基于雙率融合的水下化學藥劑注入計量閥的流量計量方法
2023-08-01 17:56:01孫欽安維崢吳露左信徐世江岳元龍
化工自動化及儀表 2023年2期
孫欽 安維崢 吳露 左信 徐世江 岳元龍
摘 要 為了提高水下油氣田生產化學藥劑注入計量閥的可靠性,防止出現計量不準確甚至無法計量的情況,提出流量計與輔助流量計量的雙冗余計量方法,通過數據融合方式實時整合流量計和輔助流量計量流量,輸出高精度的化學藥劑流量。針對流量計和輔助流量計量的采樣速率不同且采樣速率之比為正有理數的情況,提出一種分布式狀態估計融合算法,首先建立每種計量方式的狀態空間模型;然后將兩種計量方式的觀測信息采用分布式融合結構進行融合,進而將雙率數據融合問題轉換為同速率數據融合問題;最后的仿真結果表明:基于本算法獲得的最高采樣率下的狀態估計值優于單一計量方式的狀態估計值,算法具有很好的可行性、實時性和有效性。
關鍵詞 雙冗余計量 水下生產系統 流量 數據融合 雙率 分布式狀態估計 Kalman濾波
中圖分類號 TP214? ?文獻標識碼 A? ?文章編號 1000?3932(2023)02?0175?06
水下生產系統廣泛應用于深水油氣田以及邊際油田的開發過程,具有流動性保障的需求。化學藥劑對海洋油氣資源的開采以及保障水下生產系統流動性安全起著非常重要的作用,它們主要用來提高水下生產系統相關生產設備的工作效率,同時保護生產設備和井口管線的正常運作,以及延長設備的耐用性等。水下化學藥劑注入計量閥是水下生產系統的關鍵設備,具有為水下油氣田開發提供化學藥劑注入、計量及流量控制等功能。
為了獲得準確的化學藥劑注入流量,降低單一數據源給系統帶來的風險,水下化學藥劑計量閥的流量計量通常采用流量計與輔助流量計量方法的兩級流量計量冗余設計方案,即在水下化學藥劑注入計量閥內部的化學藥劑注入沿程串聯接入流量計,然后接入調節閥,在調節閥上、下游安裝壓力變送器,通過當前調節閥閥芯位移信息和前、后壓差信息計算流經調節閥的流量,實現輔助流量計量。
隨著設備安裝使用時長的增加,流量計與各傳感器的性能逐漸下降,測量誤差和設備故障率逐漸增大,導致測量數據不準確。為了獲得高精度的流量計量數值,避免因傳感器性能問題導致的計量不準確問題,水下化學藥劑注入計量閥采用流量數據融合方法實時融合流量計測量流量與輔助流量計量計算流量,從而獲取高精度的流量計量數值。
數據融合是將多個來源的數據進行融合以獲得比單個數據源更加接近真實值的方法,目前已廣泛應用于故障診斷、目標識別及智能交通等領域[1~4]。當前對于多個數據融合的研究一般都假設各個數據源具有相同的采樣速率,但化學藥劑注入計量閥的流量計量過程存在數據獲取周期不同步的問題。一般情況下,流量計可以實時測量介質的流量,采樣速度較快,但輔助流量計量方法需要通過調節閥兩端的壓差信息和閥芯位移信息計算通過調節閥的流量,計算過程較慢,需要消耗一定的時間,因此存在流量采樣速率不一樣的問題。如何將具有不同采樣速率的流量數據進行融合成為亟待解決的問題。
目前,在多率傳感器系統的融合估計理論中,大多數學者采用兩種處理方法:一種是基于多尺度系統理論的方法,另一種是基于濾波器設計的方法。多尺度系統理論最早提出是在1989年[5,6],并且已經應用于實踐中[7]。基于濾波器設計的方法是在設計過程中融合不同采樣速率的觀測值以實現狀態估計[7~11]。針對水下化學藥劑注入計量閥的流量計量這一典型的多率系統,本研究通過將狀態和觀測值采用分布式數據融合結構,進而將雙率數據融合問題轉換為同速率的數據融合問題,并給出一種雙率融合狀態估計算法。
1 問題描述
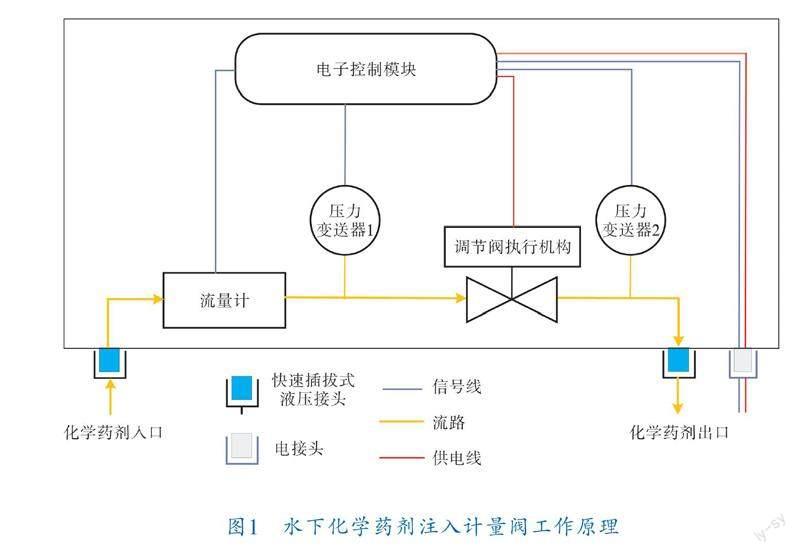
化學藥劑計量閥采用流量計與調節閥緊密串聯集成的方式將流量計量與流量調節這兩種功能集合于一體,通過使用齒輪流量計計量化學藥劑的實時流量,同時使用輔助流量計量方法計算化學藥劑流經調節閥的流量,把兩種流量計量方法對應的流量數據融合輸出高精度的流量計量值。
水下化學藥劑計量閥的工作原理如圖1所示。
流量計可以實時測得化學藥劑的流量值,但輔助流量計量算法需要通過位移傳感器檢測的閥芯位移和高精度壓力變送器測量的調節閥前、后壓差數據計算出當前流經調節閥的流體流量,計算過程需消耗一定的時間,存在兩個流量采樣周期不一樣的問題。
針對流量計和輔助流量計量的采樣速率不同步問題,本課題展開以下研究。
利用流量計和輔助流量計量方式對同一化學藥劑的注入量進行觀測,已知這兩種計量方式的觀測方程及其在最高采樣率下的狀態方程,并假設兩種計量方式之間的采樣時間呈任意整數倍關系。系統模型為:
4 仿真實例
現采用兩種計量方式對水下化學藥劑注入流量進行計量,一個是來自流量計實時計量的流量數據,另一個是根據調節閥閥芯位移信息和前后壓差信息計算流體流經調節閥的流量數據。系統描述如第1節所述,取N=2,n=1即數據源相關系統模型參數A(2,k)=1,C(i,k)=1(i=1,2)。初始條件x=10.8,p(2,0)=2。系統誤差方差Q(3)=2。
設兩種計量方式的觀測誤差方差分別為
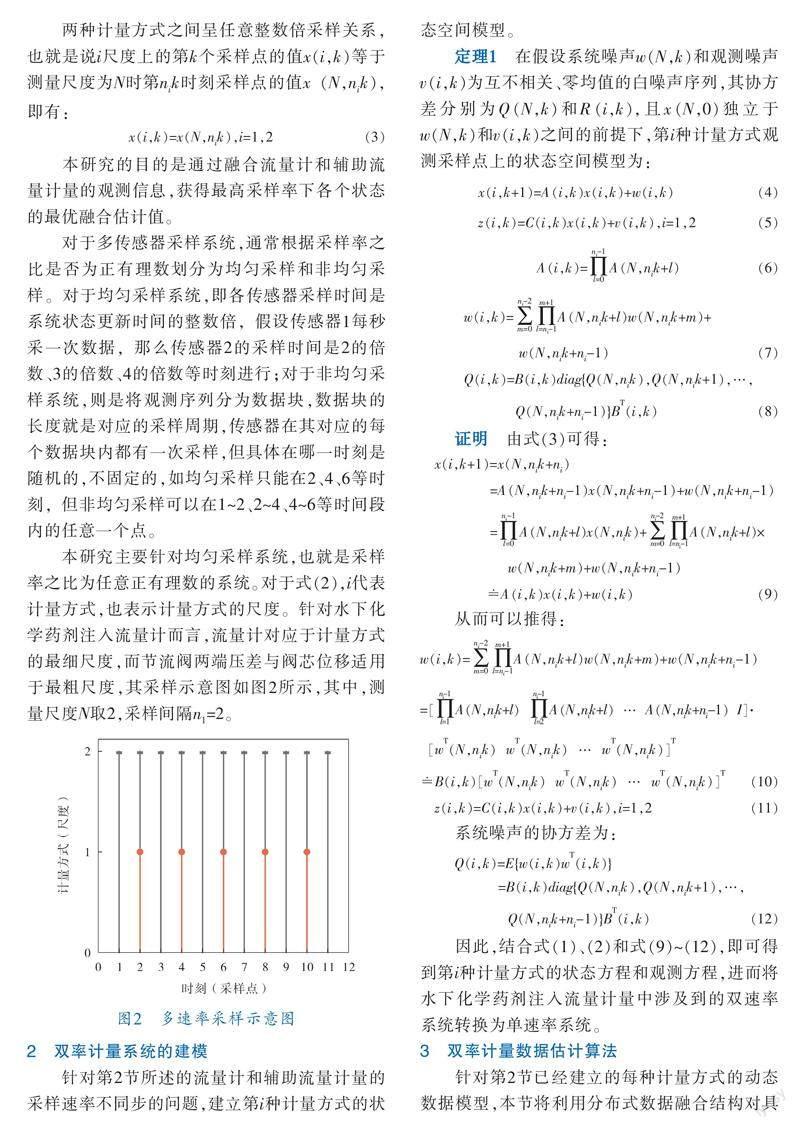
R(2)=1,R(1)=1,兩種計量方式的數據源之間的采樣速率關系如圖2所示,對流量計和輔助流量計量的流量分別采樣100、50個數據進行仿真。
圖4為流量計實時計量的流量數據仿真示意圖,采樣速率為1 s,紅色數據為流量計計量的流量值,黑色曲線代表擬合的流量變化曲線。
圖5為根據調節閥閥芯位移信息和前后壓差信息計算流體流經調節閥流量數據仿真示意圖,采樣速率為2 s,紅色數據為計算獲取的流量值,黑色曲線代表擬合的流量變化曲線。
圖6為利用筆者所述分布式融合估計算法融合結果仿真示意圖,結合圖4可以看出,兩種計量方式的融合結果相比于單種計量方式而言更加貼近真實值,紅色數據為融合輸出的流量值,黑線為擬合流量曲線。
圖7為單一流量計和融合兩種計量方式所得的狀態估計誤差的絕對值曲線,可以看出,融合兩種計量方式的估計誤差絕對值曲線與單一計量方式的誤差曲線相比更接近于零,也就是說兩種計量方式的融合結果優于單一計量方式的融合結果。
仿真結果表明,筆者提出的融合估計算法是有效的,并且提出的雙率融合算法解決了水下化學藥劑注入計量閥存在流量計量采樣速率不同步問題。
5 結束語
本課題研究了流量計和輔助流量計量兩種方法采樣速率不同步的數據融合問題,在速率之比為正有理數的前提下,提出一種分布式狀態融合估計算法,即雙率估計融合算法。通過將雙率估計融合算法應用到水下化學藥劑注入計量閥的流量計量中,解決了流量計采樣速率不同步問題。仿真實驗表明:融合兩種計量方式獲得的最高采樣率下的狀態估計值優于單一計量方式的狀態估計值,提高了水下化學藥劑注入流量計量的精確性與可靠性。
參 考 文 獻
[1] LI X R,JILKOV V P.Survey of maneuvering target tracking.Part I.Dynamic models[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1333-1364.
[2] BAR?SHALOM Y,LI X R,KIRUBARAJAN T.Estimation with applications to tracking and navigation:theory algorithms and software[M].New York:John Wiley & Sons,2004.
[3]? ?MARTINEZ S,BULLO F.Optimal sensor placement and motion coordination for target tracking[J].Automatica,2006,42(4):661-668.
[4]? ?潘泉,梁彥,楊峰,等.現代目標跟蹤與信息融合[M].北京:國防工業出版社,2009.
[5]? ?CHOU K C,WILLSKY A S,BENVENISTE A,et al.Recursive and iterative estimation algorithms for multiresolution stochastic processes[C]//IEEE Confer?ence on Decision & Control.Pricataway NJ:IEEE,1989:1184-1189.
[6] HONG L.Multi?resolutional filtering using wavelet transform[J].IEEE Transactions on Aerospace and Electronic Systems,1993,29(4):1244-1251.
[7]? ?HUANG K,WU S,LI Y,et al.A multi?rate sampling data fusion method for fault diagnosis and its industrial applications[J].Journal of Process Control,2021,104(1):54-61.
[8]? ?CHEN B S,LIN C W.Optimal signal reconstruction in noisy filter bank systems:multirate Kalman synthesis filtering approach[J].IEEE Transactions on Signal Processing,1995,43(11):2496-2504.
[9]? ?ANDRISANI D,GAU C F.Estimation using a multirate filter[J].IEEE Transactions on Automatic Control,1987,32(7):653-656.
[10]? ?LEE D J,TOMIZUKA M.Multirate optimal state esti?mation with sensor fusion[C]//Proceeding of the 2003 American Control Conference.Pricataway NJ:IEEE,2003:2887-2892.
[11]? ?鄧志紅, 閆莉萍, 付夢印.基于不完全觀測數據的多速率多傳感器數據融合[J].系統工程與電子技術,2010,32(5):886-890.
(收稿日期:2022-08-02,修回日期:2022-12-16)
Flow Measurement Method for Underwater Chemical InjectionBased on Dual?rate Fusion
SUN Qin1, AN Wei?zheng1, WU Lu1, ZUO Xin2, XU Shi?jiang2, YUE Yuan?long2
(1. CNOOC Institute Co., Ltd.; 2. College of Information Science and Engineering,
China University of Petroleum (Beijing) )
Abstract? ?For purpose of improving reliability of the metering valve in subsea chemical injection and preventing both inaccuracy and unmeasurable operation there, a dual redundant metering method was proposed, which has the flowmeter and auxiliary flow metering flow integrated at real time through data fusion to output high?accuracy chemical flow; meanwhile, a distributed state estimation fusion algorithm was proposed, in which, having the state space model of each metering method established and the observations of the two metering methods fused with a distributed fusion structure, as well as the dual?rate data fusion problem converted into a same?rate data fusion problem. Simulation results show that, the state estimates obtained based on this algorithm at the highest sampling rate outperforms that with a single measurement and this algorithm has better feasibility, real?time performance and validity.
Key words? ?dual redundant metering, underwater production system, flow, data fusion, dual rate, distributed state estimation, Kalman filtering
作者簡介:孫欽(1975-),高級工程師,從事水下生產控制系統的設計與通信研究。
通訊作者:岳元龍(1984-),副教授,高級工程師,從事數據融合、控制系統可靠性理論研究,yueyuanlong@cup.edu.cn。
引用本文:孫欽,安維崢,吳露,等.基于雙率融合的水下化學藥劑注入計量閥的流量計量方法[J].化工自動化及儀表,2023,50(2):175-180.