多飛行器協同任務分配的改進粒子群優化算法
2023-09-07 09:39:26王磊徐超李淼趙慧武
兵工學報 2023年8期
關鍵詞:分配
王磊, 徐超, 李淼, 趙慧武
(1.北京特種機電控制研究所, 北京 100012; 2.北方自動控制技術研究所, 山西 太原 030051)
0 引言
在當今軍用和民用領域,飛行器在目標搜索、對地攻擊、空中搜救、交通巡查以及快遞運輸等方面發揮著重要作用[1]。因為單架飛行器無法高效率的完成復雜任務,經常需要使用多個飛行器協同完成復雜任務。因此,多飛行器系統在復雜的任務環境實現靈活的任務,已成為重要研究內容[2],多飛行器協同任務分配問題已成為飛行器自主導航領域亟需解決的關鍵問題[3]。
多飛行器協同任務分配是指:給定飛行器的種類及數量,根據一定的物理環境信息和任務要求,將一個或多個任務分配給一個飛行器,當所有飛行器完成所分配的任務后,整個飛行器編隊的整體效能達到最優[4]。在解決多飛行器任務分配問題時,需考慮飛行器的任務能力上限、任務時序約束以及實時規劃有效性等要求[5]。理論上,多飛行器任務分配問題屬于非確定性多項式困難(NP-hard)的排列組合問題。對于大規模系統,難以完全避免組合爆炸問題。目前,研究者提出了多種計算可行的協同任務分配算法。文獻[6]提出一種基于“招標-投標-中標”的市場拍賣機制,設計了多Agent分布式任務分配算法。文獻[7]重點研究了實際任務環境中存在的不確定性約束條件,提出一種分布式多無人機協同任務分配方法。文獻[8]提出了基于拍賣和一致性原理的分布式任務分配算法。文獻[9]利用混合整數規劃的方法研究了無人機搜索任務分配問題,給出問題的最優解。智能進化算法因為具有靈活、易實現和計算復雜度低的特點,被廣泛地用于多飛行器協同任務分配的研究。文獻[10]在多子群蟻群算法的基礎上,提出了基于分工機制的蟻群算法求解無人機協作多任務分配問題。文獻[11]建立了蝗蟲仿生算法用于多無人機搜救任務。文獻[12]提出一種改進遺傳算法(GA),用于集中式在動態環境中給無人機任務分配任務。文獻[13]將差分進化算法用于解決任務分配問題。文獻[14]提出基于和聲搜索算法的任務分配算法。
與其他智能進化算法相比,粒子群優化(PSO)算法具有較強的尋優能力,且魯棒性較強。文獻[15]提出用于調整PSO算法的主要控制參數的自適應策略,并研究了PSO算法的收斂性。為了進一步提高PSO算法在解決任務分配問題的效率,文獻[16]采用混合整數規劃的方法構造適應度函數。文獻[17-20]提出了多種用于任務分配和路徑規劃的改進PSO(MPSO)算法。
本文研究了多飛行器協同任務分配問題,提出了一種任務分配MPSO算法。主要創新點包括:基于粒子連續性的位置和速度,解碼出離散化的任務分配方案,即實現了PSO算法連續性解的離散化;為了防止算法過早陷入局部收斂的問題,根據模擬退火算法原理,建立一種跳出局部收斂的策略,并將這種策略嵌入到PSO算法的每一次迭代中;與其他算法進行了對比實驗,驗證了本文提出的MPSO算法的有效性。
1 多飛行器協同任務分配數學模型
本文基于水平二維戰場環境研究了多飛行器協同任務分配問題。每架飛行器按照一定的攻擊順序對地面多個目標進行打擊,同時目標也能偵查、攻擊飛行器,對飛行器具有一定的防空威脅。
假定總共有Nu架飛行器U={U1,…,UNu}和Nt個目標T={T1,…,UNt},需要對每個目標執行一次攻擊任務,因此相應的共有Nt個任務M={M1,…,MNt}。飛行器數目遠遠小于任務數目,即Nu?Nt。本文研究的任務分配問題的目標是為每架飛行器Ui指派一個順序攻擊任務集合Θi:
Θi=〈Mw,1,Mw,2,…,Mw,k〉
(1)
式中:Θi為給飛行器Ui指派的任務,所有任務Θi就構成了一個任務分配解或方案,i∈{1,…,Nu}。當Ui執行Θi時,先從初始位置Bi起飛,先執行任務Mw,1, 然后攻擊Mw,2,以此類推,依次攻擊Θi中的任務。Ui攻擊完最后一個任務Mw,k后返回初始位置Bi,總航程表示為dis(Θi)=dis(Bi,Tw,1)+Σs∈{1,…, k-1}dis(Tw,s,Tw,s+1)+dis(Tw,k,Bi),其中函數dis(·)表示兩個任務的相應目標或初始位置與目標之間的距離。如圖1描述了飛行器U1、U2以及 5個任務M1~M5的位置坐標,同時也表示將任務M1、M2和M4依次分配給了U1,將M3和M5分配給了U2,即一組任務分配解Θ1=〈M1,M2,M4〉以及Θ1=〈M3,M5〉。

圖1 多飛行器協同任務分配示意圖
利用0-1變量xij表示飛行器Ui執行任務Θi時是否執行第j個任務Mj:
(2)
通過為飛行器合理分配攻擊目標,保證飛行器編隊整體作戰性能最好。實際上,多飛行器協同任務分配是個排列組合優化問題,需要考慮以下的約束、代價與收益:

(3)
每個目標只能指派給一個飛行器,不能重復分配。此約束表示為
(4)

(5)
3)航程代價。飛行器需要飛行一定航程完成任務。通過將航程代價指標最小化,盡可能地減少資源消耗。飛行器Ui執行任務Θi的航程代價函數為
minLi=dis(Θi)
(6)

(7)
綜合上述分析,可得飛行器協同任務分配問題的數學模型為
(8)
s.t.式(3)和式(4)
xij∈{0,1},?i∈{1,2,…,Nu},?j∈{1,2,…,Nt}
式中:s1、s2和s3分別是威脅代價、航程代價以及攻擊收益對應的權重。類似文獻[15]的分析,本文均衡考慮威脅代價、航程代價和攻擊收益,因此設定s1=1、s2=1、s3=1。
2 基于MPSO算法的多飛行器協同任務分配方法
2.1 PSO算法原理
PSO算法中,一定數目的粒子組成種群,每個粒子代表問題的一個潛在解。每個粒子有兩個屬性:位置和速度。在種群進化過程中,粒子需要追蹤兩個極值:一個是粒子自身歷史的最優解,稱為個體極值;另一個是整個種群當前的最優解,稱之為全局極值。所有粒子基于這兩個極值更新位置和速度,從而盡快向最優解靠攏。如果問題的解是D維的,那么相應粒子的位置和速度都可看做D維向量。假設粒子Pk在t時刻的位置和速度分別是Yk,t=(Yk,t[1],…,Yk,t[D])和Zk,t=(Zk,t[1], …,Zk,t[D]),它們按照式(9)和式(10)演化:
Zk,t+1[j]=w·Zk,t(t)[j]+c1·Rand1·(pbestk,t[j]-Yk,t[j])+c2·Rand2·(gbestk,t[j]-Yk,t[j])
(9)
Yk,t+1[j]=Yk,t[j]+Zk,t[j]
(10)
式中:w稱為慣性權重,根據文獻[15]分析,通常情況下令w=0.721 3;c1和c2是自然常數,通常情況下令c1=c2=2;Rand1和Rand2是分布在[0, 1]之間的隨機數;pbestk,t是粒子Pk當前時刻t的個體極值;gbestk,t是種群當前找到的全局極值。在種群進化過程中,粒子Pk的任一位置分量Yk[j]被限制在最大位置Ymax和最小位置-Ymax之間,如式(11)所示:
(11)
傳統PSO算法流程如下:
1)設置粒子種群規模、最大迭代次數,初始化粒子位置和速度,計算每個粒子的個體極值和全局極值。
2)計算每個粒子的適應度函數值,如果該值優于該粒子當前個體極值,則更新該個體極值;如果某個體極值優于當前的全局極值,則更新全局極值。
3)按照式(9)和式(10)更新每個粒子的位置和速度。
4)如果迭代次數達到最大迭代次數,則停止迭代,輸出全局極值為當前最優解,否則,轉入步驟2。
2.2 用于多飛行器協同任務分配的MPSO算法
利用PSO算法解決多飛行器協同任務分配問題,需要解決以下兩個難點:1)任務分配問題屬于排列組合優化問題,其解空間是離散的,而傳統PSO算法只能給出連續性的解。因此,需要建立PSO連續性的解與離散化的任務分配方案之間的一一對應關系,即離散化PSO算法的解;2)PSO算法具有操作簡單、容易收斂的優點,但也容易過早陷入局部收斂。為解決上述兩個問題,本文將粒子的位置編碼為一組任務分配向量,然后將分配向量解碼為一組任務分配方案,實現了PSO算法連續性解的離散化。同時,基于模擬退火算法原理,本文提出一種跳出局部收斂的策略,根據策略運用生成新粒子,解決了局部收斂問題。
2.2.1 編碼與解碼
令粒子的位置和速度都是Nt維向量,即D=Nt,那么解空間也是Nt維。令粒子的位置上限等于飛行器的數目,即Ymax=Nu;令函數K(z)表示不大于z的最大整數,例如K(2.3)=2。
為了更好地解決任務分配問題,將粒子Pk的位置Yk編碼為一列分配向量Ak=(Ak[1],Ak[2],…,Ak[Nt]),
(12)
很明顯,因為Yk[j]∈[-Nu,Nu],可知Ak[j]是整數且Ak[j]∈[1,Nu]。
算例1考慮一個多飛行器協同任務分配問題,其中Nu=3,Nt=14,即將14個不同目標T1~T14分配給飛行器U1~U3。很明顯,其解空間是14維。將粒子Pk的位置和速度都限制在[-3, 3]之間,則相應的一組的位置和速度如表1所示。根據式(12)可得Pk對應的任務分配向量Ak,同樣如表1所示。

表1 一個粒子的位置、速度和相應的分配向量

算法1:
輸入:分配向量Ak
輸出:任務分配方案Θi,i∈{1,…,Nu};
1 for (iinNu){
2 for (jinNt){
3 if (Ak[j]=i){
4Ψ(i)=Ψ(i) ∪ {Tj};
5 }
6 }
7Start[i]=Bi,Θi=?,TN[i]=0; ∥初始化
8 }
9Ψ=?;
10 for (iinNu){
11 while (Ψ(i)≠?){
12 選擇Ts∈Ψ(i);
14Start[i]=Ts;
15TN[i]=TN[i] + 1;
16Ψ(i)=Ψ(i) {Ts};
17 將Ts添加到順序集合Θi的末尾;
18 }
19 else{∥當前給Ui分配目標超過其上限
20Ψ=Ψ∪Ψ(i);
21Ψ(i)=?;
22 }
23 }
24 } ∥初步分配
25 while (Ψ≠?){

27 選擇Ts∈Ψ;
28 選擇Um∈K;
29TN[m]=TN[m] + 1;
30Start[m]=Ts;
31Ψ=Ψ {Ts};
32 將Ts添加到順序集合Θm的末尾;
33 } ∥再次分配
34 輸出Θi,i∈{1,…,Nu};
算法1的數組Start和TN都是Nu維的,其中,分量Start[i]表示當前時刻分配給飛行器Ui的末尾目標,分量TN[i]表示當前時刻分配給飛行器Ui的目標個數。集合Ψ表示受限于飛行器攻擊能力約束、未能分配的目標集合。算法1可分為以下3個步驟:
1) (1~9行):根據分配向量Ak為每個飛行器Ui分配一組目標集合Ψ(i)。此時,Ψ(i)中目標的個數可能超過了Ui的攻擊能力上限,并且也沒有確定攻擊目標的順序。同時,初始化Start、Θi和TN,使得?i∈{1,…,Nu},Start[i]=Bi,Θi=?,TN[i]=0。



在初步分配過程中,對于U1,因為T9∈Ψ(1),將T9加入Θ1;接下來,Ψ(1)中剩余目標T10,將T10加入Θ1的末尾,依次類推,可得Θ1=〈T9,T10,T14,T12,T11〉,其數量達到了U1的任務能力上限,但此時Ψ(1)中還剩余一個未分配的目標T13,需要將T13并入Ψ,即Ψ={T13}。同理,可得Θ2=〈T1,T2,T3,T8,T4,〉,達到了U2的攻擊能力上限,但Ψ(2)中目標T7未分配,只能將T7并入Ψ,此時Ψ=Ψ∪ {T7}={T13,T7}。類似的可得Θ3=〈T5,T6〉。
在再次分配過程中,只有U3沒有達到攻擊能力上限。因此,需要將Ψ={T13,T7}中的目標分配給U3。先把T13分配給U3,再把T7分配給U3,即把T13和T7依次添加到Θ3的末尾,可得Θ3=〈T5,T6,T13,T7〉。

因為PSO算法是從初始種群開始進化,初始粒子的質量會影響算法的收斂速度。為了使得初始種群中粒子分布的更加均勻,本文令例子Pk的位置Yk的每個分量Yk[j]滿足[-Nu,Nu]之間的均勻分布,同理令Pk的初始速度向量Zk[j]也滿足[-Nu,Nu]的均勻分布。
2.2.2 基于模擬退火算法的跳出局部收斂的策略
傳統PSO算法很容易陷入局部收斂。受到模擬退火算法的啟發,提出一種使得PSO算法盡快跳出局部收斂、擴大搜尋范圍的方法。這種方法先以某種規則生成新粒子,然后按照概率函數判斷是否接受這個粒子的更新。
1)局部搜索啟動準則:為了平衡算法的對于解空間的開發和探索的能力,使用概率hk啟動粒子Pk的基于模擬退火算法的局部搜索過程,hk由式(13)計算:
hk=1-0.01×102g/max_g
(13)
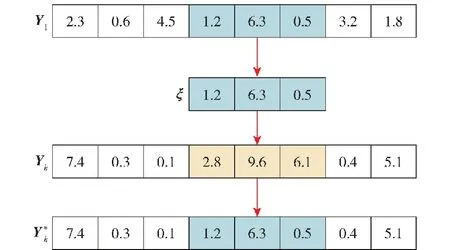
式中:g是當前迭代代數;max_g是最大迭代次數。即對于每個粒子Pk,產生一個隨機數r∈[0,1]。如果r 圖2 新粒子位置向量交叉與替換 算法2: 輸入:粒子Pk、個體極值對應的粒子Pbestk和全局極值對應粒子Pgbest; 輸出:新粒子Pk; 1 計算F(Pk)和F(Pgbest); 2 if (Ω1=F(Pk)-F(Pgbest)>0){ 5 if (Ω>0){ 6r=random[0, 1]; 7 if (r≤exp[-Ω1×Ω]) 9 else{ 11 } 12 } 13 輸出:粒子Pk; 2.2.3 飛行器任務分配問題的MPSO算法 本文提出了一種用于多飛行器協同任務分配的MPSO算法。首先,限定了粒子的位置大小,根據式(12)將粒子的位置編碼為一組分配向量。然后,將得到的分配向量作為算法1的輸入,解碼得到一組滿足約束式(3)的任務分配方案。在PSO算法更新進化過程中,每個粒子按照式(8)和式(9)來調整自己的速度和位置。選擇合適的適應度函數,盡可能地減少飛行器付出的威脅代價和航程代價,提高飛行器編隊的總體攻擊收益。同時,提出的新粒子生成策略利用了模擬退火算法的思路,保留了全局極值的有效片段,以一定概率決定是否保留生成的新粒子,有效緩解PSO算法容易陷入局部收斂的問題。 MPSO算法流程如下: 1)初始化種群中的粒子的速度和位置,設置迭代次數max_gen,令g=0。計算全局極值和每個粒子的個體極值。 2)對每個粒子Pk執行如下的操作: ①執行算法2更新粒子Pk; ②根據式(12)將Pk的位置編碼為分配向量Ak; ③執行算法1,將Ak解碼任務分配方案Θi,i∈{1,…,Nu}; ④根據得到的任務分配方案,計算適應度函數F(Pk); ⑤更新每個粒子的個體極值和全局極值; 3)根據式(8)和式(9)更新每個粒子的速度和位置,令g=g+1。 4)判斷迭代是否結束,若g 5)輸出全局極值及對應的任務分配方案。 算例3任務區域有15個目標T1~T15,3架飛行器U1~U3。目標和飛行器的位置、價值、威脅等屬性都是隨機產生,如表2和表3所示。本文分別用3種PSO算法(MPSO算法、PSO算法、PSO1算法)和一種GA求解此問題,并對比分析實驗結果。驗證平臺是基于2.3 GHz的Core i9 9880H的MacBook Pro計算機,使用Python編寫程序。其中,MSPO算法是由本文給出的算法;PSO算法利用了本文提出的算法1對粒子進行編碼與解碼,但沒有試圖解決局部收斂問題;PSO1算法由文獻[15]給出,粒子的更新過程中沒有修復粒子對應的解,保留了不滿足要求約束條件的解;GA由文獻[4]給出。 表2 目標情況 利用MPSO算法、PSO算法、PSO1算法和GA分別求解此任務分配問題。分別運行10次程序,并記錄平均適應度值以及最優適應度值,圖3給出了運行過程中各個算法的最優適應度值變化過程。得得到的各個算法最優解如表4所示。平均適應度值和最優適應度值如表5所示。從表5中可以看到,MPSO算法給出了最優結果562.85,PSO算法給出次優結果567.44,PSO1算法和GA給出的結果分別是574.55和563.08。很明顯,MPSO算法要比其余3種算法性能更好。 表4 不同算法得到的最優分配解 圖3 系統程序運行適應度值變化 因此,無論從最優適應度還是平均適應度來看,MSPO算法都給出了最好結果。 本文提出的MPSO算法在解碼粒子時修正了對應的任務分配解,使之滿足約束條件,并且引進了基于模擬退火算法的跳出局部收斂策略。分析可知:1)MPSO算法在更新粒子時,接受性能好的粒子,以一定概率接受性能較差粒子,而PSO算法不會接受性能較差的粒子。因此,在迭代初期,PSO算法表現要優于MPSO算法,但是到算法迭代后期,隨著接受較差粒子的概率降低,MPSO算法體現出跳出局部極值的優點,這與圖3中結果相一致;2)PSO1算法在更新粒子時沒有修正對應的解,保留了不可行解,因此與MPSO算法和PSO算法相比,PSO1算法的性能較差,這也在圖3中得到了體現;3)GA沒有修正解碼后的解,只保留可行解,因此收斂速度較慢、性能較差。 本文以水平二維戰場環境多架飛行器多對地面目標開展協同攻擊為研究背景,提出一種用于任務分配的MPSO算法。得出以下主要結論: 1)傳統PSO算法給出的解是連續量,而多飛行器任務分配解是離散量。為了解決這一問題,本文將粒子的位置屬性編碼為任務分配向量,并從任務分配向量中解碼出對應的任務分配解,即實現了PSO算法解的離散化。 2)傳統PSO算法收斂較快,容易陷入局部收斂。為克服這一問題,本文提出一種基于模擬退火算法的跳出局部收斂策略。將這種策略嵌入到傳統PSO算法中,能有效地提升PSO尋優的能力。 3)數字仿真表明,本文提出的MPSO算法性能要優于傳統PSO算法以及GA。



3 實例仿真



4 結論
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36艦船科學技術(2022年13期)2022-08-11 09:30:02鐵道通信信號(2020年9期)2020-02-06 09:15:22漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43小學科學(學生版)(2019年5期)2019-05-21 01:00:18中學生數理化·中考版(2018年10期)2018-12-07 00:44:52經濟技術協作信息(2018年30期)2018-11-22 06:20:24中央社會主義學院學報(2017年1期)2017-04-16 05:34:07中國衛生(2014年12期)2014-11-12 13:12:40