汽車動力性測試研究
2023-08-24 19:58:50孫艷妮曹亞楠袁月會蘇娜
專用汽車 2023年8期
孫艷妮 曹亞楠 袁月會 蘇娜

摘要:針對當前傳統內燃機汽車和純電動汽車整車動力性能測試可分析性差、測試結果精確性不高以及測試方法單一的突出問題,采用Lab-VIEW汽車動力性測試系統軟件,從“汽車最高車速”“最大爬坡度”和“加速能力”測試三個維度,并基于虛擬儀器技術進行汽車動力性測試分析,提出了具體的測試試驗方法和注意事項,同時對兩種不同類型的汽車動力性測試的方式和具體差異進行總結梳理,以實際經驗為純電動汽車和傳統內燃機汽車的動力性改進與實驗測試研究提供一定的啟發與思路參考。
關鍵詞:純電動汽車;傳統內燃機汽車;虛擬儀器技術;動力性能;測試
中圖分類號:U467? 收稿日期:2023-04-10
DOI:10.19999/j.cnki.1004-0226.2023.08.029
1 研究背景
汽車所有的性能指標中,“動力性能”是影響汽車使用價值的關鍵指標之一,它也是汽車各大性能指標中最重要的一種測試指標[1]。一般來講,衡量和評價一款汽車工作效能的核心指標就是汽車動力性能的高低。以傳統內燃機汽車為例,它的動力性能指標主要由三個維度的內容構成,分別是汽車的加速能力、最大爬坡度和最高車速,但是對于目前新上市的純電動汽車而言,一般在評價和衡量該類汽車動力性能高低時,除了引入上述三個方面的指標外,還需通過充放電試驗來測試汽車的蓄電池耗能情況[2]。
2 研究方案設計
在汽車動力系統研究和開發過程中,動力性指標值計算分析的結果是否準確有效至關重要。傳統的汽車動力性能指標檢測儀器在產品出廠之前已經被廠家定義好,所以在后期使用過程中,用戶無法自行更改相關參數,這就導致某些測試功能存在一定的局限性,只能對汽車某些特定的動力性能指標進行測試分析。
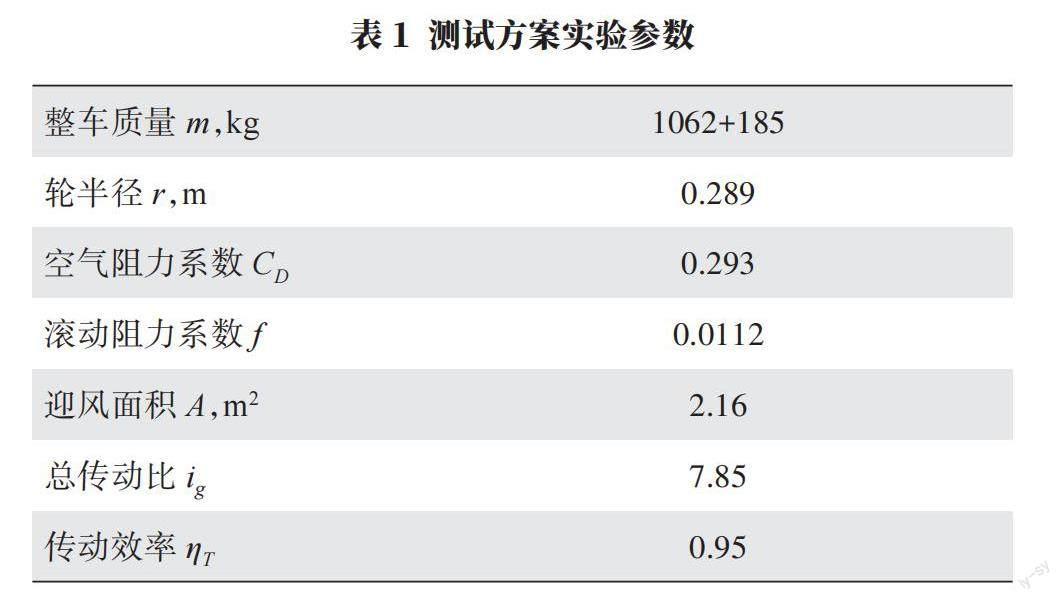
為了提高汽車動力性能測試效能,本研究基于虛擬儀器技術開發設計了一款汽車動力性測試分析系統,結合NI公司的軟、硬件設備,對傳統的汽車動力性測試儀器進行優化改進,該測試分析系統在現場實用性、數據測試準確度、測試效率、數據分析速度等方面均能夠滿足當前的需要。該動力性測試分析系統具有開放性好、擴展能力強等優點,大大提高了汽車動力性能主觀與客觀評價效能。該測試方案通過虛擬儀器技術來完成對傳感器發出的速度信號的采集、處理和分析,借助軟件來實現采集、顯示、分析等功能。該測試系統由軟件和硬件兩部分構成,其中硬件部分主要由OES-Ⅱ非接觸測長測速傳感器、DAQ card-AI-16E-4(NI-6041E)數據采集卡、SC-2040數據保持卡、自行設計制作的電壓轉換器和筆記本電腦組成;軟件部分是測試系統的核心部分,主要實現速度傳感器信號的采集、分析并顯示車輛行駛的實時速度、路程、最大加速度。測試系統以圖形化編程語言Lab VIEW為工具,編寫汽車動力性測試系統程序。某新能源汽車的常規參數如表1所示。
3 汽車動力性測試方案實施與結果驗證分析
3.1 最高車速試驗測試
在汽車動力性能試驗測試時,首先需要測試汽車的最高車速。這一指標并非是一個瞬時值,相反它指的是汽車在良好、水平的直線路段上保持一定動力行駛時所能達到的最高車速。由于目前市場上常見的車型有兩種,一種是純電動汽車,另一種是傳統的內燃機汽車,二者由于動力來源不同,所以在汽車的動力性能測試試驗過程中,應注意二者的試驗測試區別。首先是在選擇測試道路時,純電動汽車最高車速試驗測試時的跑道直線長度應在1 200 m以上,測試跑道環線長度應在1 300 m以上,而傳統內燃機汽車最高車速試驗測試時的跑道直線長度與跑道環線長度分別應≥250 m和≥2 500 m。在車輛預熱過程中,純電動汽車需要保持既定的運行時長與速度,但傳統內燃機汽車對于車輛的預熱溫度只需要滿足汽車制造廠規定的溫度[3]。所以在計算這兩種不同類型的汽車最高車速時,要注意汽車車速測試詳細測試方法、指標與具體要求,具體如下:
a.測試跑道直線長度:純電動汽車≥1 200 m;內燃機汽車≥250 m。
b.測試跑道環線長度:純電動汽車≥1 300 m;內燃機汽車≥2 500 m。
c.測試加速區縱坡角度:純電動汽車≤3.5%;內燃機汽車≤0.6%。
d.測試發動機預熱要求:純電動汽車,在30 min之內,嚴格按照純電動汽車80%的最高車速勻速行駛約5 km,保證汽車傳動系統以及電機系統充分預熱;內燃機汽車,其動力系統相關零部件必須達到相應汽車生產廠商穩定的溫度標準。
e.單一方向汽車最高車速測試試驗條件:純電動汽車,連續進行2次重復試驗,且在任一測試時段節點中,汽車最高車速值須≤1 m[4];內燃機汽車,連續進行6次重復試驗,且在任一測試時段節點中,汽車最高車速值須≤1.5 m。
f.雙方向汽車最高車速測試試驗條件及汽車最高車速計算方法:純電動汽車,vmax=(v1max+vQmax)/2;內燃機汽車,[vmax=1313v1]。
g.汽車以最高車速行駛時的整車動力要求:純電動汽車蓄電池處于完全充電的85%左右。
3.2 最大爬坡度試驗測試
一般來講,汽車的最大爬坡度指的是汽車在滿載符合狀態下于良好路面上所要通過的極限坡道,該數值通常采用“%”來表示,闡述的是汽車在良好路面上的坡道垂直高度與汽車在滿載狀態下勻速通過極限坡道時的水平距離的比值。但是在實際測試過程中,由于車輛動力性能來源不同,所以導致汽車最大爬坡度試驗實際測試方法也有所不同[4]。
在測試汽車的最大爬坡度路段實際長度上,純電動汽車與傳統內燃機汽車規定的實際數值完全不同,基于此,在試驗測試最大爬坡度這一指標時,需要嚴格根據車輛動力性差異來選擇實際的測試路段長度[5]。除了路段實際長度之外,在測試環節,還應注意不同車輛的輪胎氣壓,在標準要求上,純電動汽車無特殊規定,但是對于傳統內燃機汽車來講,必須要按照廠家規定的明確氣壓要求對汽車動力性進行測試。
此外,傳統的內燃機汽車并沒有嚴格規定汽車的實際試驗測試速度,一般情況下,只需要確保汽車保持低速勻速行駛即可,但需要將汽車油門開至最大,與此同時,在數據收集過程中,純電動汽車和傳統內燃機汽車分別需要收集車輛速度數據、發動機運行數據和汽車爬坡時以10 m/min速度行駛時通過測量區域的時間數據。
根據這一要求和規定,在測試汽車爬坡度指標時,必須要保證純電動汽車和傳統內燃機汽車都要達到此要求。需要注意的是,在二者實驗測試結果數值計算過程中,需要采用如下公式來計算純電動汽車與傳統內燃機汽車的爬坡度[6-7],純電動汽車的爬坡度計算如下:
式中,Ft為平衡純電動汽車行駛載荷所需“牽引力矩”;M為純電動汽車出廠時整車最大質量;g為純電動汽車行駛過程中的重力加速度。
傳統內燃機汽車的爬坡度計算如下:
式中,D為傳統的內燃機汽車行駛過程中的動力因數;f為傳統的內燃機汽車行駛過程中的路面滾動阻力系數。
3.3 加速能力實驗測試
提到汽車加速時間,汽車理論對該測試指標有兩項要求,分別是測試汽車的超車加速時間與原地起步加速時間。另外,汽車加速能力實驗測試也包含兩項基本內容,分別是汽車固定擋和起步連續換擋加速性能試驗,在試驗測試過程中,上述兩項基本的試驗測試過程都是從汽車由低速全力向高速全力加速開始測量,這一過程的耗時即為汽車加速時間。通過上述分析可以看出,在汽車加速能力測試環節,純電動汽車的試驗測試方法與傳統內燃機汽車存在一定的差別,具體表現在以下三個維度[8]:
a.在試驗測試汽車的起步加速性能時,純電動汽車的加速時間指的是汽車由靜止加速到汽車實際行駛速度保持在50 km/h時的耗時,而傳統內燃機汽車的加速時間指的是汽車由靜止加速到汽車實際行駛速度保持在100 km/h時的實際耗時。
b.在試驗測試相關數據收集過程中,還需測試收集傳統內燃機汽車由靜止到全加速通過400 m的時間數據,但純電動汽車則無需收集這一數據指標。
c.在試驗測試次數方面,純電動汽車只需要往返各測試一次,但一般要求對傳統內燃機汽車的行駛數據進行三次以上的往返測試。
汽車加速能力試驗詳細測試要求如下:
a.測試加速時間1:純電動第一次加速所需時速為50 km/h;傳統內燃機汽車第一次加速所需時速為100 km/h,往返測試三次,取平均值。
b.測試汽車加速時間2:純電動汽車第二次加速反方向行駛所需時速為50 km/h;傳統內燃機汽車第二次加速由靜止到全速通過400 m時所需時速為100 km/h,汽車往返測試三次,取平均值。
c.測試前所要達到的速度:純電動測試前車速需要達到50km/h,且連續保持行駛500 m的距離;傳統內燃機汽車在測試前需要達到60 km/h,且需要連續保持行駛2 s以上。
d.測試時的汽車加速時間采集:純電動汽車反方向70 km/h與50 km/h所需時間;傳統內燃機汽車行駛80 km/h所需時間。
e.能力試驗其他要求:純電動汽車加速能力測試時蓄電池處于完全充電的55%以上[9];傳統內燃機汽車超越加速能力測試時汽車輪胎至少需要連續經過100 km的磨合。
另外,兩者在汽車起步加速性能試驗測試和汽車超越加速性能試驗測試次數方面,要求均一致。
綜上分析可以發現,汽車的動力電池最大持續放電電流和瞬間放電電流這兩項指標都會嚴重影響和干擾純電動車的加速能力測試結果。
4 結語
傳統內燃機汽車是目前市面上常見的主流車型,但是這類汽車與新型的純電動汽車相比,二者在整車動力性能方面尚存在較大差異,由于傳統內燃機汽車對環境的污染較大,且能耗較高,因此純電動汽車日益受到廣大汽車用戶、汽車制造商與測試研究者的重視和關注。通過本文的研究與論述可以看出,汽車動力性測試主要包含汽車最高車速、最大爬坡度和加速能力三項指標,由于車輛動力性能存在差異,所以具體實驗測試方法與內容也有較大區別,因此試驗實測值與仿真值的對比可以更加全面、客觀地評價和衡量車輛的整車動力性能差異,并有效地指導純電動汽車和傳統內燃機汽車的設計、整車目標的制定、動力系統的選擇以及政策性能預測和分析。
參考文獻:
[1]姜銀煥.基于ADVISOR的汽車動力性仿真研究[J].新型工業化,2021,11(5):139-140.
[2]范青海.純電動汽車動力性標定方法研究[J].汽車實用技術,2020,45(21):5-7.
[3]王一博.汽車動力性能主觀與客觀評價相關性研究[J].汽車實用技術,2019(24):101-103.
[4]蔣玉爽.某純電動汽車動力系統匹配及整車性能仿真與測試[D].長春:吉林大學,2018.
[5]王國軍,王磊,李遠.汽車動力性與經濟性開發及其影響因素[J].汽車工程師,2015(7):17-20.
[6]張宏超,馬俊達,李克,等.基于發動機在環(EIL)測試的車輛傳動系最優匹配的研究[J].汽車工程,2014,36(8):1019-1023.
[7]王云龍,張洪田.混聯式混合動力系統模糊控制器研究[J].武漢理工大學學報(交通科學與工程版),2013,37(4):733-736.
[8]盤朝奉,徐興,廖學良,等.基于動態建模仿真的純電動汽車動力性分析[J].重慶交通大學學報,2012,31(2):335-338.
[9]劉忠途,伍慶龍,宗志堅.純電動汽車動力性與能耗靈敏度分析[J].上海汽車,2010(12):8-11.
作者簡介:
孫艷妮,女,1991年生,講師,研究方向為能源與動力。