基于相對增益陣的多變量系統輔助解耦控制系統設計
2023-08-06 16:47:39許鋒方勁舟王啟航羅雄麟
化工自動化及儀表 2023年4期
許鋒 方勁舟 王啟航 羅雄麟
摘 要 由于多變量系統內部的耦合作用,采用單一的分散常規控制器已經很難達到好的控制品質,分散常規控制器不能實現解耦功能,而直接設計解耦器又存在諸多困難。針對這種情況,在分散常規控制器的基礎之上,引入開環相對增益陣對多變量系統輔助控制器進行配對。依據控制系統的前饋控制原則,整定控制器參數,實現輔助控制器參數的設計。輔助控制器和主控制器共同作用,降低系統內部耦合,提高控制品質。
關鍵詞 過程控制 多變量系統 解耦 相對增益陣 PID 輔助控制器
中圖分類號 TP13? ?文獻標識碼 A? ?文章編號 1000-3932(2023)04-0411-08
單變量控制系統結構簡單,控制器參數設計方便,在工業領域的控制理論和應用已經相當成熟。然而,隨著工業過程的迅速發展,出現了大量的多變量系統,單變量控制系統已經很難滿足工業控制的需要。在多變量系統中,各個變量之間存在相互影響、相互制約,即多變量系統中存在耦合作用。
隨著多變量系統在工業生產方面的大量應用,需要研究的問題也相繼突出。多變量系統的復雜計算和系統內部存在不可忽視的耦合作用,這些問題引起了許多學者的關注和研究。ROSENBROCK H H提出利用逆Nyquist矩陣使多變量系統開環傳遞函數對角優勢化[1],使控制系統穩定。KHUEN H W等利用正Nyquist矩陣,提出了適合于多變量系統PID參數的自整定過程[2]。CHEN D和SEBORG D E提出在頻域內基于Gershgorin帶判據判斷多變量系統對角優勢化程度[3]。李旭等利用系統閉環傳遞函數的特征軌跡,設計出針對多變量系統的新解耦方法[4],這在多變量系統解耦的研究中起到了很大的促進作用。KOUVARITAKIS B和ROSSITER J A將自適應算法應用到多變量系統,該算法提高了多變量系統的穩定性[5]。WITTENMARK B實現了多變量系統的動態解耦,并在集散控制系統上得以實現[6]。RICHALET J等指出在實際工業中模型預測控制原理將在多變量系統中獲得廣泛應用[7]。
1966年,BRISTOL E H針對多變量系統的耦合作用,提出了相對增益陣(Relative Gain Array,RGA),對多變量系統耦合度進行評價,為控制系統變量配對提供了科學依據[8]。尼德林斯基指數(Niederlinski Index,NI)[9]也是一種適合尋找多變量系統內部變量配對的合適工具,可以和相對增益陣(RGA)配合使用。WITCHER M和MCAVOY T J提出了動態相對增益陣[10],可以對多變量系統動態和穩態的耦合程度進行測量,是很好的衡量多變量系統耦合度的性能指標。TUNG L S和EDGAR T F提出在狀態空間和頻率域內解決多變量系統的耦合性問題的方法[11]。XIONG Q等結合開環傳遞函數的增益和帶寬特性[12],提出了有效相對增益陣。HE M J等考慮穩態和瞬態信息對多變量系統的影響,提出了相對正則化增益陣[13],將其作為評估多變量系統各回路耦合作用的指標。任麗紅等提出了適用于多變量時滯系統的相對能量增益陣方法[14]。
分散常規控制器在低維控制系統中,因其參數設計簡單、便于操作的特點,應用已經相當成熟,然而分散常規控制器本身不具備削弱多變量系統內部耦合度的作用,因此不能在多變量系統中廣泛應用。集中控制器能全方位降低多變量系統內部的耦合作用,對多變量系統控制性能的提高起到了舉足輕重的作用,但是集中控制器的設計頗為復雜,如多變量預測控制,計算量很大,設計成本也有所上升,難以實現和維護。
倘若在設計好的分散常規控制器的基礎上添加解耦器,同樣可以達到削弱系統內部耦合,實現良好控制品質的要求。因此筆者在對角主控制器的基礎上,根據開環RGA選取剩余配對,設置輔助控制器進行解耦。主控制器和輔助控制器共同對多變量系統進行控制,降低了系統內部的耦合作用,有效提高了控制品質。
1 輔助常規控制系統設計方法
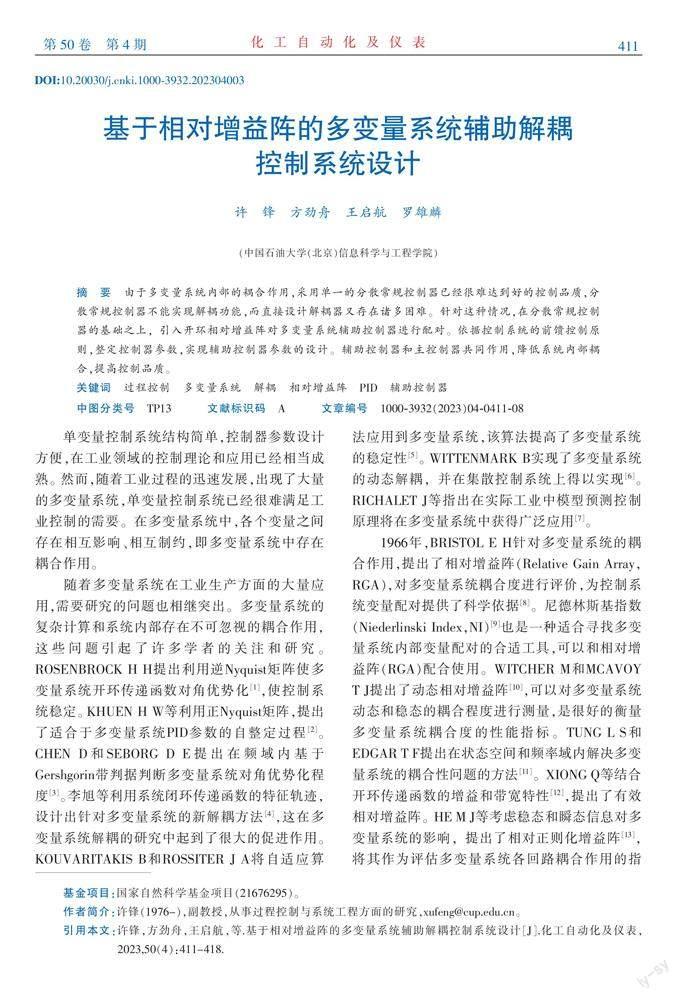
1.1 耦合度定義
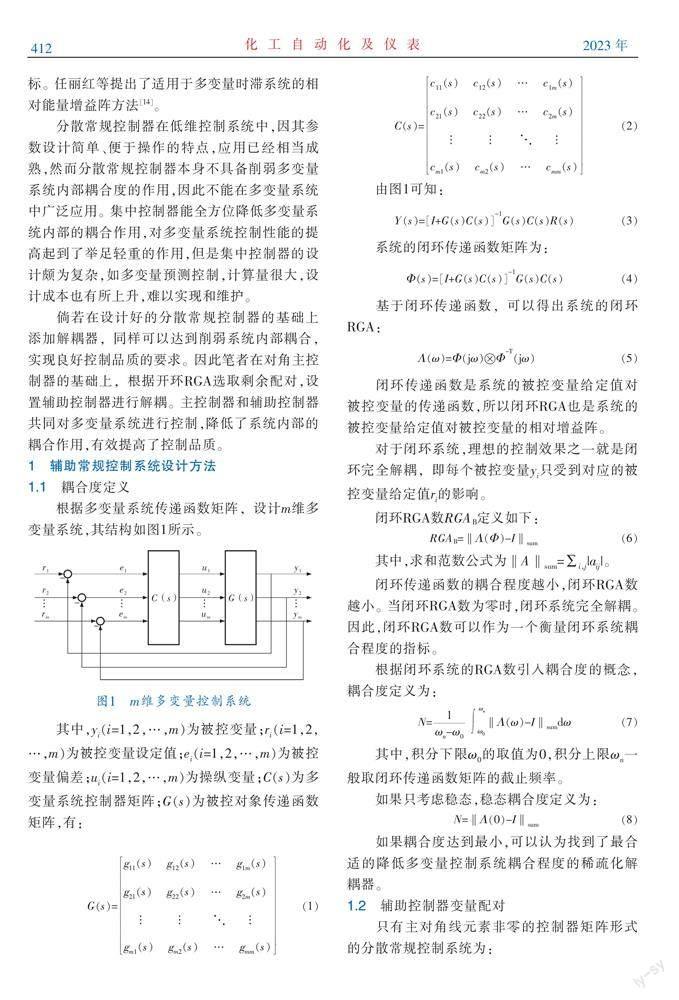
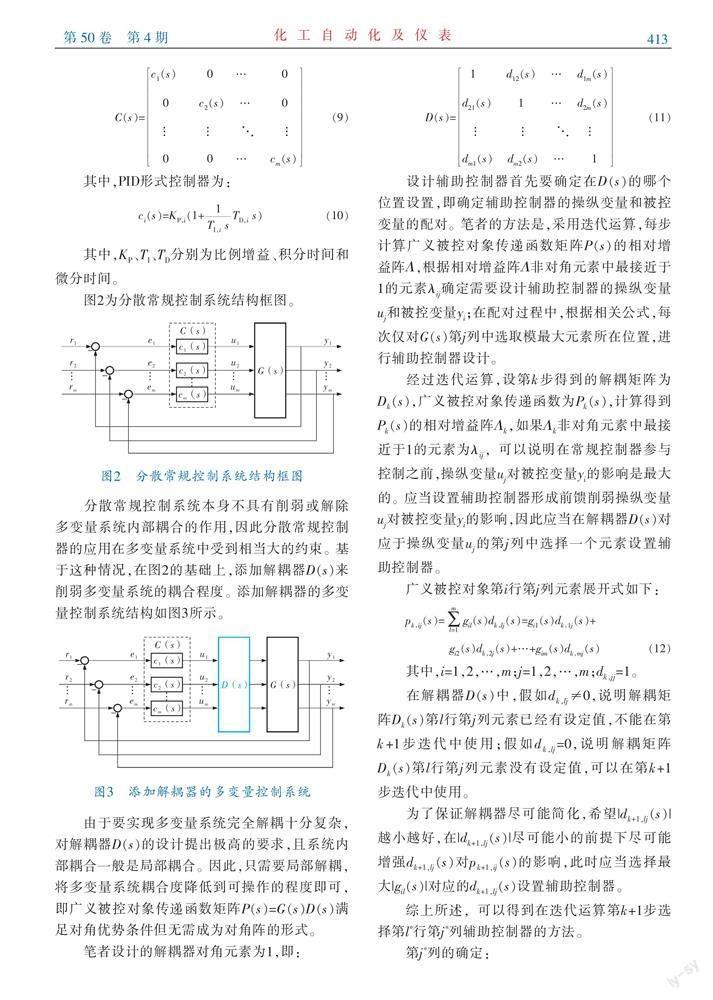
1.2 輔助控制器變量配對
1.3 輔助控制器參數整定
2 輔助控制器設計步驟
3 實例分析
4 結束語
多變量控制系統中一直存在不可忽略的耦合作用,然而分散常規控制系統不具備消除系統耦合的作用,因此分散常規控制系統在高維多變量系統中應用受到很大的局限,然而直接設計動態解耦器對控制器設計的要求非常高,且成本昂貴。
針對以上問題,筆者基于相對增益陣引出了耦合度的概念,在分散常規控制器的基礎上,設計解耦器。通過相對增益陣在頻域內的變量配對原則,在必要的位置添加輔助控制器,選用RGA作為衡量變量配對優劣的性能指標。反復迭代計算和采用耦合度衡量每一步解耦程度,完成多變量系統解耦的過程,從而實現了稀疏化控制。該設計方法很好地削弱了系統內部的耦合作用,提高了系統的控制性能。并把該方法的仿真結果與集中控制系統和分散常規控制系統的仿真結果做了對比,結果表明,筆者提出的輔助常規控制系統以消除耦合作用為目的,控制性能與集中控制系統的相近,遠優于分散常規控制系統,且該方法的設計大幅簡化了控制器的設計難度。
參 考 文 獻
[1]? ?ROSENBROCK H H. Design of multivariable control systems using the inverse Nyquist array[J]. Proceedings of the Institution of Electrical Engineers,1969,116(11):1929-1936.
[2]? ?KHUEN H W,HENG L T,XU W. The direct Nyquist array design of PID controllers[J]. IEEE Transaction on Industrial Electronics,2000,47(1):175-185.
[3]? ?CHEN D, SEBORG D E. Multiloop PI/PID controller design based on Gershgorin bands[J]. IEE Proceed-ings Control Theory and Applications,2002,149(1):68-73.
[4]? ?李旭,張殿華,周娜,等.特征軌跡法解耦活套高度和張力控制系統[J]. 信息與控制,2005,34(6):665-668.
[5]? ?KOUVARITAKIS B, ROSSITER J A. Multivariable Nyquist self-tuning:A general approach[J]. IEE Proceedings D-Control Theory and Applications,2006,136(5):189-202.
[6]? ?WITTENMARK B. Adaptive decoupling of multivaria-ble systems[J].International Journal of Control,1986,46(6):1993-2009.
[7]? ?RICHALET J,RAULT A,TESTUD J,et al.Model pre-dictive heuristic control:Applications to an Industrial Process[J].Automatica,1978:413-428.
[8]? ?BRISTOL E H.On a new measure of interaction for multivariable process control[J].IEEE Transactions Automatic Control,1966,11(1):133-134.
[9]? ?NIEDERLINSKI A.A Heuristic Approach to the Des-ign of Linear Multivariable Control Systems[J].Auto-matica,1971,7(7):691-701.
[10] WITCHER M,MCAVOY T J.Interacting control systems:Steady state and dynamic measurement of interaction[J].ISA Transaction,1977,16(3):83-90.
[11]? ?TUNG L S,EDGAR T F.Analysis of control-output interaction in dynamic systems[J].AICHE Journal,1981,27(4):690-693.
[12]? ?XIONG Q,CAI W J,HE M J.A practical loop pairing criterion for multivariable process[J]. Journal of Process Control,2005,15(7):741-747.
[13]? ?HE M J,CAI W J,NI W,et al. RNGA based control system configuration for multivariable process[J]. Journal of Process Control,2009,19(7):1036-1042.
[14]? ?任麗紅,劉雨波,羅雄麟,等.多變量時滯系統的關聯分析與變量配對[J].化工自動化及儀表,2012,39(6):743-746.
(收稿日期:2022-11-01,修回日期:2023-06-13)
Ancillary Decoupling Control System for Multivariable Systems
Based on Relative Gain Array
XU Feng,? FANG Jin-zhou, WANG Qi-hang, LUO Xiong-lin
(College of Information Science and Engineering, China University of Petroleum (Beijing) )
Abstract? ?Considering the coupling action within multivariable system, conventional and single decentralized PID controller becomes difficult to achieve good control quality. The decentralized controllers fail to realize decoupling function and it is difficult to design a decoupler directly. Based on the decentralized PID control system,? having the open-loop relative gain array adopted for? matching with the ancillary controller was implemented. Basing on the feed-forward control principle, the parameters of the ancillary controller were adjusted and the ancillary controller and the primary controller work together to reduce coupling degree in the system and improve control quality of the multivariable system.
Key words? ?process control, multivariable system, decoupling, relative gain array, PID, ancillary controller
