新能源車輛電源鋰離子電池模組動力供應穩態性優化
2023-08-24 02:22:44趙向明高曉勇劉世強
專用汽車 2023年8期
趙向明 高曉勇 劉世強
摘要:為了提高新能源車輛鋰離子電池使用壽命,延長電池模組動力的持續時間,對目前市面上的鋰離子電池模組動力供應系統及其相關智能制造、裝配技術進行研究,基于其動力供應特點和實際需求,分析了電池模組結構組成、具體功能作用和基本組成形式,設計了動力電池模組整體結構布局,同時聯合偏差模擬方法建立全局敏感矩陣,以動力電池模組數據信息集合為裝配序列基礎,實現了對鋰離子電池模組的智能化智造、裝配,并借助相關算法模型,計算和重新定義電池模組的裝配序列工位規劃標準,準確估算電池模組按需智能裝配的消耗時長。
關鍵詞:新能源汽車;車輛電源;動力供應元件;電池模組;智能制造;裝配技術;穩態性優化
中圖分類號:U472? 收稿日期:2023-04-15
DOI:10.19999/j.cnki.1004-0226.2023.08.003
1 前言
目前,電池模組是一種已在新能源汽車中得到廣泛推廣與認可的新興動力供應元件。就現階段實際應用情況而言,新能源車輛電源鋰離子電池模組供應成本持續上漲,已經超過汽車總成本的80%,而在未來的市場中,新能源車輛電源鋰離子電池模組勢因其穩定、強大的電源續航能力,勢必會提高新能源汽車制造的行業競爭力水平[1]。
電池模組的實際性能決定了新能源汽車整體的動力性、經濟性與穩態性,甚至會影響和關系到未來新能源汽車的普及與推廣。但是目前市場中很多新能源汽車所選用的動力電源電池模組封裝材料均為穩態性較差的鋁塑制品。這種材料與市面上使用較為普及的傳統動力電池模組相比,整體結構散熱性不強,這不僅會嚴重影響電池模組的實際放電容量,而且還會大大縮短新能源汽車電池模組使用壽命,甚至有可能降低汽車動力供應穩定行與安全性[2]。基于此,對新能源車輛電源鋰離子電池模組動力供應穩態性進行智能裝配技術優化研究,有助于提高動力電池模組的穩定續航能力。
2 電池模組智能制造技術
2.1 新能源汽車動力電池模組結構組成
常見的新能源汽車的動力電池模組分別由多個不同的結構共同組建而成,其中包括鋰離子電池、BMS系統、連接器、電芯、鑰匙開關及外殼等部件,其詳細功能作用介紹如下:
a.具備雙向轉換功能的鋰離子電池。它是新能源車輛電源鋰離子電池模組動力供應穩態性技術優化的關鍵所在,主要承擔著為汽車動力電池模組進行充電、放電的功能,在充放電時,鋰離子電池能夠實時將化學能、電能轉換為具體的能量。
b.BMS系統。該系統在汽車行進過程中,能夠發揮良好的減震、隔離作用,可有效避免汽車動力電池模組劇烈晃動[3]。
c.連接器。連接器作為一種功能輸出接口,它可以匹配連接新能源汽車動力端與電量輸出端,保證電池模組正常工作。
d.電芯。這里的電芯是指鋰離子電池的電化學電芯,它分別包含“正極”和“負極”兩個極端,一般而言,鋰離子電池使用的電芯為聚合物電芯,這種電芯粒徑小、純度高、電化學性能強。
e.鑰匙開關。它主要負責新能源汽車動力電池模組中鋰離子電池的閉合狀態與連接狀態控制。
f.外殼部件。它主要分布于新能源汽車鋰離子電池模組的外部區域,可以實時保護內部鋰離子電池過充或過放故障發生。
g.鎳帶導線。這是一種重要的部件,能夠通過電流形式,建立串聯連接或并聯連接關系,從而確保新能源汽車動力電池模組相關動力供應元件之間始終能夠保持良好的連續輸出狀態。
2.2 新能源汽車動力電池模組布局設計
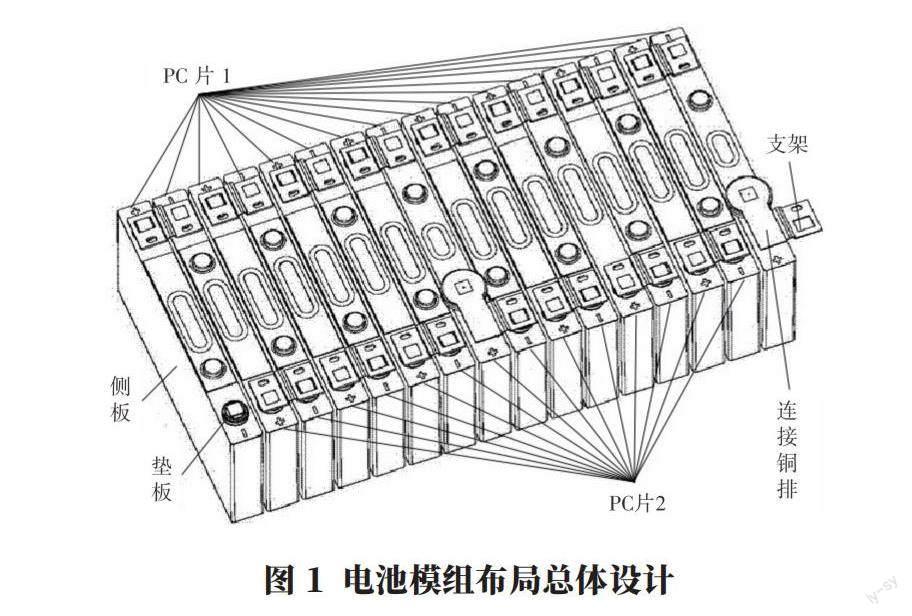
在布局設計動力電池模組整體結構時,首先需要按照新能源汽車實際功能所需,合理規劃BC片、PC片所處具體位置。從圖1中的結構連接形式可以看出,每個側板結構上端均勻分布的PC片都能對汽車電池模組放電容量完整記錄,同時還可準確計算新能源汽車在行進時電池模組電力傳輸量合理的電力供應量,由此對元件和電池模組工作狀態進行合理保護,使其可靠、穩定運行。除了左側邊緣側板與右側邊緣側板之外,每個BC片主要用于根據新能源汽車電池模組動力行為的具體表現,對其未來具體行進路徑進行合理規劃,在此過程中,BC片結構能夠使電池模組呈現出更加穩定的動力供應態勢,避免電量不合理供應部分出現[4]。
3 電池模組智能裝配技術
3.1 基于“偏差模擬法”規劃電池模組裝配序列
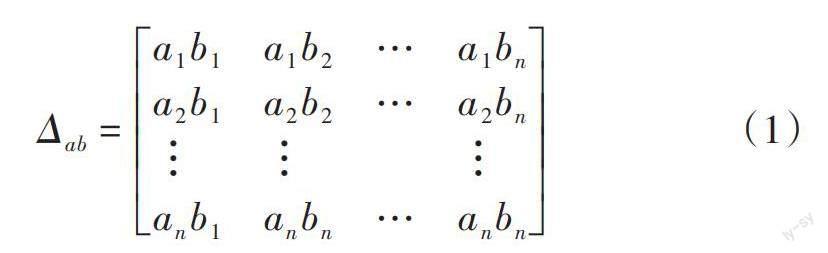
本文使用“偏差模擬方法”描述動力電池模組智能裝配層與零件層全局敏感矩陣偏差量線性關系,并以此為基礎,按照下列矩陣規劃新能源車輛電源鋰離子電池模組動力供應穩態性行為基礎數據信息集合影響[5],具體如下:
式中,a為電池模組動力供應穩態性智能裝配零件層偏差系數;b為電池模組動力供應穩態性智能裝配層偏差系數。
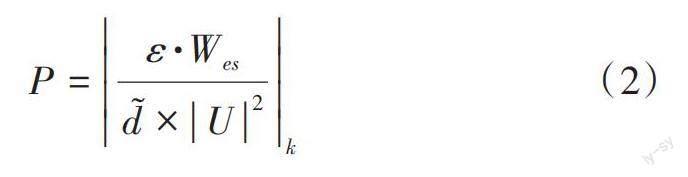
假設研究對象為電池模組,在建立式(1)所示的全局敏感矩陣的基礎上,通過對a、b等指標參量的實配關系進行分析,同時針對電動汽車動力電池模組智能裝配元件進行操作,即可掌握智能裝配順序,從而徹底解決電池模組裝配序列排序問題。本研究假設電池模組智能裝配系數指標ε的隨機結果始終屬于全局敏感矩陣集合,同時假設[d]代表動力電池模組在行進時的動力供應基礎條件,然后與式(1)聯立,則得到電池模組動力供應穩態性序列規劃結果表達式:
式中,k為電池模組既定的智能裝配標定序列標號。為了使電動汽車動力電池模組智能裝配更貼近于我國新能源汽車行進過程中的實際電量信號供應需求,式(2)中的k的取值范圍既不能等于其最大值n,也不能等于其初始值1。
3.2 劃分動力電池模組實時裝配工位
在電池模組優化可用智能裝配工位表示,在其序列規劃條件既定前提下,一般認為,動力電池模組兩個相鄰工位之間物理距離越近,其所能提供的實時動力強度就越大;相反,如果動力電池模組兩個相鄰工位之間的物理距離越遠,其所能提供的實時動力強度就越小[6]。基于此,本研究假設某款新能源汽車動力電池模組的兩個相鄰工位的定義坐標依次為I1、I2,此時動力電池模組的動力供應系數最小值為μmin,而最大值為μmax,然后與式(2)聯立可以得到相鄰兩個動力電池組的物理距離極值表達式:
式中,[dmax]、[dmin]分別為新能源汽車相鄰兩個動力電池組的物理距離最大值和最小值。假設m為既定時刻電池模組初始權限,X為新能源汽車動力電池組電信號值,聯立式(2)、式(3)可得到既定時刻電池模組動力供應穩態性優化標準:
據此,根據上述標準可實時掌握電池模組分布態勢,從而利用已知序列規劃條件,實現對動力電池模組實時裝配工位進行準確劃分。
3.3 估算電池模組動力供應穩態性時間
新能源車輛電源鋰離子電池模組動力供應穩態性時間主要是指從制造到裝配的完整生命周期。因每個電池動力模組的實際設備在其所處的智能制造裝配工位中的位置有所不同,所以會導致整個動力電池模組的智能裝配時間長度存在較大的差異[7-10]。基于此,本研究假設k1與k2分別為兩個不同的動力參量供應指標,且它們均與實際電信號輸出值有關,若k1≠k2,則該動力參量不等式條件恒成立。另外假設新能源汽車電信號輸出均值為[y],電池智能裝配系數為[?],電池智能裝配特征為j,根據上文可以得到特定模組區間內的與電池模組相關的裝配時間估算公式。通常情況下,電池模組穩態性取值應小于等于電信號長[11]。公式如下:
3.4 汽車模型實驗分析
本研究選取新能源汽車模型進行試驗分析,依次在試驗模型中安裝普通動力電池組與智能制造裝配技術下的動力電池模組,然后分別取550 Ω和1 050 Ω作為試驗模型的內阻取值試驗參數,并將電池模組所有感應開關完全閉合,使新能源汽車保持30 min的穩定行進,同時針對實驗組、對照組的電池模組放電容量數值實時變化波動情況進行分析,得到如圖2所示的波動曲線。
由圖2可以看出,與普通模組相比,使用智能制造裝配技術可以使電池模組動力供應保持充分的穩態性,且在動力供應時的內阻R值不同時,在1 050 Ω的大內阻條件下,電池模組放電容量均值水平可以實現最大化,且有利于提高電池模組使用性能,延長動力供應時間,同時能夠在有效的動力供應條件下保持相對穩定的放電能力。
4 結語
本研究測試結果表明,新型智能制造裝配技術在新能源汽車動力供應中的應用實踐,不但能夠為新能源汽車提供必要的動力供應保障,而且有助于提高動力電池模組的穩定續航能力,且能夠延長電池模組實際放電容量,保證新能源汽車動力電池模組動力供應狀態可靠、經濟、安全、穩定。
參考文獻:
[1]阮祖.新能源汽車動力電池模組的設計開發[J].內燃機與配件,2022(18):25-27.
[2]張清郁.基于智能化控制的新能源汽車動力電源系統電池模組堆疊控制系統設計[J].綠色科技,2021,23(24):222-224.
[3]朱小燕.無模組技術在新能源汽車動力電池中的應用與研究[J].科技與創新,2020(15):159-161.
[4]朱佳偉,史新民,秦小州.基于新能源汽車退役動力電池模組梯次利用的保護電路[J].電子世界,2020(9):152-155.
[5]劉立新,盛青山,趙曉燕.新能源汽車動力電源系統電池模組堆疊智能控制系統研究[J].機床與液壓,2019,47(21):135-138+159.
[6]張孝政.汽車動力電池模組自動化裝備的系統設計[D].深圳:深圳大學,2018.
[7]楊炤宇.動力電池模組自動化制造系統的設計[D].深圳:深圳大學,2018.
[8]李海君.新能源汽車用鋰動力電池熱管理系統研究[D].鎮江:江蘇大學,2018.
[9]張國路.電動汽車動力電池荷電狀態估計及均衡技術研究[D].合肥:合肥工業大學,2018.
[10]李杰浩.新能源汽車動力電池模組并聯特性的研究[D].廣州:華南理工大學,2018.
[11]張沛賢,謝秋菊,方君寧.新能源汽車用電池及電池模組的標準化探究[J].中國標準化,2017(10):6-7+9.
作者簡介:
趙向明,男,1983年生,工程師,研究方向為汽車檢測與維修。