基于有偏卡爾曼的雙冗余熱電阻數據濾波方法
2023-08-01 17:56:01徐正海左信吳露陳亞男岳元龍
化工自動化及儀表 2023年2期
徐正海 左信 吳露 陳亞男 岳元龍

摘 要 針對水下生產控制系統溫度測量系統中單個傳感器易受水下復雜環境影響,出現溫漂、測量精度低等問題,設計了一種雙冗余溫度測量傳感器(采用兩個熱敏元件進行溫度測量)。利用基于有偏卡爾曼的擴維融合方法進行數據處理,提高傳感器融合測量精度。定義一個相似矩陣,用于在融合之前剔除故障傳感器的測量數據,進一步提高測量結果的可靠性。實驗結果表明:雙冗余溫度測量傳感器具有精度高、抗干擾性能強的優點。
關鍵詞 溫度測量 雙冗余 傳感器 有偏卡爾曼 數據融合 擴維
中圖分類號 TH811? ?文獻標識碼 A? ?文章編號 1000?3932(2023)02?0188?06
在深海油氣田以及邊際油田的開發過程中,水下生產控制系統占據著十分重要的地位[1~3]。水下生產控制系統主要通過監測海洋油氣田開發過程中的儀表參數控制閥門的開啟和關閉,以及為油氣開發提供動力和通信設備。水下生產控制系統包括監測和控制兩個主要功能,其中儀表參數的監測是閥門控制調節的重要依據。溫度數據就是儀表重要的監測數據之一[4],操作人員根據溫度判斷水下生產狀況,發出控制指令,確保油氣生產的正常進行,避免事故發生或在事故發生時能夠及時被發現,進而減少損失、降低事故影響。
傳統水下控制系統中的溫度傳感器中只設有一個熱敏元件,測量系統基本都不具備冗余測量功能,在海底復雜環境下易受環境影響出現溫漂等問題,無法保證測量過程的可靠性。而溫度測量系統作用于整個油氣開采過程,使用周期較長、不易維修,這就需要它具備較高的可靠性。在此背景下,本團隊提出并設計一種雙冗余熱敏電阻溫度傳感器,相比于單熱敏元件傳感器,可以具有更高的測量可靠性和準確性。
在雙冗余熱電阻溫度傳感器中,多個熱敏元件測量數據的處理就顯得尤為關鍵。目前,處理測量數據使用較多的方法是平均值法[5]、加權平均值法[6]和卡爾曼濾波法[7],這些方法本質上和最小二乘估計[8]特例是等價的,只能在無偏情況下取得最小均方誤差。但是,當測量數據不穩定時,利用這些數據處理方法得到的測量結果的均方誤差將大幅增加。
有偏卡爾曼濾波(Biased Kalman Filter,BKF)能進一步降低融合測量的均方誤差,提高融合測量結果的精度[9]。此外,當其中一個傳感器出現故障或者受環境影響,測量數據出現較大波動時,將會導致最終的融合測量結果的均方誤差較大,在將兩個熱敏元件的測量數據進行融合之前,需要判斷測量數據是否出現較大波動,從而將波動較大的測量數據剔除。為此,筆者提出一種基于相似矩陣的判別方法,對測量預測和兩個傳感器的相似度分別進行計算,將計算結果作為判斷是否剔除某個熱敏元件測量數據的依據,從而提高最終融合測量結果的精度。
1 雙冗余溫度傳感器的設計
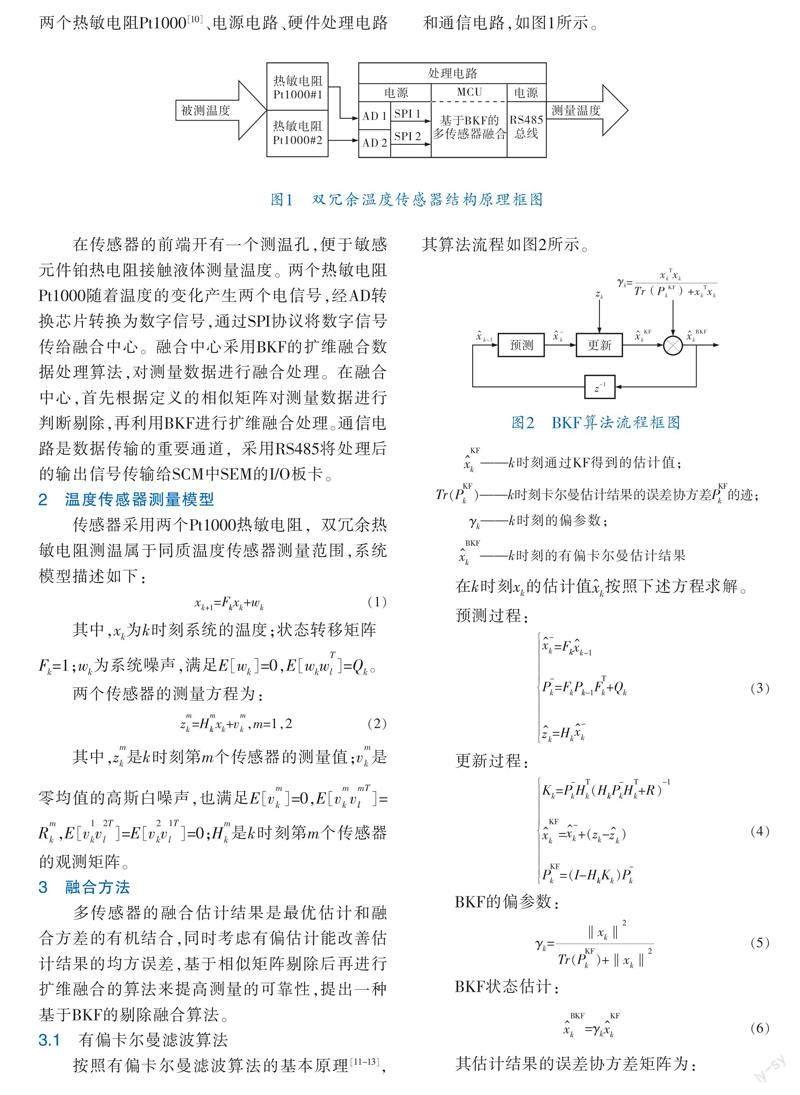
雙冗余溫度傳感器是一種將溫度變量轉換為可傳送的標準化輸出信號的儀表,其內部含有兩個熱敏電阻Pt1000[10]、電源電路、硬件處理電路和通信電路,如圖1所示。
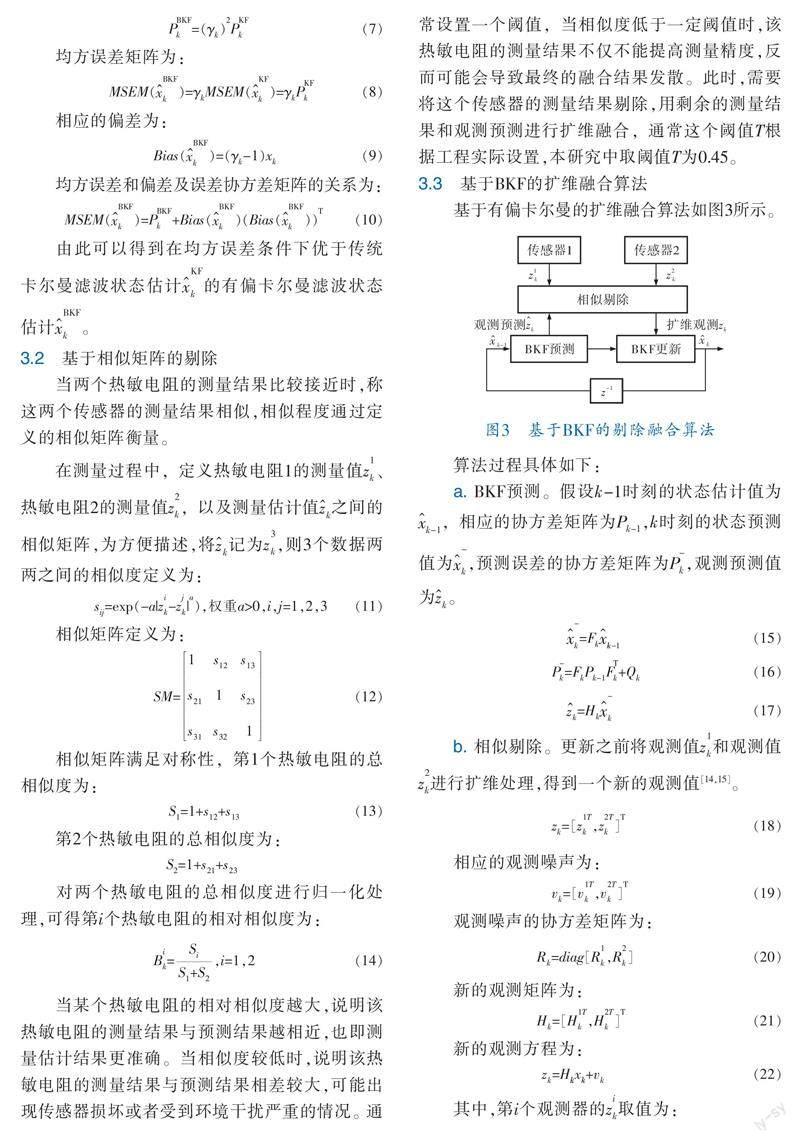
在傳感器的前端開有一個測溫孔,便于敏感元件鉑熱電阻接觸液體測量溫度。兩個熱敏電阻Pt1000隨著溫度的變化產生兩個電信號,經AD轉換芯片轉換為數字信號,通過SPI協議將數字信號傳給融合中心。融合中心采用BKF的擴維融合數據處理算法,對測量數據進行融合處理。在融合中心,首先根據定義的相似矩陣對測量數據進行判斷剔除,再利用BKF進行擴維融合處理。通信電路是數據傳輸的重要通道,采用RS485將處理后的輸出信號傳輸給SCM中SEM的I/O板卡。
2 溫度傳感器測量模型
傳感器采用兩個Pt1000熱敏電阻,雙冗余熱敏電阻測溫屬于同質溫度傳感器測量范圍,系統模型描述如下:
從圖5可以看出,對于均方誤差,BKF擴維融合優于KF擴維融合,進一步說明了BKF擴維融合的精度高于KF擴維融合。
第2種情況,用BKF進行擴維融合,在50
從圖6、7可以看出,當傳感器出現故障時,如果不進行故障傳感器的剔除,融合結果的均方誤差會迅速變大,與無剔除的融合結果相比,本課題提出的有剔除融合算法能夠進一步抑制均方誤差變大,也即比無剔除故障傳感器測量數據直接進行融合的結果更精確。
5 結束語
筆者設計的雙冗余溫度傳感器,利用基于有偏卡爾曼的數據融合方法,進一步降低了融合測量結果的均方誤差,有效提高了融合測量結果的精度。并且當傳感器內部某個熱敏元件出現故障或者受環境影響較大時,利用相似矩陣將其剔除,具有一定的抗干擾性能。對于實時、準確獲取水下生產系統關鍵部位的溫度,保障水下采油系統安全穩定運行具有重要意義。
參 考 文 獻
[1] 劉超,劉傳巖,劉健,等.水下油氣生產系統概述及其發展現狀[J].石油工程建設,2021,47(6):29-34.
[2] 俞華,孫恪成,鄧欣,等.渤海水下油氣生產控制系統適應性分析[J].機電工程技術,2021,50(5):60-63;137.
[3] 李志剛,賈鵬,王洪海,等.水下生產系統發展現狀和研究熱點[J].哈爾濱工程大學學報,2019,40(5):944-952.
[4] 左信,岳元龍,段英堯,等.水下生產控制系統綜述[J].海洋工程裝備與技術,2016(1):58-66.
[5]? ?BAO L,JRGENSEN S B.Soft sensor design by multi?variate fusion of image features and process measure?ments[J].Journal of Process Control,2011,21(4):547-553.
[6] 宋海華,王秀麗,李紅海.精餾塔板上氣液相界面積的測量與預測[J].化工學報,2003,54(8):1112-1117.
[7] 蔡連博,許文兵,曲俊生,等.深水鋪管起重船多傳感器數據融合技術研究[J].中國造船,2014,55(3):202-209.
[8] 李振春,李闖,黃建平,等.基于先驗模型約束的最小二乘逆時偏移方法[J].石油地球物理勘探,2016,51(4):738-744;5.
[9] BEN?HAIM Z,ELDAR Y C.Blind Minimax Estimation[J].IEEE Transactions on Information Theory,2007,53(9):3145-3157.
[10]? ?趙金標,朱慶生,周小軍,等.基于Pt1000的濾光器測溫系統設計[J].傳感器與微系統,2017,36(6):73-76.
[11]? ?TAN J J,LI D,ZHANG J Q,et al.Biased Kalman filter[C]//2011 Fifth International Conference on Sensing Technology.Chengdu,2011:581-584.
[12] 李永明,歸慶明,顧勇為,等.有偏卡爾曼濾波及其算法[J].武漢大學學報(信息科學版),2016,41(7):946-951.
[13] 嚴春滿,吳松倫,董俊松.自適應漸消有偏擴展卡爾曼濾波在目標跟蹤中的應用[J].傳感技術學報,2020,33(2):315-320.
[14] GAO J B,HARRIS C J.Some remarks on Kalman filters for the multisensor fusion[J].Information Fusion,2001,3(3):191-201.
[15] 馬麗麗,張曼,陳金廣.多傳感器集中式增量卡爾曼濾波融合算法[J].計算機工程與應用,2014,50(11):229-232;255.
(收稿日期:2022-07-25)
Data Filtering Method of Double Redundant Heat ResistanceBased on Biased Kalman Filter
XU Zheng?hai1, ZUO Xin2, WU Lu1, CHEN Ya?nan2, YUE Yuan?long2
(1. CNOOC Research Institute Co., Ltd.;2. College of Information Science and Engineering,China University of Petroleum (Beijing))
Abstract? ?Considering the single sensors temperature drift and low accuracy caused by the underwater complex environment where the underwater production control system works, a dual redundant temperature sensor( with two thermosensitive elements) was designed. Through making use of biased Kalman?based extended dimension fusion method, the data processing was carried out to improve accuracy of sensor fusion measurement. In addition, a similarity matrix was defined to eliminate measurement data of faulty sensors before the fusion and to further improve reliability of the measurement results. Experimental results show that, this sensor has high accuracy and strong anti?interference performance for temperature measurement.
Key words? ?temperature measurement, double redundant, sensor, biased Kalman, data fusion, extended dimension
作者簡介:徐正海(1967-),教授級高級工程師,從事海洋石油天然氣開發工程研發與設計工作。
通訊作者:岳元龍(1984-),副教授,高級工程師,從事數據融合、控制系統可靠性理論研究,yueyuanlong@cup.edu.cn。
引用本文:徐正海,左信,吳露,等.基于有偏卡爾曼的雙冗余熱電阻數據濾波方法[J].化工自動化及儀表,2023,50(2):188-193.