基于北斗定位技術(shù)的風(fēng)力發(fā)電場(chǎng)遠(yuǎn)程三維可視化巡檢方法
2023-08-06 14:35:21楊錫鋒繆京東王洋羊謝飛飛侯藝偉何書(shū)君
化工自動(dòng)化及儀表 2023年4期
楊錫鋒 繆京東 王洋羊 謝飛飛 侯藝偉 何書(shū)君
摘 要 針對(duì)風(fēng)力發(fā)電場(chǎng)風(fēng)機(jī)、葉片等設(shè)備容易偏航,日常巡檢周期較長(zhǎng),維護(hù)難度較大的現(xiàn)狀,提出基于北斗定位技術(shù)的風(fēng)力發(fā)電場(chǎng)遠(yuǎn)程三維可視化巡檢方法。實(shí)驗(yàn)結(jié)果表明:該方法可以精準(zhǔn)采集地形數(shù)據(jù),風(fēng)力發(fā)電場(chǎng)的自然景觀(guān)等附屬場(chǎng)景模擬效果較優(yōu),通過(guò)風(fēng)力發(fā)電場(chǎng)三維可視化模型可以快速定位風(fēng)力發(fā)電場(chǎng)的故障位置。
關(guān)鍵詞 北斗定位技術(shù) 風(fēng)力發(fā)電場(chǎng) 三維可視 球面經(jīng)緯度坐標(biāo) 故障定位
中圖分類(lèi)號(hào) TP274;TM63? ?文獻(xiàn)標(biāo)識(shí)碼 A? ?文章編號(hào) 1000-3932(2023)04-0564-05
風(fēng)力發(fā)電場(chǎng)是新能源配電網(wǎng)的核心場(chǎng)所,風(fēng)力發(fā)電場(chǎng)設(shè)有大量機(jī)組設(shè)備,風(fēng)力發(fā)電場(chǎng)的風(fēng)機(jī)、葉片等設(shè)備容易偏航,進(jìn)而影響電力系統(tǒng)運(yùn)行的安全性[1]。為了保證配電網(wǎng)生產(chǎn)作業(yè)和安全,風(fēng)力發(fā)電場(chǎng)的巡檢水平極為重要。文獻(xiàn)[2]應(yīng)用多機(jī)等值模型,充分反映風(fēng)電場(chǎng)的動(dòng)態(tài)特性,通過(guò)風(fēng)力發(fā)電場(chǎng)的遠(yuǎn)程三維可視化巡檢,實(shí)時(shí)監(jiān)測(cè)風(fēng)力發(fā)電場(chǎng)內(nèi)機(jī)組設(shè)備的狀態(tài),提升了風(fēng)力發(fā)電場(chǎng)運(yùn)行的可靠性。為了更準(zhǔn)確地研究風(fēng)力發(fā)電結(jié)構(gòu)在風(fēng)荷載下的結(jié)構(gòu)響應(yīng),文獻(xiàn)[3]利用最小二乘法擬合各分布函數(shù)參數(shù),結(jié)合最大基本風(fēng)速規(guī)范建議值,確認(rèn)基本風(fēng)速下的風(fēng)力發(fā)電結(jié)構(gòu)的安全性。
風(fēng)力發(fā)電場(chǎng)面積較廣,作業(yè)過(guò)程出現(xiàn)異常時(shí),如果不能及時(shí)明確異常位置,巡檢人員就無(wú)法獲取精準(zhǔn)的故障位置。北斗定位技術(shù)是衛(wèi)星導(dǎo)航系統(tǒng)中的重要技術(shù),北斗定位技術(shù)包括用戶(hù)段、地面段和空間段,在復(fù)雜環(huán)境下,仍然可以獲取精準(zhǔn)的定位數(shù)據(jù)。文獻(xiàn)[4]針對(duì)鄱陽(yáng)湖區(qū)域風(fēng)場(chǎng),研究了風(fēng)場(chǎng)數(shù)據(jù)后端動(dòng)態(tài)抓取、解析及存儲(chǔ)技術(shù),進(jìn)行了三維動(dòng)態(tài)可視化研究,建立了粒子從地理坐標(biāo)至屏幕畫(huà)布坐標(biāo)的轉(zhuǎn)換模型,對(duì)于掌握湖區(qū)及周邊風(fēng)場(chǎng)數(shù)據(jù)有重要意義。文獻(xiàn)[5]以北斗短報(bào)文等特色服務(wù)為主要信息傳輸,融合互聯(lián)網(wǎng)和人工智能技術(shù),展示了北斗物聯(lián)網(wǎng)技術(shù)架構(gòu)創(chuàng)新驅(qū)動(dòng)發(fā)展的新動(dòng)能。
由于風(fēng)力發(fā)電場(chǎng)的日常巡檢周期較長(zhǎng),無(wú)法獲取序列化的、精準(zhǔn)的定位信息,難以提升風(fēng)力發(fā)電場(chǎng)的巡檢效率。為此,筆者提出基于北斗定位技術(shù)的風(fēng)力發(fā)電場(chǎng)遠(yuǎn)程三維可視化巡檢方法,創(chuàng)新性地在利用北斗定位技術(shù)獲取風(fēng)力發(fā)電場(chǎng)的精準(zhǔn)地形數(shù)據(jù)的基礎(chǔ)上,二次確認(rèn)風(fēng)力發(fā)電場(chǎng)的坐標(biāo)信息,構(gòu)建風(fēng)力發(fā)電場(chǎng)三維可視化模型,以實(shí)現(xiàn)風(fēng)力發(fā)電場(chǎng)的遠(yuǎn)程巡檢。
1 風(fēng)力發(fā)電場(chǎng)遠(yuǎn)程三維可視化巡檢方法
1.1 風(fēng)力發(fā)電場(chǎng)地形數(shù)據(jù)采集
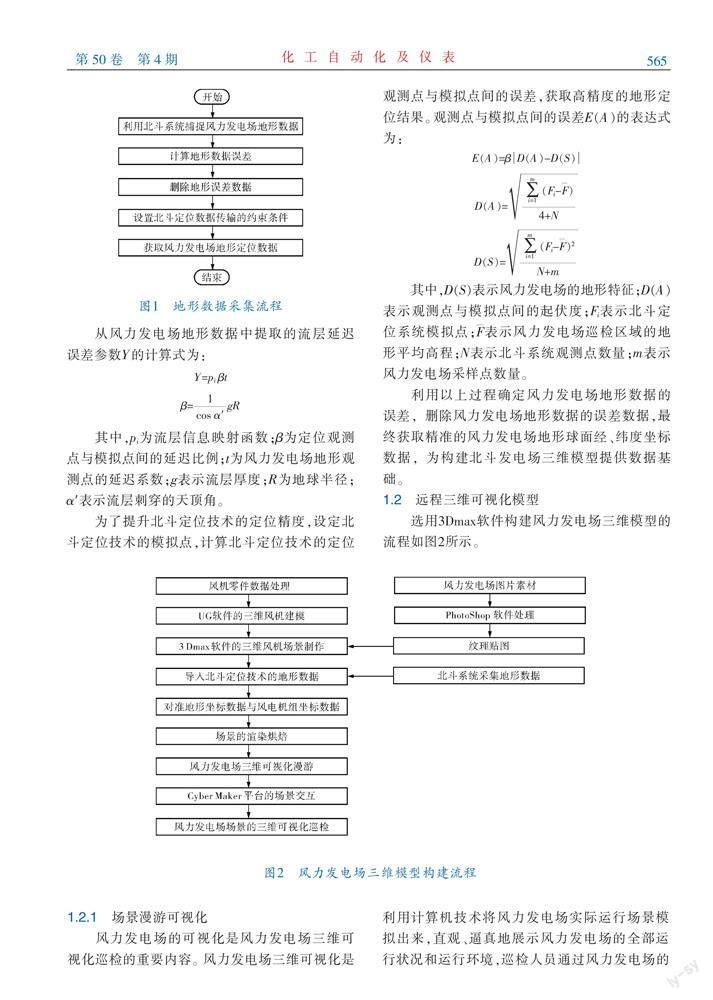
利用北斗定位技術(shù)獲取風(fēng)力發(fā)電場(chǎng)的高精度地形定位數(shù)據(jù),流程如圖1所示。
利用北斗定位技術(shù)采集風(fēng)力發(fā)電場(chǎng)的地形數(shù)據(jù),衛(wèi)星采集的球面經(jīng)、緯度坐標(biāo)數(shù)據(jù)有流層延遲誤差存在,需要對(duì)所采集數(shù)據(jù)處理后,應(yīng)用于風(fēng)力發(fā)電場(chǎng)的三維可視化巡檢中。
1.2 遠(yuǎn)程三維可視化模型
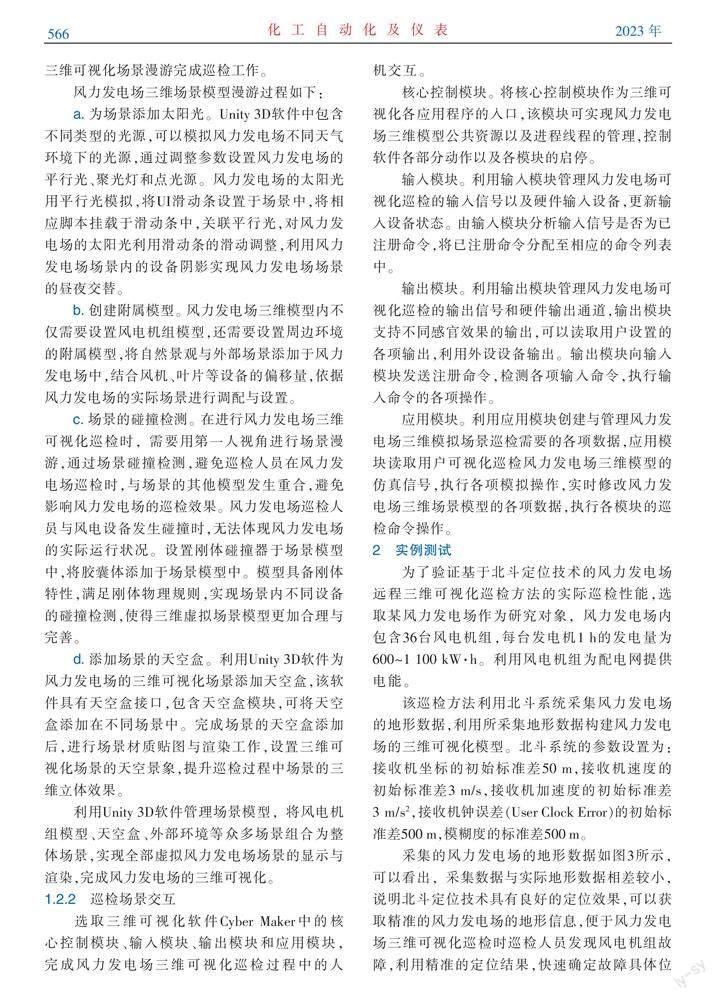
選用3Dmax軟件構(gòu)建風(fēng)力發(fā)電場(chǎng)三維模型的流程如圖2所示。
1.2.1 場(chǎng)景漫游可視化
風(fēng)力發(fā)電場(chǎng)的可視化是風(fēng)力發(fā)電場(chǎng)三維可視化巡檢的重要內(nèi)容。風(fēng)力發(fā)電場(chǎng)三維可視化是利用計(jì)算機(jī)技術(shù)將風(fēng)力發(fā)電場(chǎng)實(shí)際運(yùn)行場(chǎng)景模擬出來(lái),直觀(guān)、逼真地展示風(fēng)力發(fā)電場(chǎng)的全部運(yùn)行狀況和運(yùn)行環(huán)境,巡檢人員通過(guò)風(fēng)力發(fā)電場(chǎng)的三維可視化場(chǎng)景漫游完成巡檢工作。
風(fēng)力發(fā)電場(chǎng)三維場(chǎng)景模型漫游過(guò)程如下:
a. 為場(chǎng)景添加太陽(yáng)光。Unity 3D軟件中包含不同類(lèi)型的光源,可以模擬風(fēng)力發(fā)電場(chǎng)不同天氣環(huán)境下的光源,通過(guò)調(diào)整參數(shù)設(shè)置風(fēng)力發(fā)電場(chǎng)的平行光、聚光燈和點(diǎn)光源。風(fēng)力發(fā)電場(chǎng)的太陽(yáng)光用平行光模擬,將UI滑動(dòng)條設(shè)置于場(chǎng)景中,將相應(yīng)腳本掛載于滑動(dòng)條中,關(guān)聯(lián)平行光,對(duì)風(fēng)力發(fā)電場(chǎng)的太陽(yáng)光利用滑動(dòng)條的滑動(dòng)調(diào)整,利用風(fēng)力發(fā)電場(chǎng)場(chǎng)景內(nèi)的設(shè)備陰影實(shí)現(xiàn)風(fēng)力發(fā)電場(chǎng)場(chǎng)景的晝夜交替。
b. 創(chuàng)建附屬模型。風(fēng)力發(fā)電場(chǎng)三維模型內(nèi)不僅需要設(shè)置風(fēng)電機(jī)組模型,還需要設(shè)置周邊環(huán)境的附屬模型,將自然景觀(guān)與外部場(chǎng)景添加于風(fēng)力發(fā)電場(chǎng)中,結(jié)合風(fēng)機(jī)、葉片等設(shè)備的偏移量,依據(jù)風(fēng)力發(fā)電場(chǎng)的實(shí)際場(chǎng)景進(jìn)行調(diào)配與設(shè)置。
c. 場(chǎng)景的碰撞檢測(cè)。在進(jìn)行風(fēng)力發(fā)電場(chǎng)三維可視化巡檢時(shí),需要用第一人視角進(jìn)行場(chǎng)景漫游,通過(guò)場(chǎng)景碰撞檢測(cè),避免巡檢人員在風(fēng)力發(fā)電場(chǎng)巡檢時(shí),與場(chǎng)景的其他模型發(fā)生重合,避免影響風(fēng)力發(fā)電場(chǎng)的巡檢效果。風(fēng)力發(fā)電場(chǎng)巡檢人員與風(fēng)電設(shè)備發(fā)生碰撞時(shí),無(wú)法體現(xiàn)風(fēng)力發(fā)電場(chǎng)的實(shí)際運(yùn)行狀況。設(shè)置剛體碰撞器于場(chǎng)景模型中,將膠囊體添加于場(chǎng)景模型中。模型具備剛體特性,滿(mǎn)足剛體物理規(guī)則,實(shí)現(xiàn)場(chǎng)景內(nèi)不同設(shè)備的碰撞檢測(cè),使得三維虛擬場(chǎng)景模型更加合理與完善。
d. 添加場(chǎng)景的天空盒。利用Unity 3D軟件為風(fēng)力發(fā)電場(chǎng)的三維可視化場(chǎng)景添加天空盒,該軟件具有天空盒接口,包含天空盒模塊,可將天空盒添加在不同場(chǎng)景中。完成場(chǎng)景的天空盒添加后,進(jìn)行場(chǎng)景材質(zhì)貼圖與渲染工作,設(shè)置三維可視化場(chǎng)景的天空景象,提升巡檢過(guò)程中場(chǎng)景的三維立體效果。
利用Unity 3D軟件管理場(chǎng)景模型,將風(fēng)電機(jī)組模型、天空盒、外部環(huán)境等眾多場(chǎng)景組合為整體場(chǎng)景,實(shí)現(xiàn)全部虛擬風(fēng)力發(fā)電場(chǎng)場(chǎng)景的顯示與渲染,完成風(fēng)力發(fā)電場(chǎng)的三維可視化。
1.2.2 巡檢場(chǎng)景交互
選取三維可視化軟件Cyber Maker中的核心控制模塊、輸入模塊、輸出模塊和應(yīng)用模塊,完成風(fēng)力發(fā)電場(chǎng)三維可視化巡檢過(guò)程中的人機(jī)交互。
核心控制模塊。將核心控制模塊作為三維可視化各應(yīng)用程序的入口,該模塊可實(shí)現(xiàn)風(fēng)力發(fā)電場(chǎng)三維模型公共資源以及進(jìn)程線(xiàn)程的管理,控制軟件各部分動(dòng)作以及各模塊的啟停。
輸入模塊。利用輸入模塊管理風(fēng)力發(fā)電場(chǎng)可視化巡檢的輸入信號(hào)以及硬件輸入設(shè)備,更新輸入設(shè)備狀態(tài)。由輸入模塊分析輸入信號(hào)是否為已注冊(cè)命令,將已注冊(cè)命令分配至相應(yīng)的命令列表中。
輸出模塊。利用輸出模塊管理風(fēng)力發(fā)電場(chǎng)可視化巡檢的輸出信號(hào)和硬件輸出通道,輸出模塊支持不同感官效果的輸出,可以讀取用戶(hù)設(shè)置的各項(xiàng)輸出,利用外設(shè)設(shè)備輸出。輸出模塊向輸入模塊發(fā)送注冊(cè)命令,檢測(cè)各項(xiàng)輸入命令,執(zhí)行輸入命令的各項(xiàng)操作。
應(yīng)用模塊。利用應(yīng)用模塊創(chuàng)建與管理風(fēng)力發(fā)電場(chǎng)三維模擬場(chǎng)景巡檢需要的各項(xiàng)數(shù)據(jù),應(yīng)用模塊讀取用戶(hù)可視化巡檢風(fēng)力發(fā)電場(chǎng)三維模型的仿真信號(hào),執(zhí)行各項(xiàng)模擬操作,實(shí)時(shí)修改風(fēng)力發(fā)電場(chǎng)三維場(chǎng)景模型的各項(xiàng)數(shù)據(jù),執(zhí)行各模塊的巡檢命令操作。
2 實(shí)例測(cè)試
為了驗(yàn)證基于北斗定位技術(shù)的風(fēng)力發(fā)電場(chǎng)遠(yuǎn)程三維可視化巡檢方法的實(shí)際巡檢性能,選取某風(fēng)力發(fā)電場(chǎng)作為研究對(duì)象,風(fēng)力發(fā)電場(chǎng)內(nèi)包含36臺(tái)風(fēng)電機(jī)組,每臺(tái)發(fā)電機(jī)1 h的發(fā)電量為600~1 100 kW·h。利用風(fēng)電機(jī)組為配電網(wǎng)提供電能。
該巡檢方法利用北斗系統(tǒng)采集風(fēng)力發(fā)電場(chǎng)的地形數(shù)據(jù),利用所采集地形數(shù)據(jù)構(gòu)建風(fēng)力發(fā)電場(chǎng)的三維可視化模型。北斗系統(tǒng)的參數(shù)設(shè)置為:接收機(jī)坐標(biāo)的初始標(biāo)準(zhǔn)差50 m,接收機(jī)速度的初始標(biāo)準(zhǔn)差3 m/s,接收機(jī)加速度的初始標(biāo)準(zhǔn)差3 m/s2,接收機(jī)鐘誤差(User Clock Error)的初始標(biāo)準(zhǔn)差500 m,模糊度的標(biāo)準(zhǔn)差500 m。
采集的風(fēng)力發(fā)電場(chǎng)的地形數(shù)據(jù)如圖3所示,可以看出,采集數(shù)據(jù)與實(shí)際地形數(shù)據(jù)相差較小,說(shuō)明北斗定位技術(shù)具有良好的定位效果,可以獲取精準(zhǔn)的風(fēng)力發(fā)電場(chǎng)的地形信息,便于風(fēng)力發(fā)電場(chǎng)三維可視化巡檢時(shí)巡檢人員發(fā)現(xiàn)風(fēng)電機(jī)組故障,利用精準(zhǔn)的定位結(jié)果,快速確定故障具體位置,提升風(fēng)力發(fā)電場(chǎng)的運(yùn)維水平。
用圖3地形數(shù)據(jù)構(gòu)建的風(fēng)力發(fā)電場(chǎng)的風(fēng)電機(jī)組模型結(jié)果如圖4所示。
依據(jù)風(fēng)電機(jī)組的實(shí)際運(yùn)行狀態(tài),采集風(fēng)電機(jī)組的運(yùn)行參數(shù),構(gòu)建與風(fēng)力發(fā)電場(chǎng)內(nèi)的風(fēng)電機(jī)組具有相同運(yùn)行狀態(tài)的風(fēng)電機(jī)組。所構(gòu)建風(fēng)電機(jī)組的三維模型紋理清晰,可以直觀(guān)展示風(fēng)電機(jī)組的細(xì)節(jié)信息。
采用所提方法構(gòu)建的風(fēng)力發(fā)電場(chǎng)最終的三維可視化模型如圖5所示,可以看出,采用筆者方法可以利用所構(gòu)建的風(fēng)電機(jī)組三維模型組合為風(fēng)力發(fā)電場(chǎng)三維可視化場(chǎng)景模型,不僅可以真實(shí)展現(xiàn)風(fēng)力發(fā)電場(chǎng)內(nèi)風(fēng)電機(jī)組的運(yùn)行狀態(tài),還可以模擬風(fēng)力發(fā)電場(chǎng)的自然景觀(guān)等附屬場(chǎng)景。
應(yīng)用該方法,進(jìn)行實(shí)例測(cè)試與結(jié)果分析,風(fēng)力發(fā)電場(chǎng)2021年3月11日的巡檢結(jié)果見(jiàn)表1。
可以看出,采用該方法可以實(shí)現(xiàn)風(fēng)力發(fā)電場(chǎng)的三維可視化巡檢,獲取風(fēng)力發(fā)電場(chǎng)的風(fēng)向、風(fēng)速等信息,即通過(guò)風(fēng)力發(fā)電場(chǎng)的三維可視化巡檢,利用北斗定位技術(shù)的定位功能,精準(zhǔn)定位故障點(diǎn),提升風(fēng)力發(fā)電場(chǎng)內(nèi)風(fēng)電機(jī)組的運(yùn)行可靠性。
3 結(jié)束語(yǔ)
利用北斗定位技術(shù)構(gòu)建風(fēng)力發(fā)電場(chǎng)的數(shù)字地圖,構(gòu)建風(fēng)力發(fā)電場(chǎng)的三維可視化模型,實(shí)現(xiàn)了風(fēng)力發(fā)電場(chǎng)的遠(yuǎn)程巡檢,在提升配電網(wǎng)的安全巡檢水平和巡檢效率同時(shí)減少了風(fēng)力發(fā)電場(chǎng)巡檢人員數(shù)量,加快了風(fēng)力發(fā)電場(chǎng)突發(fā)事件和故障的處置速度,使風(fēng)力發(fā)電場(chǎng)的巡檢工作滿(mǎn)足可管可控的要求,應(yīng)用前景廣闊。
參 考 文 獻(xiàn)
[1] 許世健,趙丹,蘇鋮宇,等.面向流場(chǎng)可視化的沉浸式虛擬現(xiàn)實(shí)交互系統(tǒng)研究[J].系統(tǒng)仿真學(xué)報(bào),2022,34(5):1160-1172.
[2] 蘇柯文,張永明,胡維飛.基于參數(shù)測(cè)量的風(fēng)力發(fā)電場(chǎng)等值建模方法研究[J].電測(cè)與儀表,2020,57(18):29-35.
[3] 李萬(wàn)潤(rùn),張廣隸,李林,等.基于長(zhǎng)期實(shí)測(cè)數(shù)據(jù)的西北地區(qū)風(fēng)力發(fā)電場(chǎng)風(fēng)速風(fēng)向聯(lián)合概率分布分析[J].蘭州理工大學(xué)學(xué)報(bào),2022,48(3):115-124.
[4] 袁武彬,廖明偉,廖明,等.鄱陽(yáng)湖區(qū)域風(fēng)場(chǎng)矢量的Web三維動(dòng)態(tài)可視化[J].地理與地理信息科學(xué),2020,36(1):22-26.
[5] 謝軍,莊建樓,康成斌.基于北斗系統(tǒng)的物聯(lián)網(wǎng)技術(shù)與應(yīng)用[J].南京航空航天大學(xué)學(xué)報(bào),2021,53(3):329-337.
(收稿日期:2023-01-12,修回日期:2023-03-02)
Remote 3D Visualization Inspection Method for Wind Farms
Based on Beidou Positioning Technology
YANG Xi-feng, MIAO Jing-dong, WANG Yang-yang, XIE Fei-fei,
HOU Yi-wei, HE Shu-jun
(Longyuan Power Group (Shanghai)New Energy Co., Ltd.)
Abstract? ?Fans, blades and other equipment in wind power farms are easy to yaw and the daily inspection cycle is long and the maintenance becomes difficult. In this paper, the remote 3D visualization inspection method for wind farms based on Beidou positioning technology was proposed. The experimental results show that, the method proposed can accurately collect topographic data, and the simulation effect of ancillary scenes such as the natural landscape of wind farms is better. Through 3D visualization model of the wind farm, the fault position of the wind farm can be located quickly.
Key words? ?Beidou positioning technology, wind farm, 3D visualization, spherical latitude and longitude coordinates, fault location
