機翼型閘墩量水閘門自動測流系統研發
2023-08-09 09:33:28王世隆王文娥劉政光陳土成劉渡坤胡笑濤
灌溉排水學報 2023年7期
王世隆,王文娥,劉政光,陳土成,劉渡坤,胡笑濤
(西北農林科技大學 旱區農業水土工程教育部重點實驗室,陜西 楊凌712100)
0 引 言
【研究意義】灌區量水是促進節水農業發展、提高灌溉水利用率的一項基礎性、關鍵性技術[1],渠系流量自動化測量是實現灌區現代化的關鍵。但目前我國灌區渠系測流系統不配套,特別是小型渠道自動測流系統匱乏,急需研發測流精度高、適用性強的自動測流系統[1-3]。【研究進展】目前,灌區干支渠流量測量技術比較成熟、測流設施較完善,但由于斗渠及以下渠道數量大、類型復雜、費用較高等原因,量水設施建設程度不高。為了促進灌區現代化管理水平,我國從20 世紀50 年代就開始引進及研發渠系量水設施,目前量水設施超過百余種,如巴歇爾量水槽[4]、直壁式量水槽[5]、長喉道量水槽[6]、機翼形量水槽[7]等,均具有較高的測流精度,但不具備控制流量、調節渠道流量的作用。節制閘和分水閘是常見的渠系建筑物,具有調節渠道水位和流量的功能,閘門還具備測量流量的功能[8],可以利用渠系閘門實現流量的測量與調控。隨著量測技術和自動化技術的發展,關于渠道自動化測控設施的研發已成為熱點。Goel 等[9]研發出一種在自由流和淹沒流下都可使用的流量計。Michalski等[10]提出應用超聲波法測量流量的思路,并說明了測流的誤差來源以及對精度的影響。張從鵬等[11]設計了一種遠程自動控制計量閘門系統,包含基于ARM 的主控與存儲電路、液晶顯示屏模塊等硬件平臺;王家琪等[12]將自動化測控與矩形薄壁量水堰結合,設計出水頭可調的測控一體的量水堰;林俊[13]將上下游水位測量和閘門控制結合測流,采用PIC 系列單片機作為遠程終端控制處理器,通過室內試驗擬合閘孔出流流量系數公式;王啟飛等[14]研發出測控一體化閘門系統,在閘門后安置巴歇爾量水槽測流,根據流量需求調節閘門開度進而控制干、支渠分流量。韓宇等[15]針對弧形底部渠道流速分布特征,推導流速傳感器特征測點的位置表達式,提高了弧底渠道測流精度。【切入點】前人的研究多集中在閘門測控設計方面,關于閘墩體型對于閘門測流的影響研究較少。利用平板閘門量水具有無二次水頭損失和可控制流量的優點,但是在閘門全開時,閘門的閘墩型式會對測流精度產生影響,當閘門開度較大時會形成堰流,導致測流精度降低。將量水槽體型曲線應用在閘墩上,在閘門開度較大時可利用閘墩形式的量水槽測流,既減少了局部水頭損失又提高了測流精度。機翼形量水槽的試驗研究和實際應用已有很多,而且已完成了標準化和系列化工作[15-18]。陳土成等[19]將機翼形量水槽改造作為平板閘門的閘墩,形成流量測控一體裝置,命名為機翼型閘墩量水閘門,通過試驗分析其水力性能,可為系列化開發提供理論基礎。但機翼型閘墩量水閘門尚未實現流量自動測量。【擬解決的關鍵問題】因此,本文選取機翼型閘墩量水閘門作為流量測控一體量水設施,在明確其測流原理的基礎上,應用超聲波傳感技術收集水位和閘門開度信息,以STC89C51RC 為核心處理運算,研發渠系自動測流系統,可用于灌區渠系水位流量等信息的自動測量與控制。
1 渠系自動測流系統設計
為了實現渠系流量自動測量,渠系自動測流系統包括流量測量設施、數據處理與通訊設施及動力設施3 個主要組成部分。其中水位流量測量設施為現地設備,由量水設施、水位傳感器、閘門開度傳感器構成;信息處理與通訊設施包超聲波測距模塊、數碼顯示模塊和程序下載模塊等;動力設施包括光伏板、蓄電池等,測流設施如圖1 所示。該系統可實現渠道水位測量、瞬時流量計算、累計水量計算、數據傳輸、電源供電等功能。

圖1 測流設施示意圖Fig.1 Schematic diagram of flow measuring facilities
1.1 流量測量設施設計
利用渠系上的閘門測流時,在閘墩和閘門的作用下,水位及閘門開度不同時,閘門對水流控制作用不同,會形成閘孔出流及堰流。常見的分水閘及節制閘的閘墩結構簡單,形成堰流時不具備較高精度的測流條件。由于機翼形量水槽具有測流精度高且水頭損失小,本文提出采用機翼形量水槽作為閘墩,結合直升式矩形平板閘門組成機翼型閘墩量水閘門測流設施(圖1),在閘門開度較大形成堰流時利用閘墩量水,閘門開度較小時為閘孔出流。由能量方程和恒定總流的連續性方程推導,可得自由出流流量計算式為:
式中:Q為過閘流量(L/s);b為過流寬度(cm);e為閘門開度(cm);H為閘門上游穩定處水位(cm);g 為重力加速度,取9.81 m/s2;μ為閘孔自由出流的流量系數。
當閘門下游水深影響上游出流時形成淹沒出流。淹沒出流下的流量計算式為:
式中:m為淹沒出流流量系數;H為閘門上游穩定處水位(cm);ht為閘門下游穩定處水位(cm)。
當閘門開度較大,水流脫離閘門底緣時,閘門失去約束作用,水面連續降落,閘孔出流轉化為堰流,可用量水槽測流。機翼形量水槽通過束窄過水斷面使得水流勢能轉化為動能,在喉口斷面附近形成臨界流,通過測量上游水位即可求得流量,具有穩定的水位-流量關系。根據已有研究,機翼形量水槽的流量公式[15]:
式中:a、n為經驗系數,需要通過模型試驗得出;Bc為量水槽喉口寬度(cm);HL為量水槽上游穩定水位(cm)。根據以上測流原理可知,通過測量閘門開度e、閘門上游水深H及下游水深ht,判斷是閘孔出流還是堰流、自由出流還是淹沒出流,確定流量系數及淹沒系數,即可得到通過設施的流量,因此需要建立機翼型閘墩量水在閘孔出流及堰流條件下的流量系數及淹沒系數。
1.2 流量公式
為擬合堰流和閘孔出流流量系數公式,在矩形渠道上進行測流試驗。矩形渠道寬0.6 m,深0.3 m,長12 m,采用水泥抹面,糙率n為0.013。渠身為預制混凝土,底部砌磚作為支撐,接縫處采用水泥防滲。為保證渠道有較大的過流范圍,選擇收縮比為0.58的機翼形量水槽作為閘墩,翼長60 cm,翼高12.6 cm。平板閘門長34.8 cm,寬30 cm。閘門上下游水位采用精度為±1 mm 的SCM60 型測針進行測量,渠道流量由電磁流量計測量。試驗系統由潛水泵、蓄水池、電磁流量計、穩水池、矩形渠道槽、尾閥和回水渠道組成。試驗現場布設和整體設計如圖2 所示。試驗設置閘門開度變化范圍5~14 cm,變化梯度1~2 cm,選定流量范圍10~60 L/s,變化梯度2~5 L/s。
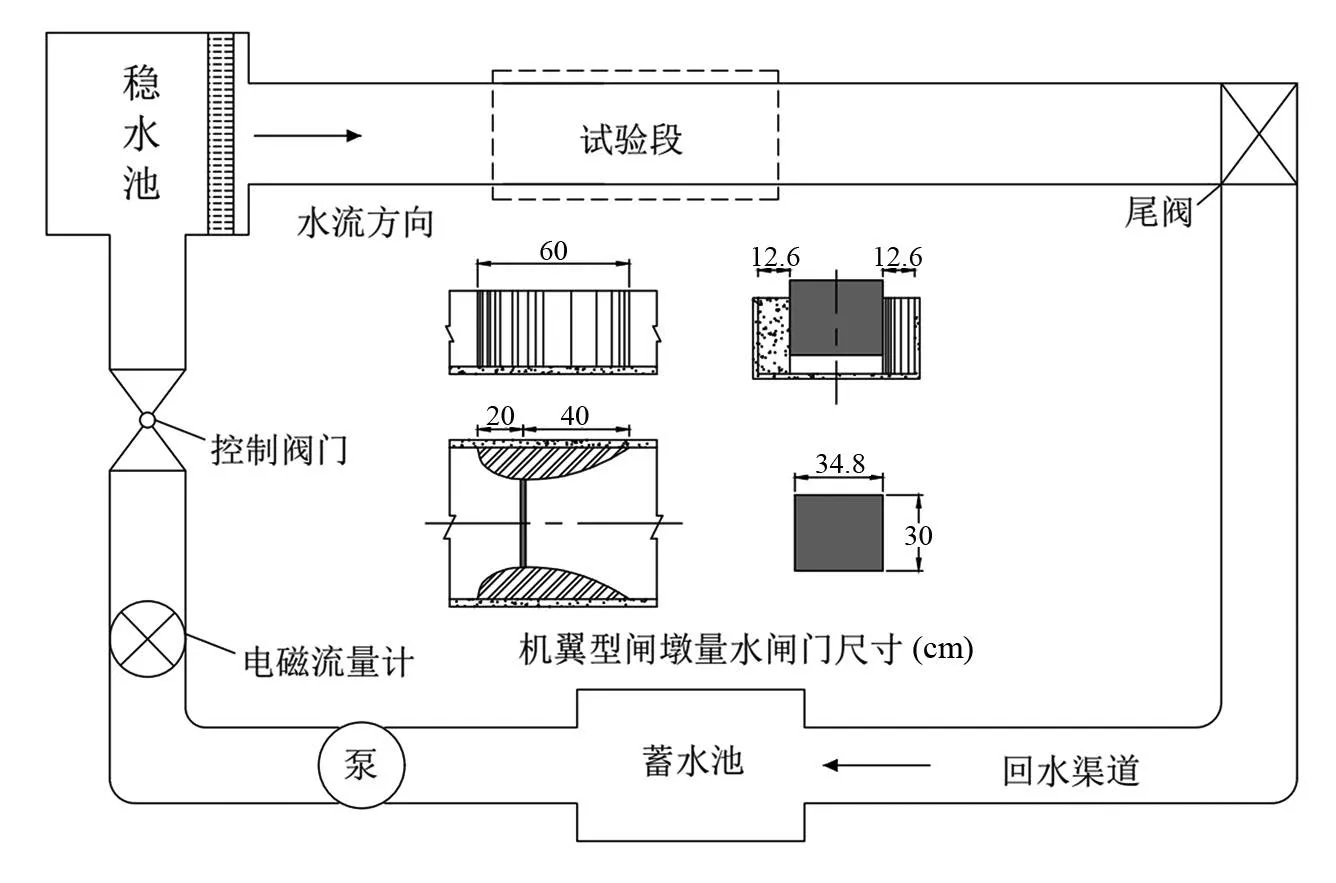
圖2 試驗布置Fig.2 Layout of the experimental setup
1.2.1 閘孔出流
閘孔自由出流流量公式的形式已確定,流量Q、閘門開度e和上游水位H均可測量得到,代入式(1)求得流量系數μ。擬合自由出流各流量下的相對開度與流量系數,得到自由出流流量系數與相對開度的關系式:
自由出流流量系數μ都隨著閘門相對開度的增大而減小,在相同流量下,閘門開度越大上游水深越小。由復相關系數R2=0.951 可知相關性良好。
在試驗中調節渠道尾門改變下游水深,當影響到上游水深時,即形成淹沒出流,此時除了測量上游水深之外,還需要測量下游水面較穩定處的水深,過閘流量與上下游水深有關。與自由出流類似,將試驗中測得的Q、e和ΔH代入式(2)即可得出淹沒出流下的流量系數m,擬合得到m的表達式為:
R2=0.919 相關性較好,可以看出,淹沒出流流量系數隨閘門相對開度增大而增大。將閘門下游穩定處水位ht與閘門上游穩定處水位H之比定義為淹沒度,根據不同閘門開度下的淹沒度判斷當前是否為淹沒出流。分析試驗數據得知,不同閘門開度范圍下的淹沒出流條件為:
隨著閘門開度的增大,需要更大的淹沒度才能達到淹沒出流。當滿足以上條件時,按式(2)和式(5)計算過閘流量,否則按式(1)和式(4)計算。
1.2.2 堰流
試驗中調整閘門開度,使水流脫離閘門底緣,形成堰流。以機翼形量水槽作為測流設施,測得上游水深,與渠道流量擬合,得出機翼形量水槽測流公式:
R2=0.999 7,相關性極好。在堰流狀態下,流量隨水深增大而增大,而且水深越大對流量的影響也越大。式中,HL為上游穩定處水位(cm),渠道流量Q(L/s)。將擬合的閘孔出流流量公式計算值與試驗實測值相比,吻合度較高,如圖3 所示,其中自由出流和淹沒出流下相對誤差絕對值的最大值分別為2.98%、4.92%,最小分別為0.01%、0.04%,平均誤差為0.85%、1.25%,表明機翼型閘墩量水閘門具有較高的測流精度,符合灌區渠道量水要求。
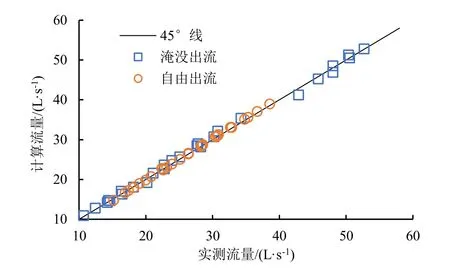
圖3 實測流量與計算流量對比Fig.3 Comparison of measured discharge and calculated discharge
1.3 孔堰流形態判別閾值
機翼型閘墩量水閘門有堰流和閘孔出流兩種形態。閘孔出流與堰流的測流公式不同,形態判別對測流精度有重要影響。閘前水位下降,閘門開度增大時,水流逐漸脫離閘門底緣,在機翼形量水槽的束窄作用下,收縮段渠道中線水深略有壅高,將水流即將脫離閘門底緣的狀態稱為臨界狀態。閘門為平底坎時,一般認為閘門相對開度e/H>0.65 為堰流,e/H≤0.65 為閘孔出流,判別閾值受到閘門、閘墩及底坎形式的影響[20-21]。張敬樓[22]認為以0.65 為界較為粗略,沒有考慮底坎高低和形狀以及閘門布置形式等因素。閘底坎和閘墩形式的改變都會影響判別閾值,邱勇等[23]分析了駝峰堰和WES 堰形的孔堰流判別閾值,隨著閘門開度和流量的增大,判別閾值逐漸增大;李紅等[8]研究發現,梯形渠道平板節制閘的孔堰流判別閾值在0.78~0.81 之間,隨主渠道流量增大而增大。機翼型閘墩量水閘門的判別閾值有類似的規律。水流流過機翼型閘墩量水閘門時,過流斷面先逐漸收縮再擴散,在閘門前端的收縮段處受到閘門擋水和閘墩收縮的影響,渠道中線水位升高,使得臨界狀態下的閘門開度略有抬升,臨界開度相應增大,導致判別閾值發生變化。試驗過程中通過調節閘門開度和渠道流量,記錄臨界狀態下的各數值如表1 所示。渠道過流量為10~60 L/s 時,臨界相對開度值發生變化,不再是0.65,而是在0.77~0.82 之間變化,平均值為0.80,在流量大于10 L/s 時,相對開度臨界值隨著流量的增大小幅度上升。

表1 臨界狀態下相對開度值Table 1 Relative opening value at critical state
2 信息處理與通訊設施
根據測流原理及流量計算公式,在閘門上下游和頂部安設超聲波傳感器,將采集的距離信息進一步處理計算得到閘門上下游水位和閘門開度,通過內置軟件計算輸出渠道實時流量。
2.1 系統設計框架
本測流系統主要由包含以下模塊:供電模塊、程序下載模塊、超聲波測距模塊、數碼顯示模塊。以STC89C51RC 單片機為核心采集距離信息,經處理輸出水位、流量信息。系統控制單元結構框圖如圖4 所示。
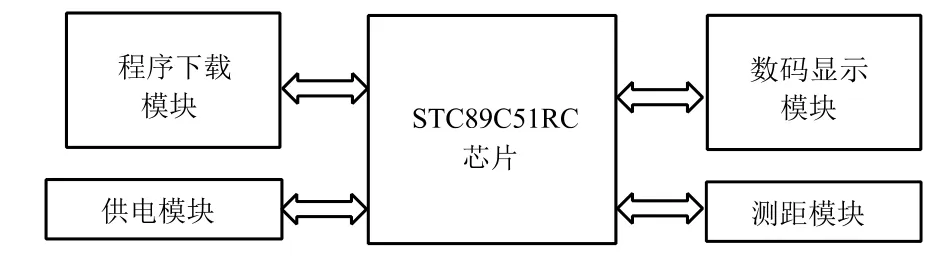
圖4 系統結構框圖Fig.4 Diagram of system structure
2.2 主芯片電路
本測流裝置采用STC89C51RC 為主控芯片。STC89C51RC 芯片共包含4 組8 位并行端口,其低功耗模式掉電<0.1 μA,可外中斷或專用定時器喚醒,2個16 位定時器。時鐘電路方面,設置一個振蕩頻率11.059 2 MHz 的晶振,并外接2 個22PF 電容。為保證裝置運行穩定,需要設置復位電路,無論系統當前處于何種狀態,按下復位按鍵即可恢復到初始狀態。單片機通過端口驅動傳感器工作或實現其他功能[24],P3.0 端口和P3.1 端口用來下載程序,P1.2~P1.7 端口驅動3 個超聲波傳感器,P0.0~P0.7 端口和P2.5~P2.7端口驅動顯示屏LCD1602。主芯片引及晶振電路如圖5 所示,復位電路圖如圖6 所示。

圖5 主芯片電路圖Fig.5 Circuit diagram of the chip
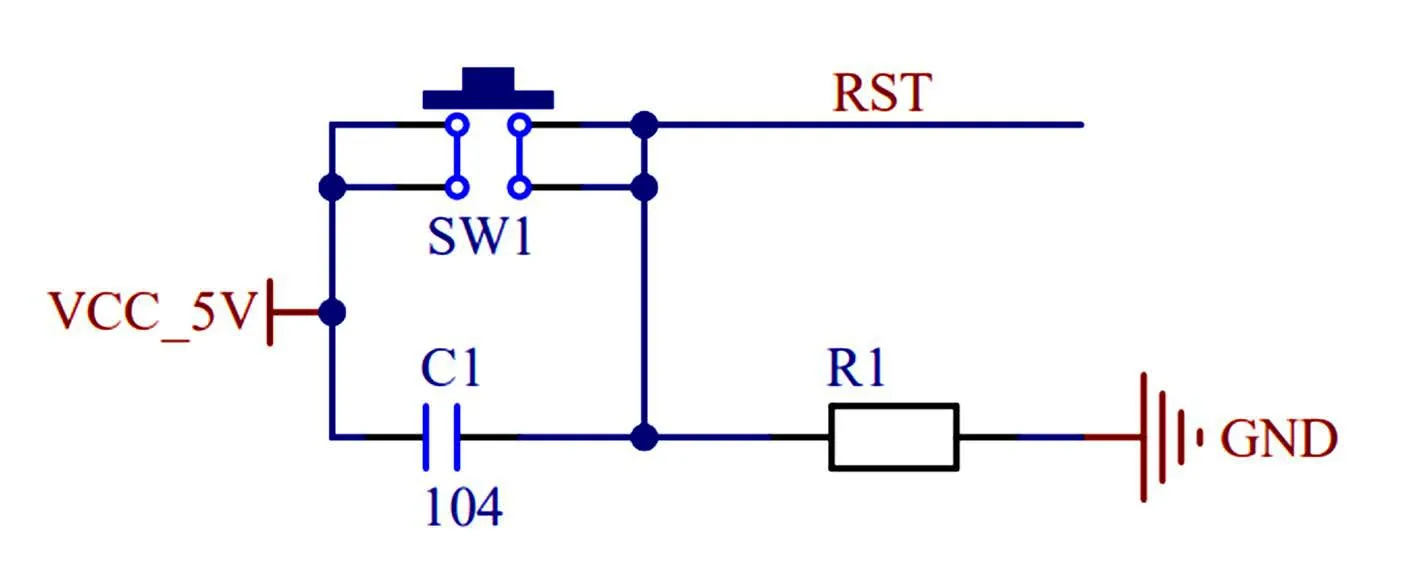
圖6 復位電路圖Fig.6 Reset circuit diagram
2.3 超聲波測距模塊
利用機翼型閘墩量水閘門測流,首先需要根據測得的上游水位和閘門開度判斷當前形態,再應用流量公式計算出當前渠道流量。超聲波測距作為一種非接觸式測距方式,通過發射和接收超聲波脈沖的時間間隔計算出目標物體與傳感器之間的距離,適用于水位和閘門開度的測量。HC-SR04 超聲波傳感器測距模塊可提供2~400 cm 的非接觸式距離感測功能,測距精度可達3 mm,受光照、電測波等干擾較小,適用于渠道水位測量采集。HC-SR04 超聲波模塊包含2 個通用的壓電陶瓷超聲傳感器,分別用來發出和接收超聲波信號。為了將信號穩定地傳輸到單片機,需要用外圍信號放大器提高發出信號的功率。模塊有4 個引腳,VCC、TRIG(控制端)、ECHO(接收端)、GND,其中VCC接5 V電源,TRIG控制發出超聲波信號,ECHO接收反射回的超聲波信號,連接電路如圖7 所示。
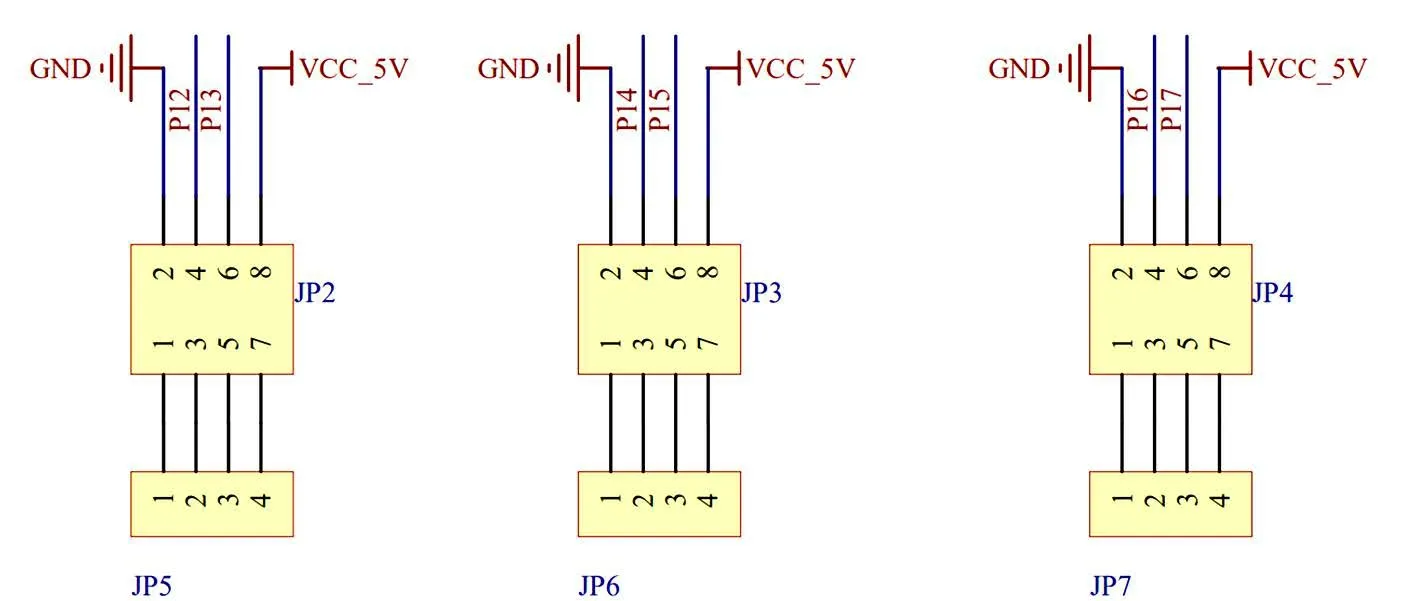
圖7 超聲波傳感器電路圖Fig.7 Circuit diagram of ultrasonic sensor
模塊采用IO 口TRIG 觸發測距,當有一個大于10 μs 脈沖觸發信號時,模塊內部自動發送8 個40 kHz的方波,自動檢測是否有信號返回;有信號返回,通過IO 口ECHO 輸出一個高電平,用計時器記錄高電平持續的時間,即信號從發射到接收的時間[25]。測量距離按式(8)計算。
式中:Δh為超聲波傳感器到待測物表面的垂直距離(m);t為高電平持續時間(s);v為超聲波傳播速度,取340 m/s。采集到超聲波傳感器測得距離信息后,為獲得相應的水位及閘門開度,按式(9)換算:
式中:對于超聲波傳感器1 和傳感器3,H0為傳感器與渠道底部的垂直距離(m),對于超聲波傳感器2,H0為閘門閉合狀態下,傳感器與閘門頂部的垂直距離(m)。在測流過程中,超聲波傳感器1、傳感器3 用來測量閘門上下游穩定水面的斷面水深,分別需要安裝在閘門上游2~3 倍的渠道深度及下游3~4 倍渠道深度處。超聲波傳感器2 則需安裝在平板閘門頂部上方超過1.2 倍的閘門高度處。根據試驗情況,確定超聲波傳感器1、傳感器3 分別安裝在閘門上下游0.8 m 和1.2 m 處,閘門閉合狀態下,超聲波傳感器2 安裝在閘門頂部上方0.36 m 處。
2.4 數碼顯示模塊
本測流系統主要顯示閘門上下游水位、開度及渠道流量信息,占用空間較小,為減小功耗,顯示模塊選取LCD1602 顯示屏。LCD1602 是一種字符型液晶顯示模塊,具有輻射低,抗干擾,體積小,功耗低的優點。LCD 電路圖如圖8 所示。
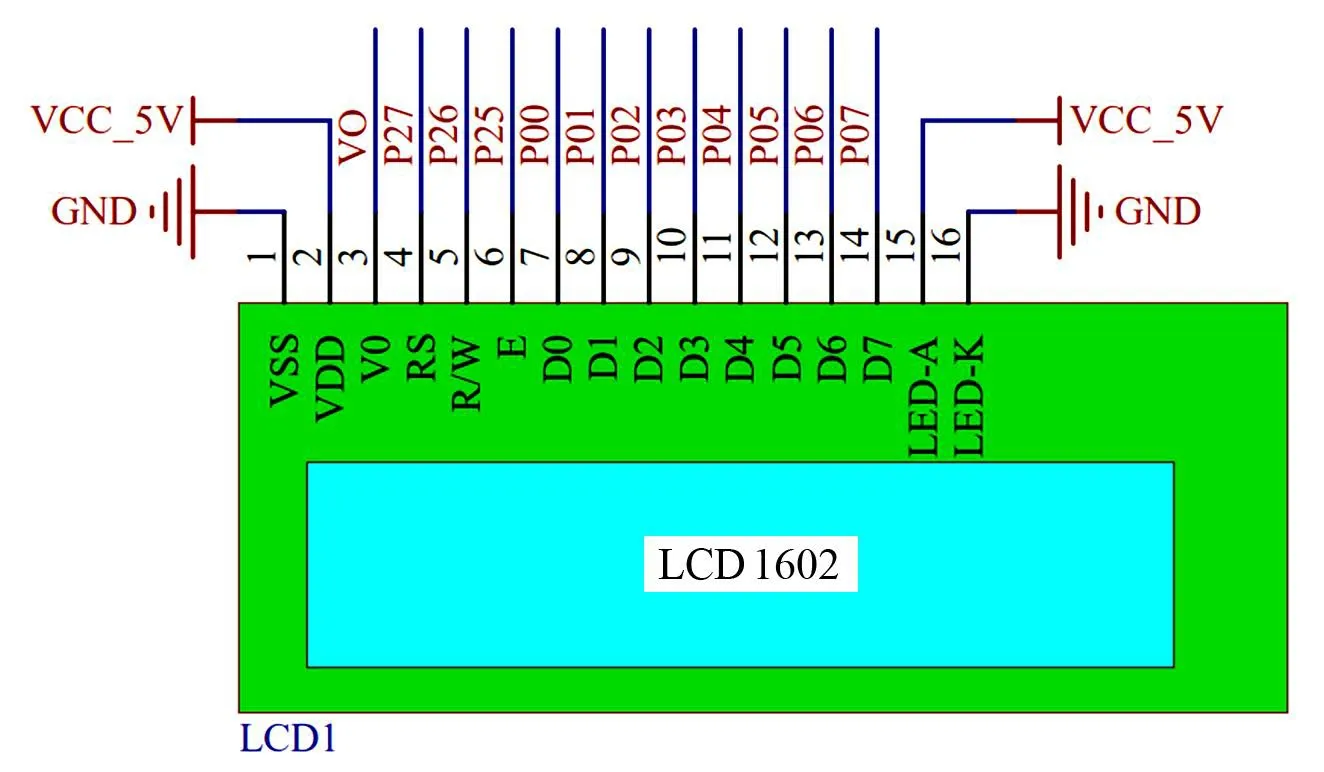
圖8 LCD1602 電路圖Fig.8 Circuit diagram of LCD1602
2.5 軟件設計
裝置軟件在Keil uVision5 中采用C 語言開發。程序編寫完畢后,可使用STC_ISP_V6 軟件下載到單片機中。首先,給裝置供電,發送讀取脈沖,分別獲取3 個超聲波傳感器的測量距離并保存,等待后續處理,然后進行顯示屏初始化,對已采集的距離信息作初步判斷輸出到顯示屏上,3 個傳感器輸出距離的時間間隔為100 ms;根據傳感器布設高度換算出對應的水位和開度信息,判斷當前水位是否在渠道運行狀況設定合理的水位范圍之內;根據閘門開度和水位判斷是否為堰流,若為閘孔出流則需根據淹沒度進一步判斷是否為淹沒出流,然后計算不同出流狀態下的流量系數及過閘流量,最后將流量值輸出到顯示屏。系統軟件流程圖如圖9 所示。
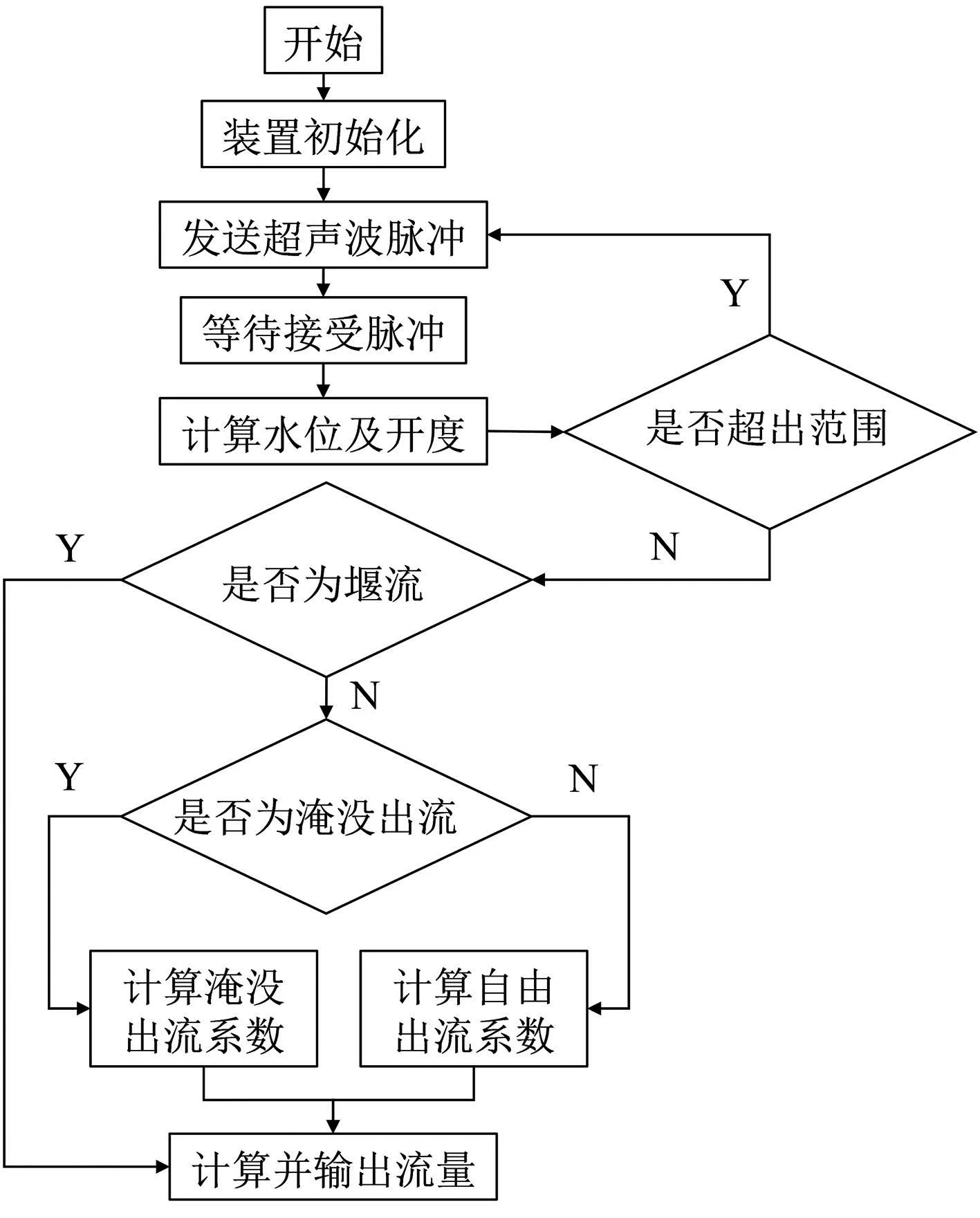
圖9 軟件流程圖Fig.9 Software flow diagram
2.6 動力設施
動力設施包括光伏板、蓄電池等。考慮到灌區渠道閘門多在野外運行,而且灌水期持續時間不定,不宜采用市電,因此本系統采用蓄電池組和太陽能光伏板組合裝置供電。使用24 V 蓄電池作為整個系統的總電源,太陽能光伏板進行充放電管理,通過電源轉換模塊轉換成5 V 給傳感器模塊、數碼顯示模塊等供電,所采用的電壓轉換芯片為 LM2576 系列的LM2576HV-ADJ,其是降壓型開關電壓調節器,具備良好的線性和負載調節能力,改變內部電路的電阻值改變輸出電壓,可固定輸出3.3、5 V 和12 V 電壓[13]。
2.7 性能測試
在上述矩形試驗渠道內檢驗測流裝置的可靠性,將3 個超聲波傳感器分別用橫桿固定,安設在閘門上游、閘門頂端以及閘門下游相應位置,開啟水泵供水,調整閘門至合適開度,調節渠道尾閥,形成自由出流,等待顯示屏上數據穩定再讀數,并記錄同一時刻下的電磁流量計讀數;再次調節尾閥,抬升下游水位形成淹沒出流,讀取測流裝置和電磁流量計流量數值;調整渠道控制閥門,改變渠道來流量,重復上述過程。將測流裝置與電磁流量計計算的流量值相比,結果如表2 所示,不同開度下的流量值均較為接近,最大相對誤差為6.19%,最小僅為0.30%,表明自動測流裝置可靠性較高,滿足灌區末級渠道的量水需求。
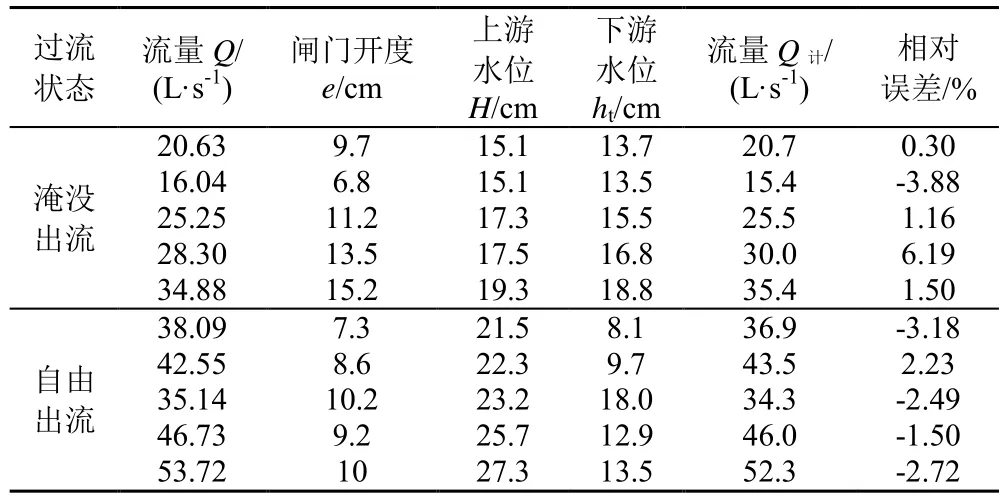
表2 測流裝置水位流量測量值Table 2 Measurement value of water level and flowrate of measuring device
3 討 論
在矩形渠道中,閘門量水和量水槽量水兩種方法均非常成熟,對于閘門流量計算模型和量水槽水力性能研究已較為完善[26-27]。閘門結構簡單、制作方便,還具有量水和控制流量的優點,但是在閘門全開且形成堰流的情況下,傳統閘墩不具備測流功能。機翼形量水槽量水精度高、水頭損失小,在灌區已進行推廣使用,目前的研究方向主要為體形曲線的進一步優化[28]。機翼型閘墩量水閘門結合2 種量水方法的優點,閘門開度較大時閘墩具有量水槽的測流功能,在不同條件下均具有較高的測流精度,同時也具有流量控制功能,并進一步開發配套的自動測流系統,實現無人測流。與矩形渠道的其他量水設施對比,測流精度均比較接近。李偉等[29]進行4 種不同體形量水槽的模擬研究,公式計算流量值與模擬流量值平均誤差為2.42%;賀夢楊等[30]研究便攜式仿機翼形量水槽在矩形渠道中的水力性能,收縮比0.709 時的平均誤差為4.91%;孫斌等[31]應用量綱分析和能量守恒原理建立不同底坡的無喉道量水槽測流公式,平均誤差為3.16%、4.79%。由以上研究可知,量水槽體形曲線、收縮比和渠道底坡均對流量測量產生影響,流線型的體形曲線能減小水頭損失,適當的收縮比可以提高測流范圍并減小壅水高度。另外,平板閘門的位置在閘墩不同位置會改變閘門的過流寬度,進而影響流量公式,不同量水槽作閘墩時閘門的位置可能會有不同,需要進一步研究。本文通過室內模型試驗研究了機翼型閘墩量水閘門在矩形渠道的測流原理,不同渠道形狀下應對閘墩結構進行改造,機翼形量水槽在U 形渠道[32]和梯形渠道[33]中已有相關研究,可參考其中的布置形式。在實際應用中安置平板閘門時應在閘墩喉口處預留門槽。后續應針對不同閘墩曲線、收縮比、渠道形狀和坡度下量水閘門測控系統進行研發。
4 結 論
1)機翼型閘墩量水閘門由機翼形量水槽和矩形平板閘門組成,測流原理是閘孔出流和堰流,在閘門底緣接觸水流導致流線不連續時形成閘孔出流,當閘門開度較大時失去對水流的約束作用時形成堰流。臨界相對開度為0.77~0.82。
2)在矩形渠道上選取收縮比為0.58 的機翼型閘墩進行試驗,擬合出閘孔出流和堰流的測流公式,分析孔堰流判別閾值變化,公式的計算值與電磁流量計測值相比,相對誤差在5%以內。
3)以STC89C51RC 為核心研發自動測流系統,采用蓄電池組和太陽能光伏板提供動力,利用超聲波傳感器測得水位及閘門開度值,判斷過流形式,計算當前渠道過流量,輸出到LCD 顯示屏上。裝置計算值和電磁流量計數值均較為接近,最大相對誤差為6.19%,最小為0.30%。
(作者聲明本文無實際或潛在的利益沖突)