基于無人機遙感的小麥無人駕駛系統作業質量評估*
2023-07-11 00:23:16孫夢遙胡冰冰陳華陳玉梅吳才聰徐嵐俊
中國農機化學報 2023年6期
孫夢遙,胡冰冰,陳華,陳玉梅,吳才聰,徐嵐俊
(1.北京市農業機械試驗鑒定推廣站,北京市,100079;2.昆侖北斗智能科技有限責任公司,北京市,102200;3.中國農業大學,北京市,100083)
0 引言
以農機輔助駕駛系統[1]、農機無人駕駛系統[2-4]等為代表的智能農機近年來發展迅速,智能農機可延長作業時間、提高土地利用率、降低勞動強度、提高農業生產效率和輔助相關管理部門決策[5-6]。當前,智能農機已應用于農業生產的耕整地、播種、田間管理和收獲全環節,但對基于智能農機作業的小麥與人工駕駛作業的小麥在出苗率及長勢方面的差異研究較少。
農作物出苗率和長勢[7]研究對于維持國計民生、保障糧食安全及糧食市場宏觀調控等方面,具有重要的理論價值與現實意義[8]。傳統的小麥出苗率和長勢監測大多依靠現場調查、人工采樣和生化分析等手段進行,監測效率低、監測范圍有限,還需要投入大量的人力物力,且存在一定的破壞性。自20世紀70年代遙感技術在資源環境領域應用的興起,衛星遙感監測[9-11]方法已成為農業監測與評估的有利手段。隨著遙感技術的發展,小麥出苗率和長勢監測逐漸向智能化、系統化方向發展,空天地遙感平臺被廣泛應用于小麥出苗率和長勢監測中,但各類平臺仍存在一定的局限性[12],或受環境影響較大,或不能即時的反映小麥的生長情況,無法對小麥出苗率和長勢進行全面、綜合的評價。為此,引進了無人機影像技術、遙感技術和傳感器技術[13-14],無人機遙感手段既能滿足高分辨率要求,且可在花費較少野外工作量的情況下,獲取較大范圍的即時、無損、可靠的農作物生長信息[15],利用無人機獲取小麥出苗期和返青期的真彩色和多光譜數據,計算相應指數,基于小麥出苗率的指數模型、長勢模型,計算小麥出苗率和長勢,準確掌握小麥出苗率、長勢,為后期預測小麥產量提供科學依據。
本文以小麥為研究對象,利用無人機獲取農機無人駕駛系統作業、農機輔助駕駛系統作業、人工駕駛作業3個區域的真彩色影像和多光譜影像,分別計算不同作業模式下小麥的出苗率和長勢指數。以期為智能農機在小麥播種作業中的優勢與價值提供參考。
1 材料與方法
1.1 研究區概況
研究區(圖1)位于北京市密云區北單家莊,地理坐標為40°20′35″~40°21′00″N,116°51′15″~116°51′40″E,屬于暖溫帶季風型大陸性半濕潤半干旱氣候,四季分明,干濕冷暖變化明顯,年平均氣溫為10.8 ℃。

圖1 研究區不同作業模式邊界劃定示意圖Fig.1 Schematic diagram of the demarcation of boundaries between different operating modes in the study area
種植方式以小麥與玉米輪作為主,冬小麥通常在9月份種植,次年6月份收獲。該研究區麥田總面積20.47 hm2,中央區域9.2 hm2范圍為重點實驗區,包括無人駕駛系統作業面積2.93 hm2、輔助駕駛系統作業面積2.4 hm2、人工駕駛作業面積3.87 hm2。
1.2 數據獲取與預處理
1.2.1 無人機影像獲取與預處理
2021年11月20日(出苗期)和2022年4月25日(返青期),分別進行了小麥出苗率和小麥長勢數據采集。無人機平臺采用大疆經緯系列M300無人機,搭載禪思P1可見光鏡頭,包括藍綠紅3個波段,主要采集冬小麥真彩色影像;大疆精靈4多光譜版無人機,包括藍綠紅、紅邊、近紅外5個波段,主要采集冬小麥多光譜影像。無人機及傳感器主要參數如表1~表3所示。無人機參數設置應綜合考慮研究目的、測區情況及無人機自身性能。航向重疊度與旁向重疊度越高,影像拼接效果越好,但高度重疊會造成影像數據量大、拼接費時、電腦硬件要求高等問題。

表1 M300無人機主要參數表Tab.1 M300 UAV main parameters table

表2 精靈4多光譜版無人機主要參數表Tab.2 Genie 4 multispectral version of the drone main parameters table
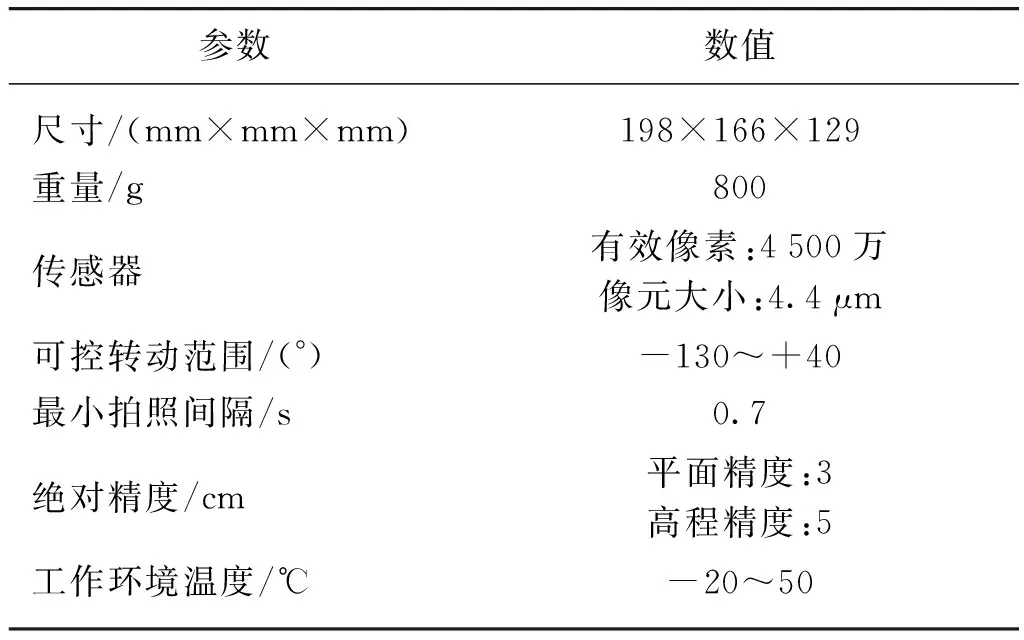
表3 禪思P1相機主要參數表Tab.3 Zenmuse P1 camera main parameter table
本研究設計航向80%、旁向70%的重疊率,其中出苗期無人機飛行高度為80 m,返青期無人機飛行高度為100 m。由于飛行速度過快易造成地物影像模糊,本研究設定無人機航速為10 m/s,傳感器鏡頭垂直向下,拼接影像涵蓋整個研究區。研究區為大面積冬小麥種植區,區內典型地物相對較少,為方便后期影像幾何校正處理,于測區內均勻布設10個航測標志點,作為典型參考點。航拍前均在地面放置一塊校準反射面板,每個架次起飛前,手動控制飛機懸停于校正板上方2.5 m處拍照,獲得當時條件下標準反射率值。
獲取無人機影像后,采用大疆智圖軟件進行拼接,在影像處理過程中利用飛行前獲得的校準反射面板數據校正所有航拍影像。
使用ENVI 5.3軟件,以研究區數碼正射影像為參考影像,全區均勻選取30個參考點(包括10個航測標志點)對多光譜影像進行幾何校正,檢驗圖像幾何糾正誤差小于2個像元。根據地面實測數據點在影像上的位置,構建樣本點的感興趣區域(Region of Interest,ROI),以ROI范圍內平均反射率光譜值作為該點的冬小麥反射率光譜,以此得到各樣點反射率光譜數據。
1.2.2 小麥出苗率實測數據獲取
實地采集數據過程中,確定樣方,記錄樣方內一壟已露出土壤的出苗小麥粒數;為增強樣本數據代表性,記錄采集樣方所在耕作區域5 m長度內所包含的壟數,作為所選樣方內小麥種植壟數。基于空間定位技術,將實地采集的麥苗數據進行空間化。本次實測數據采集共設計樣方45個,規格統一為1 m×1 m。其中,人工駕駛區分布樣方18個,輔助駕駛區分布樣方13個,無人駕駛區分布樣方14個。空間化過程中為每一個樣方分配唯一編號,樣方分布與ID號如圖2所示。
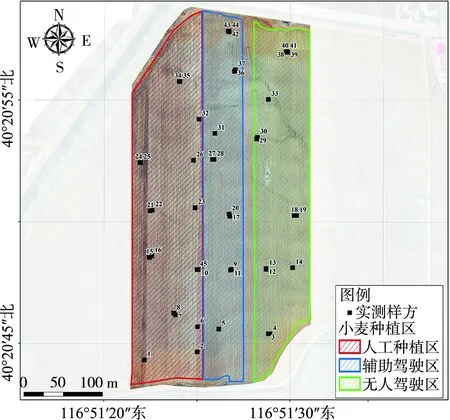
圖2 小麥田實測樣方與樣方ID號示意圖Fig.2 Schematic diagram of the measured sample square and the sample square ID number of the wheat field
1.2.3 小麥長勢實測數據獲取
通過沿著農田邊界隨機進行數據采樣,共采集樣本點61個,如圖3所示。

圖3 踏田巡查路線與拍照點分布示意圖Fig.3 Schematic diagram of the distribution of the patrol route and the photo points in the field
1.3 出苗率計算
1.3.1 麥苗識別與提取
麥苗識別與提取工作以人工判讀基礎,在航拍監測區域范圍內拾取麥苗特征點;基于確定的特征點,利用超綠值(ExG)[16-17]和最大類間差法相結合的方法將麥苗從農田背景中提取出來(圖4)。超綠色提取綠色植物圖像效果較好,陰影、枯 草和土壤圖像等均能較明顯的被抑制,植物圖像更為突出,對于作物識別或雜草的識別最常用的灰度化方法為超綠色法:ExG=2G-R-B為將植物和背景分割需先確定一個閾值,然后將每個像素點的灰度值和閾值相比較,根據比較的 結果將該像素劃分為植物或者背景。最大類間方差法(Ostu 法)利用目標區域與背景區域之間的方差最大的思想,達到分割圖像的目的。選取最佳閾值時,目標與背景之間的方差值最大,小于閾值的區域為背景區域,大于閾值的區域為目標區域,即可將需要的區域區分開來。
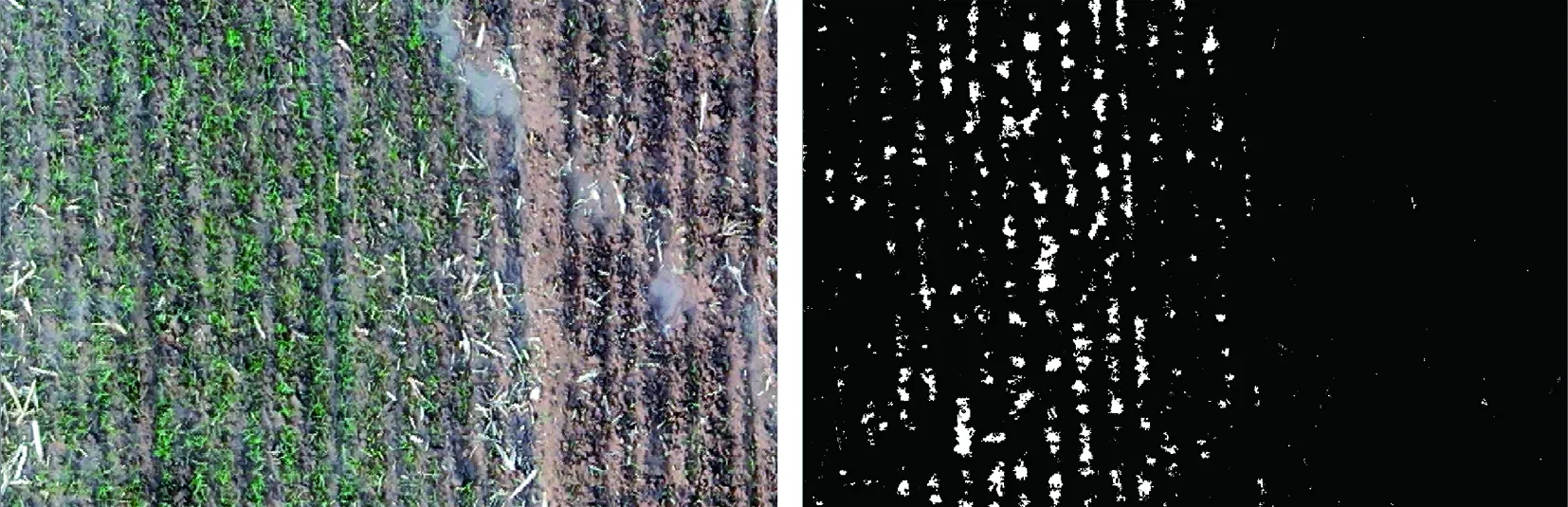
圖4 麥苗識別與提取Fig.4 Seedling identification and extraction
1.3.2 植被指數計算
在用于精準農業的各種植被指數中,歸一化植被指數(NDVI)[18-19]是應用最為廣泛的一種。NDVI通過測量近紅外(植被強烈反射)和紅光(植被吸收)之間的差異來量化植被,有助于了解植物如何生長和發育。
(1)
式中:BandNIR——地物在近紅外波段的反射率;
BandR——地物在紅光波段的反射率。
負值主要是因水體信息產生,接近零的值則主要由于巖石和裸土而產生,正值表示有植被覆蓋,且隨覆蓋度增大而增大。
監測區小麥田NDVI示意圖如圖5所示。
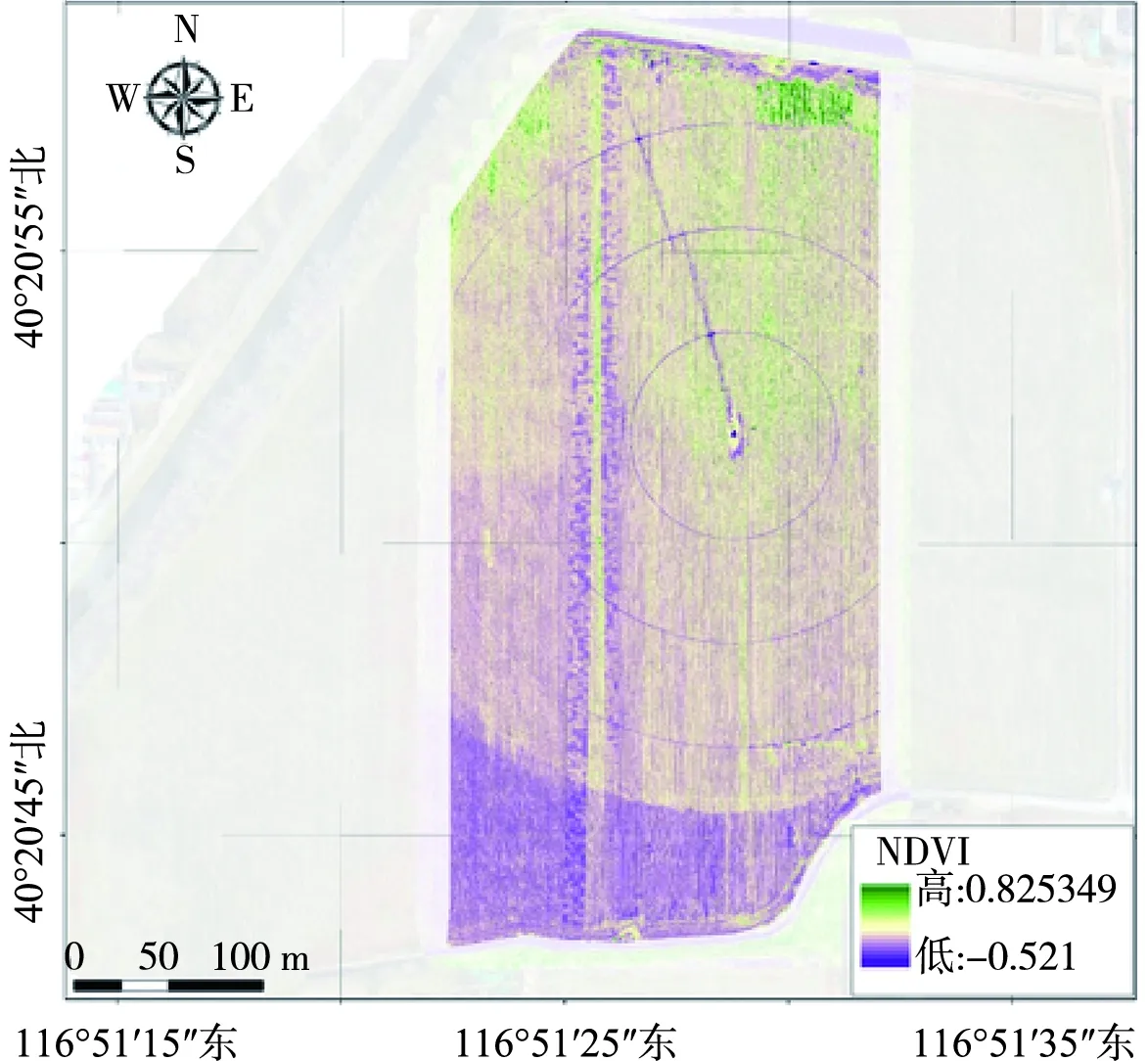
圖5 監測區小麥田NDVI示意圖Fig.5 Schematic diagram of wheat field NDVI in monitoring area
1.3.3 實測出苗率計算
目前已收集到的數據內容包括:3個種植區域的播種時間都是10月20日,小麥播種密度450 kg/hm2,施肥無差別。小麥品種統一是農大5181,千粒重0.043 kg,正常出苗率91%;上述內容結合實測數據,計算每個樣方的粒數和出苗率。對于每個樣方的播種粒數,整個區域播種均勻,每個樣方內所播種的麥粒數均相同,結果如表4所示。
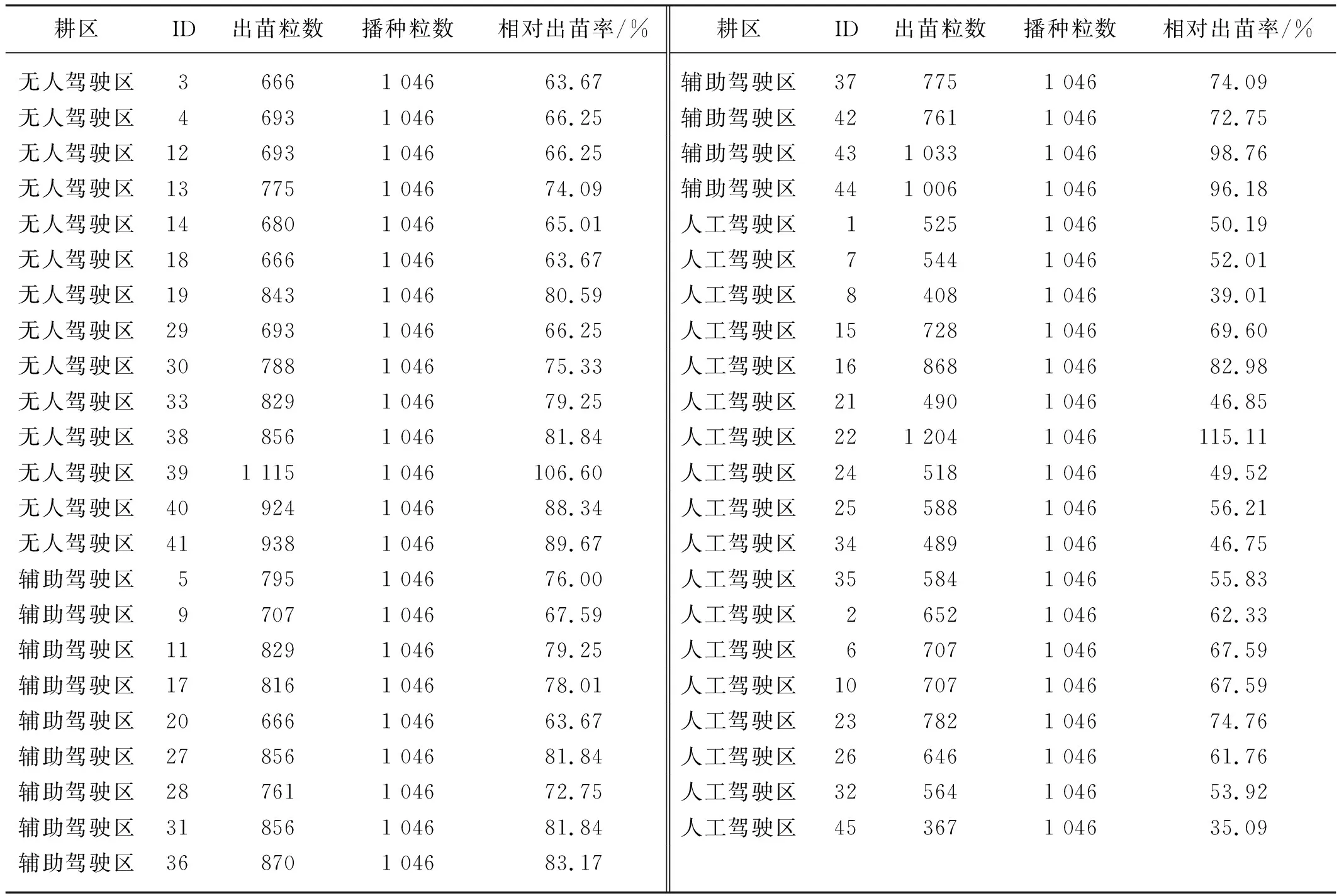
表4 樣方小麥出苗率統計表Tab.4 Statistical table of seedling emergence rate of square wheat
1.3.4 區域出苗率計算
基于實測計算的出苗率與區域NDVI建立對應關系,利用逐步多元線性回歸(SMLR)建立麥苗估測模型,并利用空間分析技術,求取區域出苗率(圖6)。

圖6 無人機小麥密集度空間分布示意圖Fig.6 Spatial distribution of wheat density in UAVs
1.4 長勢指數計算
1.4.1 基礎指數計算
本次基于P4M無人機獲取的多光譜數據,計算麥田區域的歸一化植被指數(NDVI)、歸一化差異紅色邊緣指數(NDRE)、優化型土壤調節植被指數(OSAVI)、葉面葉綠素指數(LCI)和歸一化差值植被指數(GNDVI),五種指數綜合構建冬小麥長勢指數,基于長勢指數空間分異性統計不同區域長勢狀況。
1) 歸一化差異紅色邊緣指數(NDRE)。本次實地調查過程中發現,不同區域小麥長勢有明顯差異,東側長勢較為旺盛。而NDVI指數在植被長勢旺盛的區域靈敏度較低,會出現飽和現象。因此,本次研究加入NDRE指數。該指數使用紅邊波段代替紅光波段,能夠在高植被區域更靈敏的反映植被的葉綠素含量,公式如式(2)所示。
(2)
式中:BandNIR——近紅外波段反射率;
BandRE——紅邊波段反射率。
2) 優化型土壤調節植被指數(OSAVI)。NDVI指數僅考慮了植被因素,而OSAVI則將土壤因素納入考量。在植被生長初期、密度不高的時候,可以更好地排除土壤影響、反映植被的葉綠素含量。因此對于本次研究,小麥返青期相對較為稀疏時,OSAVI能夠更為全面得對小麥長勢進行診斷。公式如式(3)所示。
(3)
式中:BandR——紅光波段反射率。
3) 葉面葉綠素指數(LCI)。LCI在判斷綠色植被的葉綠素和含氮量方面具有較好的效果,在植被長勢監測中應用也較為廣泛。公式如式(4)所示。
(4)
4) 歸一化差值植被指數(GNDVI)。GDNVI相對于NDVI有較高的穩定性,也經常用于植被覆蓋監測、植被和作物健康度調查中。本次監測也將該指數納入模型中。公式如式(5)所示。
(5)
式中:BandG——綠光反射率。
1.4.2 小麥長勢指數計算
本文針對小麥長勢監測,將上述5個植被指數進行綜合,形成一個新的指標,即長勢指數。具體方法是首先對單獨指標進行歸一化,根據本研究所選用的植被指數值域特征,歸一化計算采用如式(6)所示。
(6)
式中:Xi——第i個指數的像元值;
Xmax——第i個指標在該生長監測期的最大值。
對歸一化后的每個指標再分別賦予相同的權重因子,即0.2,綜合計算得到長勢指數。
2 結果與分析
2.1 小麥出苗率
基于實測數據、無人機數據,結合農作物模型,分別對人工種植區、輔助駕駛區和無人駕駛區進行小麥出苗率估算,結果如表5所示。可以看出,位于東側的無人駕駛區出苗率最高,達到79.56%;輔助駕駛區出苗率次之,為78.91%;西側的人工駕駛區出苗率最低,為60.43%。樊高瓊等[20]研究發現,小麥出苗率受播種深度的影響,所以在相同環境條件下,采用不同駕駛模式種植的小麥,無人駕駛和輔助駕駛在播種過程中,運動波動(結合橫向及縱向波動)影響較小,對于種子的落床深度差異影響較小,所以出苗率較高,而人工駕駛受人為因素影響較大,使得人工駕駛模式下小麥出苗率顯著降低。
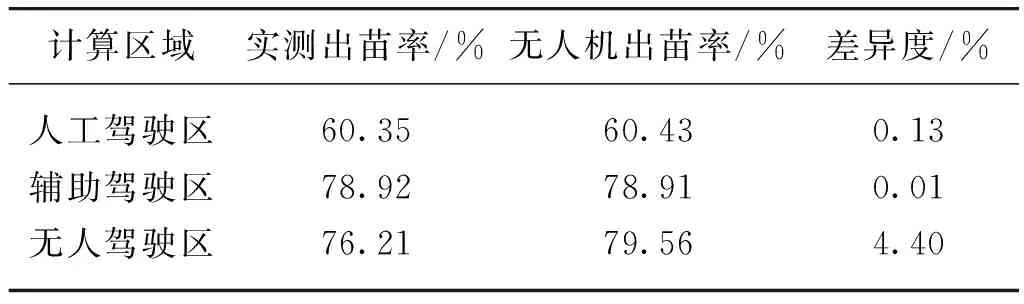
表5 不同作業模式下的小麥出苗率Tab.5 Wheat emergence rates under different operating modes
2.2 小麥長勢指數
小麥長勢指數是評價小麥長勢、預測小麥產量的重要指標[5]。從小麥長勢指數(圖7、表6)分析得知,無人駕駛區域冬小麥長勢最好為0.853,其次為輔助駕駛區為0.806,再次為人工種植區為0.757。
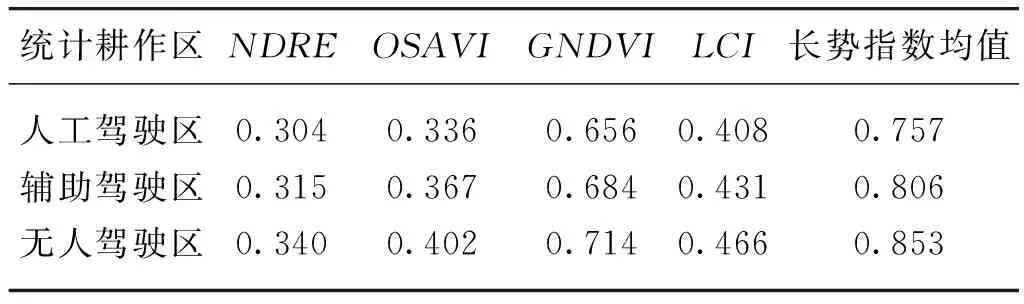
表6 不同耕作區長勢指數統計表Tab.6 Statistical table of growth potential index of different farming areas
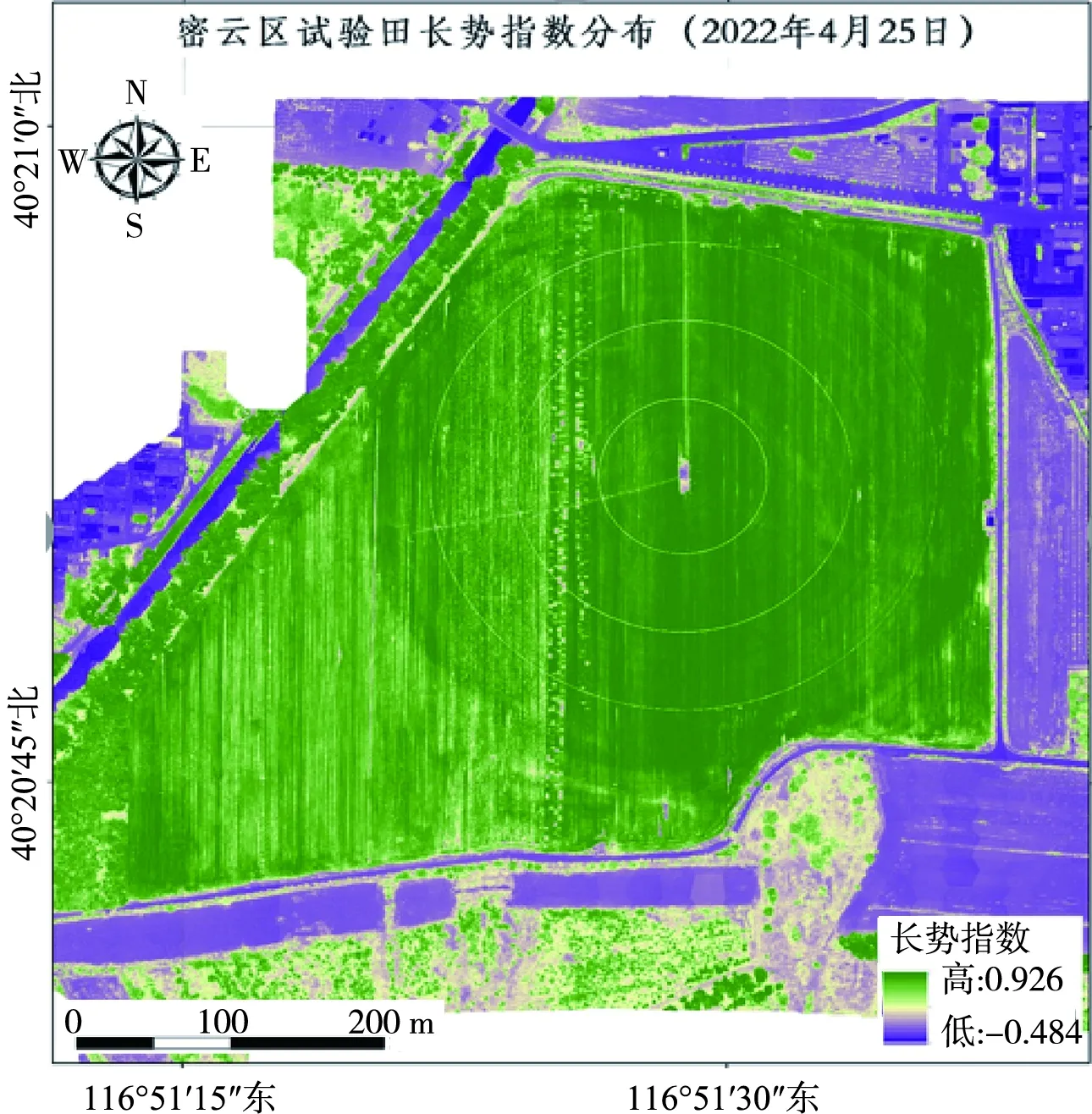
圖7 監測區冬小麥長勢指數空間分布圖Fig.7 Spatial distribution of winter wheat growth index in monitoring area
3 結論
基于無人機遙感數據和田間實測數據,結合農作物模型,實現了對研究區人工駕駛、輔助駕駛和無人駕駛等不同作業模式下小麥出苗率和長勢指數的分析。
1) 整體來看,無人駕駛區和輔助駕駛區出苗率高于人工駕駛區,無人駕駛區出苗率相對輔助駕駛區高出少許,其中,基于無人駕駛系統作業的小麥出苗率最高,為79.56%;基于輔助駕駛系統作業的小麥出苗率次之,為78.91%;基于人工駕駛作業的小麥出苗率最低,為60.43%。
2) 基于無人駕駛系統作業的小麥長勢指數最好,為0.853;基于輔助駕駛系統作業的小麥長勢次之,為0.806;基于人工駕駛作業的小麥長勢最差,為0.757。
3) 從數據獲取途徑和表達范圍來看,無人機遙感數據更能全面、客觀地反映出整體區域的狀況。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
