純電動輕型載貨汽車整車質(zhì)量的估算及應(yīng)用
2023-08-14 10:36:02林玉敏魏廣杰游道亮陳劍龔俊奇
汽車工程師 2023年8期
林玉敏 魏廣杰 游道亮 陳劍 龔俊奇
(江鈴汽車股份有限公司,南昌 330031)
1 前言
商用車整車質(zhì)量的準(zhǔn)確獲取對了解實際使用工況、實現(xiàn)制動能量回收、優(yōu)化剩余里程、監(jiān)控貨物實時質(zhì)量、超載報警等具有重要意義。加裝稱重傳感器獲取整車質(zhì)量成本高昂,因此有必要通過算法對整車質(zhì)量進(jìn)行估算。
蘇慶列等[1]使用卡爾曼濾波對整車質(zhì)量和道路坡度進(jìn)行估計,但僅在Simulink/CarSim 環(huán)境中進(jìn)行了仿真分析,未得到實際整車估算結(jié)果。褚文博等[2]利用遞歸最小二乘法對整車質(zhì)量進(jìn)行估算,但忽略了風(fēng)阻、滾動阻力及道路坡度的影響,估算精度有限。同時,卡爾曼濾波更適用于道路坡度估算,而遞推最小二乘法更適用于整車質(zhì)量估算[3]。
本文對純電動輕型載貨汽車的整車質(zhì)量估算進(jìn)行研究,使用卡爾曼濾波算法估算坡度,采用遞推最小二乘法估算整車質(zhì)量,通過實車標(biāo)定和測試進(jìn)行驗證,同時利用估算出的整車質(zhì)量進(jìn)行滑行能量回收策略設(shè)計,并使用CRUISE 基于中國重型商用車瞬時態(tài)循環(huán)(China-World Transient Vehicle Cycle,C-WTVC)工況進(jìn)行仿真分析,對比能耗優(yōu)化貢獻(xiàn)度。
2 整車質(zhì)量和道路坡度理論計算
根據(jù)汽車行駛方程式[4],可得:
式中,F(xiàn)Acc為加速阻力;FDRIVE為驅(qū)動力;FAir為空氣阻力;FRoll為滾動阻力;FHill為坡道阻力;fInertia為整車慣性參數(shù);mCoG為整車質(zhì)量;aCoG為采集的縱向加速度;TEM為電機(jī)扭矩;igear為變速器速比;idiff為主傳動比;rstat為輪胎半徑;cAir為空氣阻力系數(shù);AFront為迎風(fēng)面積;ρAir為空氣密度;α為坡道角度;vCoG為整車車速;fR為滾動阻力系數(shù);FN為地面法向反作用力;FG為車輛重力。
根據(jù)上述公式,可以推導(dǎo)得到整車質(zhì)量mCoG:
其中,道路坡度角度α可計算為:
即
式中,ω為輪速。
3 整車質(zhì)量估算實現(xiàn)策略
3.1 加速度信號獲取
由于該純電動輕型載貨汽車未配置電子穩(wěn)定程序(Electronic Stability Program,ESP),無法從控制器局域網(wǎng)絡(luò)(Controller Area Network,CAN)總線獲取整車的縱向和橫向加速度,因此需要加裝加速度傳感器,選擇某6軸傳感器,可實現(xiàn)X、Y、Z方向的加速度及繞X、Y、Z軸的角速度測量,并集成在整車控制器(Vehicle Control Unit,VCU)中。
3.2 邊界條件估算
計算整車質(zhì)量前需確認(rèn)計算的邊界條件并盡可能排除噪聲影響。
3.2.1 車輛轉(zhuǎn)向
車輛轉(zhuǎn)向時,整車姿態(tài)發(fā)生變化,影響整車質(zhì)量估算精度,因此,通過加速度傳感器獲取車輛的橫向加速度,在整車橫向加速度小于1 m/s2(標(biāo)定量)時估算整車質(zhì)量。
3.2.2 車輛制動
車輛制動時,不符合式(1)加速原理,因此,當(dāng)制動踏板未被踩下時,可以估算整車質(zhì)量。
3.2.3 車速
車輛靜止時,無法進(jìn)行整車質(zhì)量估算,車輛極低速條件下,干擾因素較多。因此,需在車速大于15 km/h(標(biāo)定量)時估算整車質(zhì)量。
3.2.4 縱向加速度
當(dāng)整車加速度較小時,估算精度較低,因此,需在縱向加速度大于1 m/s2(標(biāo)定量)時估算整車質(zhì)量。
3.2.5 滑移率
車輪打滑時,估算精度較低,因此在滑移率小于8%(標(biāo)定量)時估算整車質(zhì)量。
3.3 基于遞歸最小二乘法的整車質(zhì)量估計
在使用式(7)計算整車質(zhì)量時,會受到相關(guān)輸入信號噪聲的影響,其中,加速度信號和電機(jī)扭矩信號噪聲影響較大,因此,式(7)計算的結(jié)果偏差較大。該問題可以通過最小二乘法進(jìn)行優(yōu)化[3],在線性系統(tǒng)中,相當(dāng)于尋找參數(shù)θ,使得函數(shù))取得極小值:
當(dāng)式(10)取得極小值時,可得:
在實際使用中,整車質(zhì)量的估算是實時的,因此采用遞歸最小二乘法,即利用當(dāng)前時刻的測量值對上一時刻的估計值進(jìn)行修正。
每一時刻估計值的更新過程為:
增益的更新過程為:
協(xié)方差矩陣為:
式中,k為當(dāng)前采樣時刻;(k-1)為上一采樣時刻。
3.4 基于卡爾曼濾波的道路坡度估計
卡爾曼濾波估計器可以基于縱向加速度和車輪速度的噪聲信號估算道路坡度,卡爾曼濾波特別適用于狀態(tài)變量和輸出噪聲較大的過程,是基于輸入信號的測量數(shù)據(jù)、系統(tǒng)狀態(tài)方程、觀測方程實時獲得系統(tǒng)狀態(tài)變量和輸入信號的最優(yōu)估計的一種方法[6-7]。
4 整車質(zhì)量估算試驗結(jié)果
4.1 試驗方法
根據(jù)配置不同,該純電動輕型載貨汽車空載設(shè)計質(zhì)量約為2 600~3 100 kg,半載設(shè)計質(zhì)量約為4 500 kg,滿載設(shè)計質(zhì)量約為6 000 kg,在實際道路測試中分別在空載、半載、滿載條件下進(jìn)行測試。
試驗前,對車輛和駕駛員稱重,然后進(jìn)行實車測試,對比估算結(jié)果與實際結(jié)果的偏差。
4.2 試驗結(jié)果
4.2.1 整車空載質(zhì)量估算
車輛和駕駛員總質(zhì)量為2 890 kg,車輛估算結(jié)果如表1所示。
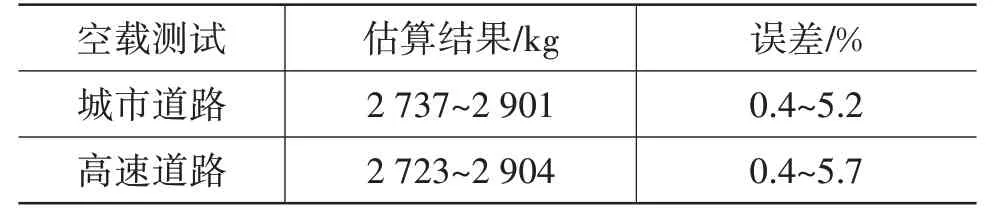
表1 空載估算結(jié)果
4.2.2 整車半載質(zhì)量估算
車輛和駕駛員總質(zhì)量為4 500 kg,整車質(zhì)量估算結(jié)果如表2所示。
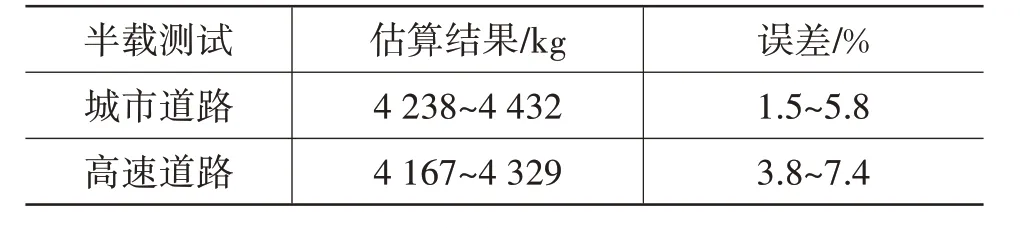
表2 半載估算結(jié)果
4.2.3 整車滿載質(zhì)量估算
車輛和駕駛員總質(zhì)量為6 090 kg,車輛估算結(jié)果如表3所示。
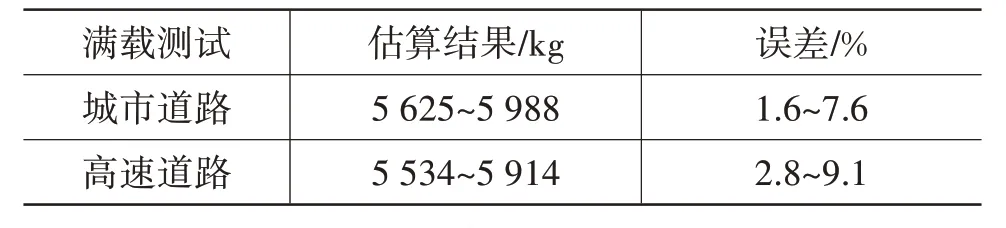
表3 滿載估算結(jié)果
綜上,空載質(zhì)量估算誤差為0.4%~5.7%,半載質(zhì)量估算誤差為1.5%~7.4%,滿載質(zhì)量估算誤差為1.6%~9.1%,總體整車質(zhì)量估算誤差小于10%。
5 滑行能量回收設(shè)計及仿真結(jié)果
5.1 基于整車質(zhì)量的滑行能量回收設(shè)計
純電動輕型載貨汽車在未獲得整車質(zhì)量的情況下,滑行能量回收均基于空載質(zhì)量進(jìn)行設(shè)計和驗證,若基于整車滿載質(zhì)量進(jìn)行設(shè)計和驗證,則在空載低附著系數(shù)路面行駛時,整車的滑行回饋扭矩很大,易發(fā)生打滑和甩尾。整車質(zhì)量可以作為滑行能量回收的輸入?yún)?shù),若估算算法未激活,默認(rèn)使用初始值3 000 kg,純電動輕型載貨汽車在無滑行能量回收等級選擇的情況下,基于空載設(shè)計和驗證的滑行最大減速度一般為0.07g,而整車在滿載工況下能夠產(chǎn)生的最大減速度約為0.035g。在不同載荷工況下,利用整車質(zhì)量參數(shù),可以設(shè)計具有與空載條件下相同的目標(biāo)減速度,整車可回收更多能量,從而降低能耗,提升續(xù)駛里程。
考慮到整車質(zhì)量計算模塊輸出值的精度及波動情況,將整車質(zhì)量分為若干個連續(xù)區(qū)間,區(qū)間長度為[αMmin,αMmax]范圍內(nèi)的任意值,其中,Mmin為車輛的空載質(zhì)量,Mmax為車輛的滿載質(zhì)量,α為整車質(zhì)量計算精度。
滑行減速度與整車質(zhì)量有關(guān),滑行時減速度aj計算為:
式中,F(xiàn)d為電機(jī)回饋制動力;Fz為整車阻力。
在不考慮車輛自身阻力的情況下,電機(jī)制動力與整車質(zhì)量成正比,即能量回收扭矩與整車質(zhì)量成正比。為提高計算效率,滑行車速相同時,認(rèn)為在同一質(zhì)量區(qū)間內(nèi)的整車質(zhì)量對應(yīng)的滑行減速度保持一致。滑行能量回收扭矩校正系數(shù)K為:
式中,M為所述目標(biāo)質(zhì)量區(qū)間中的任一整車質(zhì)量,為避免K頻繁變化,M選取為目標(biāo)質(zhì)量區(qū)間的最小值。
將扭矩校正系數(shù)K乘以基于空載設(shè)計的滑行扭矩得到的不同載荷工況下滑行回饋扭矩經(jīng)濾波處理后發(fā)送到電機(jī)控制器,基于空載設(shè)計的滑行扭矩如表4所示。
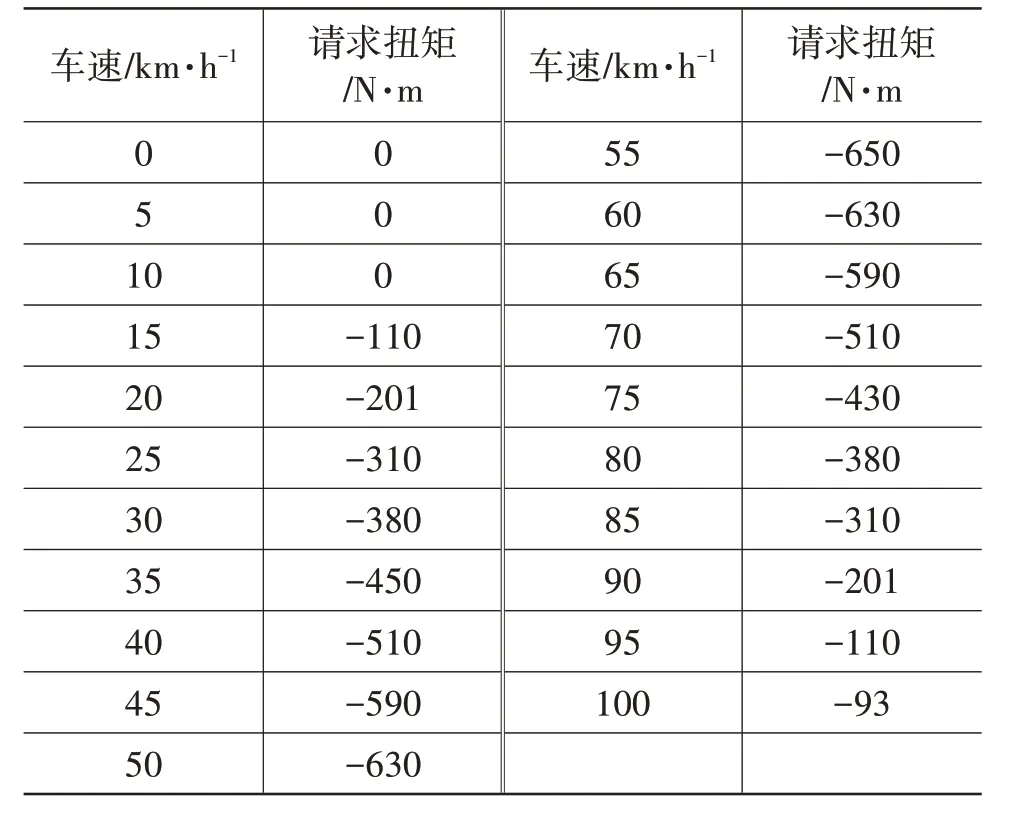
表4 空載滑行扭矩
5.2 仿真結(jié)果對比
基于滿載質(zhì)量6 000 kg 進(jìn)行仿真測試,設(shè)計2種工況:工況1 利用基于整車質(zhì)量參數(shù)進(jìn)行滑行能量回收設(shè)計的最大減速度,約為0.07g;工況2 采用未引用質(zhì)量參數(shù)的滑行最大減速度,約為0.035g。基于CRUISE 在C-WTVC 工況下進(jìn)行能耗仿真對比,最大減速度條件下的能量均回收,超過最大減速度時按最大減速度回收能量,能耗對比結(jié)果如表5所示,滿載工況下,能耗優(yōu)化5.5%。
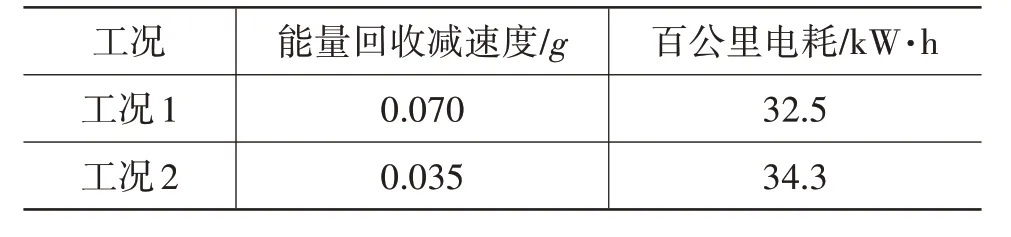
表5 能耗對比
6 結(jié)束語
本文首先利用最小二乘法和卡爾曼濾波算法分別估計整車質(zhì)量和實際道路坡度,并基于整車質(zhì)量參數(shù)設(shè)計滑行能量回收策略,實際道路測試和仿真驗證結(jié)果表明,所提出的純電動輕型載貨汽車質(zhì)量估算誤差不超過±10%,在車輛滿載工況下基于C-WTVC 工況進(jìn)行仿真對比,能耗優(yōu)化5.5%,顯著降低了整車能耗。
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車觀察(2016年3期)2016-02-28 13:16:26
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28