纏紙流程自控系統(tǒng)的設(shè)計(jì)與應(yīng)用
2023-08-06 14:35:21周書(shū)亮谷傳龍李斌李建一孫志剛李汝江高平平安立芬
化工自動(dòng)化及儀表 2023年4期
周書(shū)亮 谷傳龍 李斌 李建一 孫志剛 李汝江 高平平 安立芬


摘 要 針對(duì)鋼管防腐生產(chǎn)線纏紙工序采用手動(dòng)纏繞的現(xiàn)狀,設(shè)計(jì)基于PLC、伺服定位系統(tǒng)等的鋼管自動(dòng)纏紙裝置及其交互控制系統(tǒng)。該系統(tǒng)的上線運(yùn)行,避免了人工介入的不穩(wěn)定因素,提高了鋼管流程輸送效率,降低了防腐質(zhì)量風(fēng)險(xiǎn),同時(shí)減輕了崗位人員的勞動(dòng)強(qiáng)度。
關(guān)鍵詞 交互控制 鋼管防腐 纏紙 傳感器 輸送效率
中圖分類號(hào) TP273? ?文獻(xiàn)標(biāo)識(shí)碼 B? ?文章編號(hào) 1000-3932(2023)04-0573-08
華油鋼管有限公司?準(zhǔn)508 mm~2 540 mm防腐生產(chǎn)線涂覆前準(zhǔn)備區(qū)域的纏紙工序采用手動(dòng)操作方式,區(qū)域內(nèi)鋼管防腐處理工序較多,需要外觀檢驗(yàn)、上連接器等,人工介入點(diǎn)多,操作繁瑣。在纏紙?zhí)幚砉ば蜻^(guò)程中,需要人工在鋼管兩端纏繞紙帶,纏紙效率低、勞動(dòng)強(qiáng)度大。輸送輥道和橫移車操作存在不連續(xù)情況,需要頻繁切換操作點(diǎn),占用時(shí)間長(zhǎng)。外拋丸工序鋼管拋丸處理速度較快,而人工纏紙工序鋼管流程處理不及時(shí),極其容易造成鋼管流程擁堵[1]。因此,公司組織技術(shù)人員設(shè)計(jì)鋼管涂覆準(zhǔn)備區(qū)域纏紙流程自控系統(tǒng),以期實(shí)現(xiàn)鋼管在外拋丸后和涂覆前的纏紙、輥道及橫移車等工序的自動(dòng)輸送和設(shè)備間的交互控制[2]。
1 防腐流程簡(jiǎn)介
埋弧焊管防腐生產(chǎn)線主要由輸送輥道、橫移車、外拋丸、纏紙、中頻加熱、粉末噴涂及外涂覆等設(shè)備組成[3]。橫移車將鋼管運(yùn)送到指定的輸送輥道上,鋼管沿輸送輥道進(jìn)入外拋丸、纏紙等處理工序,外涂覆完畢的鋼管進(jìn)入水淋室冷卻后,沿輸送輥道進(jìn)入管端打磨等其他工序,完成流程處理過(guò)程,如圖1所示。
2 自控系統(tǒng)工作原理
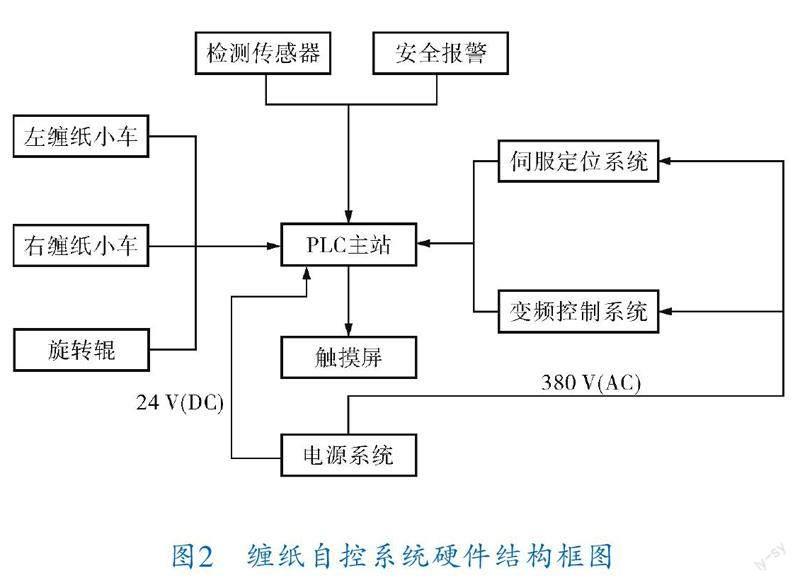
纏紙自控系統(tǒng)硬件結(jié)構(gòu)如圖2所示。纏紙自控系統(tǒng)的自動(dòng)纏紙裝置布置在臺(tái)架的左、右兩側(cè),纏紙工序安裝有旋轉(zhuǎn)輥,經(jīng)外拋丸處理的鋼管,由橫移車從輸送輥道托運(yùn)到纏紙的旋轉(zhuǎn)輥工序,電感式傳感器檢測(cè)到鋼管信號(hào),安全報(bào)警裝置未觸發(fā)的狀態(tài)下,纏紙小車相向而行,到達(dá)管端時(shí)執(zhí)行減速、停止指令,經(jīng)過(guò)纏紙管端精確定位、卷紙自動(dòng)輸送、自動(dòng)纏紙隨動(dòng)等控制后,進(jìn)行纏紙作業(yè),纏紙完畢后,兩側(cè)小車退回到起始點(diǎn)位置,橫移車將鋼管托運(yùn)到下一工序,進(jìn)行下一流程的作業(yè)。
左、右纏紙自控系統(tǒng)設(shè)計(jì)有手動(dòng)控制和自動(dòng)控制兩種模式。自動(dòng)控制模式下,在左、右纏紙小車起點(diǎn)位,當(dāng)橫移車將鋼管放到纏紙旋轉(zhuǎn)輥上,鋼管位置傳感器檢測(cè)到信號(hào)時(shí),PLC程序發(fā)出指令,控制左、右小車相向運(yùn)行;當(dāng)傳感器檢測(cè)到管端時(shí),小車執(zhí)行減速動(dòng)作;當(dāng)纏紙靠輥接觸到鋼管時(shí),小車停止運(yùn)行。水平移動(dòng)平臺(tái)帶動(dòng)纏紙機(jī)構(gòu)向靠近鋼管方向移動(dòng)。V90伺服電機(jī)編碼器實(shí)時(shí)檢測(cè)位移量,根據(jù)鋼管規(guī)格參數(shù),當(dāng)?shù)竭_(dá)設(shè)定位置后,平臺(tái)停止移動(dòng)[4,5]。此時(shí),貼紙輥的氣缸升起,將紙端壓在鋼管外壁,并沿鋼管弧面行走150 mm的弧長(zhǎng)距離,起到將紙端壓在鋼管外表面的作用。
旋轉(zhuǎn)輥帶動(dòng)鋼管旋轉(zhuǎn),放卷裝置帶動(dòng)卷紙盤旋轉(zhuǎn),監(jiān)測(cè)傳感器實(shí)時(shí)檢測(cè)卷紙盤的消耗量,測(cè)長(zhǎng)裝置通過(guò)旋轉(zhuǎn)編碼器測(cè)量紙帶的實(shí)時(shí)長(zhǎng)度。在纏紙自動(dòng)輸送過(guò)程中,膠水噴涂裝置運(yùn)行,將膠水噴涂在紙帶表面,當(dāng)測(cè)長(zhǎng)裝置測(cè)量紙帶長(zhǎng)度達(dá)到設(shè)定值時(shí),切紙裝置開(kāi)始動(dòng)作,將紙帶切斷,放卷裝置停止運(yùn)行。紙帶末端纏上管端后,旋轉(zhuǎn)輥停止旋轉(zhuǎn),完成纏紙過(guò)程。
在自動(dòng)運(yùn)行過(guò)程中,纏紙小車兩側(cè)的安全傳感器檢測(cè)到人員進(jìn)入時(shí),自動(dòng)程序終止,并發(fā)出報(bào)警信息,提示相關(guān)人員及時(shí)處理[6]。
3 硬件組成
3.1 控制器件
控制器件主要為西門子、歐姆龍等控制元件,由歐姆龍光電傳感器檢測(cè)鋼管位置,鏡面反射式安全傳感器檢測(cè)輥道兩側(cè)異常狀態(tài),采用PROFINET主從控制模式。以S7-1215C PLC作為PLC主站,G120變頻器、V90伺服控制器與主站建立通信,實(shí)現(xiàn)采集信號(hào)處理和邏輯運(yùn)算;西門子SM221模塊完成傳感器檢測(cè)信號(hào)的采集[7],并將信號(hào)傳遞給PLC主站;觸摸屏完成設(shè)備運(yùn)行狀態(tài)實(shí)時(shí)顯示及故障報(bào)警功能。
3.2 管端精準(zhǔn)定位裝置
管端精準(zhǔn)定位裝置主要包括:行走小車、水平移動(dòng)平臺(tái)、檢測(cè)傳感器及位移傳感器等。行走小車采用三相異步電動(dòng)機(jī)驅(qū)動(dòng),主要帶動(dòng)纏紙機(jī)構(gòu)沿鋼管軸線方向移動(dòng),到達(dá)指定的纏紙位置。水平移動(dòng)平臺(tái)通過(guò)V90伺服控制器帶動(dòng)托紙輥、吸盤盒等移動(dòng)到指定位置,便于進(jìn)行纏紙動(dòng)作。
3.3 卷紙自動(dòng)輸送裝置
卷紙自動(dòng)輸送裝置主要包括:放卷、測(cè)長(zhǎng)、膠水噴涂及切紙等裝置。放卷采用變頻電動(dòng)機(jī)驅(qū)動(dòng),電機(jī)輸出軸連接氣脹軸,卷紙固定在氣脹軸上,通過(guò)氣動(dòng)脹緊力保證卷紙的穩(wěn)定轉(zhuǎn)動(dòng)。卷紙通過(guò)張力輪自動(dòng)輸送。測(cè)長(zhǎng)裝置通過(guò)旋轉(zhuǎn)編碼器測(cè)量紙帶實(shí)時(shí)長(zhǎng)度,達(dá)到設(shè)定值后,切紙裝置動(dòng)作,將紙帶切割完畢[8,9]。
3.4 自動(dòng)纏紙隨動(dòng)控制裝置
如圖3所示,自動(dòng)纏紙隨動(dòng)控制裝置主要包括:管端位置傳感器、隨動(dòng)伺服機(jī)構(gòu)及軸向移動(dòng)平臺(tái)等。軸向移動(dòng)平臺(tái)上固定有檢測(cè)鋼管端面?zhèn)鞲衅鳎ㄟ^(guò)傳感器檢測(cè)到管端在軸向的位置變化,通過(guò)伺服機(jī)構(gòu)來(lái)控制移動(dòng)平臺(tái)做相應(yīng)伺服移動(dòng),達(dá)到保證管端纏紙寬度在固定參數(shù)的目的,平臺(tái)在軸線方向移動(dòng)機(jī)構(gòu)為直線導(dǎo)軌。
3.5 單機(jī)設(shè)備
在外拋丸出管區(qū)域?yàn)閂型臺(tái)架,由外拋丸后輥道輸送來(lái)的鋼管經(jīng)過(guò)自動(dòng)對(duì)中后,需要將鋼管通過(guò)橫移車運(yùn)送到V型臺(tái)架或纏紙旋轉(zhuǎn)輥上。
3.6 硬件特性
為了避免生產(chǎn)不同規(guī)格鋼管時(shí)頻繁調(diào)整傳感器位置,輥道位置檢測(cè)傳感器采用光電鏡面反射方式,并在輥道末端設(shè)計(jì)雙傳感器信號(hào)觸發(fā)[10],如圖4所示。
在外拋丸輸出輥道有鋼管、V型臺(tái)架鋼管倒運(yùn)到纏紙旋轉(zhuǎn)輥、纏紙旋轉(zhuǎn)輥鋼管倒運(yùn)V型臺(tái)架或輸送輥道等控制需求條件下,優(yōu)先倒運(yùn)外拋丸輸出輥道鋼管,避免外拋丸設(shè)備停機(jī)。
在自動(dòng)運(yùn)行模式下,左、右兩側(cè)纏紙小車沒(méi)有退到原點(diǎn)位置時(shí),禁止橫移車在旋轉(zhuǎn)輥工位升降。橫移車在旋轉(zhuǎn)輥上升托管的使能信號(hào)為上升沿信號(hào),避免誤動(dòng)作,可增強(qiáng)自控系統(tǒng)運(yùn)行的可靠性。
4 軟件開(kāi)發(fā)
鋼管由橫移車放到纏紙旋轉(zhuǎn)輥上后,纏紙小車達(dá)到指定位置,需要經(jīng)過(guò)管端精準(zhǔn)定位、纏紙自動(dòng)輸送、纏紙隨動(dòng)控制等系統(tǒng)實(shí)現(xiàn)自動(dòng)纏紙功能。PLC程序通過(guò)采集傳感器信號(hào)和西門子V90伺服電機(jī)編碼器實(shí)時(shí)數(shù)據(jù),經(jīng)過(guò)邏輯判斷后,控制纏紙機(jī)構(gòu)執(zhí)行相應(yīng)動(dòng)作,從而實(shí)現(xiàn)鋼管管端自動(dòng)纏紙功能,控制流程如圖5所示。
4.1 自動(dòng)控制程序
4.1.1 自動(dòng)纏紙
當(dāng)橫移車將鋼管放到纏紙旋轉(zhuǎn)輥上后,PLC程序通過(guò)采集纏紙小車、定位裝置、輸送裝置等傳感器檢測(cè)信號(hào),經(jīng)過(guò)邏輯判斷后,可確定自動(dòng)纏紙系統(tǒng)是否處于準(zhǔn)備就緒狀態(tài),在自動(dòng)模式下,纏紙小車處于原點(diǎn)位置、紙帶端部處于起始點(diǎn)、涂膠裝置膠水溫度及液位在設(shè)定值范圍內(nèi)且輸送機(jī)構(gòu)均在復(fù)位狀態(tài),東西小車沿鋼管方向相向運(yùn)行,纏紙系統(tǒng)執(zhí)行管端定位、紙帶自動(dòng)輸送及纏紙過(guò)程中的隨動(dòng)控制等程序,當(dāng)測(cè)長(zhǎng)裝置測(cè)量紙帶長(zhǎng)度達(dá)到設(shè)定值時(shí),切紙裝置開(kāi)始動(dòng)作,將紙帶切斷,放卷裝置停止運(yùn)行。紙帶末端纏上管端后,旋轉(zhuǎn)輥停止旋轉(zhuǎn),完成纏紙過(guò)程[11]。采用LAD(梯形圖)語(yǔ)言進(jìn)行編程,控制程序段如圖6所示。
4.1.2 流程交互自動(dòng)控制
將輸送輥道、橫移車等設(shè)備工作狀態(tài)、前后限位、設(shè)備位置采集到PLC程序中,通過(guò)程序?qū)崿F(xiàn)自動(dòng)交互控制(圖7),保證設(shè)備的有序自動(dòng)運(yùn)行。
流程交互自動(dòng)控制的主要控制邏輯為:
a. 輥道上設(shè)置鋼管東端極限保護(hù)限位,當(dāng)超長(zhǎng)管超過(guò)對(duì)中范圍時(shí),鋼管在極限限位處停止,滿足橫移車托管需求。
b. 在自動(dòng)模式下,若V型臺(tái)架及纏紙旋轉(zhuǎn)輥上沒(méi)有鋼管,且纏紙小車處于原點(diǎn)位置,橫移車將輥道上對(duì)中完畢的鋼管托放到纏紙旋轉(zhuǎn)輥上,纏紙小車相向運(yùn)行,執(zhí)行纏紙動(dòng)作。若V型臺(tái)架及纏紙旋轉(zhuǎn)輥上有鋼管,通過(guò)PLC程序邏輯判斷,橫移車將鋼管放到V型臺(tái)架上。
c. 纏紙完畢后,纏紙小車后退到原點(diǎn),經(jīng)過(guò)程序運(yùn)算處理,橫移車將纏紙完畢的鋼管放到纏紙后V型臺(tái)架或輸送輥道上,并將V型臺(tái)架或外拋丸出管輥道上鋼管放到纏紙旋轉(zhuǎn)輥上,完成流程交互控制。
4.2 觸摸屏軟件編程
觸摸屏具有方便直觀、圖像清晰、堅(jiān)固耐用及節(jié)省空間等優(yōu)點(diǎn),操作者只要用手觸碰顯示屏上的圖符或文字就能實(shí)現(xiàn)對(duì)系統(tǒng)的操控,擺脫了鍵盤和鼠標(biāo)操作,從而提高了設(shè)備的可操作性、安全性和便捷性。
該系統(tǒng)采用SIMATIC KTP900觸摸屏實(shí)現(xiàn)與PLC的交互通信、狀態(tài)顯示、故障報(bào)警等功能。
采用博途軟件對(duì)其進(jìn)行組態(tài),PLC與觸摸屏采用PROFINET通信方式。
該控制系統(tǒng)中,設(shè)計(jì)觸摸屏用于實(shí)現(xiàn)自動(dòng)纏紙的參數(shù)設(shè)置、設(shè)備運(yùn)行狀態(tài)的顯示以及纏紙過(guò)程中數(shù)據(jù)的統(tǒng)計(jì)和查詢功能。通過(guò)參數(shù)設(shè)置,實(shí)現(xiàn)纏紙過(guò)程中不同規(guī)格鋼管工藝要求的自動(dòng)控制。
在纏紙PLC系統(tǒng)組態(tài)配置界面中,添加SM221、SM222等模塊實(shí)現(xiàn)自動(dòng)纏紙動(dòng)作功能的控制;添加V90伺服控制器分站、G120變頻器分站GSD文件并配置I/O變量、網(wǎng)絡(luò)地址等參數(shù)以實(shí)現(xiàn)控制器與PLC主站的PROFINET通信;左、右小車的1214C PLC系統(tǒng)通過(guò)SCALANCE XB008工業(yè)交換機(jī)實(shí)現(xiàn)交互通信[12,13]。配置好的軟件界面如圖8所示。
觸摸屏上參數(shù)設(shè)置完后,觸摸屏與PLC系統(tǒng)通過(guò)PROFINET協(xié)議建立通信,將參數(shù)值寫(xiě)入PLC系統(tǒng)中,根據(jù)參數(shù)值執(zhí)行相應(yīng)邏輯控制,設(shè)備的運(yùn)行狀態(tài)和報(bào)警信息在觸摸屏上顯示(圖9)。
5 應(yīng)用效果
自動(dòng)纏紙控制系統(tǒng)投運(yùn)前、后,工作方式、參數(shù)與應(yīng)用效果的對(duì)比見(jiàn)表1。
系統(tǒng)上線運(yùn)行后,實(shí)現(xiàn)了鋼管外涂覆前管端自動(dòng)纏紙,工序間輥道、橫移車的自動(dòng)交互;實(shí)現(xiàn)纏紙區(qū)域流程自動(dòng)控制功能,減少了崗位數(shù)量,提高了區(qū)域自動(dòng)化水平和生產(chǎn)效率,并降低了防腐質(zhì)量風(fēng)險(xiǎn)。
6 結(jié)束語(yǔ)
纏紙流程自控系統(tǒng)的上線運(yùn)行,打破了設(shè)備孤島,實(shí)現(xiàn)鋼管外涂覆前區(qū)域過(guò)程控制的自動(dòng)化和可視化,提高了產(chǎn)品的一致性,優(yōu)化了崗位設(shè)置,降低生產(chǎn)成本和防腐質(zhì)量風(fēng)險(xiǎn),實(shí)現(xiàn)了提質(zhì)增效,具有良好的經(jīng)濟(jì)效益和社會(huì)效益。
在鋼管防腐行業(yè),通過(guò)鋼管管端精確定位技術(shù)、卷紙自動(dòng)輸送技術(shù)和自動(dòng)纏紙過(guò)程中的隨動(dòng)控制技術(shù),實(shí)現(xiàn)防腐鋼管管端自動(dòng)纏紙功能,代替人工纏紙,為行業(yè)內(nèi)裝備制造能力提升提供借鑒思路;開(kāi)發(fā)區(qū)域內(nèi)自動(dòng)纏紙系統(tǒng)與鋼管輸送設(shè)備的智能交互控制算法,形成外涂覆前區(qū)域自動(dòng)化流水線生產(chǎn)模式,提高了鋼管防腐質(zhì)量管控能力,助力推進(jìn)鋼管防腐過(guò)程中智能制造進(jìn)程。
參 考 文 獻(xiàn)
[1] 李和平.現(xiàn)代精細(xì)化工生產(chǎn)工藝流程圖解[M].北京:化學(xué)工業(yè)出版社,2014.
[2] 馬凱,肖洪流.自動(dòng)化生產(chǎn)線技術(shù)[M].北京:化學(xué)工業(yè)出版社,2017.
[3] 中華人民共和國(guó)住房和城鄉(xiāng)建設(shè)部,中華人民共和國(guó)國(guó)家質(zhì)量監(jiān)督檢驗(yàn)檢疫總局.管道外防腐補(bǔ)口技術(shù)規(guī)范:GB/T 51241—2017[S].北京:中國(guó)計(jì)劃出版社,2018.
[4] 趙晶,黃韜.運(yùn)動(dòng)控制系統(tǒng)原理及應(yīng)用[M].北京:化學(xué)工業(yè)出版社,2020.
[5] 黃風(fēng).運(yùn)動(dòng)控制器與交流伺服系統(tǒng)的調(diào)試和應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2021.
[6] 李運(yùn)華.安全生產(chǎn)事故隱患排查實(shí)用手冊(cè)[M].北京:化學(xué)工業(yè)出版社,2012.
[7] 魏克新.西門子S7-1200/1500PLC學(xué)習(xí)手冊(cè)[M].北京:化學(xué)工業(yè)出版社,2018.
[8] 馬明建.數(shù)據(jù)采集與處理技術(shù)[M].西安:西安交通大學(xué)出版社,2012.
[9] 左維,陳昌安.西門子數(shù)控系統(tǒng)結(jié)構(gòu)及應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2020.
[10] 周潤(rùn)景,李茂泉,董海波.常用傳感器技術(shù)及應(yīng)用[M].北京:電子工業(yè)出版社,2020.
[11] 魏克新.自動(dòng)控制綜合應(yīng)用技術(shù)[M].北京:化學(xué)工業(yè)出版社,2012.
[12] 王建.觸摸屏實(shí)用技術(shù)[M].北京:機(jī)械工業(yè)出版社,2012.
[13] 蔡皖東.工業(yè)以太網(wǎng)技術(shù)[M].北京:電子工業(yè)出版社,2020.
(收稿日期:2022-06-21,修回日期:2023-05-07)
