基于機載LiDAR系統的電力線點云提取方法研究
2023-09-05 02:04:16張智前葉周潤肖信峰
合肥工業大學學報(自然科學版) 2023年8期
張智前, 葉周潤, 歐 鑫, 肖信峰
(合肥工業大學 土木與水利工程學院,安徽 合肥 230009)
0 引 言
我國國土面積遼闊,人口數量基數大。近年來隨著國民經濟的不斷發展,架空輸電線路里程不斷增加,電網結構日益復雜,長距離輸電線路電力巡檢面臨著極大的挑戰。傳統的電力巡檢方式存在人員危險度高、人力物力消耗大、效率低下等問題,而無人機機載激光雷達技術可以快速自動高效獲取地面地物高精度三維點云信息,在電力巡檢方面具有快速化、低成本、低危險性等優勢,因此近年來無人機機載激光雷達技術在電力巡檢方面得到了廣泛的應用。
目前,無人機電力巡檢主要分為電力線提取[1-6]、電力線危險高度分析[7-8]以及電力線三維重建[9]3個方面,其中電力線提取作為主要研究內容近年來受到國內外眾多學者關注。文獻[10]將電力線點云投影到XY平面后使用K-means進行聚類提取;文獻[11]將電力線點云分段投影到XY平面后使用RANSAC提取;文獻[9]將電力線點云投影到平面進行二維Hough變換,再使用分段K均值聚類采樣精提取。上述文獻均將點云投影到平面再進行處理,存在絕緣子處提取效果差且易將多根電力線錯分為1根的問題。文獻[12]對整體點云進行子空間分割處理后根據密度特征提取;文獻[13]對原始點云進行子空間分割后基于傾斜角度平均值提取。上述文獻均對點云進行子空間分割,解決了地形起伏問題但存在處理效率低的問題。文獻[14]分離出候選點后將其轉化為二值化圖像并進行形態學優化,再使用區域增長精細化提取;文獻[15]對整體點云垂直處理預測電力線位置并使用3D區域生長法分割候選點;文獻[16]通過尋找種子點使用區域生長法提取。上述文獻均使用區域生長法提取電力線點,存在無法精確提取絕緣子點與對原始點云密度要求較高的問題。文獻[17-19]使用隨機森林以及馬爾科夫隨機場通過自舉樣本學習,采用機器學習方法提取,準確度較高且處理速度快,但存在需要大量訓練樣本與先驗知識且對不同環境適應能力差的問題。
針對上述問題,本文提出一種新型電力線點云提取方法。對點云分塊采用改進的迭代高程閾值法濾除地面點與大部分地物點,解決了因地勢起伏過大引起的傳統高程閾值法濾波效果差的問題;對于濾除桿塔點時存在的將電力線點誤分到桿塔點的問題,通過結合點云高程搜索將誤分的電力線點提取出來。
1 激光雷達電力線提取
本文提出的基于機載LiDAR系統的電力線激光雷達點云提取方法流程如圖1所示。該方法首先按點云走向依據距離進行分塊,采用迭代高程閾值法濾除地面點與大部分地物點;然后對于含桿塔點的分塊點云,使用DBSCAN密度聚類濾除桿塔點,其中被誤分到桿塔類的電力線點結合高程變化提取出來;最后采用歐式聚類方法對整體電力線點進行精細提取。
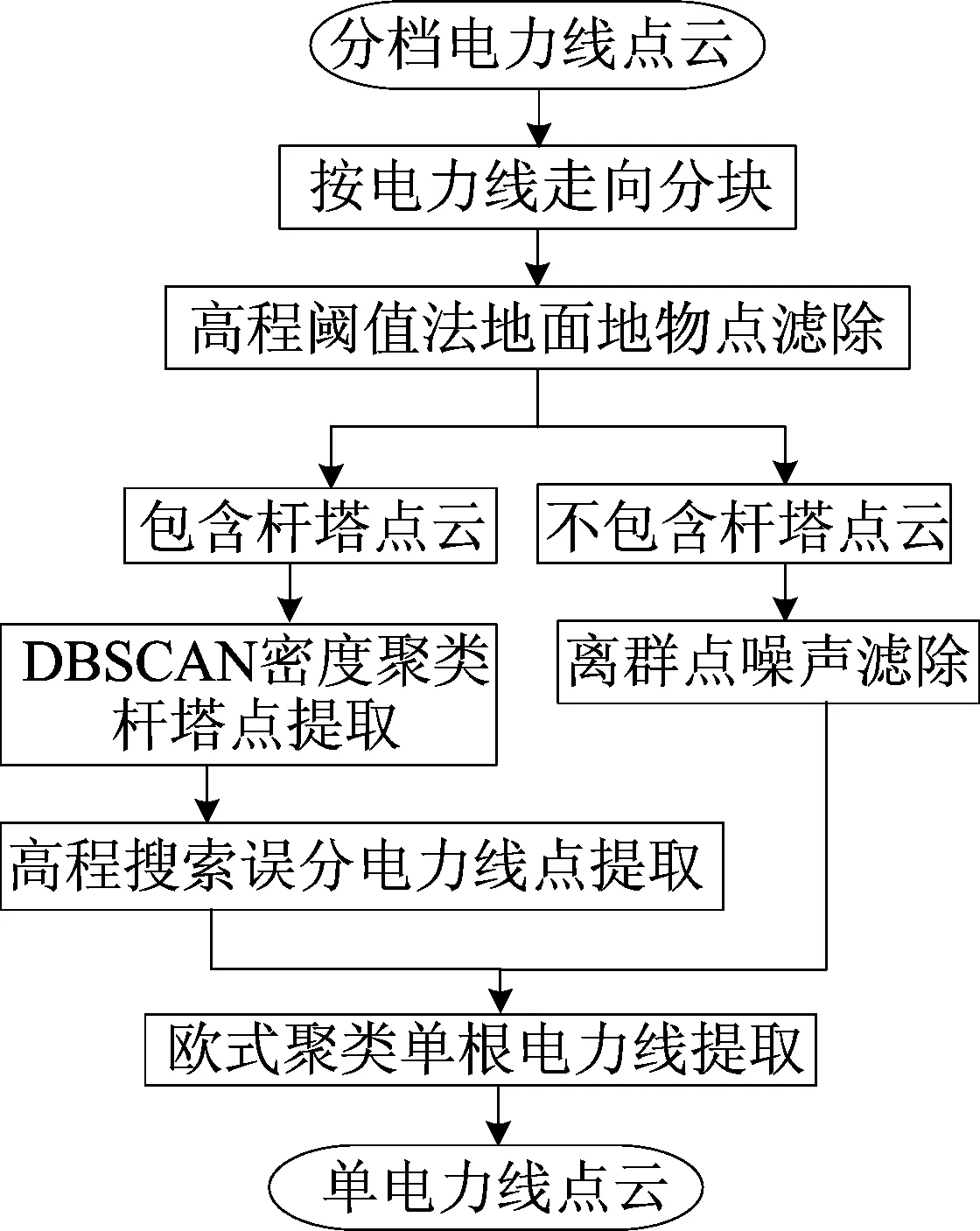
圖1 電力線點云提取流程
1.1 整體點云分塊
機載激光雷達所獲取的點云數據主要包括電力線、電力桿塔、植被房屋和地面等,由于點云數據量大,對整體點云進行處理效率低;同時對于地勢起伏較大的數據使用傳統高程閾值法濾除地面地物點,會存在地勢較高處地面地物點無法濾除或濾除效果差的問題。針對這一問題,對整體點云依據電力線走向進行分塊處理。
1) 電力線走向判斷。目的是確定分塊方向,防止將電力線縱向分割。先對整體點云的最大最小XY坐標進行計算,再計算最大最小XY坐標的差值Δxy確定電力線走向是X方向還是Y方向。Δxy計算公式如下:
Δxy=(Xmax-Xmin)-(Ymax-Ymin)
(1)
其中:Xmax、Xmin分別為最大和最小X坐標;Ymax、Ymin分別為最大和最小Y坐標。當Δxy為正值時,將點云按照X走向進行分塊;當Δxy為負值時,將點云按照Y走向進行分塊。
2) 確定分割距離分塊。目的是解決因地勢起伏較大引起的地面地物點難以濾除的問題。選擇合適的分割距離對于后續處理至關重要,分割距離過大會導致分割效果不明顯,分割距離過小會加重程序運算的負擔影響效率,一般分割距離選擇為50 m,根據地形起伏坡度大小的不同可適當增加或減少分割距離。
1.2 電力線粗提取
粗提取的目的是為了濾除地面點與大部分的地物點,為下一步的精提取打好基礎。電力線粗提取采用迭代高程閾值法對分塊點云進行處理,處理流程如下:
1) 點云平均高程計算。計算出點云的平均高程H作為分隔閾值將點云分割為上下點云,H的計算公式如下:
(2)
其中:hi為第i點云高程;n為總點云數量。
2) 上下點云分割。以點云平均高程為閾值分割上下點云,上點云為電力線點云,下點云為地物地面點點云。
3) 上下點云平均高程均值計算。分別計算上下點云平均高程,再求出其均值Hm,Hm計算公式如下:
(3)
其中:Hu為上點云平均高程;Hd為下點云平均高程。
4) 最佳閾值迭代計算。將上下點云平均高程均值Hm作為步驟1)中的點云平均高程H,繼續步驟2)和步驟3),迭代計算直至收斂,最后獲得的平均高程為最佳高程分割閾值,分割所獲得的上點云即為單一的電力線點云。
1.3 電力線精提取
經過粗提取之后,包含電力桿塔的點云存在電力線點、絕緣子點與部分桿塔點,需要單獨進行處理。在濾除電力桿塔的過程中存在將部分與桿塔相近的電力線點誤分到電力桿塔的情況,為了更精細完整地提取電力線點,需將誤分的電力線點與絕緣子點分離,進而提取完整的單根電力線。
1.3.1 誤分桿線聚類分離
為了完整地將電力桿塔進行濾除,使用DBSCAN密度聚類提取桿塔點云,掃描半徑的設置不可過小,否則會存在將部分與絕緣子相連接的電力線點云誤分到電力桿塔類的情況。電力桿塔的結構導致其在同一水平坐標下有多個不同高程點云,而誤分電力線點云由于是架空線在不同的水平坐標下只存在一個高程點云,因此可以對分類的桿塔點云進行高程搜索,進而將誤分的電力線點云分離出來。高程搜索原理如圖2所示,處理流程如下:
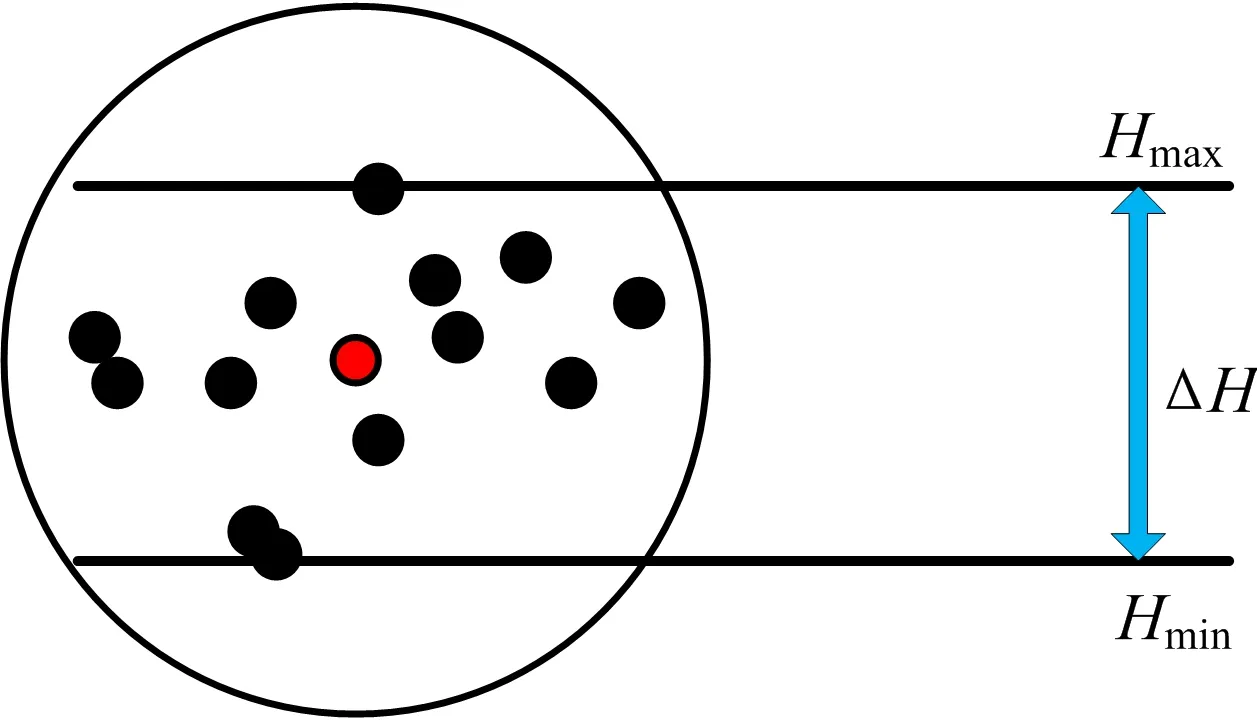
圖2 高程搜索原理示意圖
1) 設置搜索半徑r,半徑內最小點的數量minPts,最大點的數量maxPts,遍歷搜索點云,若目標點云搜索半徑內點的數量小于minPts或大于maxPts,則將其標記為噪聲點。
2) 剔除所有噪聲點云。
3) 隨機提取一個非噪聲點為種子點,對此種子點進行半徑搜索,統計搜索半徑內點云最大最小高程。若最大最小高程差小于0.5 m,則將此種子點與其搜索半徑內所有點云歸類到誤分的電力線點云類中;否則將其歸類到電力桿塔點云類中。
4) 設置新的種子點,重復進行步驟3),直至所有非噪聲點完成分類。
1.3.2 電力線聚類
將電力桿塔進行剔除之后,所保留的點云為電力線點和部分桿塔噪聲點。由于每根電力線相互平行且間距較大,若要得到完整的單根電力線,可以使用歐式聚類的方法對單根電力線進行精細提取。歐式聚類根據點與點之間的鄰近距離來判斷兩點是否屬于一類,對于平行電力線的幾何空間特征,可以有效地將單根電力線進行提取,對多根電力線分割效果明顯。歐式聚類提取流程如下:
1) 隨機選取一點作為種子點,設置搜索半徑進行搜索,將所有與種子點距離在搜索半徑內的點與種子點歸為一類。
2) 選取類中除種子點外的另一點,重復步驟1)進行搜索歸類直至沒有新點加入類中。
3) 再隨機選取一點作為新的類的種子點,重復步驟1)和步驟2),直至所有點都加入了自己所屬于的類中。
2 實驗與分析
本文以Microsoft Visual Studio 2017為實驗平臺,結合PCL庫以及libLAS庫完成電力線激光點云提取算法設計。實驗平臺的配置為:DELL工作站,CPU為Intel酷睿i510500,GPU為NVIDIA GeForce GTX 1660 SUPER。為了驗證算法的可行性,采用3段不同地形條件下野外架空輸電線路機載激光點云數據進行實驗測試。線路1為平坦地形條件下點云數據,線路總長度為1.45 km,線路走向為直線型,點云總數量為4 540 016 個,點云平均密度為91 點/m2,共有14 根電力線,2個不同類型的電力桿塔,同檔水平電力線水平投影平均距離為0.6 m。線路2為高坡度地形條件下點云數據,線路總長度為3.5 km,線路走向為折線型,點云總數量為7 210 145 個,點云平均密度為64 點/m2,共有14 根電力線,4個不同類型的電力桿塔,同檔水平電力線水平投影平均距離為0.5 m。線路3為混合地形條件下點云數據,線路總長度為1.75 km,線路走向為直線型,點云總數量為7 854 169 個,點云平均密度為89 點/m2,共有14 根電力線,3個不同類型的電力桿塔,同檔水平電力線水平投影平均距離為0.6 m。
原始點云數據如圖3所示。
地面地物點濾除結果如圖4所示。
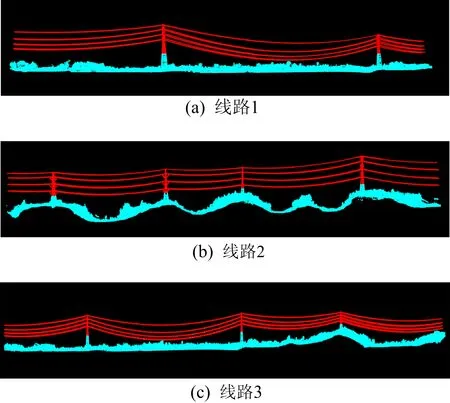
圖4 地面地物點濾除結果
圖4中:紅色為包含電力線點的上半部分點云;青色為應該濾除的地面點、地物點以及靠近地面的部分桿塔點。由圖4可知,通過使用改進后的迭代高程閾值法將分檔輸電線路點云數據進行分塊處理,無論在平原地帶還是坡度較大的山地區域,都可以實現電力線點云與地面點的分離。
電力桿塔粗提取結果如圖5所示。圖5中:紅色為電力線點云;黃色為粗提取的桿塔點云;青色為已經濾除的地面地物點以及部分雜點。從圖5可以看出,通過使用DBSCAN密度聚類的方法基本可以將電力桿塔完整地提取出來,然而會將與電力桿塔相連接的部分電力線點云與絕緣子點云聚類到電力桿塔類中,因此需要采用高程搜索處理將誤分的電力線點云從電力桿塔類中提取出來,為下一步電力線精提取做好準備。
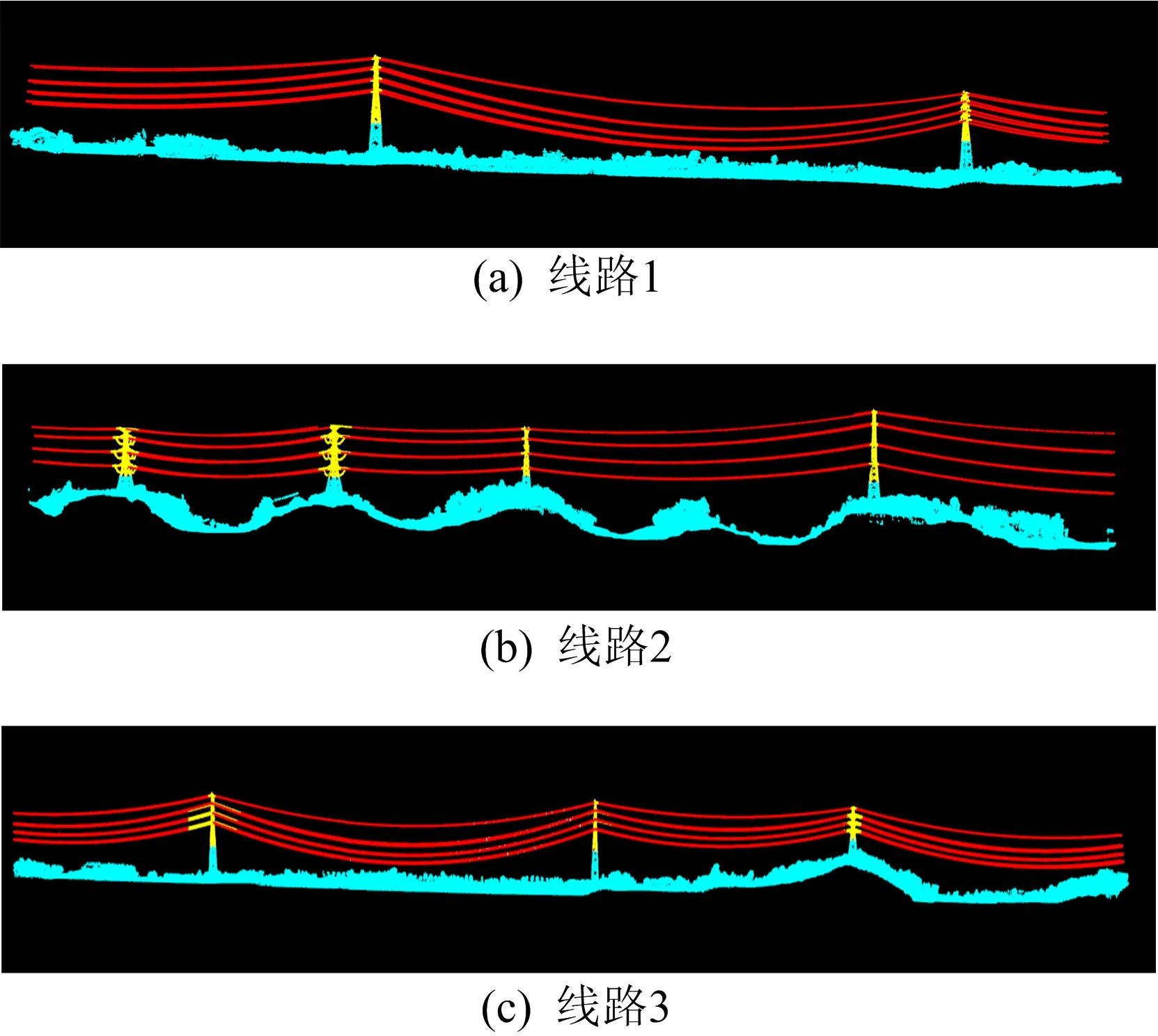
圖5 電力桿塔粗提取結果
電力線提取結果如圖6所示。

圖6 電力線提取結果
圖6中:紅色為提取出的電力線點;青色為除電力線點以外的點。從圖6可以看出,本文的電力線點云提取算法可以準確完整地將電力線點云提取出來,同時提取的電力線基本可以延伸到絕緣子處,滿足實際生產中電力線提取要求。
為了進一步驗證本文電力線點云提取的準確性,對原始數據中電力線點進行手動提取,同時使用TerraSoild軟件處理原始數據提取電力線點,以手動提取結果為基準分析本文方法與軟件提取結果的提取率。本文方法提取的電力線基本完整,各股電力線比較清晰,而使用軟件提取的電力線有較多缺失,尤其是在絕緣子處以及懸鏈線最低處漏提取較為嚴重。3種方法對比分析結果見表1~表3所列。
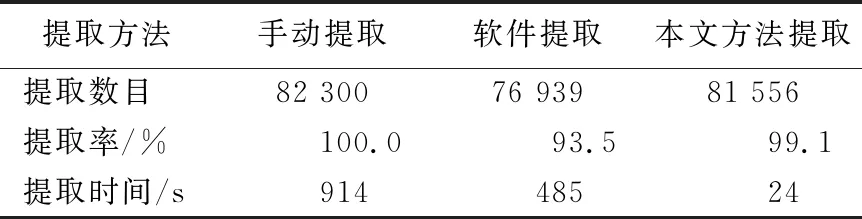
表1 線路1電力線提取對比分析結果
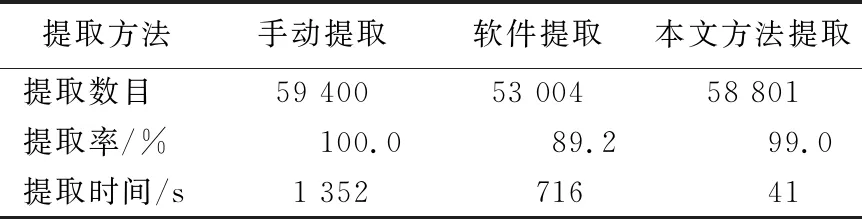
表2 線路2電力線提取對比分析結果
從表1~表3可以看出,軟件進行提取電力線的提取率為90%左右,而本文方法提取電力線的提取率為99%以上,高于軟件提取效果。對于總點云數量為百萬級別的數據進行電力線提取,手動提取一般耗時十幾分鐘,軟件提取和傳統提取方法時間一般為分鐘級,而本文方法將處理時間控制在秒級。本文方法著重于電力桿塔絕緣子處電力線的精細化提取,粗提取出電力桿塔后結合高程搜索能準確地將電力線與桿塔進行分離,防止造成整根電力線缺失的情況,保證高提取率的同時也大大提高了自動化程度。
3 結 論
本文提出了一種自動化程度高、準確高效的電力線激光點云提取方法。在地面地物點濾除過程中改進了傳統的高程閾值法,通過對整體點云進行分塊處理后再進行高程閾值的迭代計算,解決了傳統高程閾值法在坡度變化較大區域提取效果差的問題,提高了濾波算法在各種不同地形條件下的適用性。在電力線精提取過程中設計了一種新型的針對絕緣子處電力線點云的提取方法,通過高程搜索處理對誤分到桿塔類的電力線點進行進一步提取,從而保證了絕緣子處電力線點提取的準確性與完整性,提高了整體電力線提取的精度。實驗結果表明,本文的基于機載LiDAR系統的電力線點云提取方法可以應對各種不同地形條件,具有較好的魯棒性,電力線提取精度較高,滿足實際電力巡檢生產需求,可以應用于野外架空輸電線路的點云數據處理中。