù)中相關(guān)的矩陣運(yùn)算解算法方程,以實(shí)現(xiàn)多模GNSS實(shí)時(shí)衛(wèi)星鐘差的快速估計(jì)[16]。圖2統(tǒng)計(jì)了LAPACK方法下,實(shí)時(shí)估計(jì)2021年年積日第141天G/R/E/C四系統(tǒng)衛(wèi)星鐘差時(shí)每個(gè)歷元的計(jì)算時(shí)間。可以得出,在全球分布60個(gè)連續(xù)運(yùn)行跟蹤站的情況下,所有歷元的鐘差估計(jì)耗時(shí)均小于5 s,單歷元鐘差估計(jì)的平均計(jì)算時(shí)間為3.4 s,可見(jiàn)上述算法對(duì)高頻觀測(cè)數(shù)據(jù)的處理效率足以實(shí)時(shí)估計(jì)5 s歷元間隔的多模GNSS衛(wèi)星鐘差。
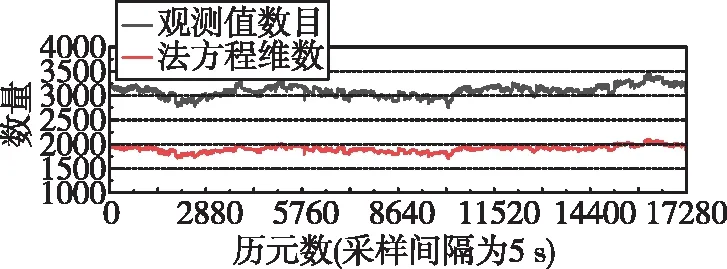
圖1 每個(gè)歷元的觀測(cè)值數(shù)目和法方程維數(shù)Fig.1 The number of observations and the dimension of the normal equation system at each epoch
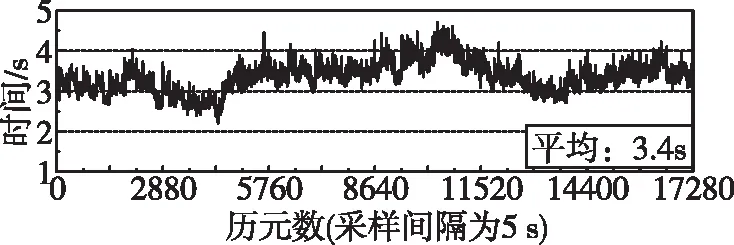
圖2 多模GNSS實(shí)時(shí)鐘差單歷元估計(jì)時(shí)間Fig.2 The computation time for the multi-GNSS real-time clock offset estimation at each epoch
2.2 鐘差精度分析
采用二次差的方法計(jì)算實(shí)時(shí)估計(jì)衛(wèi)星鐘差與武漢大學(xué)最終精密衛(wèi)星鐘差的差異[17],利用該差異統(tǒng)計(jì)其標(biāo)準(zhǔn)差(standard deviation, STD),并與法國(guó)空間研究中心(Centre National D’études Spatiales,CNES)實(shí)時(shí)播發(fā)的衛(wèi)星鐘差產(chǎn)品進(jìn)行對(duì)比,對(duì)多模GNSS實(shí)時(shí)衛(wèi)星鐘差估計(jì)算法的有效性進(jìn)行評(píng)估。考慮到衛(wèi)星鐘差實(shí)時(shí)估計(jì)的收斂時(shí)間,僅對(duì)2021年5月20日—2021年5月22日(年積日第140—142天)的實(shí)時(shí)衛(wèi)星鐘差進(jìn)行精度分析,并在圖3中展示了單顆衛(wèi)星連續(xù)3 d的鐘誤差時(shí)間序列,BDS衛(wèi)星鐘差的整體穩(wěn)定性要弱于其他導(dǎo)航衛(wèi)星系統(tǒng)。同時(shí),GNSS實(shí)時(shí)估計(jì)鐘差與CNES實(shí)時(shí)鐘差產(chǎn)品的精度對(duì)比如表2和圖4所示。其中,表2為GPS、GLONASS、Galileo、BDS各系統(tǒng)單天的平均STD對(duì)比,圖4為GNSS每顆衛(wèi)星連續(xù)3 d的平均STD對(duì)比。
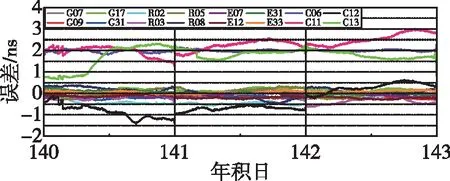
圖3 GPS/GLONASS/Galileo/BDS衛(wèi)星鐘誤差的時(shí)間序列Fig.3 Time series of GPS/GLONASS/Galileo/BDS satellite clock error
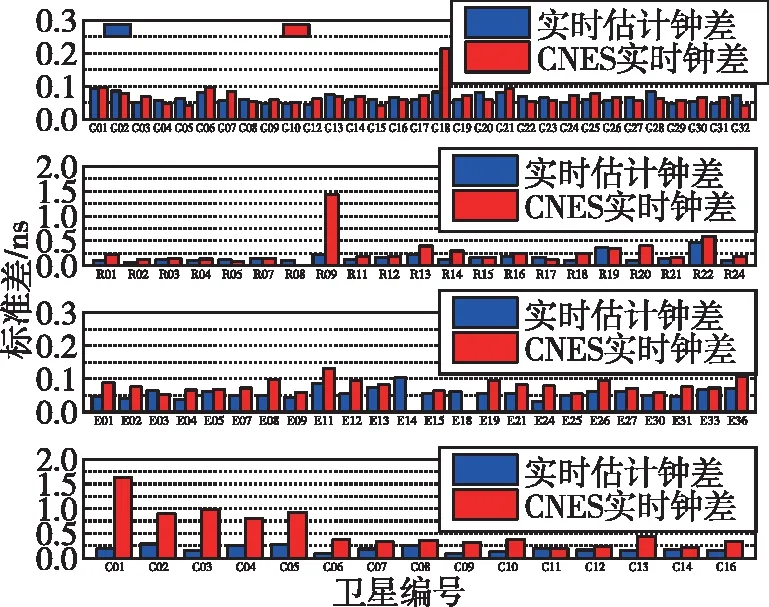
圖4 GPS/GLONASS/Galileo/BDS衛(wèi)星鐘差精度對(duì)比Fig.4 Accuracy comparison of GPS/GLONASS/Galileo/BDS satellite clock
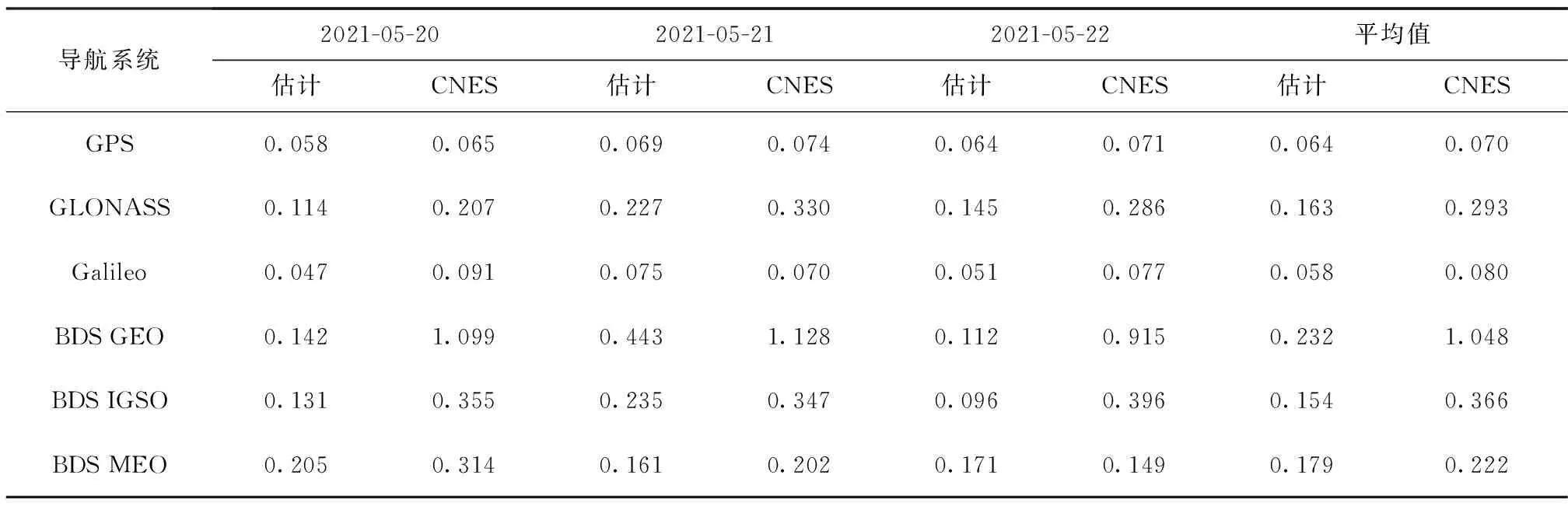
表2 衛(wèi)星鐘差精度統(tǒng)計(jì)Tab.2 Accuracy statistics of satellites clock offset ns
由于衛(wèi)星鐘差與軌道誤差的耦合性,在實(shí)時(shí)估計(jì)多模GNSS衛(wèi)星鐘差時(shí),90%的軌道徑向誤差會(huì)被鐘差所吸收,從而導(dǎo)致實(shí)時(shí)估計(jì)鐘差和最終精密鐘差兩者之間并不完全吻合[18]。結(jié)合表2和圖4可以得出,實(shí)時(shí)估計(jì)GPS衛(wèi)星鐘差的STD數(shù)值區(qū)間為0.044~0.094 ns,每顆GPS衛(wèi)星的鐘差精度均優(yōu)于0.1 ns,整體穩(wěn)定性較好,所有衛(wèi)星的STD均值為0.064 ns。除G18衛(wèi)星的鐘差STD值為0.215 ns外,CNES實(shí)時(shí)播發(fā)的GPS衛(wèi)星鐘差產(chǎn)品與自主估計(jì)的GPS實(shí)時(shí)鐘差精度基本一致,這可能與G18衛(wèi)星的型號(hào)為Block Ⅲ,發(fā)射時(shí)間較晚,CNES的軌道模型還未對(duì)其完全精化有關(guān)。對(duì)于Galileo系統(tǒng)而言,實(shí)時(shí)估計(jì)衛(wèi)星鐘差與CNES實(shí)時(shí)衛(wèi)星鐘差二次差結(jié)果序列相差不大,所有Galileo衛(wèi)星的STD均值分別為0.058 ns和0.080 ns,且每顆衛(wèi)星的鐘差精度基本上均能優(yōu)于0.1 ns,能夠達(dá)到與GPS衛(wèi)星鐘差相當(dāng)?shù)木人?這可能與Galileo衛(wèi)星所搭載的高精度氫原子鐘有關(guān)。CNES實(shí)時(shí)播發(fā)的GLONASS鐘差產(chǎn)品中,R09衛(wèi)星連續(xù)3 d的鐘差精度均將達(dá)到1.5 ns,這是因?yàn)樵撔l(wèi)星的鐘差序列出現(xiàn)多次中斷,導(dǎo)致精度異常。對(duì)于其他GLONASS衛(wèi)星,二次差結(jié)果序列的STD數(shù)值區(qū)間為0.087~0.598 ns,STD均值為0.232 ns,稍差于自主估計(jì)的GLONASS實(shí)時(shí)衛(wèi)星鐘差精度,所有衛(wèi)星的STD均值為0.163 ns。對(duì)于CNES實(shí)時(shí)BDS衛(wèi)星鐘差產(chǎn)品,地球靜止軌道(geostationary Earth orbit,GEO)衛(wèi)星的鐘差精度明顯差于中圓地球軌道(medium Earth orbit,MEO)衛(wèi)星和傾斜地球同步軌道(inclined geosynchronous orbit,IGSO)衛(wèi)星,導(dǎo)致BDS衛(wèi)星鐘差整體精度較差。除GEO衛(wèi)星外,其余MEO/IGSO衛(wèi)星的STD均值為0.294 ns,大約是自主估計(jì)BDS MEO/IGSO實(shí)時(shí)衛(wèi)星鐘差STD均值的2倍。從整體上看,自主估計(jì)的GPS、GLONASS、Galileo、BDS GEO、BDS IGSO和BDS MEO實(shí)時(shí)衛(wèi)星鐘差STD均值分別為0.064、0.163、0.058、0.232、0.154和0.179 ns,要稍優(yōu)于CNES實(shí)時(shí)播發(fā)的衛(wèi)星鐘差產(chǎn)品,兩者G/R/E/C四系統(tǒng)的STD均值分別為0.142 ns和0.347 ns,這是由于在實(shí)時(shí)估計(jì)GNSS衛(wèi)星鐘差時(shí),二者選取測(cè)站的數(shù)據(jù)質(zhì)量和解算策略存在差異所致。
3 震時(shí)地表形變分析
3.1 2021年云南漾濞Mw 6.4地震
為進(jìn)一步評(píng)估實(shí)時(shí)估計(jì)多模GNSS衛(wèi)星鐘差的精度和穩(wěn)定性,利用中國(guó)大陸構(gòu)造環(huán)境監(jiān)測(cè)網(wǎng)絡(luò)(簡(jiǎn)稱“陸態(tài)網(wǎng)絡(luò)”)基準(zhǔn)站2021年5月21日21:45—21:59時(shí)段內(nèi)的高頻GNSS觀測(cè)數(shù)據(jù),基準(zhǔn)站分布情況如圖5所示,采用表1中實(shí)時(shí)動(dòng)態(tài)PPP的數(shù)據(jù)處理策略,基于5 s歷元間隔的GNSS實(shí)時(shí)衛(wèi)星鐘差,在實(shí)時(shí)處理的定位模式下,通過(guò)序貫最小二乘估計(jì)方法,歷元之間不繼承坐標(biāo)信息,分別進(jìn)行GPS單系統(tǒng)、GNSS多系統(tǒng)的高頻動(dòng)態(tài)PPP,并與武漢大學(xué)最終精密衛(wèi)星鐘差的GNSS多系統(tǒng)組合動(dòng)態(tài)PPP結(jié)果進(jìn)行對(duì)比(表3),從而得到不同實(shí)驗(yàn)下2021年云南漾濞Mw6.4地震發(fā)震時(shí)段內(nèi)單歷元高頻動(dòng)態(tài)解的時(shí)間序列。上述3種高頻動(dòng)態(tài)PPP實(shí)驗(yàn)分別對(duì)應(yīng)實(shí)驗(yàn)1、實(shí)驗(yàn)2和實(shí)驗(yàn)3,在不同定位實(shí)驗(yàn)下,云南下關(guān)站(XIAG)、云南云龍站(YNYL)和云南麗江站(YNLJ)在東(East,E)、北(North,N)和高程(Up,U)方向上的動(dòng)態(tài)位移時(shí)間序列如圖6所示,圖中垂直于橫軸的紅色實(shí)線為漾濞地震的發(fā)震時(shí)刻。
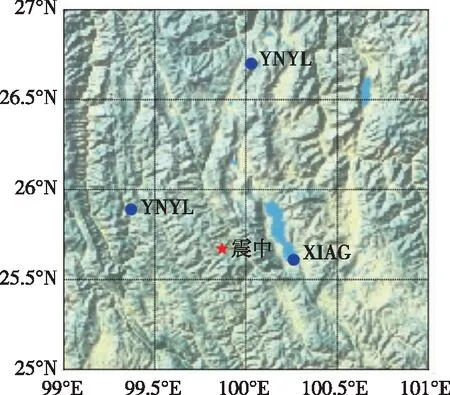
圖5 漾濞地震震中周邊GNSS基準(zhǔn)站分布Fig.5 Distribution of GNSS reference station around the epicenter of Yangbi earthquake
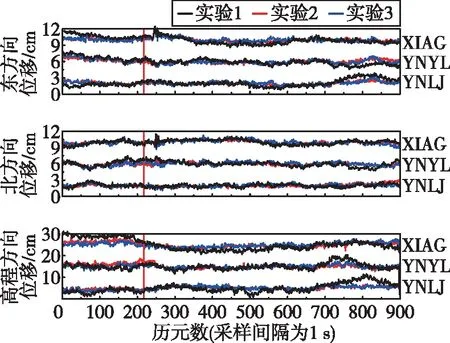
圖6 漾濞地震發(fā)生時(shí)段的動(dòng)態(tài)位移時(shí)間序列Fig.6 The time series of dynamic displacement during the Yangbi earthquake

表3 不同測(cè)站高頻動(dòng)態(tài)PPP的標(biāo)準(zhǔn)差Tab.3 Standard deviation of high-rate kinematic PPP at different stations
由圖6和表3可見(jiàn),隨著其他系統(tǒng)的加入,基于實(shí)時(shí)估計(jì)衛(wèi)星鐘差的GNSS多系統(tǒng)融合精密單點(diǎn)定位的動(dòng)態(tài)位移波形更為穩(wěn)定,其高頻動(dòng)態(tài)解在E、N、U方向上的平均標(biāo)準(zhǔn)差分別為0.4、0.3、1.0 cm,相對(duì)于GPS單系統(tǒng)動(dòng)態(tài)定位結(jié)果的平均標(biāo)準(zhǔn)差,在三個(gè)方向上分別提升了33%、25%和50%,印證了多系統(tǒng)融合定位的優(yōu)越性[19]。同時(shí),自主估計(jì)的GNSS實(shí)時(shí)衛(wèi)星鐘差與武漢大學(xué)最終精密衛(wèi)星鐘差的定位性能相當(dāng),其GNSS多系統(tǒng)組合PPP動(dòng)態(tài)解的平均標(biāo)準(zhǔn)差能夠達(dá)到水平方向0.5 cm左右,垂直方向1.0 cm左右的精度水平。對(duì)于2021年5月21日云南漾濞地震,GNSS高頻動(dòng)態(tài)解可以觀測(cè)到距震中39.7 km的XIAG站在水平方向上具有相對(duì)明顯的波動(dòng),這與文獻(xiàn)[20]漾濞地震的水平位移主要發(fā)生在震中距50 km范圍內(nèi)相吻合。可見(jiàn),基于上述數(shù)學(xué)模型估計(jì)的多模GNSS衛(wèi)星鐘差能夠用于實(shí)時(shí)監(jiān)測(cè)地震發(fā)生階段地表的動(dòng)態(tài)形變特征。
3.2 2021年青海瑪多Mw 7.4地震
據(jù)中國(guó)地震臺(tái)網(wǎng)正式測(cè)定:北京時(shí)間2021年5月22日2時(shí)4分,青海省果洛藏族自治州瑪多縣(震中34.59°N,98.34°E)發(fā)生7.4級(jí)地震,震源深度17 km[21]。此次地震是中國(guó)大陸地區(qū)內(nèi)繼2008年汶川Mw8.0地震后發(fā)生的震級(jí)最大的地震,其劇烈的地殼形變信號(hào)能夠被區(qū)域內(nèi)連續(xù)運(yùn)行的GNSS基準(zhǔn)站可靠監(jiān)測(cè)[22]。為具體分析瑪多Mw7.4地震發(fā)生階段對(duì)周圍地表形變的影響,利用中國(guó)地震臺(tái)網(wǎng)中心提供的震源周邊地區(qū)10個(gè)陸態(tài)網(wǎng)絡(luò)基準(zhǔn)站的高頻GNSS觀測(cè)數(shù)據(jù),這10個(gè)基準(zhǔn)站分別為青海瑪多站(QHMD)、青海瑪沁站(QHMQ)、青海都蘭站(QHDL)、青海班瑪站(QHBM)、青海德令哈站(DLHA)、甘肅瑪曲站(GSMA)、四川甘孜站(SCGZ)、青海格爾木站(QHGE)、青海西寧站(XNIN)和西藏昌都站(XZCD),基準(zhǔn)站分布情況如圖7所示。以地震發(fā)生前3 d的精密坐標(biāo)的平均值為參考值,基于自主估計(jì)的2021年年積日第141天實(shí)時(shí)衛(wèi)星鐘差進(jìn)行GNSS多系統(tǒng)組合實(shí)時(shí)動(dòng)態(tài)PPP,獲取瑪多地震震后5 min時(shí)段內(nèi)不同基準(zhǔn)站高頻動(dòng)態(tài)解在E、N、U方向上隨時(shí)間變化的位移序列,如圖8所示。同時(shí),對(duì)上述10個(gè)基準(zhǔn)站震前3 d以及震后1 d的低頻GNSS觀測(cè)數(shù)據(jù)進(jìn)行事后靜態(tài)PPP處理得到精密坐標(biāo)的單天解,然后分別計(jì)算3個(gè)坐標(biāo)分量上地震前后基準(zhǔn)站位置的坐標(biāo)平均值,通過(guò)差分獲得瑪多地震高可靠性的同震形變[23],并與GNSS多系統(tǒng)組合實(shí)時(shí)動(dòng)態(tài)PPP獲得的同震形變進(jìn)行對(duì)比,具體形變結(jié)果如表4所示。
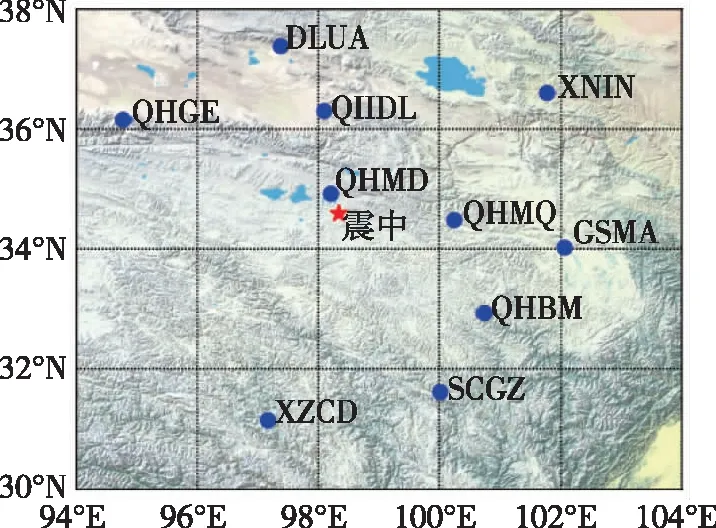
圖7 瑪多地震震中周邊GNSS基準(zhǔn)站分布Fig.7 Distribution of GNSS reference stations around the epicenter of Madoi earthquake
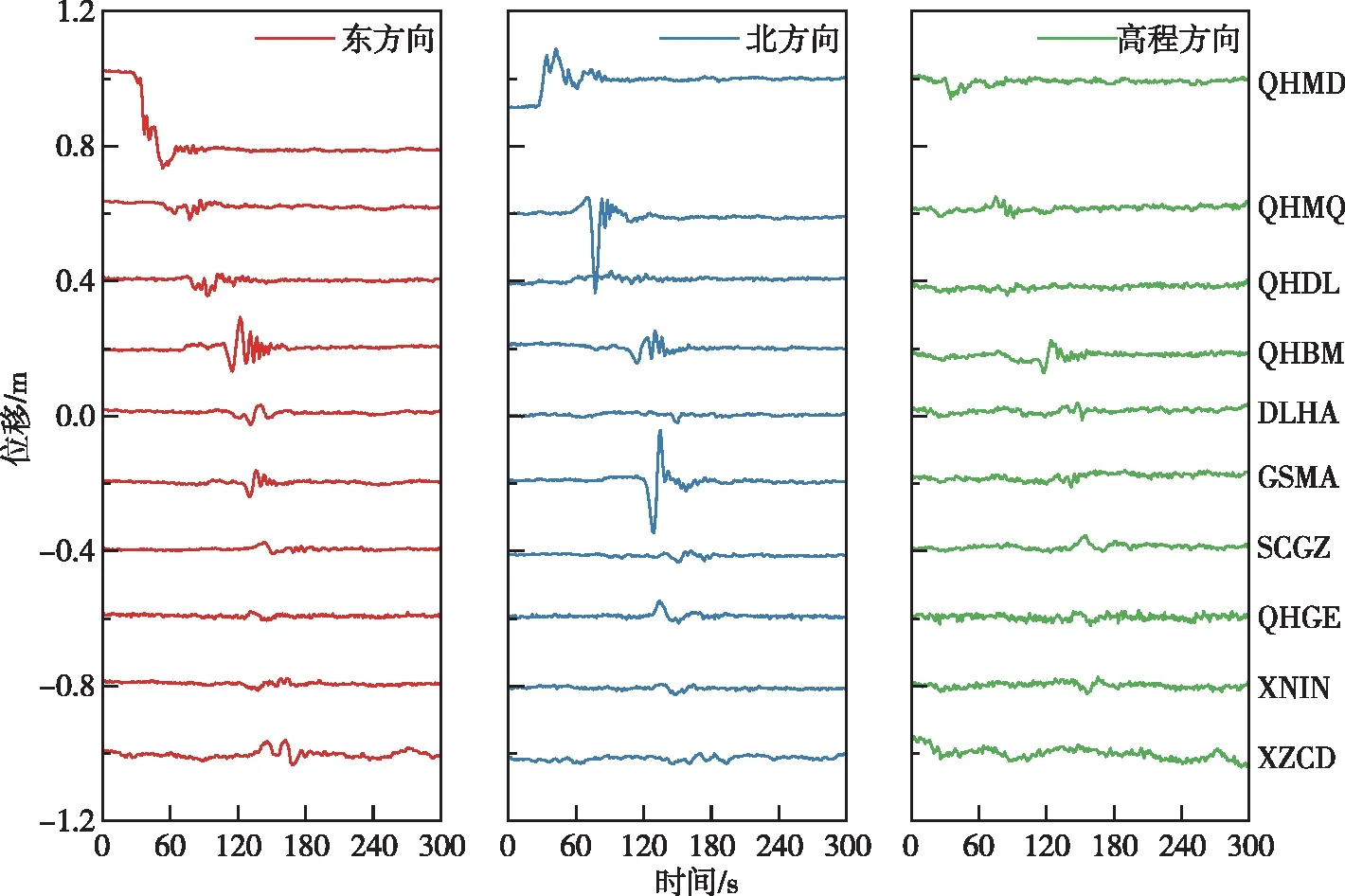
圖8 不同測(cè)站動(dòng)態(tài)位移時(shí)間序列Fig.8 The time series of dynamic displacement at different stations
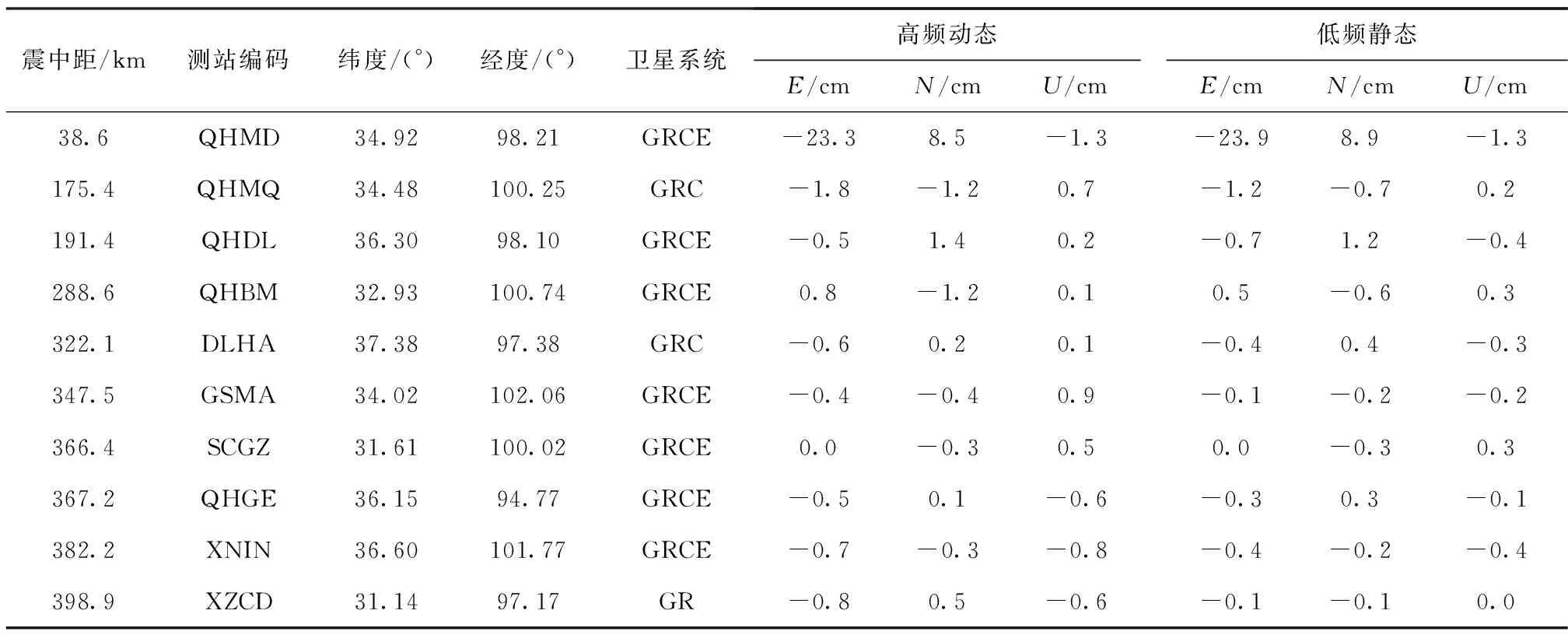
表4 基于高頻和低頻GNSS觀測(cè)的地表形變Tab.4 The surface deformation from 1 s and 30 s sampling GNSS observation data
由圖8可見(jiàn),當(dāng)瑪多地震發(fā)生后,10個(gè)陸態(tài)網(wǎng)絡(luò)基準(zhǔn)站在不同時(shí)刻均發(fā)生不同程度的波動(dòng),且開(kāi)始波動(dòng)時(shí)刻隨基準(zhǔn)站震中距的增大而延遲,影響區(qū)域可達(dá)距震中約400 km。其中,距震中約39 km的陸態(tài)網(wǎng)絡(luò)GNSS基準(zhǔn)站QHMD最先感知到地震波,受瑪多地震的影響也最大,其位置在東西向和南北向均發(fā)生不可逆的永久性位移,東西向?yàn)?3.3 cm,南北向?yàn)?.5 cm。不同于東西方向上的動(dòng)態(tài)位移特征,QHMQ和GSMA相對(duì)于其他基準(zhǔn)站在南北向受到瑪多地震的影響最為顯著,其震時(shí)最大動(dòng)態(tài)位移分別約為23.5 cm和15.6 cm,說(shuō)明地震對(duì)震源周圍站點(diǎn)的影響不僅和震中距有關(guān),與其方位角也有一定的相關(guān)性[24]。然而,瑪多地震在垂直方向上對(duì)震源周邊基準(zhǔn)站的影響相對(duì)較弱,10個(gè)基準(zhǔn)站均未出現(xiàn)顯著的位移形變。從表4可以得出,受益于GNSS多系統(tǒng)融合具有更為穩(wěn)健的定位精度,其實(shí)時(shí)PPP高頻動(dòng)態(tài)解能夠有效地獲取地震發(fā)生階段各測(cè)站在水平方向上較為準(zhǔn)確的地表形變量,與低頻GNSS觀測(cè)的形變結(jié)果基本一致,而兩者在垂直方向上的差值最大為1.1 cm,可靠性相對(duì)較差。綜上所述,基于多模GNSS實(shí)時(shí)衛(wèi)星鐘差的PPP高頻動(dòng)態(tài)解可以有效地揭示瑪多地震的震時(shí)地表形變特征。
4 結(jié)論
本文采用MGEX中60個(gè)連續(xù)跟蹤站的1 Hz觀測(cè)數(shù)據(jù),基于序貫最小二乘算法,實(shí)現(xiàn)了多模GNSS衛(wèi)星鐘差的實(shí)時(shí)估計(jì),并將其用于GNSS多系統(tǒng)組合的高頻動(dòng)態(tài)PPP,具體分析了2021年云南漾濞Mw6.4地震和瑪多Mw7.4地震的震時(shí)地表形變特征,得到以下結(jié)論:
1)自主估計(jì)的GPS、GLONASS、Galileo、BDS GEO、BDS IGSO和BDS MEO實(shí)時(shí)衛(wèi)星鐘差STD均值分別為0.064、0.163、0.058、0.232、0.154和0.179 ns,整體上稍優(yōu)于CNES實(shí)時(shí)播發(fā)的衛(wèi)星鐘差產(chǎn)品。
2)基于實(shí)時(shí)估計(jì)衛(wèi)星鐘差的GNSS多系統(tǒng)組合動(dòng)態(tài)PPP在E、N、U三個(gè)方向上的平均標(biāo)準(zhǔn)差分別為0.4、0.3、1.0 cm,相對(duì)于GPS單系統(tǒng)的定位結(jié)果分別提升了33%、25%和50%,能夠提供波形更為穩(wěn)定的動(dòng)態(tài)位移時(shí)間序列。
3)GNSS多系統(tǒng)融合的實(shí)時(shí)PPP高頻動(dòng)態(tài)解能夠快速有效地獲取地震發(fā)生階段站點(diǎn)的形變特征,為斷層運(yùn)動(dòng)特征的初步判定以及地震矩震級(jí)的快速確定提供較高可靠性的信息。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32