仿生機器魚胸尾鰭聯動水動力學性能分析
2023-08-04 05:44:56高鑫馳祁靖媛陳定方
起重運輸機械 2023年13期
關鍵詞:實驗
高鑫馳 梅 杰 祁靖媛 李 波 陳定方
武漢理工大學交通與物流工程學院 武漢 430063
0 引言
人類對于海洋資源探索自古以來從未停止,水下航行器是目前水下探索較為有效的手段之一[1,2]。采用胸尾鰭推進的水下航行器,由于其運動方式以及外形輪廓與魚類相近,又被稱作仿生機器魚[3]。
與螺旋槳推進方式相比,胸尾鰭聯動推進方式具有能量利用率高、噪聲小、隱蔽性強的特點[4],近年來被給予越來越多的關注[5]。魏倩蕓[6]以箱鲀機器魚為研究對象,使用CFD 仿真軟件,研究胸尾鰭擺動頻率、幅度以及相位差對于魚體水動力學性能的影響;Shen Y等[7]設計了一款三自由度胸鰭的機器魚,可實現拍打前進、浮潛、轉彎,胸鰭在接近10°的仰角處于穩態,順槳運動可將凈推力提高到相對于沒有主動順槳的凈推力的7 倍;Chen G W 等[8]設計了一款具備螺旋推進器的機器魚和一款尾鰭擺動推進的機器魚,采用實驗和仿真分析旋轉中心位置對機器魚模型偏航穩定性的影響,得到旋轉中心在魚體中間的機器魚受水流影響較小,仿生推進器具有更好的偏航穩定性;Ding J 等[9]設計了一款具有一個臀鰭、一個尾鰭、一對胸鰭的仿生機器魚,采用仿真和實驗分析,探索擺動頻率、幅度以及臀鰭尾鰭之間擺動的相位差對于魚體游動偏航穩定性的影響;Omari M 等[10]設計了一款具備可變形尾鰭,仿真模擬尾鰭擺動頻率和幅度對于推進力的影響,得到了不同尾鰭狀態的最佳運動參數;同時,與改變特定參數相比,運動參數的同步性對整體推力的影響更大。
目前,研究主要是通過水動力學仿真、實驗驗證這2 種方式去分析魚體水動力學性能,通過比較胸尾鰭運動頻率、幅度以及兩者之間的相位差等因素對該性能的影響,并探索相對合適的運動參數和運動方式。常見的魚體仿真分析未考慮尾頸尾鰭擺動時魚體體長不變的特點,使得仿真結果有相對誤差。為了克服這一問題,本文在考慮體長不變的基礎上,基于胸尾鰭水動力學分析方法確定胸尾鰭優化運動參數,探索胸鰭運動輔助魚體推進的作用機理。主要內容包括仿生機器魚系統設計、運動學建模、水動力學仿真分析、魚體游動實驗方案設計及結果分析等4 個部分。
1 仿生機器魚結構設計
本文以鲹科魚類作為仿生對象對魚體進行建模。鲹科魚類魚體主要由頭部、軀干和尾部組成,其身體運動部位主要為胸鰭和尾鰭,如圖1a 所示。通常,假設魚體截面形狀為橢圓形,坐標軸原點設在魚嘴處,如圖1b 所示,魚體截面橢圓長軸尺寸R(x)、短軸尺寸r(x)是隨截面位置尺寸變化而變化,遵循函數規律為
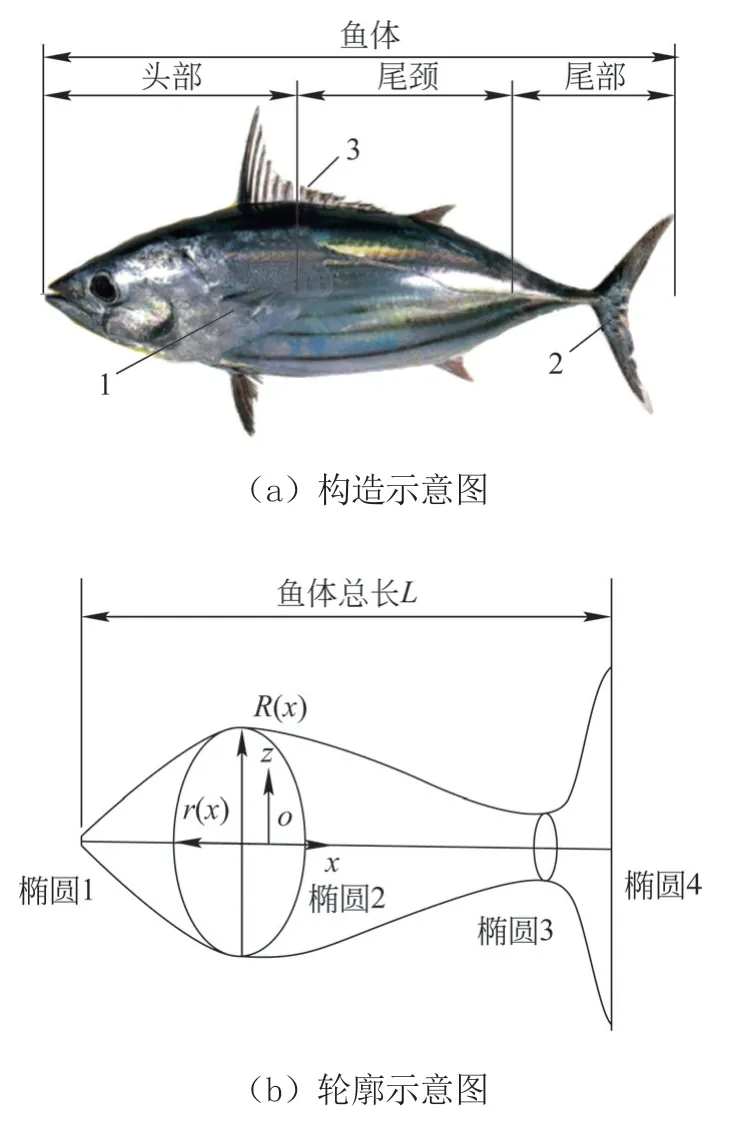
圖1 仿生魚體示意圖
式中:R(x)為任意橢圓截面上的長軸,r(x)為橢圓截面短軸。
Ri和ri參數對應4 組與長短軸有關的擬合參數[11],結合長短軸公式及關鍵截面擬合參數,可描出仿生魚截面長短軸頂點位置,由頂點位置可以擬合魚體外形輪廓,關鍵橢圓截面輪廓擬合參數如表1 所示。

表1 魚體輪廓擬合參數表
根據魚體外形輪廓擬合曲線,可繪制仿生魚體的外形輪廓如圖2a 所示,基于胸鰭、尾鰭、背鰭具體結構,構建的仿生機器魚三維模型結構如圖2b 所示,具體包括轉動單關節胸鰭機構、四關節尾鰭機構、背鰭、配重及魚體外殼部分組成。
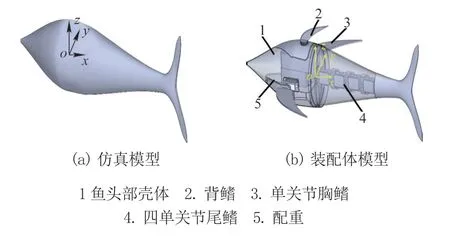
圖2 仿生魚體三維模型
2 仿生機器魚運動學建模及改進
魚體運動可以近似地描述為波幅沿身體不斷變大的類正弦曲線。魚體從靜止開始運動,波幅逐漸增大至最大幅度值,最終進入穩態游動狀態。假設魚體主要在xoy平面擺動,基于細長體理論,魚體體干線在xoy平面波動方程[12]為
式中:y(x,t)為魚體體干線上任意質點擺動位移;x為體干線質點的橫坐標;如圖3 所示,A點為魚體尾鰭擺動變形前的尾鰭端點,B點為魚體體長變化時尾鰭端點,C點為魚體體長不變時尾鰭端點,A點與C點橫坐標均為xw,B點對應橫坐標為x′w;c1、c2分別為魚體一次波、二次波振幅包絡系數;l為仿生機器魚質點到尾鰭端點體干線長度;λ為體干線波動時的波長;k為體干曲線波數,k=2π/λ;T為尾鰭擺動周期;ω為尾鰭擺動頻率,ω=2π/T。
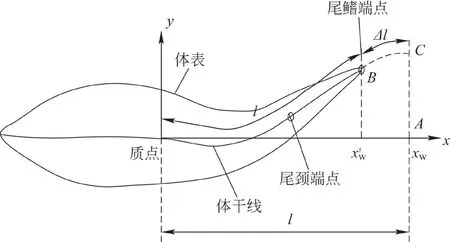
圖3 仿生機器魚魚體體長變化示意圖
魚體波波動方程描述了尾頸運動規律,尾頸擺動幅度包絡值可表示為,c1對原點附近的幅值影響較大,c2主要影響靠近尾鰭末端的幅值。尾鰭末端波動相位滯后于尾頸處波動相位。本文中,c1=0.09,c2=0.01,l=700 mm,λ=1,ω=6π。
細長體理論假設體干線質點在y軸方向上運動,忽略其在x軸方向的運動,導致魚體擺動過程中體長發生變化,魚體長度增加量為Δl,圖3 中BC段虛線曲線長度。若假定魚體體長變化,體長相對變化率相對擺動幅值、波長變化趨勢圖分別如圖4 所示。從圖中可以看出,波長對體長的影響較小。相對而言,幅值對體長的影響很大。當幅值達到體長的1/4 時,體長的變化率超過了16%,影響仿生機器魚數值模擬的準確性。因此,需要建立更加精確的運動學模型,描述魚體的波動運動。
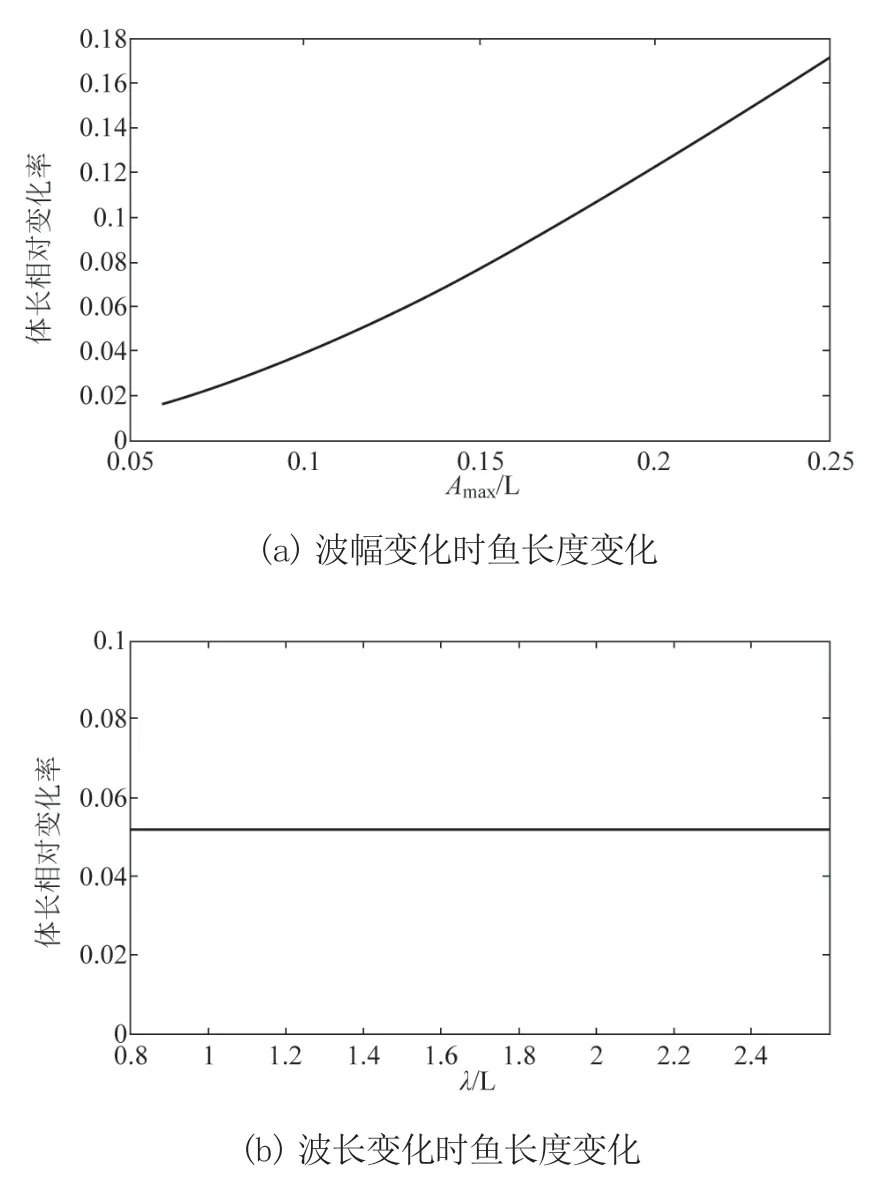
圖4 幅值和波長對體長相對變化率的影響
在魚體運動過程中,體干線上質點橫坐標和體長符合弧長積分公式[13]為
基于體長不變原則,魚體尾鰭體干線上某一點相對魚體質點長度等于初始水平位置尾鰭體干線上該點對應的橫坐標,即為l(x)=x0,代入公式
采用牛頓下山法求解此非線性方程式(5),其作用是基于光滑函數(導函數連續),通過迭代求解f(x)的零點,可得到該時刻下的尾鰭末端點的坐標,求得的坐標繪制成圖,如圖5 所示。
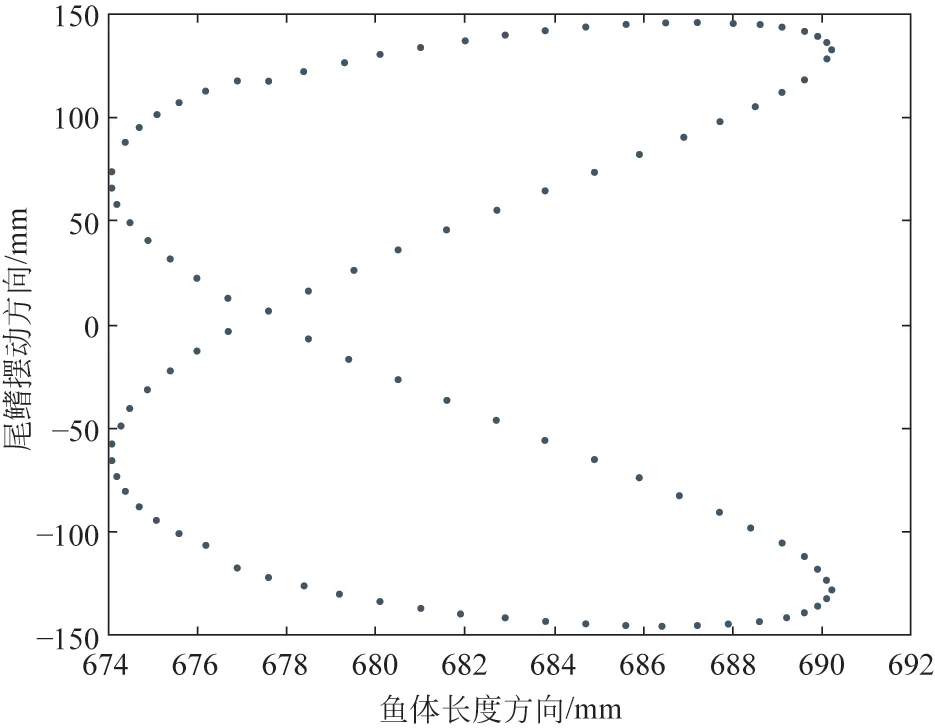
圖5 尾鰭末端軌跡
牛頓下山法求零點公式為
在式(6)中,下山因子(在下山法保證函數值穩定下降的前提下,用牛頓法加快收斂速度,需要將牛頓法的結果與前一項的近似值進行適當地加權平均作為新的改進值,需要一個加權比例,即下山因子)應設置在(0,1)范圍內,并且當這個因子的數值越小時,式(4)就越容易收斂,但是收斂速度會隨著這個數值的減小而減慢。本文經過多次測試,發現當因子取0.5 時,可保證所有的網格節點運動且收斂的速度是較快的。
式中:xk的初始值為x0。
為簡化運算用g(x)表示,則首先用加權面積公式求g(x)在0 ~xk的積分。
由式(7)轉化為
|xk+1-xk|<ε,其中ε趨近于無窮小為收斂條件,此處ε取10-6。
在擺動過程中,魚類由于肋骨的存在,體表質點會繞著脊柱關節點旋轉。
如圖6 所示,建立體干線局部坐標系。C點在坐標系xBByB下的坐標始終為(0,yc0),yc0為未擺動時C點縱坐標。坐標系xBByB相對于坐標系xAAyA旋轉了θB并向(AxB,AyB)平移,其中θB為魚體波曲線在B點的切線與xA軸的夾角,AxB為B點在坐標系xAAyA下的橫坐標,則C點在xAAyA下的坐標可表示為
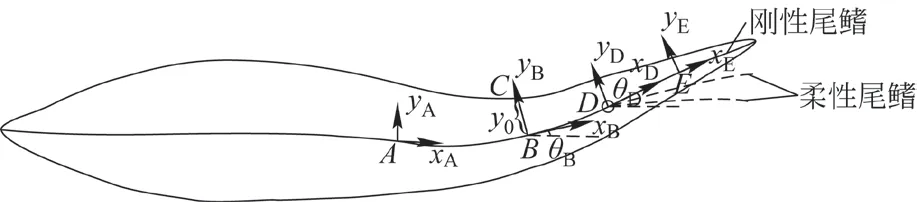
圖6 體干線局部坐標系
如圖7 所示,每一條曲線代表一個時刻,曲線和曲線上的星號分別表示當前時刻,魚體長度變化和魚體長度不變,各點的空間位置,尤其是尾鰭末端。可以看出,改進后的運動學模型相比原模型,在魚體波動時末端點的橫縱坐標均有變化。以此得到仿真時魚體體干線的變化規律,即改變后的體干線所在水平截面的運動規律,進而得到魚體整個輪廓的運動規律。
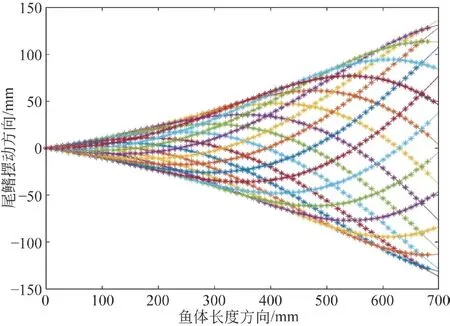
圖7 運動學模型改進前后對比圖
3 仿生機器魚水動力學仿真分析
魚體游動仿真需要使用動網格技術,屬于不規則運動,所以使用四面體非結構網格劃分流場模型,網格數量為100 萬。
3.1 仿生機器魚游動仿真最佳運動參數選擇
在Fluent 軟件中設置水力直徑、雷諾數、湍流強度、湍動能、湍動能耗散率、湍流粘度比等參數,設置速度入口設置為0.15 m/s,壓力出口設置為0 Pa,雷諾數結果>2 000,仿真使用湍流k-εRNG 模型。Fluent 軟件中設置參數的結果如下:
水力直徑[14]:
3.2 機器魚不同運動參數仿真
首先保持胸鰭不動,尾鰭擺動頻率為2 Hz,研究尾鰭擺動幅度對推進力的影響,得到最優尾鰭擺動幅度A,然后保持胸鰭不動,尾鰭擺動幅度為A,研究尾鰭擺動頻率對推進力的影響,得到最優尾鰭擺動頻率F;然后保持尾鰭擺動頻率為F,擺動幅度為A,胸鰭轉動角度為150°,研究胸鰭轉動頻率對推進力的影響,得到最優胸鰭轉動頻率f;最后保持尾鰭擺動頻率為F,擺動幅度為A,胸鰭轉動頻率為f,研究胸鰭轉動角度對推進力的影響,得到最優胸鰭轉動角度α。
從圖8 中可以得到最優尾鰭擺動幅度為65 mm,對應的推進力穩定值為1.3 N;從圖9 中可以看出魚體運動趨于平穩后,推進力呈周期性變化,得到最優尾鰭擺動頻率為3 Hz 時,推進力穩定值接近2 N,說明尾鰭擺動幅度和頻率相互影響不大,可獨立分析,此研究方案可行。尾鰭擺動頻率為3 Hz 和4 Hz 時,推進力穩定值接近,為2 N,為降低舵機負荷,取3 Hz 為最優尾鰭擺動頻率;從圖10 中可以得到最優胸鰭轉動頻率為3 Hz,對應的推進力穩定值為2.3 N;從圖11中可以得到最優胸鰭轉動角度為90°,對應的推進力穩定值為2.8 N。
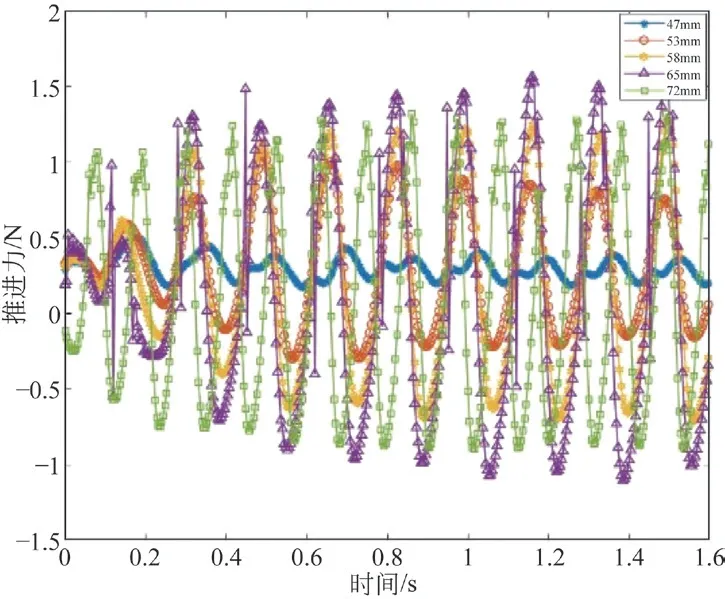
圖8 不同尾鰭擺動幅度下推進力隨時間變化曲線
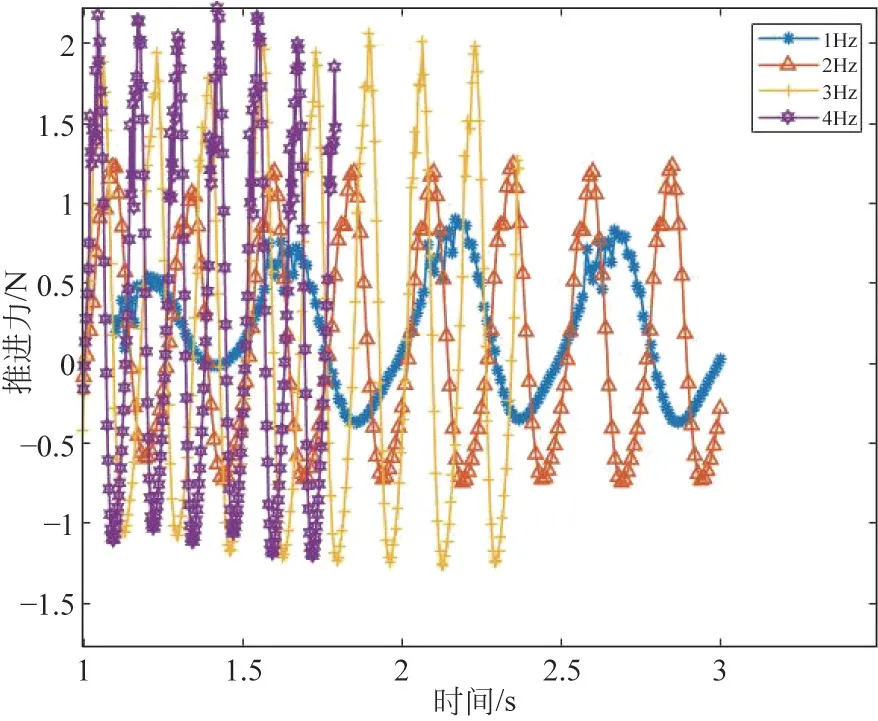
圖9 不同尾鰭擺動頻率下推進力隨時間變化曲線
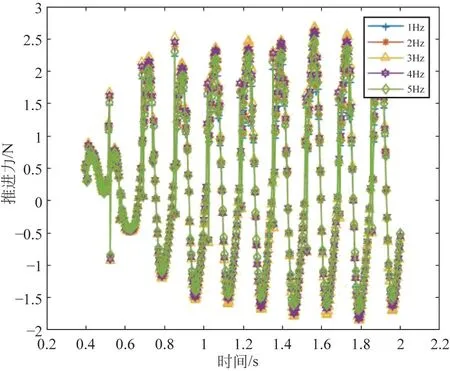
圖10 不同胸鰭擺動頻率下推進力隨時間變化曲線
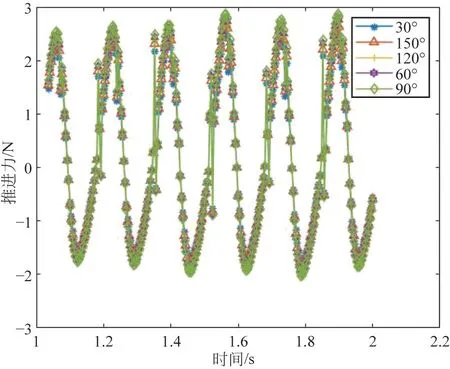
圖11 不同胸鰭擺動角度下推進力隨時間變化曲線
由以上結果可以得到,胸鰭對魚體直游有促進作用,且最優運動參數A=72 mm,F=3 Hz,α=90°,f=3 Hz。在最優運動參數下,研究魚體以及流場應力、流速以及渦的情況。
1/2 個周期內仿生機器魚的應力變化情況如圖12所示。圖12a ~圖12d 分別對應一個運動周期內T/8、2T/8、3T/8 和4T/8 共4 個時刻。

圖12 1/2 個周期內仿生機器魚的壓力變化
由圖12 可知,在胸鰭拍動至水平狀態時,魚體表面的應力差最大,此時表壓為0 Pa,最大正應力為314 Pa,最大負應力為-945 Pa,并且可見胸鰭中間部位應力大于四周,這是因為中間部位渦流無法脫離,只能被擠向四周;另外,尾鰭拍向的一側即水被擠壓的一側,該側應力大于另一側應力,由此可以看到,渦的產生、發展、脫落、湮滅的過程,渦最明顯時,渦中心應力為-361 Pa,并且尾鰭擺動時,擠壓側應力遠大于被擠壓側應力。尾鰭附近應力差也大于胸鰭附近的應力差。
1/2 個周期內仿生機器魚的速度變化情況如圖13 所示。圖13a ~圖13d 分別對應周期內T/8、2T/8、3T/8和4T/8 這4 個時刻。
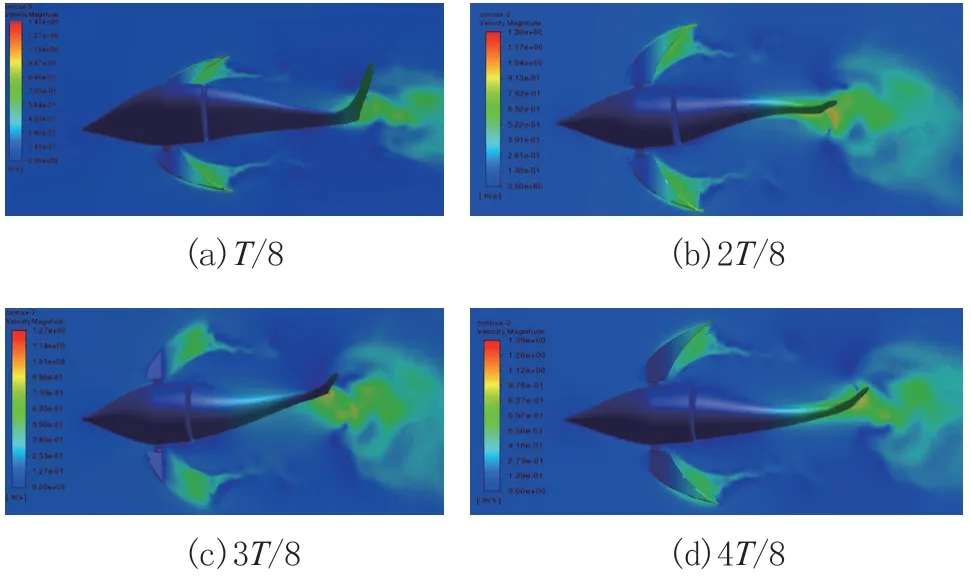
圖13 1/2 個周期內仿生機器魚的速度變化
由圖13 可知,在魚體運動至T/8 時,魚體附近渦流具有最大速度,而且此區域緊貼魚體尾鰭,為1.2 m/s,胸鰭后側和尾鰭后側處,相比于水中其他區域,水的速度更大;由云圖可以看出,尾鰭后端的水會隨著魚的向前游動和尾鰭擺動形成一條較寬的帶狀水流,而且隨著時間的推移,該尺寸會逐漸增大,直至穩定。
1/2 個周期內仿生機器魚的渦量變化情況如圖14所示。圖14a、圖14b 分別對應一個運動周期內T/8 和4T/8 這2 個時刻。

圖14 1/2 個周期內仿生機器魚的渦量變化
由圖14 可知,只有在運動的胸鰭尾鰭后側才會形成渦流,且胸鰭后側的渦流呈扇形狀,尾鰭后側的渦流接近半圓狀,從T/8 到3T/8 渦流區域有所增大,渦的密度變化不大。
表2 為仿真實驗中的應力變化云圖、速度變化云圖、渦量云圖以及力的大小。結合機器魚實際游動性能可知,具體分析仿真情況,流場中,魚體游動方向與水流方向相反,所以形成的渦附近的應力值均為負值;胸鰭轉動時,可以為魚體提供額外推進力,所以在該狀態下,魚體游動快速。
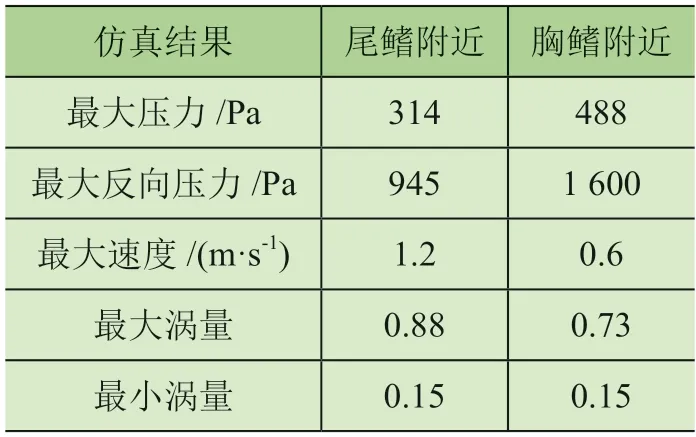
表2 仿真結果
4 實驗方案設計與實驗結果分析
4.1 實驗方案設計
4.1.1 機器魚實物制作及控制程序編寫
3D 打印魚體外殼、胸尾鰭以及連接件,硅膠澆筑尾頸蒙皮,將舵機、控制板、電池安裝在指定的位置,調試魚體運動,確定無誤后連接各個零件,加入配重并測試平衡性,密封并測試氣密性。
首先編寫運動程序,燒錄進控制板;然后將配套Lora 分別連在上位機和控制板上,并且連接好電路中的舵機控制板、穩壓模塊以及舵機(其中Lora 相比于藍牙、WiFi 等無線傳輸方式,可以有一定的水下傳輸能力);在上位機通過ATK-Lora 發送不同舵機運動指令;與控制板連接的Lora 收到上位機傳輸來的信號,將該信號傳輸給控制板,控制板將該信號進行A/D 轉換,變成PWM 脈沖通過穩壓傳輸給舵機,進而魚體可以執行不同方式的運動。魚體運動控制的流程圖如圖15 所示。

圖15 運動框架圖
魚體的運動包含三自由度尾鰭左右擺動,可為魚體前進提供推進力;單自由度胸鰭繞旋轉軸轉動,可輔助胸鰭前進,胸尾鰭的運動姿態如圖16 所示。

圖16 變速運動實物圖
4.1.2 設計實驗方案并開展實驗
測量魚體前游推進力的實驗原理是通過機器魚提供拉力拉扯綁在身體上的繩,通過支架上的定滑輪,拉扯0.75 kg 的砝碼,因為砝碼質量遠大于理論計算的拉力,所以砝碼不會被拉起,電子秤上示數前后差值即為繩的拉力,當繩子被拉直時,繩子與水面的夾角θ是固定的,則cosθ=0.95,魚體的推進力進而可以求得,其原理如圖17 所示。
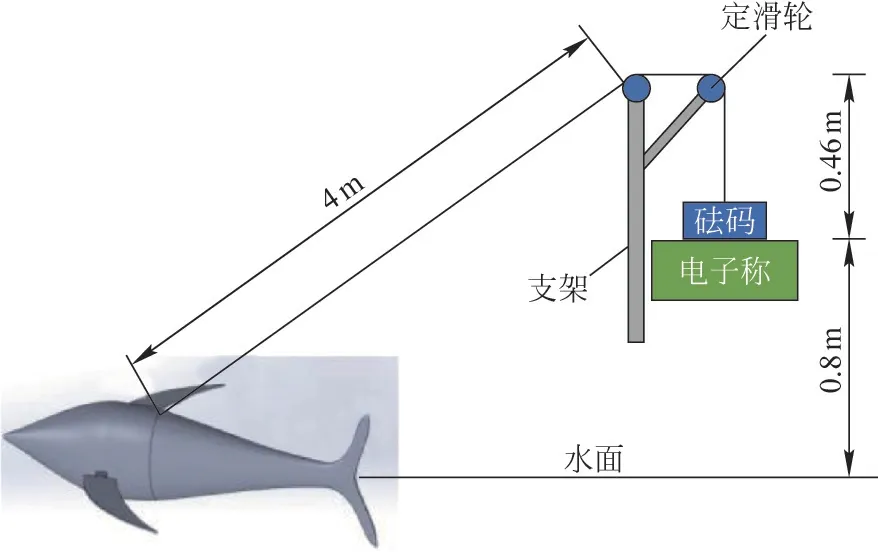
圖17 測推進力實驗原理圖
測量魚體速度采用的方法是,記錄魚游完使用不同長度繩子所用的時間,并且更換繩長,研究魚體加速和勻速游動的區域。
測量渦的特征采用的方法是將色素倒入實驗水池中,然后將魚調至運動模式,放于水中,錄制整個過程后,取游動穩定后的渦量圖,記錄渦的情況如圖18 所示。
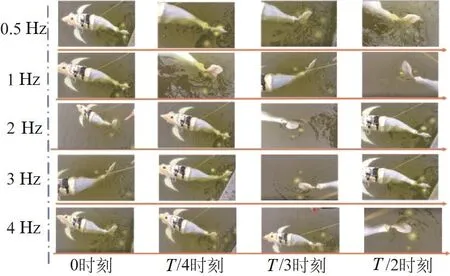
圖18 測量渦實驗
實驗采用的方法是控制變量法,即僅改變一個參數時,多次實驗,去掉遠離平均數的值,取前3 組正常值的平均值;研究其他因素對于魚體游動性能的影響時,僅改變單一變量,并多次重復實驗取平均值。
4.2 實驗結果分析
由圖19 可以看出,推進力首先隨著頻率的增大而增大,然后頻率從3 Hz 繼續增大至4 Hz 時,推進力反而減小;加入胸鰭輔助魚體游動后,其中胸鰭擺動頻率和尾鰭擺動頻率保持一致,推進力和無胸鰭的變化規律一樣,隨著頻率增大至3 Hz,魚體推進力持續增大,隨著頻率繼續增大至4 Hz,推進力反而減小。另外,在頻率下相同時,有胸鰭輔助的一組相比無胸鰭輔助的一組,推進力更大。
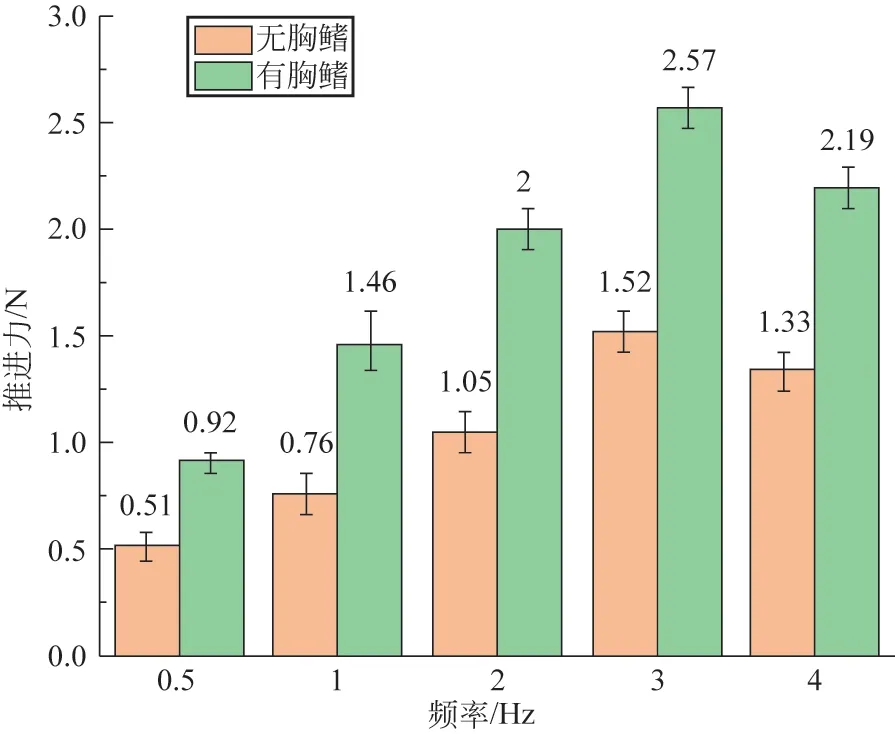
圖19 推進力-頻率圖
該結果說明,尾鰭擺動頻率為3 Hz 時,魚體推進力最大,同時胸鰭在45°~135°內轉動時,也能增大推進力,最大推進力為2.565 N。
比較游速與頻率的關系,使用的實驗方法是將魚體用長3 m 的繩子綁住,然后改變尾鰭擺動頻率,進行直游,計時游完整段繩子所用的時間。
由圖20 可以看出,隨著尾鰭擺動頻率的增大,游完3 m 繩子所用的時間依次減小,當頻率從3 Hz 繼續增大,所用時間反而增加;加入胸鰭輔助后,游完3 m繩子所用時間隨著頻率的增大而減小,當頻率從3 Hz繼續增大時,所用時間同樣增加。當頻率相同時,有胸鰭輔助相比無胸鰭輔助,游完3 m 繩子所用時間更短。該結果說明,3 Hz 尾鰭擺動頻率為魚體游動最佳頻率,胸鰭從水平方向順時針45°到逆時針45°內,即90°,魚體的推進力相比其他角度的推進力更大。

圖20 速度-頻率圖
由以上實驗可知,3 Hz 是魚體游動最快時的頻率,所以此處使用的方法是將魚體用長1 m、2 m、3 m、5 m 的繩子綁住,然后讓魚體以3 Hz 的頻率擺尾前進,記錄游完繩長時間。
由圖21 可以看出,魚體游完1 m 繩子的時間稍微長于游完1 ~2 m 及2 ~3 m 長度段的時間以及3 ~5 m 長度段時間的一半,故魚體加速時間僅僅在1 s 內。當引入胸鰭輔助游動后,游完相同長度的時間相比無胸鰭輔助的時間更短、速度更快。

圖21 速度-距離圖
由圖22 可以看出,頻率越大,生成渦的數量越多,從圖22a 中得到,時間均為1 s,尾鰭擺動頻率為0.5 Hz 時,可見渦數量為1;尾鰭擺動頻率為4 Hz,可見渦數量為3。隨著時間的推進,渦的數量會先增多,后減少,尾鰭擺動頻率為4 Hz,從圖22a 中得到,尾鰭擺動頻率為4 Hz,時間為1 s、2 s、3 s、4 s 時,可見渦數量分別為3、4、4、3。最大渦的尺寸也是隨著時間的推移,先增大后減小,直至湮滅。從圖22b 中得到,尾鰭擺動頻率為0.5 Hz,時間為1 s、2 s、3 s、4 s 時,可見渦數量分別為1、2、1、0,可見渦的最大尺寸分別為41 cm、51 cm、40 cm、0 cm。
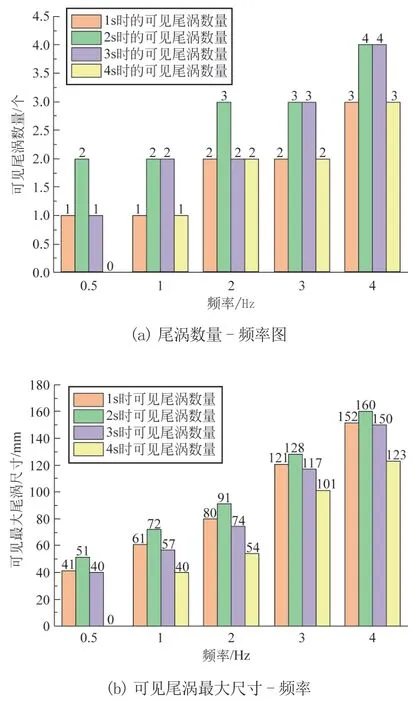
圖22 尾渦特征-頻率
5 結論
為探究胸鰭拍動以及胸尾鰭運動頻率和幅度對于魚體游動速度的影響,論文提出了一種四關節串聯尾鰭、單自由度胸鰭的仿生機器魚。首先進行了仿生機器魚的結構和控制系統設計,為仿真提供了魚體空腔模型,并為實驗驗證提供了硬件平臺;以機器魚體干線為研究基礎,建立其運動學模型,并基于牛頓下山法求解弧長公式以維持魚體長度不變,為仿真提供了魚體輪廓變形方程;然后以仿真比較胸尾鰭運動參數對魚體推進力的影響,在此基礎上,研究最佳運動參數下的魚體和流場應力、流速、渦等水動力學性能;最后設計了實驗方案并開展實驗,在實驗層面研究魚體水動力學性能,以驗證仿真結果。仿真與實驗均說明:胸尾鰭最佳運動頻率為3 Hz,而且胸鰭轉動可以輔助魚體直游,增大推進力。本文研究有利于改善水下航行器的多姿態運動方式,并為后續流體中變形物體的運動性能分析提供了可借鑒的方法。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55